
Abstract
Long-distance high-pressure oil and gas pipelines are threated by various external forces, such as earthquakes, landslides, and other third-party damages. These additional stresses will cause the pipeline to move and bend, which not only causes the pipeline to undergo a large bending strain, but will also causes the pipeline to fail in severe cases. In-line inspection (ILI) based on strapdown inertial navigation technology has become an effective inspection method for long-distance pipelines in recent years. However, the cups or support wheels of the ILI tool encounter the pipe wall, girth or spiral welds, and other features that lead to minor oscillations and vibration during the inspection. The attitude information computed by the inertial measurement unit (IMU) is affected by these noises, and the computation of pipeline bending strain (PBS) is inaccurate. In this paper, an efficient adaptive combined filtering method based on wavelet transform with Savitzky–Golay (S-G) is proposed, which is adaptable to the variation of attitude information for the ILI tool during a long distance and time inspection. Experiments were conducted to demonstrate the effectiveness of the optimization for PBS. The average relative deviation decreased from 38.3% to 18.3%.
Keywords
Introduction
Oil and gas are the main energy sources for the development of the national economy. To ensure the sustained and rapid development of the national economy, it is necessary to carry out safe, stable, fast, and effective transportation of domestic and imported oil and gas resources. Long-distance buried pipelines have become the most important method of transportation worldwide because of their low cost, high efficiency, environmental protection, and safety. 1 In recent years, the construction of pipelines has continued to increase, and pipeline mileage has also increased rapidly. While bringing economic development to the country and the people, pipeline safety has received increasing attention from society.
Owing to the characteristics of high pressure and long distance, the pipeline may be displaced and deformed by external forces by geologic hazards 2,3 (such as earthquakes, landslides, and permafrost thaw or heave) and other third-party damages. These deformations and displacements cause the pipeline to bear the normal internal pressure loading and bear the bending stress and bending strain. The existence of the PBS seriously affects the structural integrity and operational safety of pipelines; in particular, serious defects with bending strain are more likely to cause failure. Therefore, inspection of the PBS of long-distance pipelines has become the focus point of pipeline operators in recent years, which is significant for preventing accidents and ensuring the safety of pipelines.
The most important method for pipeline defect inspection is pipeline in-line inspection. Compared with external pipeline detection, it has the advantages of low cost, high efficiency, and identifiable. The in-line inspection tool (IIT) uses the transportation medium as the driving force to perform non-destructive inspection of the pipeline for deformation, corrosion, cracks, and so on. It provides a scientific basis for pipeline operation, maintenance, and safety assessments.
Long-distance and high-pressure pipelines are generally used in pipeline IIT, which uses an inertial measurement unit (IMU) based on strapdown inertial navigation technology to map the centerline coordinates and compute the PBS.
4,5
Because the IMU cannot run directly in the oil and gas pipeline, it needs to be sealed and mounted in the IIT. As shown in Figure 1, a combined IIT which designed by Pipechina is presented. The IIT is composed of various vehicles of magnetic flux leakage (MFL), calipers, and IMU. The electronic system is responsible for controlling, collecting, and storing information from various sensors. The odometer is used to measure the distance of the IIT in order to locate the defects and provide speed correction information for the IMU. In addition, it is equipped with the above ground marker (AGM) to collect the coordinates above the ground of the pipeline and provide position correction information for the IMU. Combined in-line inspection tool (Pipechina).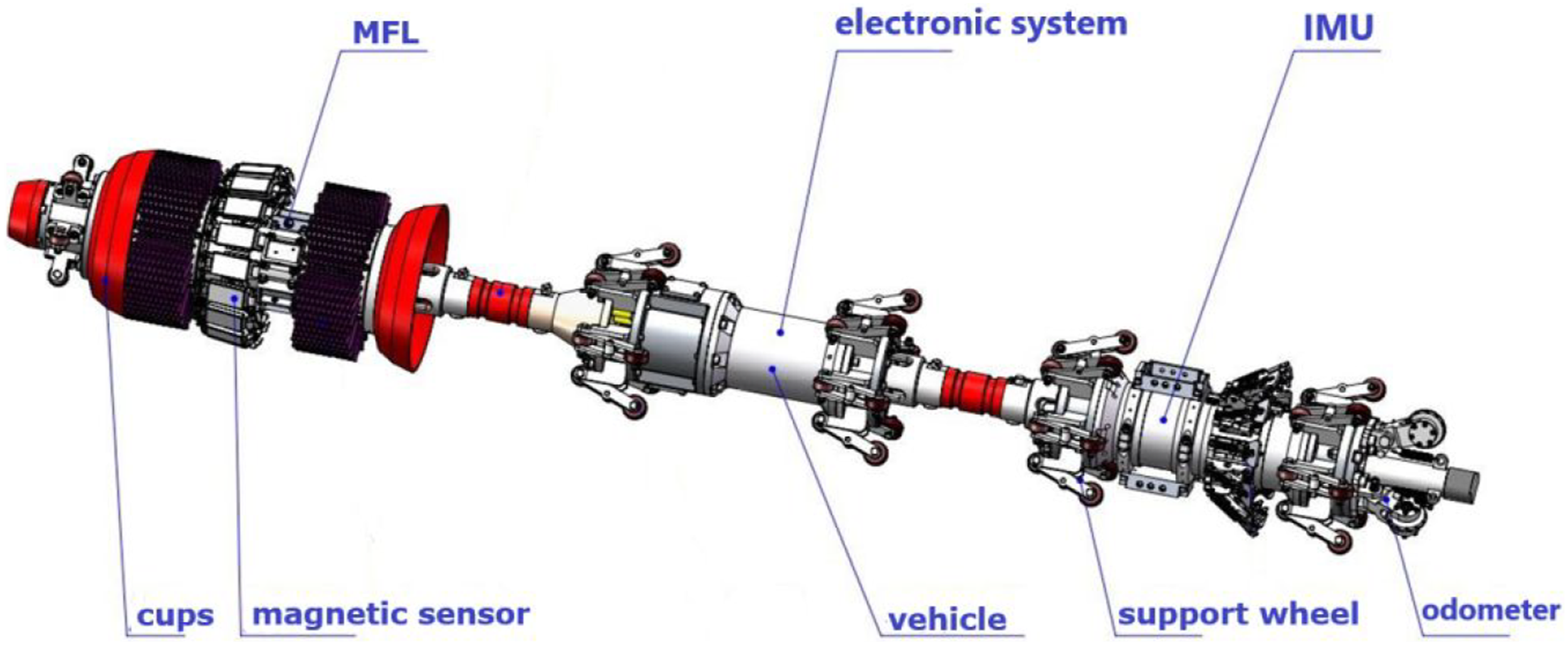
First, the accurate pipeline trajectory is calculated using the combined inertial navigation algorithm. After obtaining the precise coordinates of the entire pipeline, the attitude information (pitch and azimuth) and coordinates of the entire IIT are used to calculate the PBS. 6,7 However, the cups or support wheels of the ILI tool encounter the pipe wall, girth or spiral welds, and other features that lead to minor oscillations and vibration during the inspection. The attitude information computed by the IMU is affected by these noises. Because PBS is commonly calculated using attitude information, in order to enhance the accuracy of PBS, unnoised attitude information is significantly important to research new methods for denoising noise from raw attitude information.
