
Abstract
In order to optimize the performance of permanent magnet synchronous motor (PMSM) drives, a fractional-order sliding mode (FOSM) control scheme combining generalized proportional integral observer (GPIO) is adopted in this paper. A FOSM controller is firstly employed to reduce the negative effects of the load torque and parameter variations in the PMSM system. However, the FOSM control method mostly needs high control gain to moderate the unfavorable effects of the total disturbance, which will inevitably lead to large chattering phenomenon. Therefore, the unknown lumped disturbance is effectively estimated by using a GPIO, and the estimated value is synchronously compensated to the FOSM speed controller. Even if a smaller control gain is chosen, the robustness of the proposed composite GPIO-based FOSM controller is better than that of the FOSM controller. Finally, the effectiveness of the proposed control strategy is verified by comprehensive simulation and experimental results.
Keywords
Introduction
Attributing to the superior characteristics of high reliability, the lower acoustic noise and simple structure, permanent magnet synchronous motor (PMSM) has been widely used at home and abroad in the past few decades.1–4 Meanwhile, with these distinctive advantages, PMSM has been successfully used in various industrial fields, such as computer numerical control machines, feed drive systems, and autonomous guided vehicles, etc. However, in the presence of system parameter variations and unknown external interference, the traditional linear proportional integral (PI) controller can scarcely acquire the high-precision control requirements.5,6 In order to solve the problem of poor control performance, a variety of nonlinear control methods have been used to improve the control accuracy, such as fuzzy control,7,8 predictive control, 9 robust control, 10 and sliding mode control (SMC),11–14 etc.
Among these various nonlinear algorithms, the SMC is a simple and effective control method.15,16 Due to its insensitivity to system parameter variations and load torque, the tracking accuracy of PMSM drive system can be improved. 17 A conventional first-order sliding mode control algorithm was designed in Lu et al. 18 to optimize the operation of PMSM system. Unfortunately, parameter uncertainties and unmodeled dynamics of the PMSM system have not been fully considered, which limits the application of this kind of SMC method in practical engineering. In addition, linear sliding surface was constructed in Lu et al., 18 the speed error can only be asymptotically stable. The traditional terminal sliding mode control (TSMC) method was developed in Liu et al. 19 to obtain the satisfactory convergence rate. However, even if the speed error can converge to the neighborhood of zero in finite time, it may cause singular problem in the closed-loop system.
It should be noted that the upper bound of the total disturbance is generally hard to be measured. To achieve good anti-disturbance performance, the control gain of SMC method is typically chosen to be large enough to suppress the external load torque, which may inevitably cause severe chattering phenomenon.20–22 To further alleviate the inevitable chattering phenomenon, some optimization methods have been employed in previous literatures. By choosing a proper exponential term to construct a novel reaching law, the tough problems of large chattering phenomenon and long reaching time in conventional first-order SMC method were solved. 23 Moreover, an adaptive TSMC controller was proposed in Shao et al. 24 to guarantee the system states converge to origin in a finite time. Adopting a brand-new adaptive law to adjust the value of the switching gain, the chattering caused by overestimated control gain can be further reduced. With the rapid exploitation of intelligent control technique, a brand-new SMC controller based on the neural network strategy is proposed in Jon et al. 25 Nevertheless, the industrial application of intelligent control usually needs strict hardware condition, which limits its large-scale industrial application. Fortunately, the fractional-order calculus technique with unique characteristics of attenuating old data and saving new data can solve these relatively aforementioned issues.26,27
As is known to all, exploiting the disturbance observer (DOB) to measure the total interference is one valid approach to avoid overestimated control gains. Compensating the estimated value to the feedback controller, the closed-loop system can achieve excellent tracking and strong robustness performance simultaneously without choosing a large control gain.28,29 Hence, the exploitation of DOB has received much attention, and many novel kinds of DOBs have been used in PMSM systems. A full-dimensional DOB was constructed in Mohamed 30 to further optimize the anti-interference capability of PMSM system with rapidly changing external load torque. An extended state observer (ESO) without exact knowledge of the speed regulation system was developed in Zuo et al. 31 to avoid the performance deterioration of PMSM system under load torque and system uncertainties. Nevertheless, if a state feedback controller is constructed using only PI control approach, the anti-interference performance of PMSM system needs to be enhanced urgently. Later, a generalized proportional integral observer (GPIO) combined with SMC controller was presented in Huo and Ding, 32 which enhances the robustness.
In this paper, a fractional-order sliding mode (FOSM) controller combined with GPIO is constructed to improve the anti-interference capability of the PMSM system. First of all, a FOSM controller is proposed to ensure that the motor can track the desired speed. Secondly, to solve the tough issue of poor performance caused by high control gain, the unknown total disturbance is directly estimated by using a GPIO with simple structure, and the estimated value is synchronously compensated to the FOSM controller. Finally, the effectiveness and feasibility of the developed control approach will be proved through simulation and experimental results. The contribution of this paper could be summarized in the following two aspects:
By using the advantages of fractional-order calculus technique in the sliding mode controller, the chattering phenomenon can be reduced and the anti-interference property can be enhanced.
In order to avoid the unsatisfactory control performance caused by the high switching gain of the FOSM controller, a GPIO is employed to observe the total disturbance.
The remaining parts of the paper are arranged in the following manner. Section 2 describes the mathematical model of PMSM system in detail. The proposed GPIO-based FOSM control method is developed in Section 3. The simulation and experimental results are presented in Section 4. Finally, Section 5 draws the conclusion.
