
Abstract
This paper compares three different position controllers of electrical drives equipped by binomial
Introduction
For several decades, the control of DC motors has been one of the basic items in the theory of servomechanisms. P-PI controllers were among the most widely used structures, and in terms of control signal limitations, the design was usually oversized so that their application never took place. However, in automotive applications of DC motors used as actuators to drive cars (e.g. in the control of “trains” of cars virtually coupled into platoons as proposed by,1,2) one of the basic differences is to comply with the constraints of the control variable to the extent that their maximum accelerations or braking are considered as standard components of a working cycle. The second important component, especially when dealing with electric vehicles, is the lowest possible electricity consumption, which also requires the best possible filtering with regard to the ever-present measurement and quantization noise.
The paper aims at improving performance of servo drives by modifying the traditional controller structure. Thereby, it focuses on elimination of an adverse impact of the control constraints and of the quantization and measurement noise. As generally known, mechatronics aims at producing higher-quality products at reduced costs component. This may be achieved by integrating the best design practices with the most advanced technologies. The inclusion of constraints in the controller design makes it possible to reduce the size and rated power of the drives used in motion control by a relatively cheap software. Furthermore, suppression of measurement noise induced controller output variation can significantly reduce overall energy expenditure, heat losses, mechanical wear of equipment and associated unwanted noises. While using the newly proposed algorithms seem to be more sophisticated at the first glance, their design, setup and implementation are ultimately comparable or simpler to the traditional linear solutions.
The necessity to deal with the constraints naturally emerges in the control of unstable and marginally stable systems and with high demands on the dynamics of transients. Historically, the development of constrained control started with a relay minimum time control. 3 After some decline in research activities in the third quarter of the previous century, the interest in constrained control intensified again.4–8 As a by-product of a development chain initiated by a modification of the discrete time minimum time control,9,10 a constrained PID control has been developed, representing an alternative modular solution to traditional PID control. Firstly, an explicit discrete-time minimum time control 11 has been derived and then generalized to constrained pole assignment control. 12 Subsequently, it has been extended also to a continuous-time control and augmented by a disturbance observer (DO)13–15 to alleviate impact of uncertainties and disturbances. For an improved noise attenuation, different modifications considering filtration have been proposed. As typical examples, a traditional PI speed controller may be replaced by DO based filtered PI (FPI) control and, similarly, instead of a windup-sensitive PID, a DO-FPID control may be proposed.
One of the advantages of such DO based filtered solutions is their modular character offering several extension possibilities. Thus, they may be, for example, extended to a constrained control without facing problem of excessive integral action (windup). The core of a positional controller presented in this paper may be established by a constrained pole assignment PD controller (CPD). When derived for a double integrator, it plays a similar role as the fhan function in active disturbance rejection control (ADRC). 16 With the aim to demonstrate the broad design possibilities, a continuous-time solution, not yet known in ADRC, will be presented. The solution is also appropriate for a discrete-time control with smaller sampling times.
Basic PD control has been augmented by the disturbance observer based integral (I) action to filtered PID control denoted as DO-FPID control. Its constrained modification will be referred to as DO-CFPID. 17 It enables an extension of the spectrum of available approaches, which yield a time suboptimal dynamics (close to sliding mode control 18 ) with simultaneously keeping the control limits with the input usage near to the unavoidable minimum.
In the field of electric drives, P-PI control structures are widely used. Usually, the inner (velocity) loop is PI-based and the outer (position) is P-based. The inner loop must have I-term in order to get rid of control error. The position and speed feedback signals may be filtered to decrease the noise impact in the torque reference signal. This kind of loop structure is in this paper denoted as FP-FPI control. The drawback of a P-PI control is an overshooting in the output position for high step changes in the reference position signal. This effect may either be eliminated by using conditioning-technique-anti-windup solutions 19 (for cascade structure), or by applying a continuous position setpoint signal with a specified acceleration and speed of the motion (the so called command shaping, 20 or trajectory generating, 21 ) or by a modified loop tuning. This is, however, leading to sluggish transients for smaller setpoint changes and to a stronger disturbance impact. DO-CFPID includes an appropriate command shaping intrinsically, while working with chosen closed loop poles and respecting the given control constraints for any setpoint changes.
The comparison with other considered alternatives shows that the main benefit of the article lies in a simple explicit algorithm of DO-CFPID controller for constrained positional systems and in an integrated tuning procedure allowing to take into account always present delays, whether delays of actuator, sensors, program, communication or noise attenuation filters. Because the controller is formulated in the continuos-time domain, it can be used for arbitrarily small sampling periods, making it competitive (at least in the single-input-single-output area) even compared to predictive control (MPC)-based control algorithms.22–24 Its superiority excel in steering with little impact of the friction forces compared to inertial forces, which is for example, typical for control of transport vehicles, or in different nano applications.
The paper is structured as follows. In the next section, performance measures used in the controller optimization are described. Then, the controlled system with the DO-CFPID controller are characterized. The comparative framework is established by introducing P-PI controllers. All proposed control structures are then illustrated by the real-time experiments. The achieved results and future work are summarized in Conclusions.
The control performance measures
For a setpoint