The attitude information should be denoised and filtered first for the external interference of the pipeline features, random noise of the system, and the ILI tool shock. Numerous adaptive filtering methods have been applied in engineering. Wu 8 proposed a method of wavelet analysis and adaptive filtering for fetal ECG extraction, which noise disturbance is eliminated by the algorithm and the extracted waveform is more stable. Zhou 9 proposed a method of wavelet and adaptive Kalman filtering for ESD current waveform, which is denoised by wavelet threshold for stable observation data and optimize the data by the adaptive Kalman filter. Thirumala 10 proposed an improved adaptive filtering for power quality analysis of time-varying waveforms, which estimate the signal frequencies and decompose the nonstationary signal for the analysis of time-varying disturbances. This proposed method is able to analyze the time-varying power quality signals accurately and rapidly. Li 11 proposed a method of adaptive unscented Kalman filter for state estimation for lithium-ion batteries, which estimate not only the state of charge but also lithium-ion concentrations and potentials. This proposed method is able to precisely describe battery internal behaviors to avoid lithium plating. Davari 12 proposed a method of variational bayesian adaptive kalman filter which applied in multirate multi-sensor integrated navigation system. This proposed method estimates measurement noise variances of the sensors adaptively and improves performance of multirate adaptive Kalman filter. Although various adaptive filtering algorithms have been successfully applied, there is still no special method for pipeline bending strain of ILI.
In this paper, an efficient and applicable adaptive combined filtering method based on WT with S-G is proposed for attitude information denoising. Experiments were executed and reported to demonstrate the effectiveness of the optimization for PBS.
Pipeline bending strain calculation
After the pipeline is bent and deformed under the action of an external force, stress concentration can easily occur at the most severely deformed areas of welds and deformation. Once a pipeline with corrosion, mechanical damage, pits, wrinkles, and other defects are superimposed, the overall safety of the pipeline will be compromised. Therefore, obtaining pipeline deformation information in the form of PBS can monitor high-risk areas of the pipeline, which is of great significance for risk and integrity evaluation and excavation repair.
In recent years, pipeline operators have tended to use high-precision IMU IIT to identify and locate pipeline bending deformations. This can provide data support for pipeline integrity evaluation. The first step in calculating the PBS is to accurately survey and map the coordinates of the pipeline using IMU IIT. A large amount of literature has been given a preliminary calculation method for PBS. 13,14
As shown in Figure 2, the pipeline centerline pitch (P) and azimuth (A) can be measured by the IIT and calculated based on the raw angle of pitch ( Pipeline centerline pitch and azimuth.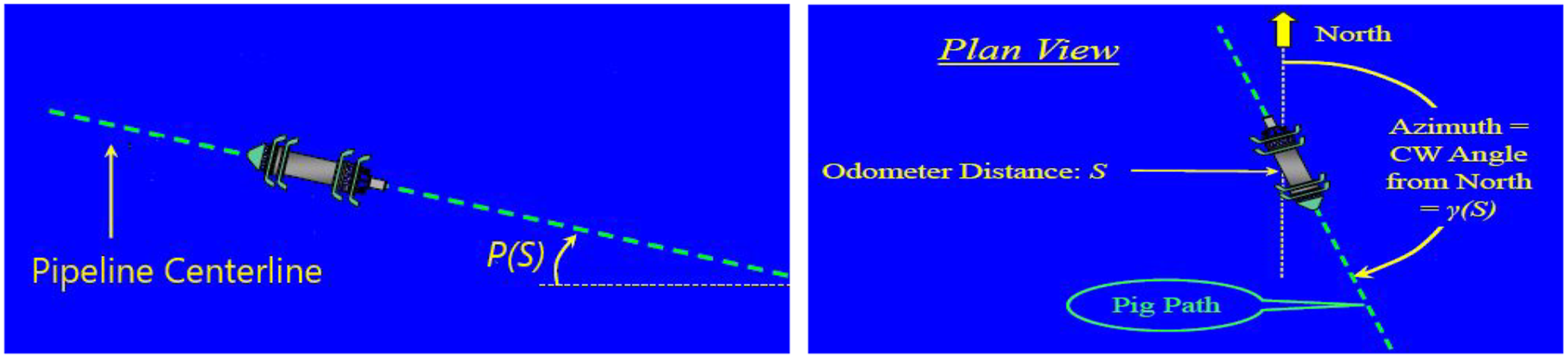


Total PBS

It can be seen from equation (2) that the acquisition of attitude information by the IIT will affect the results of the PBS. In fact, the most serious influence on the calculation of PBS is the data noise caused by the vibration of the IIT. There are many factors that cause the IIT to vibrate, such as the protrusion of the spiral weld on the inner wall, the change in the inner diameter, and the misalignment of the circumferential weld, which causes the pitch angle and heading angle signals to appear as short-wavelength oscillations or local sharp protrusions. These data noises appear in different inspections and represent the false results of the PBS.