Mathematical model of PMSM
Assuming that the motor is an ideal controlled object, the current and motion equations of PMSM in the synchronous
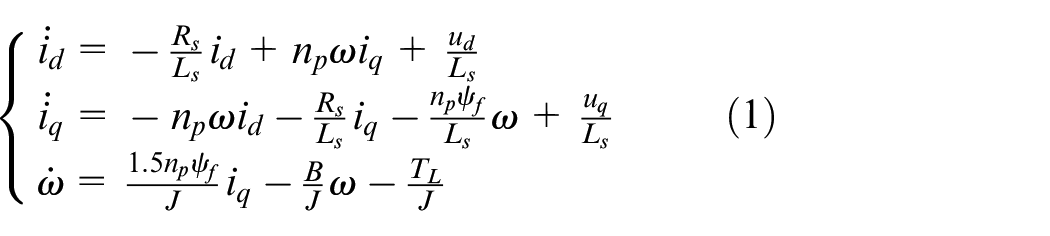
where
Now, the stator current

where
Composite controller design
Design of GPIO
Assuming that the total disturbance

where
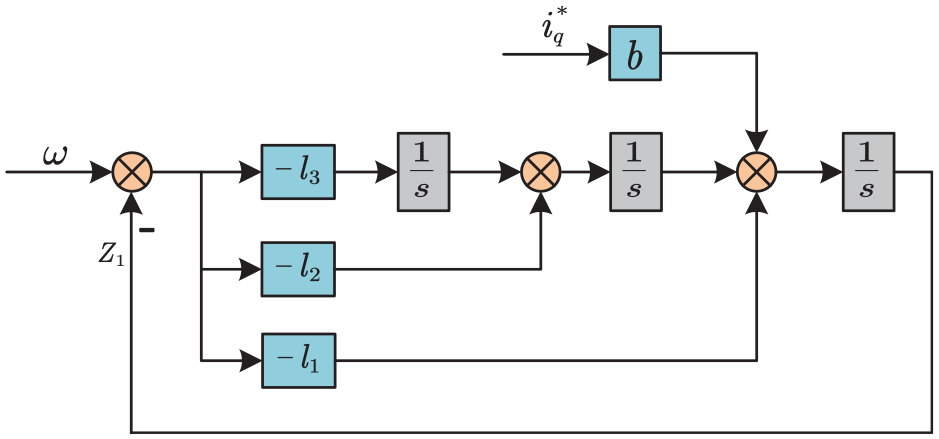
Block diagram of the proposed GPIO.
Letting

Then, equation (4) can also be rewritten as

where

Since matrix
Design of FOSM controller
In this subsection, a FOSM is proposed for the PMSM speed regulation system. Using the unique advantages of fractional calculus, the chattering phenomenon existing in conventional SMC methods can be obviously eliminated. With the development of the fractional calculus theory, many different definition approaches for fractional calculus have emerged, such as Caputo definition, Grunwald-Letnikov definition, and Riemann-Liouville definition. 27
Setting

For equation (2), the PMSM speed regulation system can be represented as

Firstly, we choose the FOSM surface as

where
Differentiating the sliding variable of

Selecting a rational reaching law can alleviate the chattering and improve the anti-interference property of the PMSM system. In this paper, a exponential reaching law is selected to construct the FOSM controller. Hence, we have

where
Therefore, the FOSM controller can be constructed as

In order to guarantee the stability of the PMSM speed regulation system, the reaching condition should be met. On this basis, the Lyapunov function should be used to complete the proof.

Evaluating the time derivative of
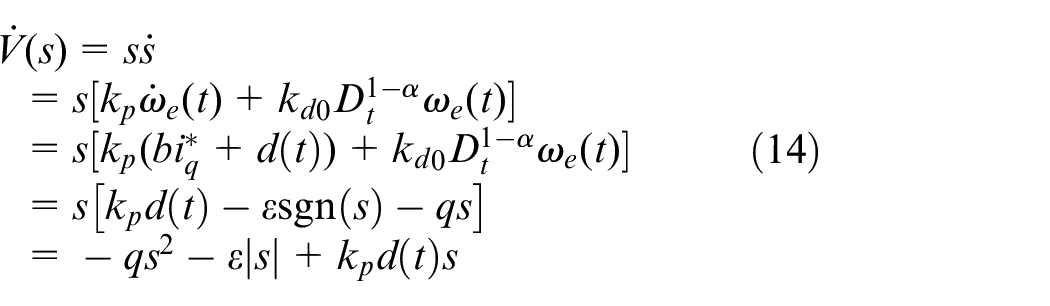
Noting that
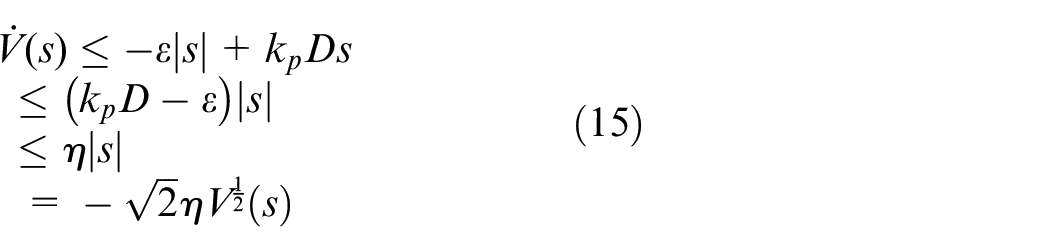
In the light of the finite-time Lyapunov theory in Levant, 34 one can conclude from (15) that the system states will reach the sliding surface in a finite time. Apparently, the system states reach the sliding surface (9), which means that the states asymptotically converge to the zero. This completes the proof.