The output deviations from monotonicity may be evaluated by a modified total variation (sum of absolute increments) during the output course from the initial value

The effective control effort should be spent on the inevitable acceleration and braking, which corresponds to a two-pulse (2P) input

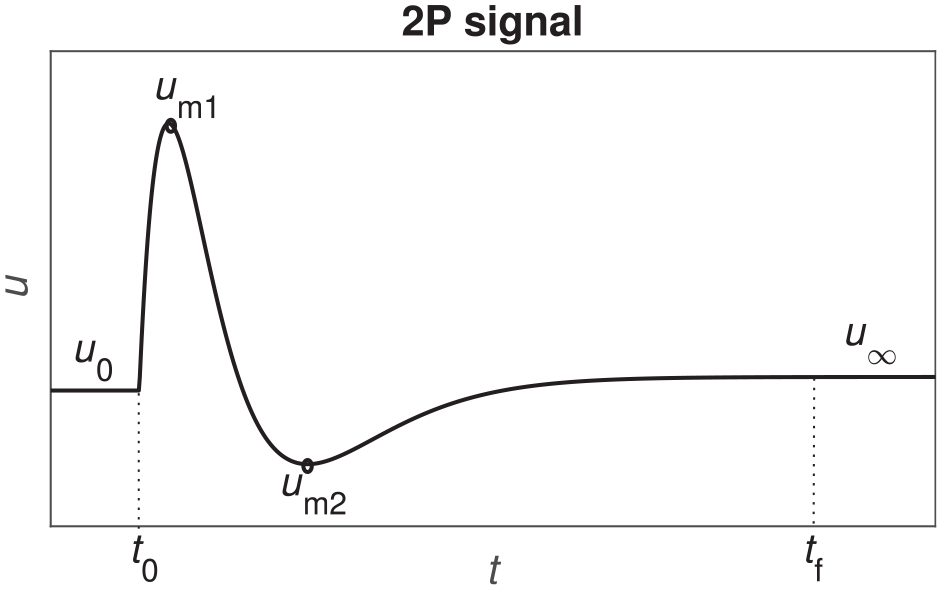
Two-pulse signal consisting of three monotonic intervals.
Ideally,
DO-CFPID structure and its tuning
The mechanical drive subsystem is approximated by the model (4), where

A variable load, unmodeled dynamics and model uncertainties will be modelled by input disturbance