Proposed adaptive combined filtering method for pipeline bending strain
The collected attitude information is often mixed with noise and external interference factors, such as minor oscillations and vibration inevitable during the inspection, which will interfere with the pitch and heading angles. This is not conducive to the extraction of real information, resulting in a decrease in the accuracy and precision of the final bending strain calculation results. Therefore, noise reduction preprocessing should be performed on the attitude information first to reduce the interference caused by non-relevant factors and improve the accuracy of the bending strain.
Several filtering methods are commonly used for noise reduction, such as moving average filtering, Savitzky–Golay (S-G) filtering, median filtering, fast Fourier transform (FFT) filtering, and wavelet transform (WT) filtering. The moving average filtering method easily leads to interference distortion of the peak shape of the signal. 15 The median filter can effectively remove the pulse interference, but it is not suitable for fast-changing signals. 16 FFT and WT cannot effectively separate noise frequency components that overlap with the frequency of the useful signal. 17,18 The S-G method uses a smoothed multiple representation to estimate the raw attitude information of the IIT. 19,20 Regardless of the stationarity of the noise, it is very suitable for eliminating all types of noise. However, it lacks adaptability to variations in attitude information for IIT during long-distance and time inspections. Therefore, it is impossible for any filtering method to solve the noise denoised and filtered for IMU IIT alone.
Symlets wavelet transform filtering