Next, since the total disturbance
Accordingly, the configuration of the presented FOSM + GPIO control framework is shown in Figure 2.
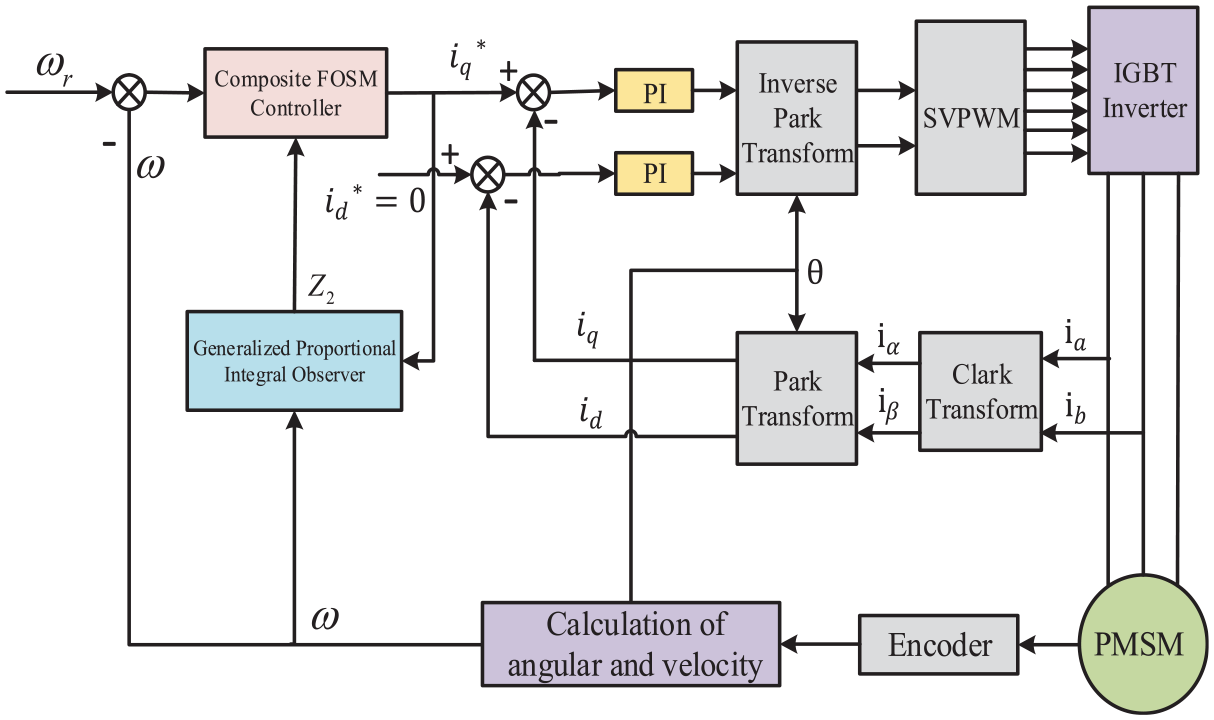
Block diagram of the designed PMSM control scheme.
Simulation and experimental results
In order to verify the advantages of the control algorithm designed in this paper, the comparative analysis between the composite FOSM + GPIO and pure FOSM controllers are performed. The control algorithm is based on space vector pulse width modulation (SVPWM) control with
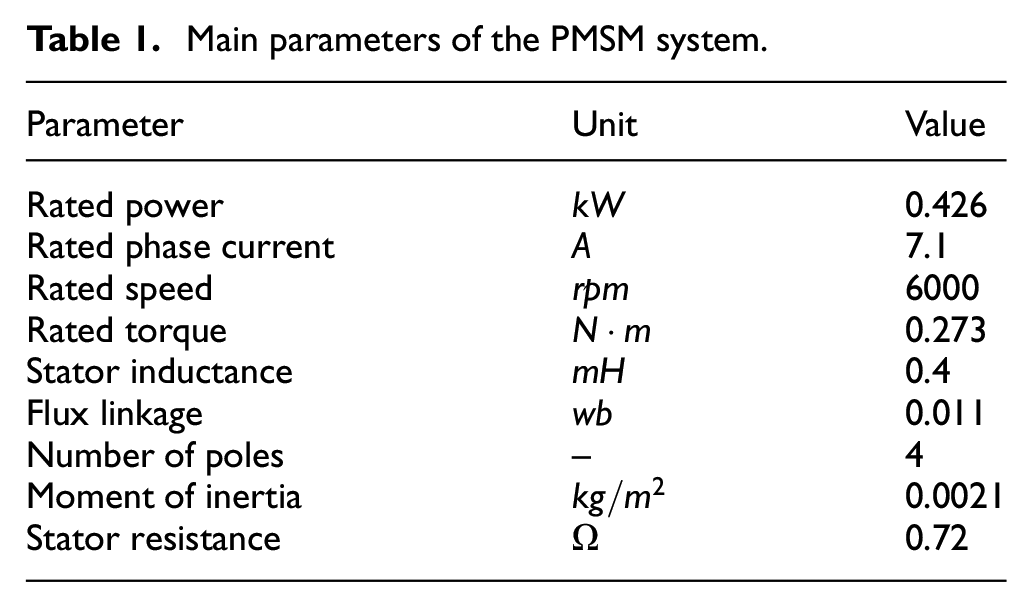
Main parameters of the PMSM system.