A torque generator dynamics approximated by a dead time

will be taken into account when selecting the closed loop poles.
Constrained PID control for the second order plant
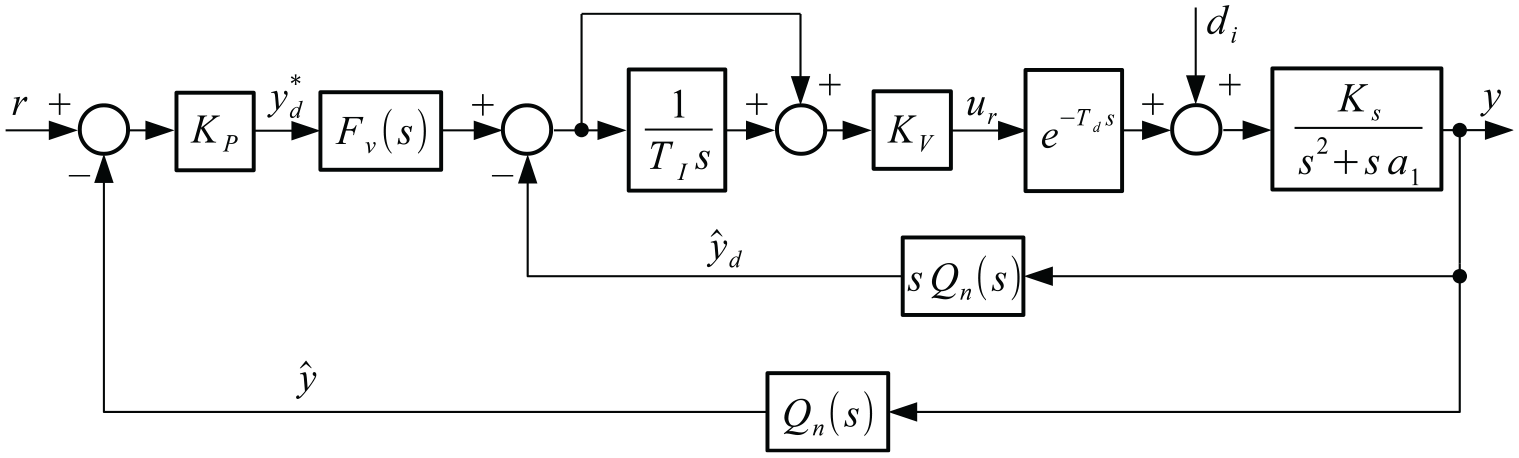
The structure of a DO-CFPID positional control is in Figure 2. Here,
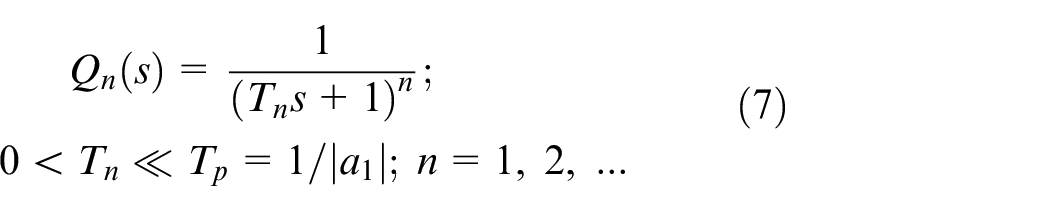
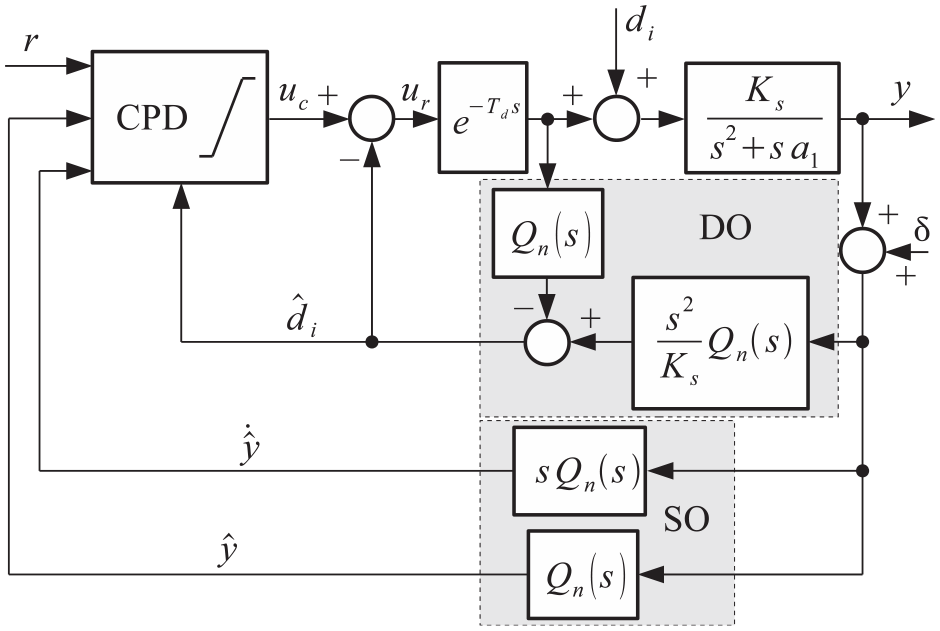
DO-CFPID controller with a disturbance observer (DO) based on a double integrator inversion augmented by a filter
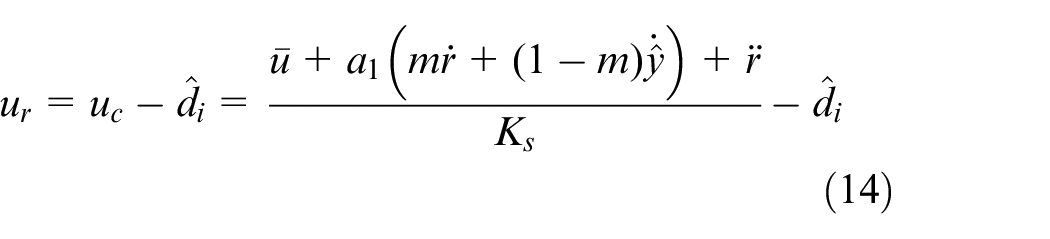
Le us denote the controller inputs
DO-FPI controller tuning
For the plant (4) with

The tuning parameter

By keeping a constant

This formula represents an alternative to the “half-rule” introduced in Skogestad 25 which may be applied in a broader range of filter parameters without causing side effects as overshooting, or oscillations.
DO-FPID controllers working in linear mode with ideal transient shapes yield for disturbance step

After substituting for the gain of the controller

Constrained PD control for the second order plant
The constrained PD controller (CPD)
26
and its DO-based extension
17
drive the plant trajectories toward an optimal braking curve corresponding to the given constraints and chosen closed loop pole. Thereby, the fastest possible decrease of the velocity and position amplitudes during the braking phase is guaranteed that does not violate the ideal shape requirements at the input and output. Its design is usually accomplished in a phase plane with the state variables

(with the limit parameter value
Thereby

The weighting coefficient
The model output

applied for
or to constrained linear controller output

The model constraints

P-PI and FP-FPI positional controllers
The P-PI control structure (Figure 3) is built from a P position and PI speed controllers. In the Laplace transform