Wavelet transform is a signal time-frequency analysis method, which has good positioning characteristics in both the time and frequency domains. The wavelet consists of a series of wavelet basis functions, which can describe the local characteristics of the signal in both the time and frequency domains. The biggest advantage of using WT is that it can perform local analysis on the signal and analyze the signal in any time or space domain. The WT can display high-and low-frequency information of the signal. In the high-frequency part of the signal, the frequency resolution is higher, and the low-frequency part has a higher time resolution. It is adaptable to the signal processed with WT. There are several types of mother wavelets such as “Haar,” “Daubechies,” “Symlets,” and “Biorthogonal.”
The Symlet wavelet proposed by Daubechies can be used for both continuous and discrete wavelet transforms. 21 It is generally simplified to symN (2 ≤N ≤8), which is an improvement of the dbN wavelet system. The Symlet wavelet is a tightly supported wavelet with more perfect symmetry, which is closer to a linear phase filter and has less information loss when processing signals with small discontinuities. This can reduce the phase distortion when the signal is decomposed and reconstructed. When the value of N is larger, the advantage of symN is more obvious.
The Symlets wavelet is assumed as


Although the WT denoising method can effectively remove the white noise in the attitude information, it has no obvious suppression effect on noise such as pulses during the vibration acquisition process of the IIT.
Savitzky–Golay filtering
The S-G filtering method performs a polynomial least-squares fitting on the elements inside the window through a moving window to obtain the smoothed value of the element at the window center.