Simulation results
When adjusting the parameters of these two control strategies, we will consider anti-interference ability and current ripple at the same time. The gains of FOSM and FOSM + GPIO controllers are selected as follows:
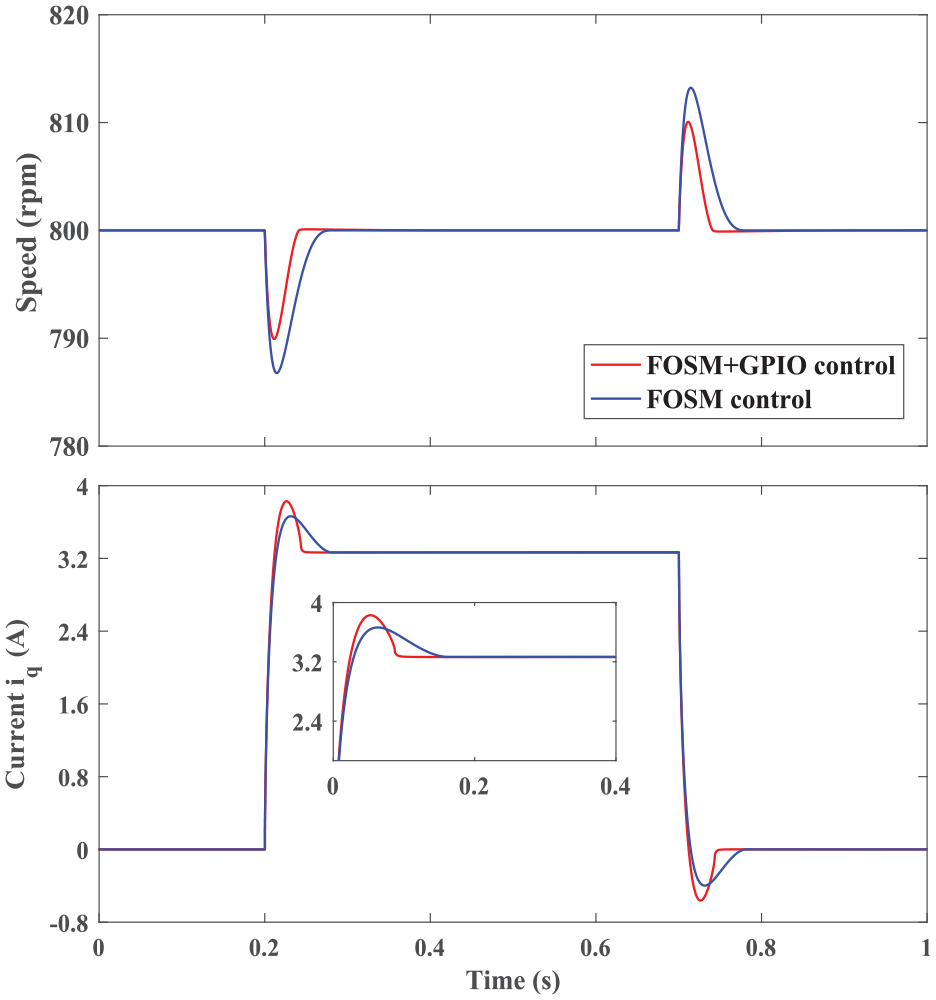
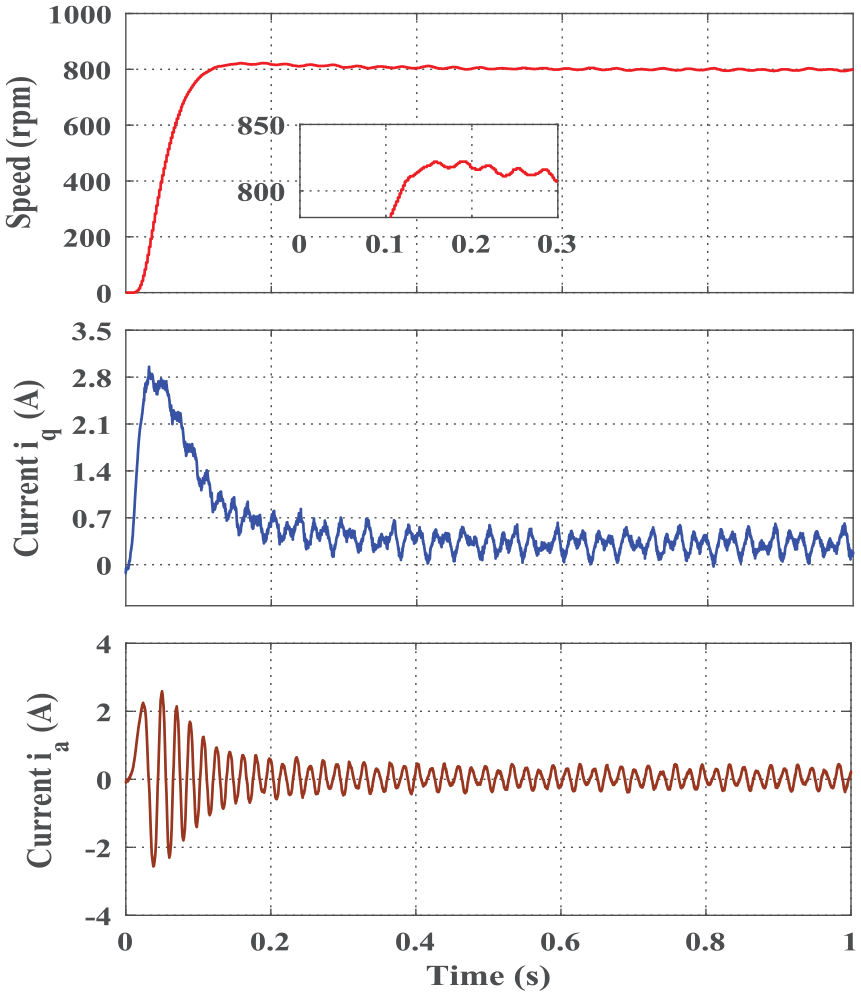
Figure 3 illustrates the step responses of the pure FOSM and composite FOSM + GPIO control methods at the desired speed of 800
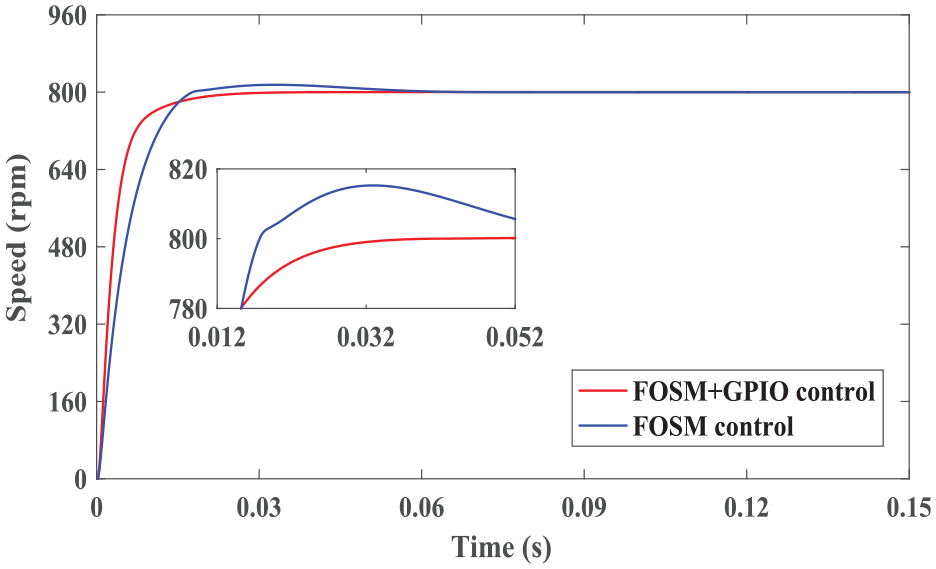