P-PI positional control for
The symbols in (20) have the following meaning:
If loop dead times are substituted by the first order, that is,
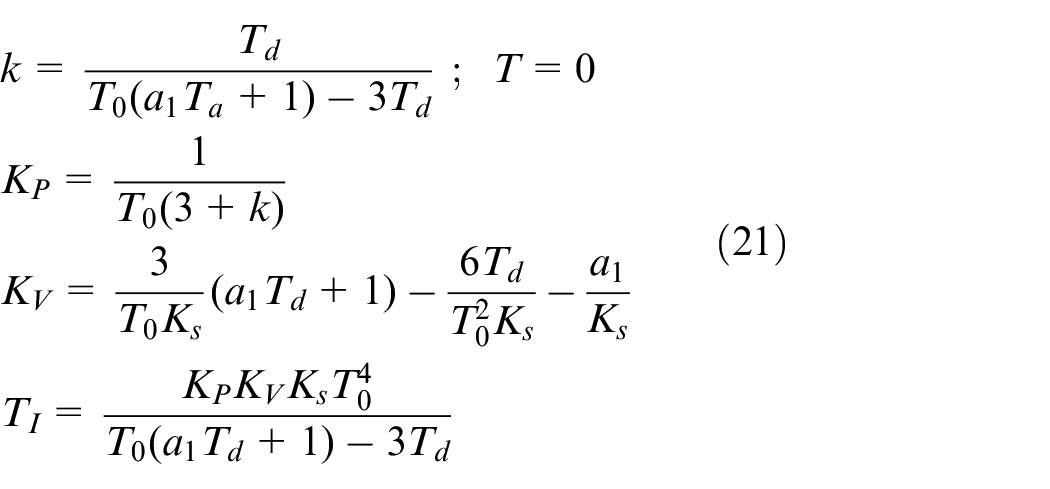
For FP-FPI control
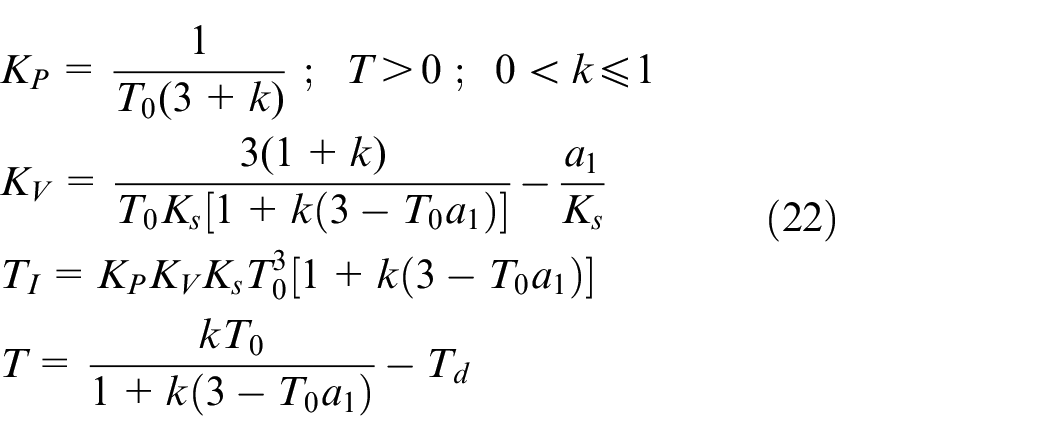
In case of a FP-FPI control the value of the parameter
The time constants