22
This method not only achieves a good denoising effect, but also retains useful information. As shown in Figure 3, the basic S-G filtering method uses a certain fitting order to perform a least-squares polynomial for a certain continuous The schematic of S-G filter.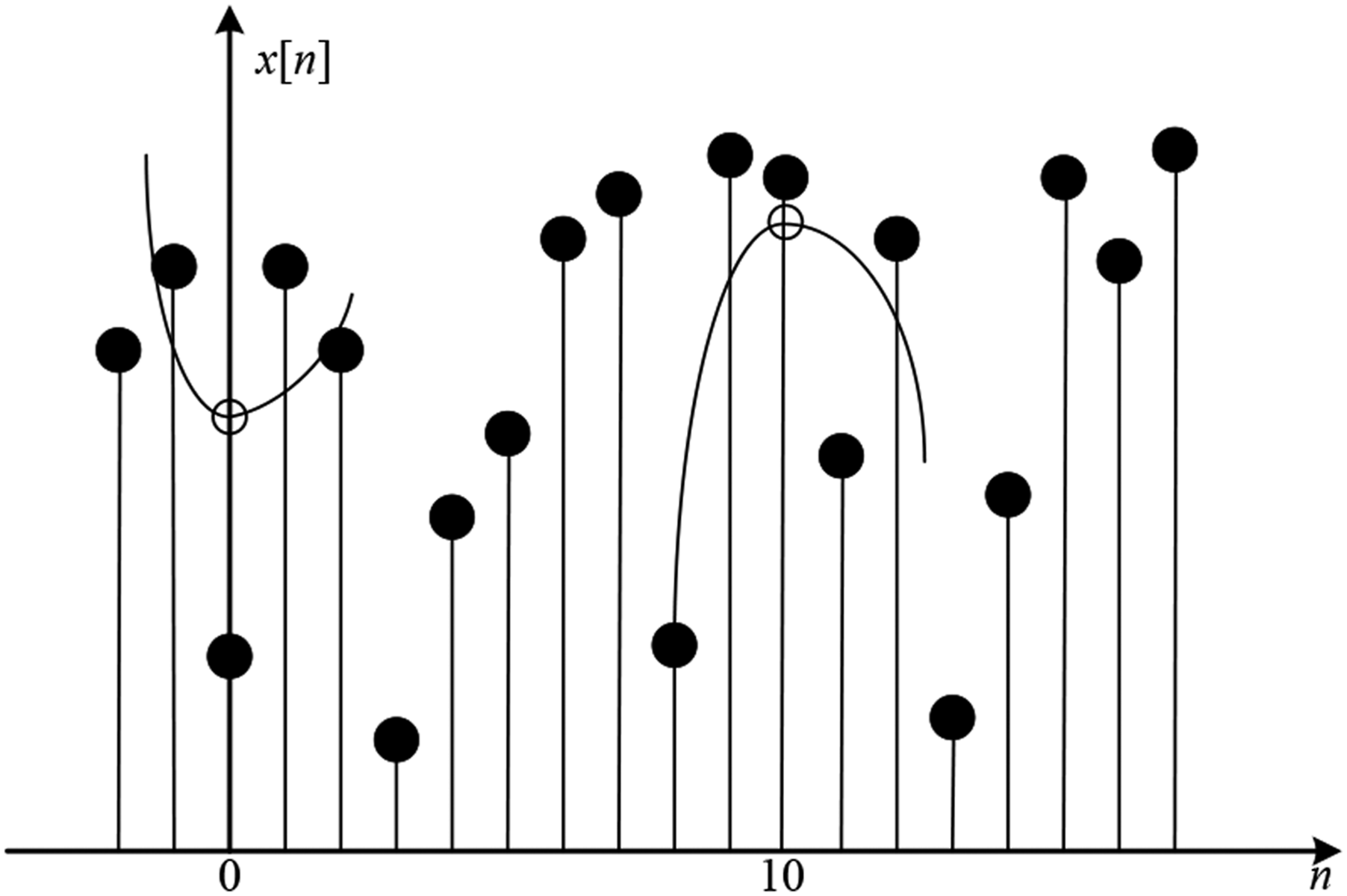
The S-G filtering method is a weighted smoothing filter whose coefficient is determined by two input parameters: fitting order

The minimum mean square error is as follow

Minimize the mean square error to compute the coefficients of the polynomial, such as

The rest may be deduced by analogy, as the window width is translated by 2M +1, the filtered sequence y[n] can be obtained. For the attitude information from the IMU, the correct selection of these two parameters will directly result in different filtering effects. Large low-order windows cause signal distortion and widen the absorption line type at the same time, making it difficult to retain the required information. Although the high-order small window can better retain the signal information, it also has a weaker filtering effect on noise.
An adaptive combined filtering method for pipeline bending strain based on wavelet transform and S-G filtering
Because the attitude information from the IMU can be corrupted by different types of noise such as noise for the external interference of the pipeline features, random noise of the system, and the ILI tool shock, it is essential to select a suitable filtering method to remove the noise. Each filtering method has advantages and disadvantages in signal denoising. Through their filtering characteristics, the noise of the signal can be removed at different stages to achieve better results. For attitude information mixed with multiple noises, a combined filtering method should be proposed based on classic filtering methods.