Simulation results under the step change of speed.
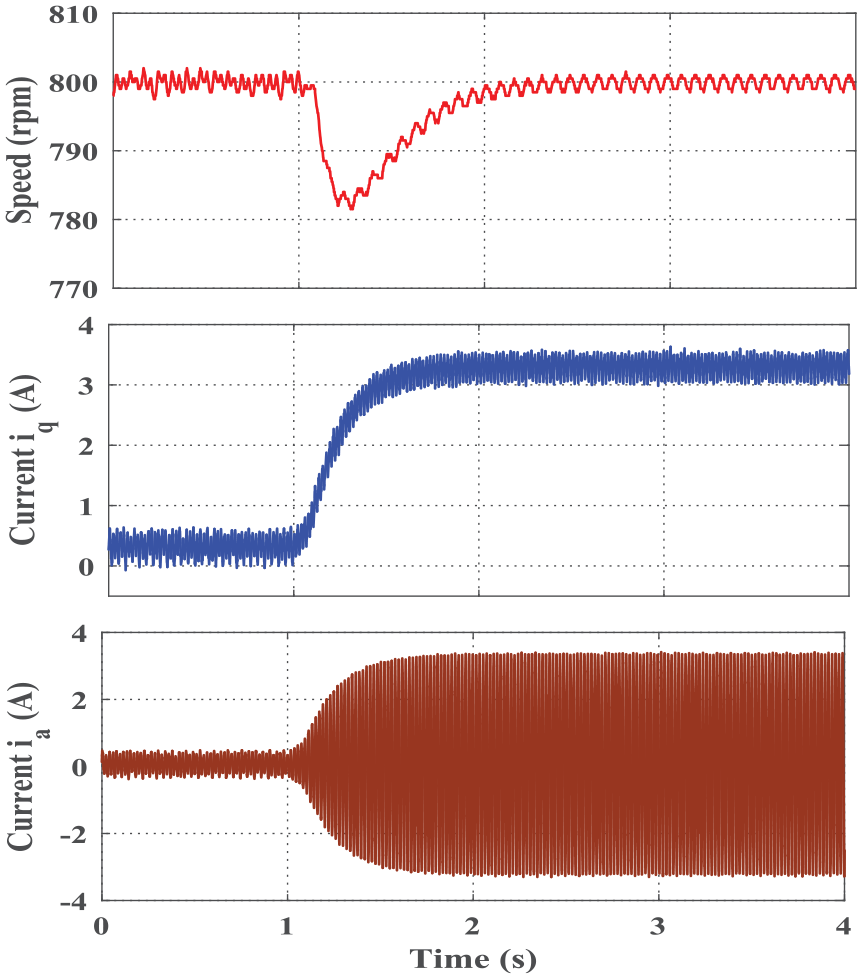
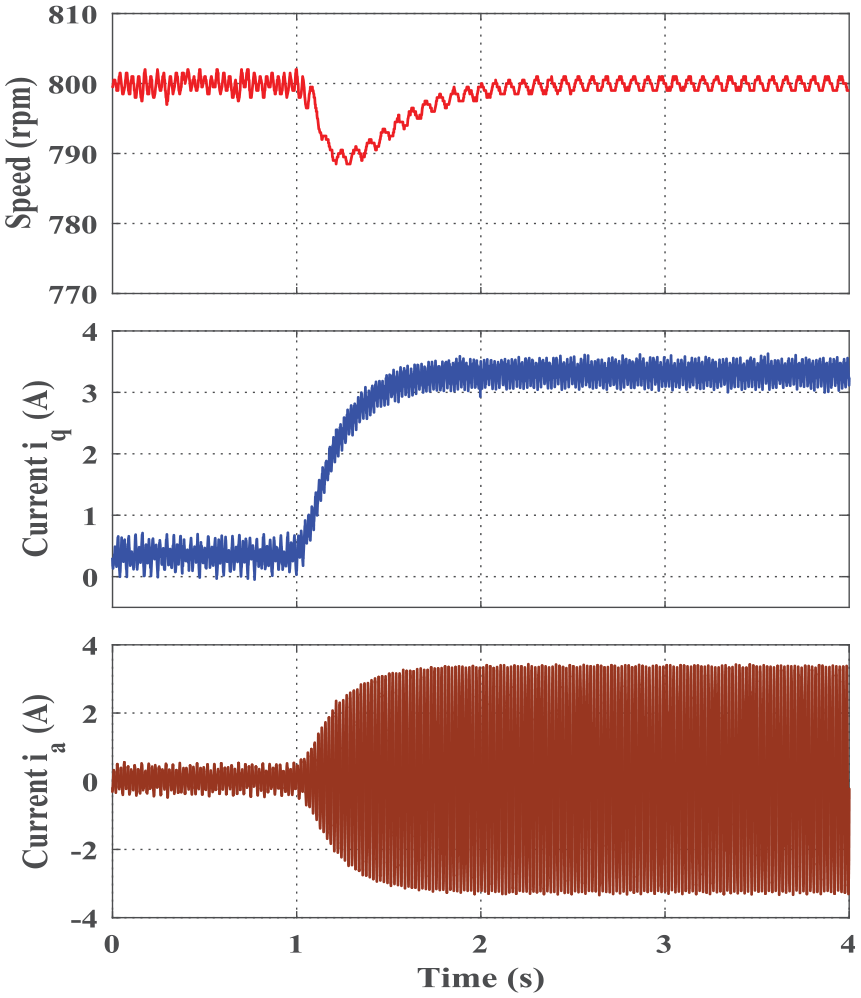
To demonstrate the estimation performance of the GPIO, a load torque is suddenly added to the PMSM system at 2
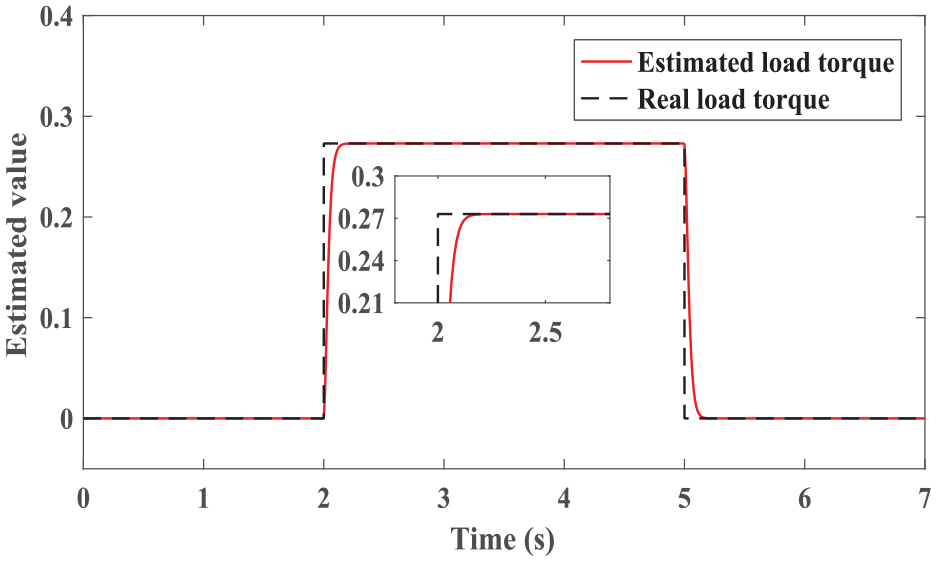
Time response of the load torque estimation under GPIO.
Simulation results under a sudden load torque.
Experimental results
To further confirm the excellent performance of the developed FOSM + GPIO controller, an experiment bench based on