In the rest of paper, the value
Experimental results
Experiment setup
A key element of the workplace (Figure 4) is a servo system with two electric drives. The shafts of the motors used in these drives are mechanically connected by means of a rigid coupling. A BLDC motor is used in one drive and a DC motor is used in the other drive. Both drives operate in torque mode, where they act as torque generators. The drive with BLDC motor is controlled, that is, it is used in the position control loop. The DC motor drive represents the load and serves to generate a disturbance for the position servo drive. Actual position information is obtained by evaluating the signal from the incremental rotary encoder (IRC) with 1024 pulses per revolution. The IRC output is connected to the input of the MF634 multifunction I/O card, which counts the IRC pulses. The actual position information is read from the MF634 card into the Matlab, where the control algorithm of the position loop is implemented. Parameters of the servo system are:
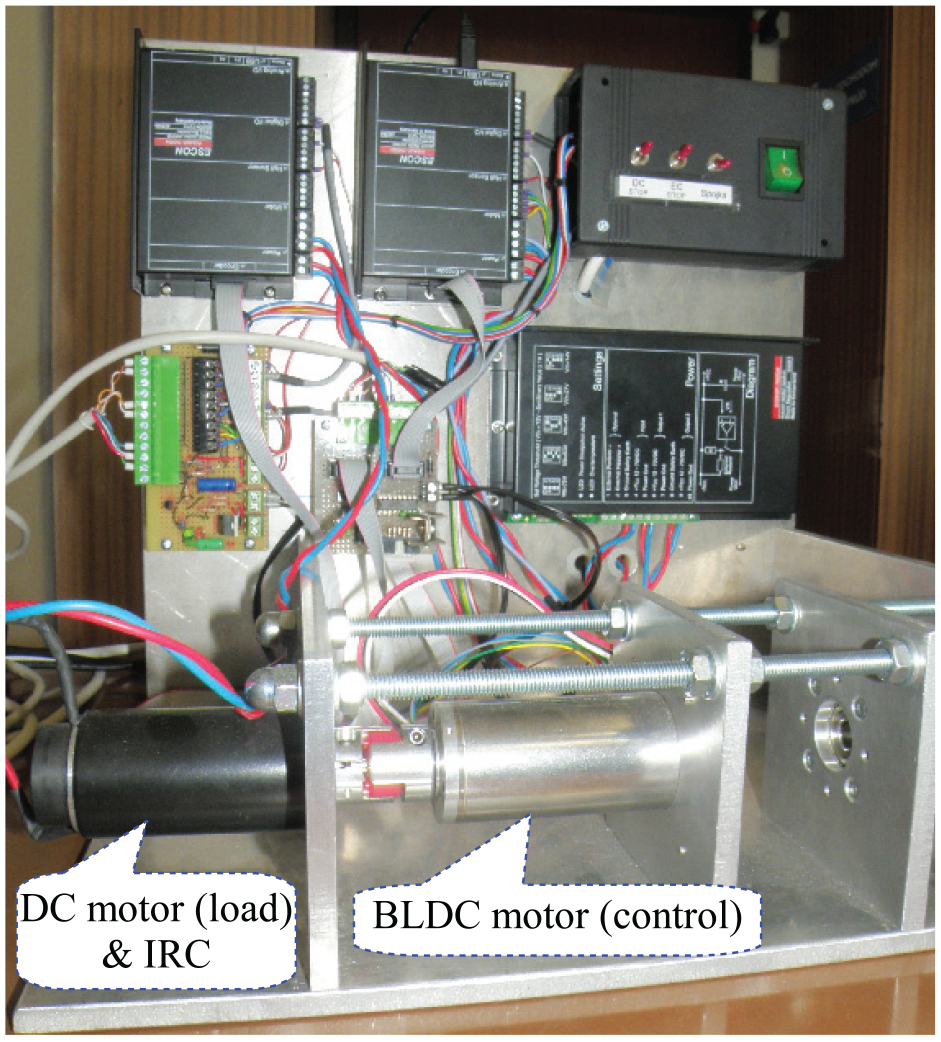
Experimental setup.
All internal delays were approximated by a transport delay
The reference step changes
Experiment design