Therefore, the proposed method called W-SG based on WT and S-G filtering to denoise the attitude information from the IMU and compute PBS is designed, as shown in Figure 4. The first stage uses the WT filter to reduce the effect of high-frequency noise from the system noise and vibrations, and the small impact of the IIT as it passes through the spiral weld. The second stage initializes the order and widow length of the S-G filter. The S-G filter is used to reduce the variation of other noises such as girth weld add to attitude information for the ILI tool during the long distance and time inspection. Then, the denoise attitude information is computed using PBS for the pipeline. If the pipeline undergoes a real bending strain, the range of its bending influence should be large. Features such as girth welds cause local strain changes. Therefore, strain changes caused by girth welds should be filtered and used as the judgment condition for the adaptive filter. Therefore, the order of the S-G filter will be added if the PBS is greater than 0.125% in the range of 3m when obtain the preliminary PBS results. The adaptive S-G filter processes the noise attitude information until the PBS meets the requirements. The flowchart of the proposed W-SG filtering for pipeline bending strain.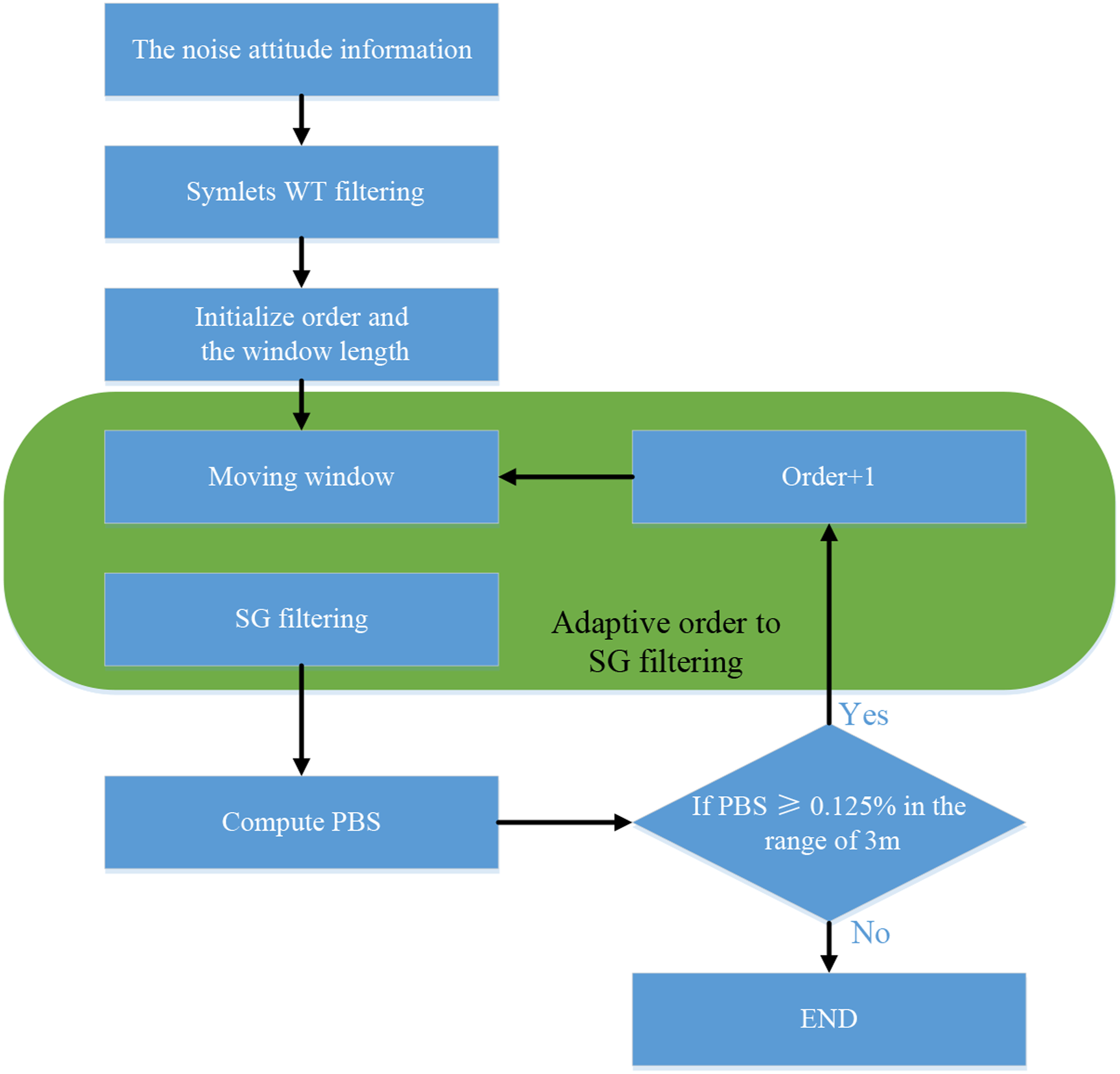
Experimental and verification
Inertial measurement unit Characteristic
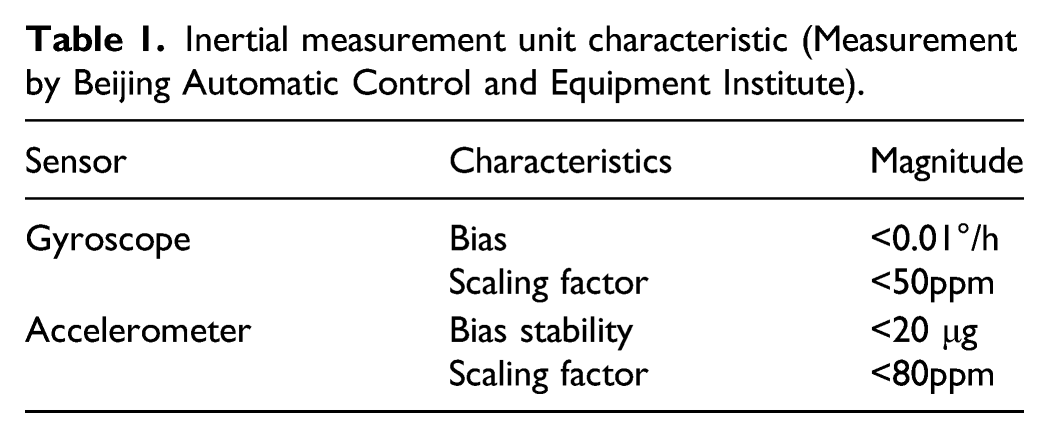