ETL-PCI-662 DSP is built. A three-phase pulse width modulation (PWM) inverter with an intelligent power module (IPM) to drive the motor. The experimental equipment is shown in Figure 6. Two Teknic three-phase motors are utilized to implement the comparative experiments. The proposed control algorithm is tested on one test motor, and the load torque is obtained on another motor. The sample and control frequency are both selected as 10 kHz.
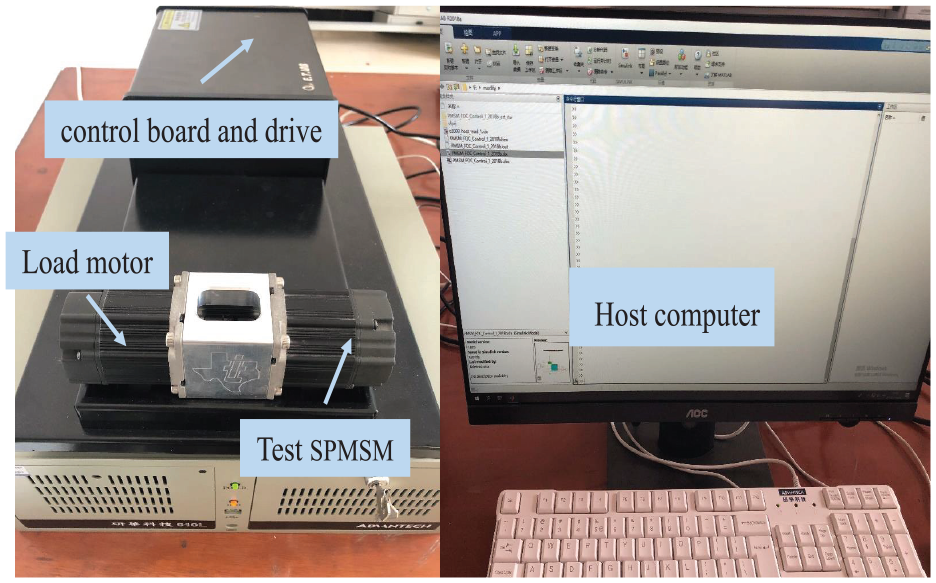
Experimental setup.