Yet, before starting real time experiments, we made tests on the simulation model of a position servo drive developed as a new modification of a previous Matlab/Simulink tool. 15 It allows a detailed comparison of all the interesting aspects with real process which brings a useful information about the model. It is available to public in Bélai. 28
The representative experimental results included into this paper may be divided into three parts.
Simplifying DO impact on the plant modeling
In the first step, the plant model (4) is further reduced to the simplest possible form - the double integrator. It introduces a dependence on the working point (13). This is accomplished by an evaluation of the impact of the weighting parameter
Concerning the evaluated controllers, the experiments yield the following conclusions: (1) Due to the DO impact, approximation of the plant dynamics by a delayed double integrator yields performance, which depends just negligibly on the working point (13). Therefore, it is not necessary to use a significantly more sophisticated constrained controller 30 corresponding to the integral plant model (4). (2) The DO-CPID controller based on a double integrator control allows to get nearly ideal shapes of the transients at the plant input and output for arbitrarily large admissible input and output step changes and without any command shaping and trajectory generation. Thus, its use in systems with large input steps (e.g. in autonomous vehicle control) is significantly simpler and more efficient.
Saturation impact on DO-CFPID and DO-FPID controls
Figure 5 confirms the theoretical expectations that the DO-CFPID controller eliminates the output overshooting occurring after larger setpoint steps (
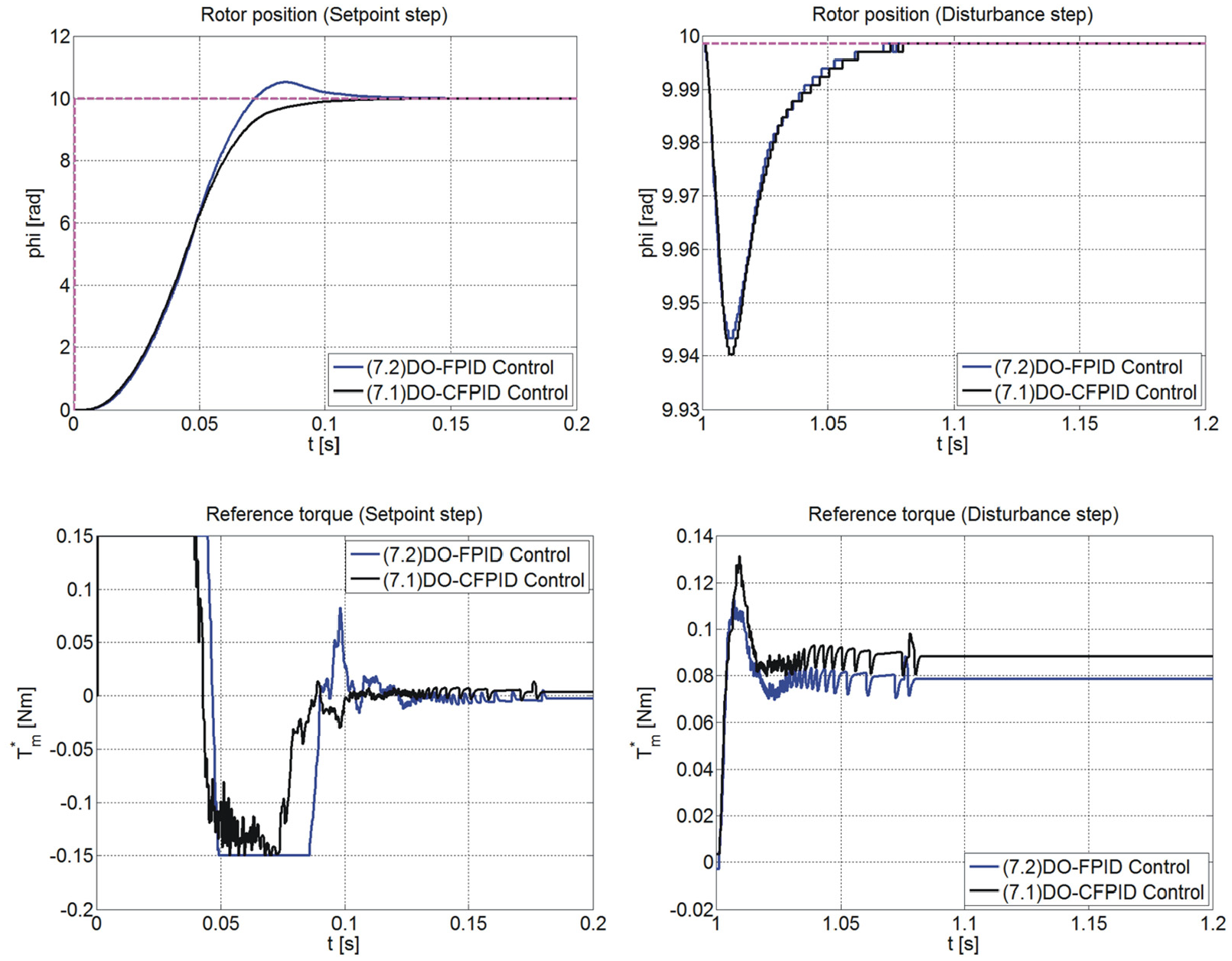
The position transients for the setpoint and disturbance steps with DO based control and Ur,max = 0.15 (
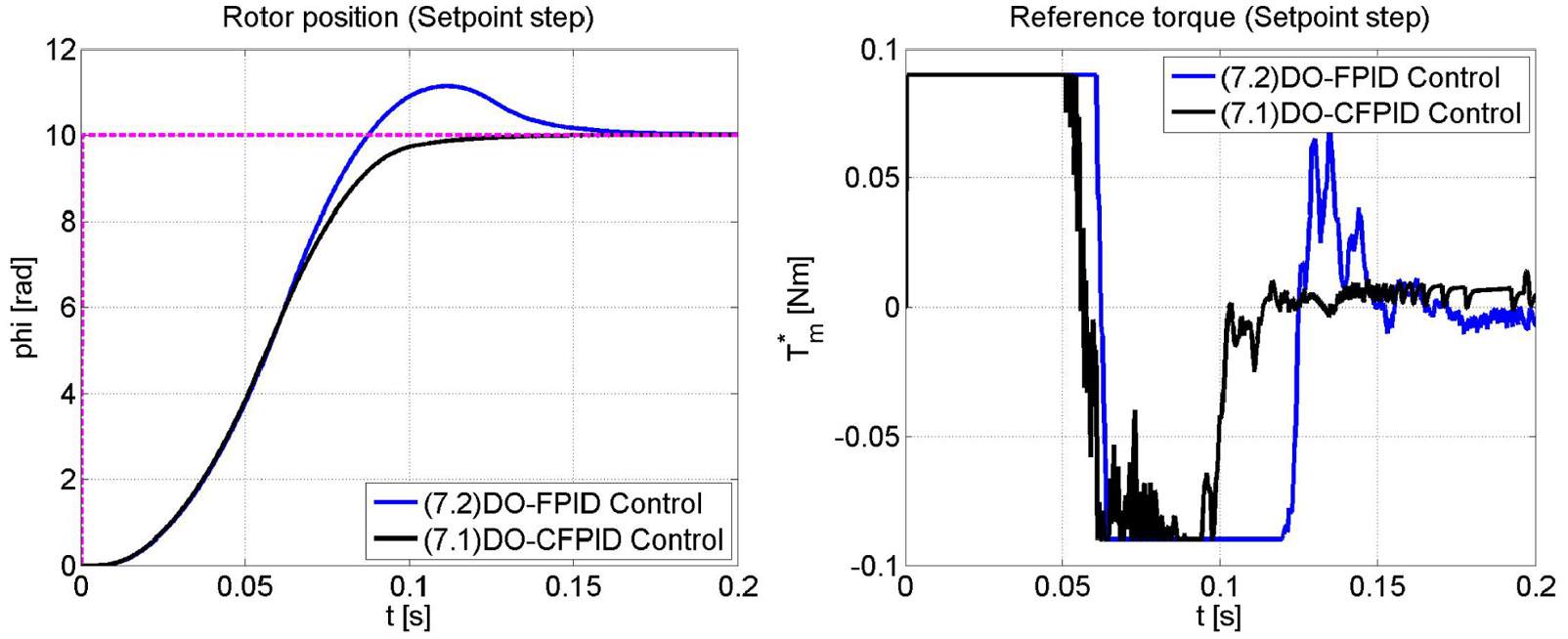
The setpoint steps with DO based control and
Robustness/optimality test: DO-CFPID, DO-FPID,P-PI, and FP-FPI control
The
Performance measures of position servo drives: 1 – P-PI, 4.1 – FP-FPI, 7.2 – DO-FPID, 7.1 – DO-CFPID control (
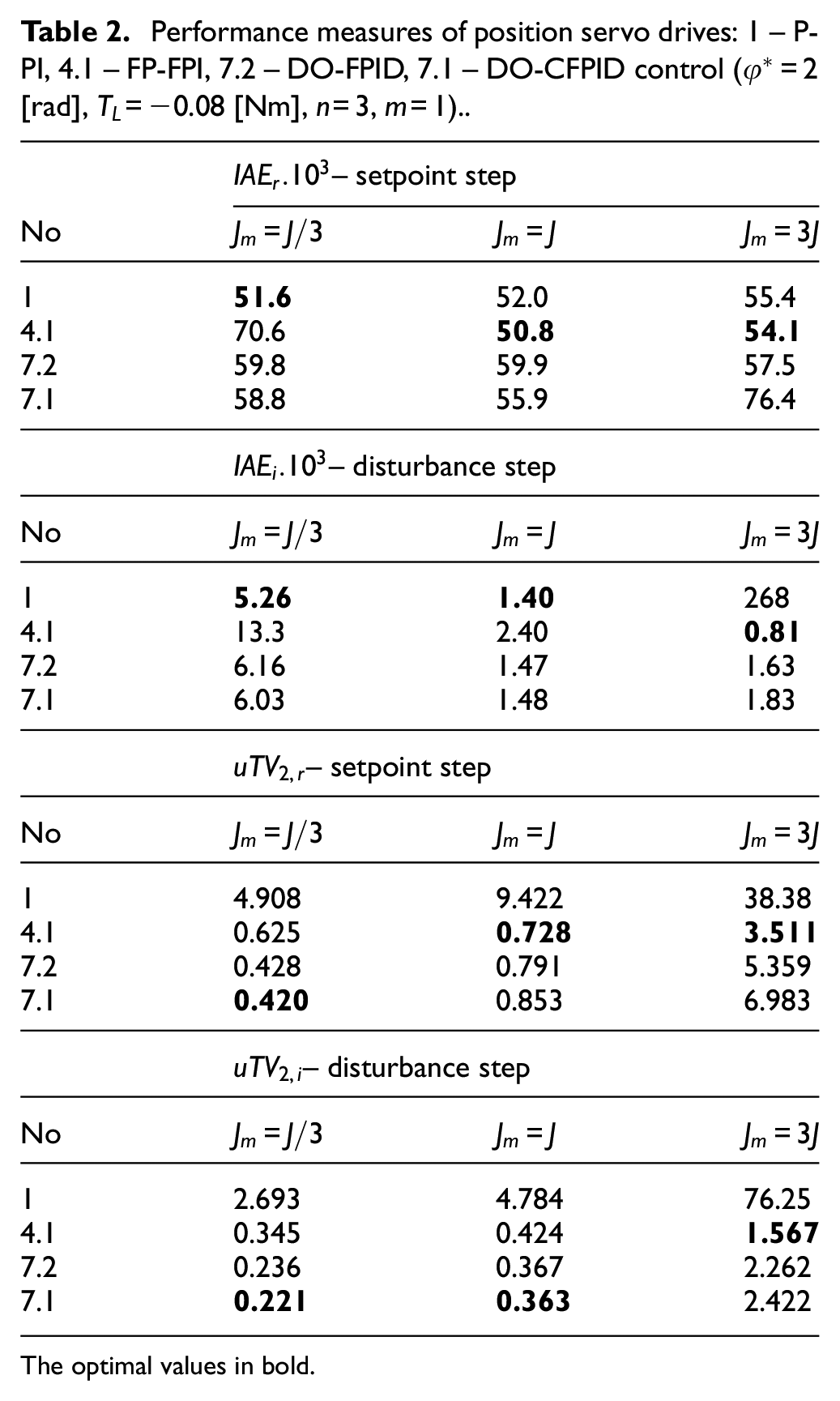
The optimal values in bold.
In order to focus on the robustness in the proportional zone of control, the controllers have been compared at such setpoint change amplitude that causes touching the control constraints without an output overshooting. All three filtered controllers show significantly lower