In order to inspect the PBS of long distance pipeline, IMU is the most important sensor device. A typical IMU which designed by Beijing Automatic Control and Equipment Institute is shown in Figure 5. The IMU is mainly composed of three orthogonal laser gyroscopes, three orthogonal accelerometers, power modules, integrated information processing circuits, information processing software, data processing software, and structural components. The gyroscope senses the angular movement of the carrier on the three axes of the carrier coordinate system and measures the angular velocity of the carrier. The accelerometer senses the linear motion of the carrier in the three axes of the carrier coordinate system, and measures the linear acceleration of the carrier in the three axes. The original measurement of accelerometer and gyroscope are used in the multi-sensor data fusion algorithm
24,25
to estimate the position, velocity, and attitude of IIT. Table 1 shows the IMU characteristics. A typical IMU (Beijing Automatic Control and Equipment Institute). Inertial measurement unit characteristic (Measurement by Beijing Automatic Control and Equipment Institute).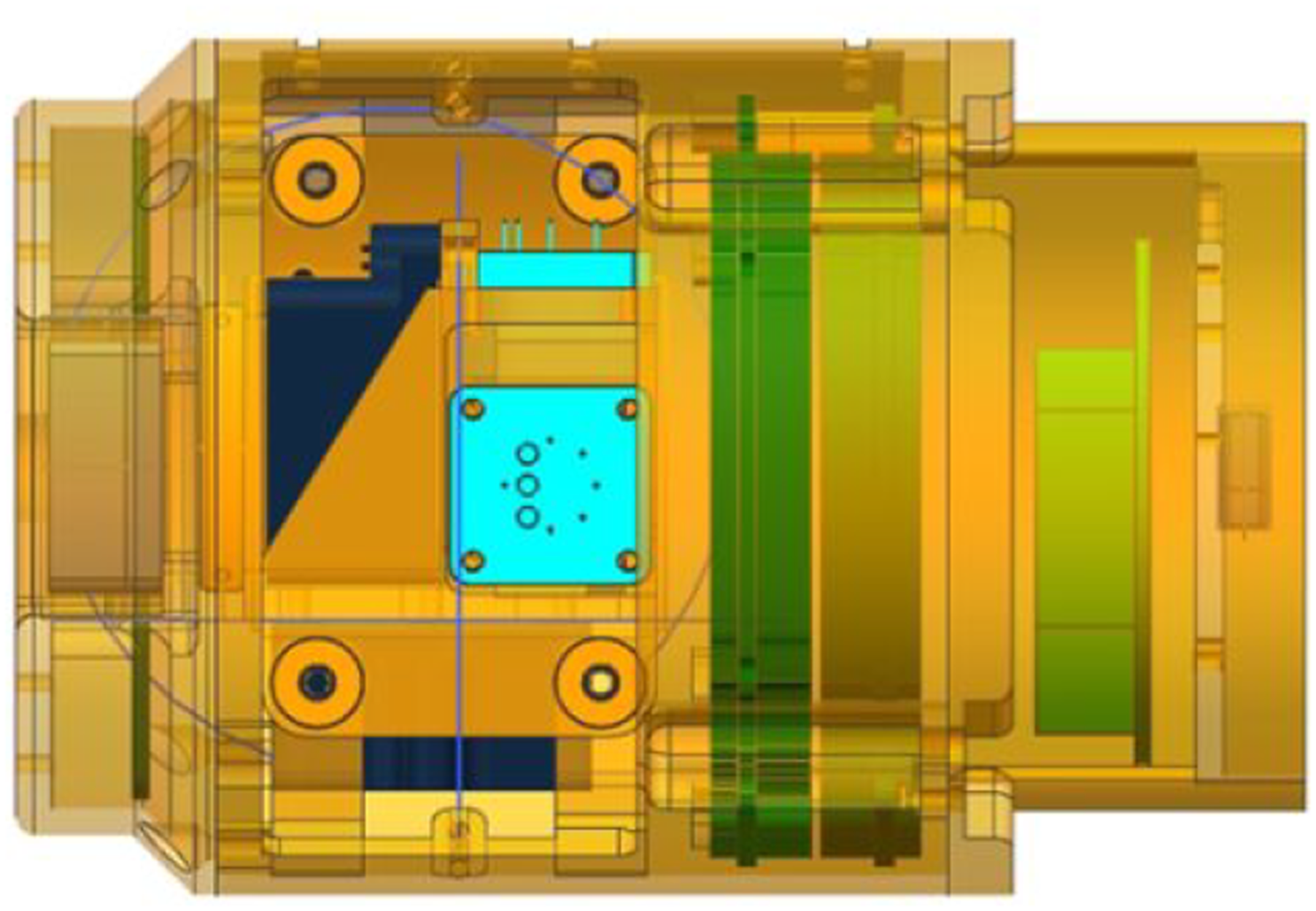
Experimental data processing and analysis
To verify the correctness and accuracy of the proposed method, a multi-run pull-through test (PTT) should be designed. As shown in Figure 6, a combined IIT which manufactured by Pipechina is used to verify the accuracy of the proposed method. Nine pipes of approximately 90 m were installed on the five buttress, and the strain gauges were installed in the center of the pipeline where the strain changed the maximum and was obvious when comparing the PBS for the IIT. The PBS for straight and different pipeline displacements was analyzed. All the pull-though speeds for the tests were 1 m/s. The pull-through test for PBS (Pipechina).