In order to acquire fair experimental results, we will adjust the parameters of pure FOSM and composite FOSM + GPIO controllers to achieve the best control capability. First of all, Figures 7 and 8 presents the step responses under pure FOSM controller and composite FOSM + GPIO controller respectively. The motor reference speed is set to 800
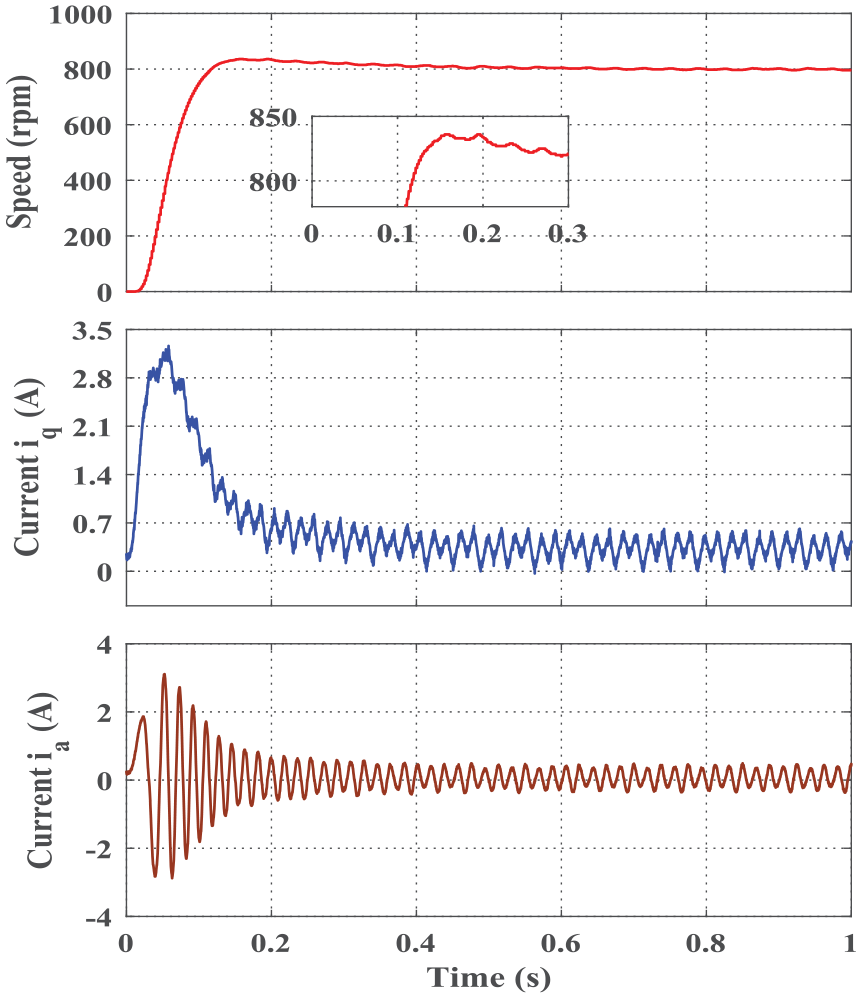
Experimental results of FOSM controller under the step change of speed.
Experimental results of FOSM + GPIO controller under the step change of speed.
Next, when the motor is running in a stable state, we further test its ability to resist the change of load torque. Figures 9 and 10 presents the experimental results of PMSM speed regulation system under the condition of increasing full load. Compared with pure FOSM controller, the proposed composite FOSM + GPIO control method has better anti-interference property. Figures 9 and 10 display that the anti-interference capability of composite FOSM + GPIO controller is superior than pure FOSM approach. Although the values of control gains in FOSM + GPIO controller is smaller than those in FOSM controller, the quick compensation of the external interference by GPIO can further optimize the robustness. Moreover, large control parameters
Experimental results of FOSM controller under a sudden load torque.
Experimental results of FOSM + GPIO controller under a sudden load torque.