With exception of
As demonstrated by the output step responses in Figure 7 and the quantified results in Table 2, neither DO can fully eliminate impact of uncertainties and disturbances. It can alleviate it. In the nominal case, its output setpoint step responses are more conservative than the cascaded solutions, but less oscillatory in the perturbed cases. These advantages would stand out significantly more in the constrained case.
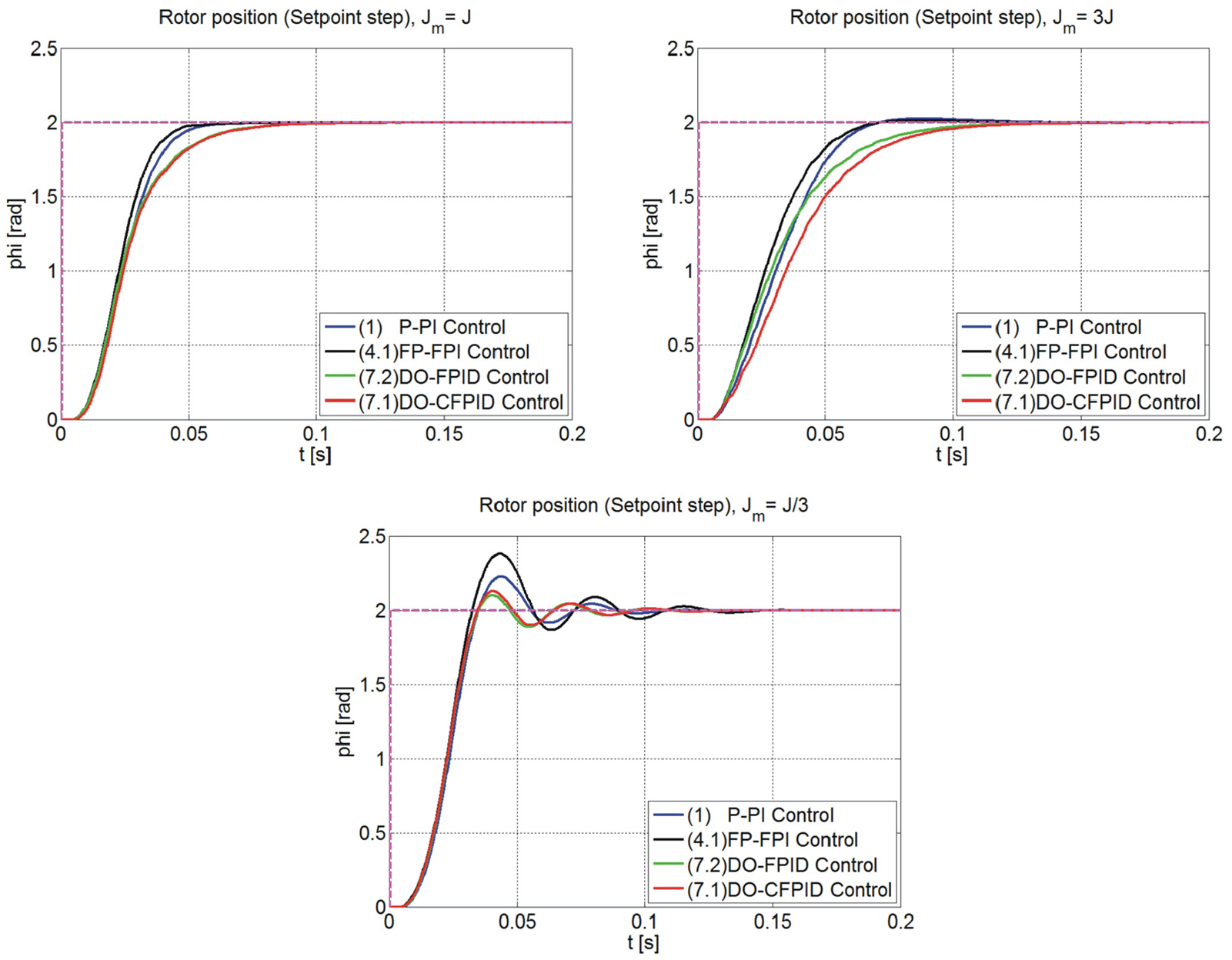
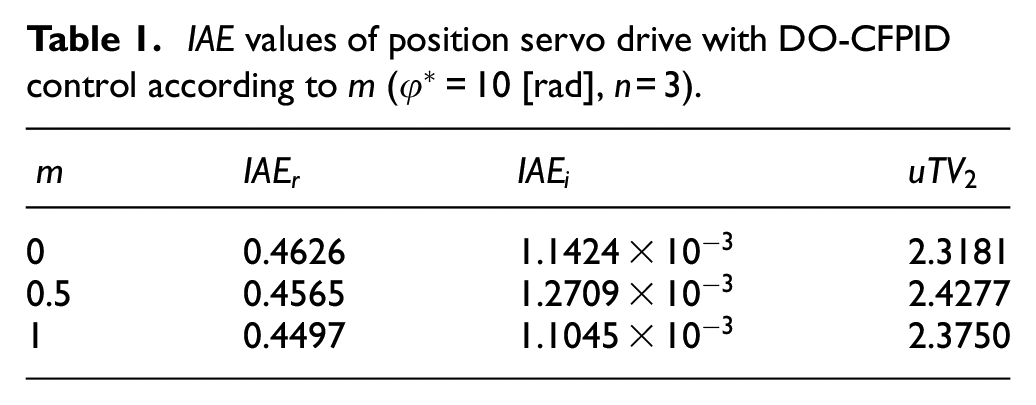
The position transient responses for the setpoint step and different values of
Conclusions and further work
Since in the P-PI control the quantization noise involved in the angular velocity signal is directly transmitted to the controller output, all the tested filtered controllers yield much lower excessive control effort (expressed in terms of
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the grants APVV SK-IL-RD-18-0008 Platoon Modeling and Control for mixed autonomous and conventional vehicles: a laboratory experimental analysis, VEGA 1/0745/19 Control and modeling of mechatronic systems in emobility and P2- 0001 financed by the Slovenian Research Agency.