Due to the existence of dead time, turn-on/off delay and voltage drop across switches in PMSM system, the VSI nonlinearity phenomenon is inevitable. In addition, the VSI nonlinearity may cause the control performance degradation in low-speed range. Therefore, it is very important to show the comparison experimental results of the proposed two controllers at low speed region. Figures 11 and 12 show the response curves of speed, current
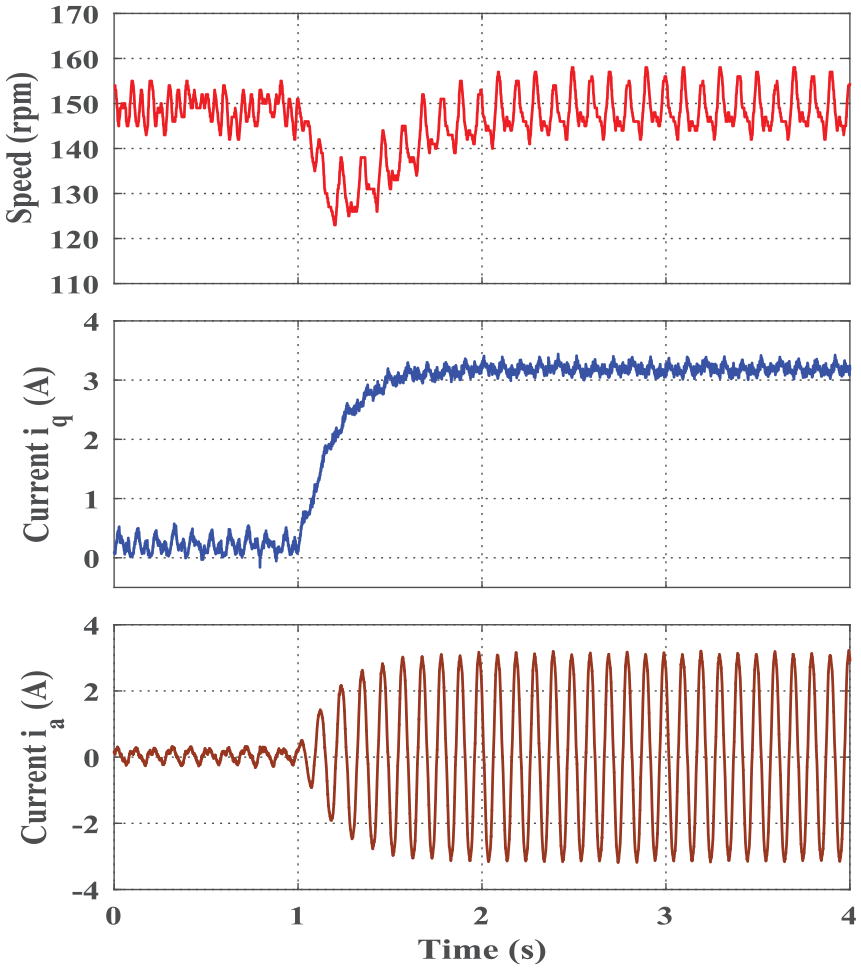
Experimental results of FOSM controller under a sudden load torque in low speed range.
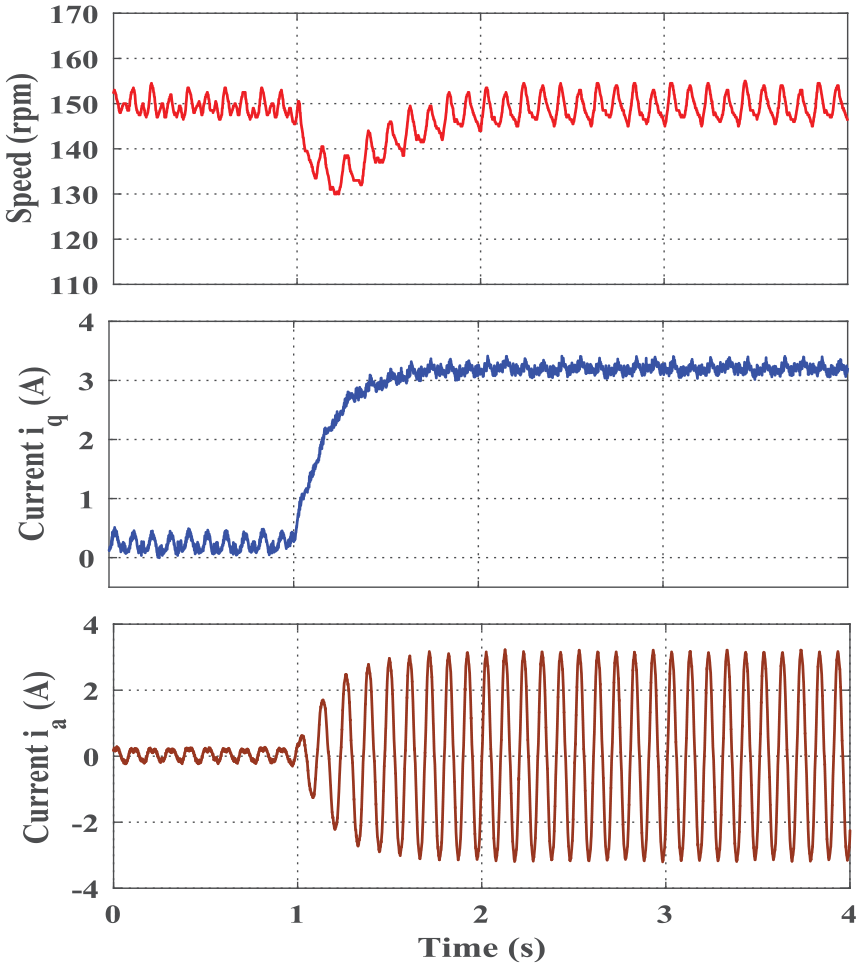
Experimental results of FOSM + GPIO controller under a sudden load torque in low speed range.
In general, the above simulation results are consistent with the experimental results. Therefore, we can conclude that the performance of composite FOSM + GPIO control method is superior than pure FOSM control strategy.
Conclusions
In this paper, a GPIO-based composite FOSM control method has been designed to upgrade the control capability of the PMSM system with unknown external disturbance and load torque. Compared with pure FOSM control method, the proposed composite FOSM + GPIO controller can provide stronger anti-disturbance performance and produce less chattering. Intensive simulation and experimental results have demonstrated the effectiveness and robustness of the designed control scheme. Our future work will concentrate on solving the problems of input saturation, parameter uncertainties, and current-loop optimization.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Special fund project for transformation of scientific and technological achievements in Jiangsu Province under Grant BA2020004 and the Jiangsu Provincial Industrial and Information Industry Transformation and Upgrading Special Fund Project.