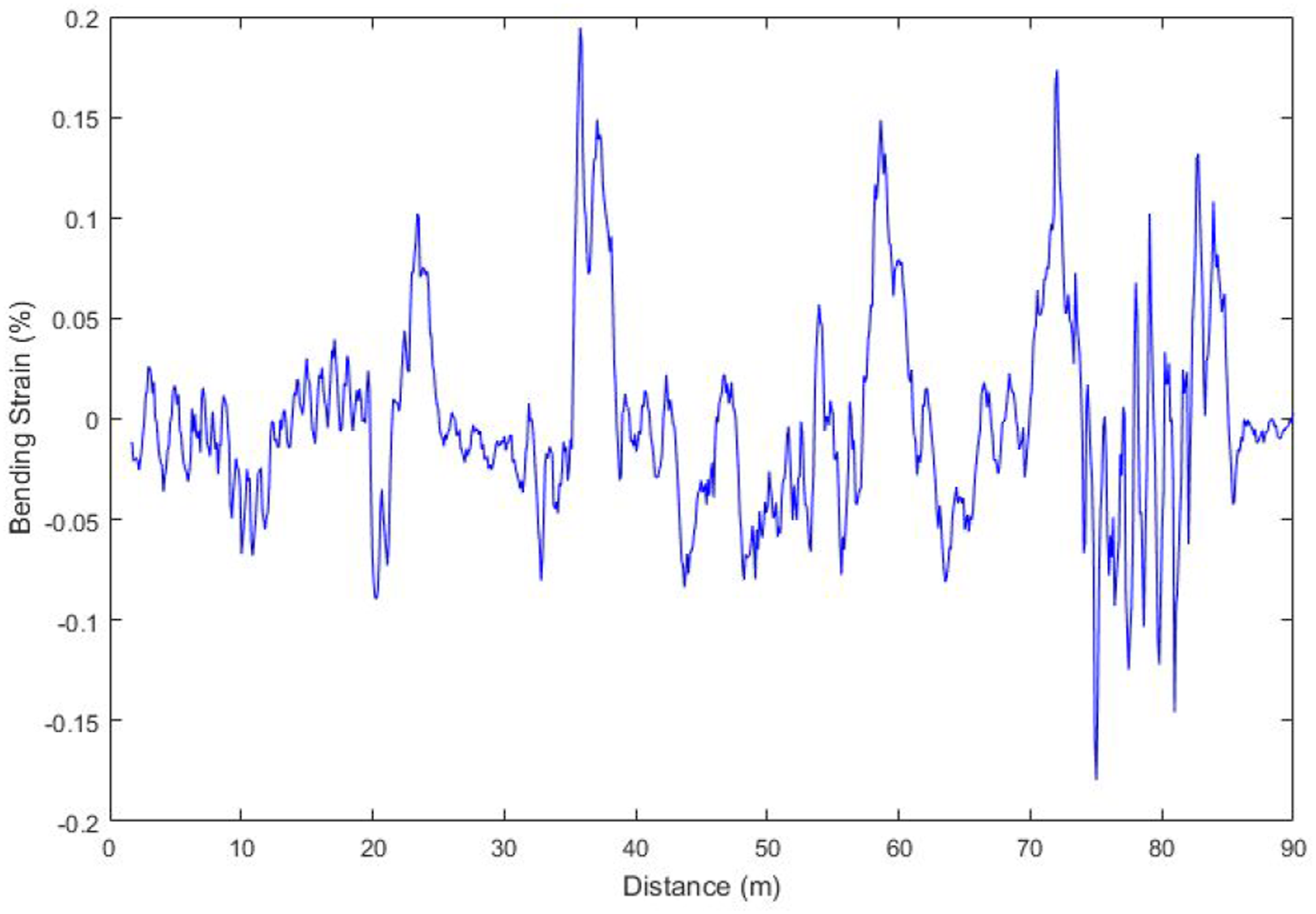
Figures 7 and 8 show the raw attitude of the IIT and PBS when the pipeline is straight. As shown in Figure 7, the IIT is affected by different vibrations, such as girth welds, spiral welds, and other features during PTT. Attitudes such as pitch are interfered with by these noises, and the PBS is also inaccurate, which is computed by attitude. There are three types of noise in the IIT system during the inspection. High-frequency noise signals mainly originate from the internal noise of the IIT system and the vibrations that occur during inspection. The small periodic spike signal is mainly due to the small impact of the IIT as it passes through the spiral weld of the pipeline. There are some large periodic spikes, which are mainly due to the large impact of the IIT passing through the girth weld. Therefore, the attitude information should be denoised using an efficient method. IIT attitude for PTT. PBS with noise for PTT.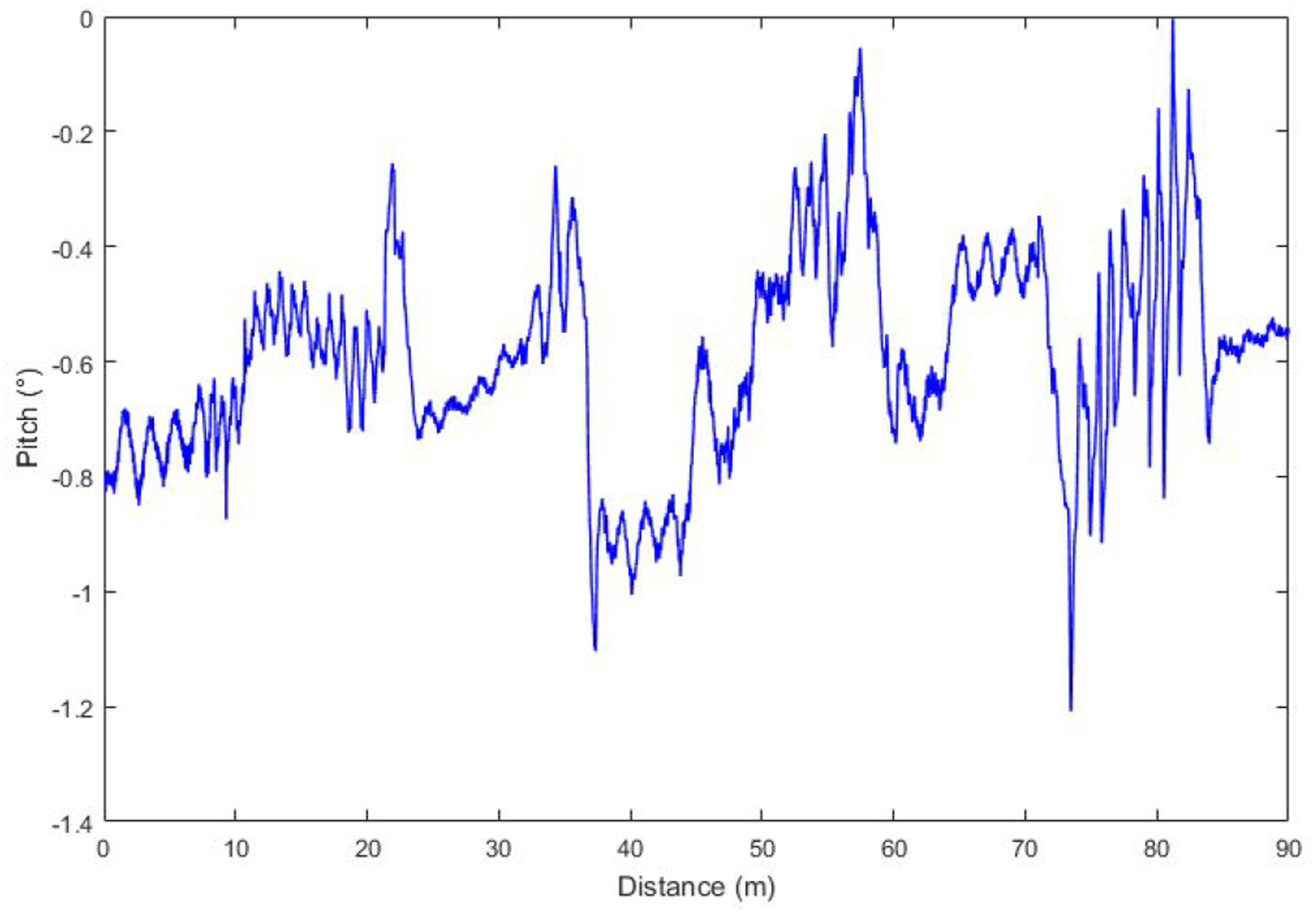
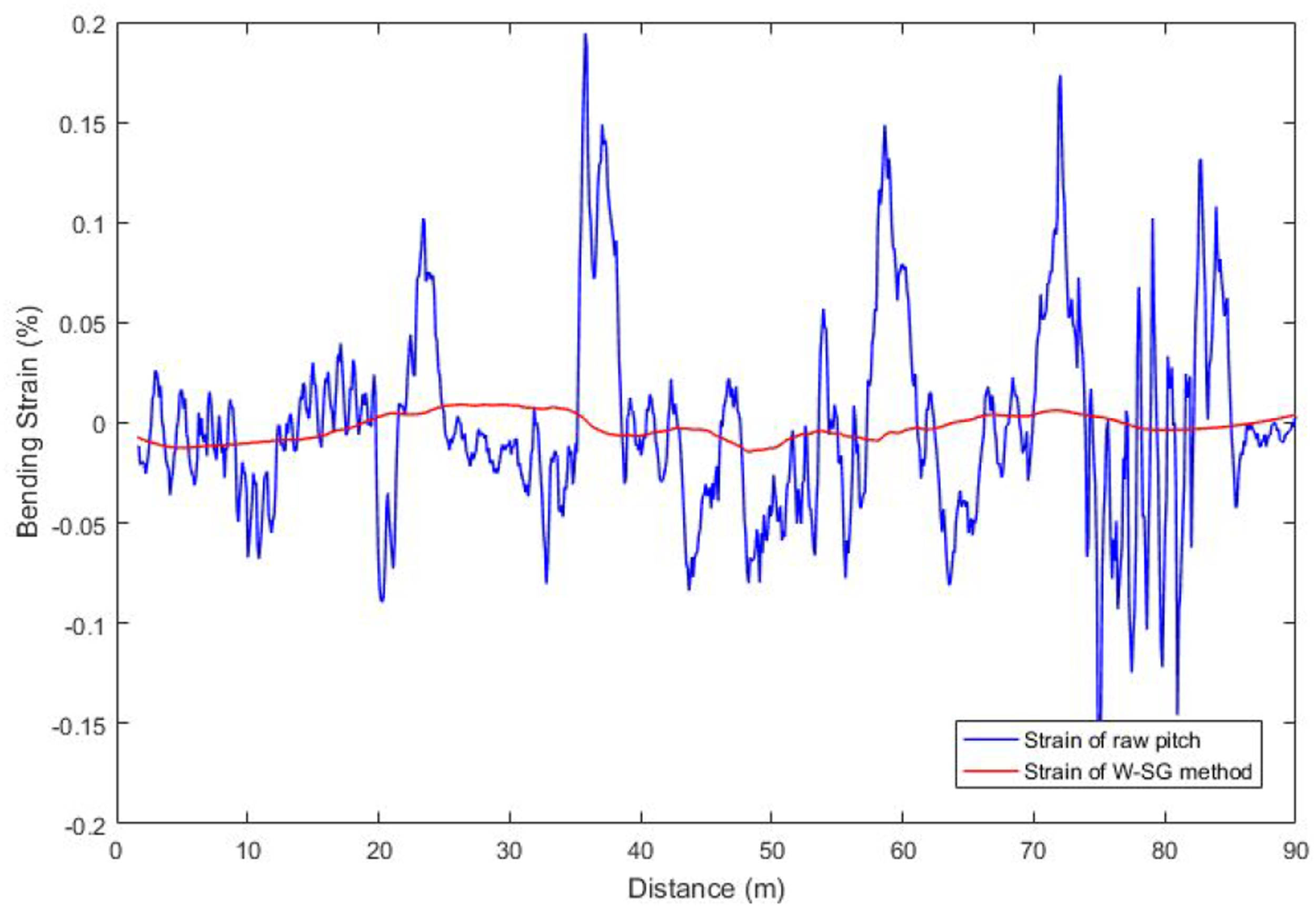
The raw attitude was processed using the proposed method. Figures 9 and 10 show the processed results of attitude and PBS, respectively. This not only eliminates the fixed-frequency noise caused by the vibration and impact of the IIT spiral weld during the inspection, but also the attitude changes due to the impact when the IIT passes the girth weld is reduced. The calculated bending strains before and after filtering are shown in Figure 10. The PBS eliminates the noise caused by the vibration and impact of the pipeline weld, and it is more accurate for the PBS of a straight pipeline. The attitude of the IIT for PTT denoised by W-SG method. The denoised PBS for PTT by W-SG method.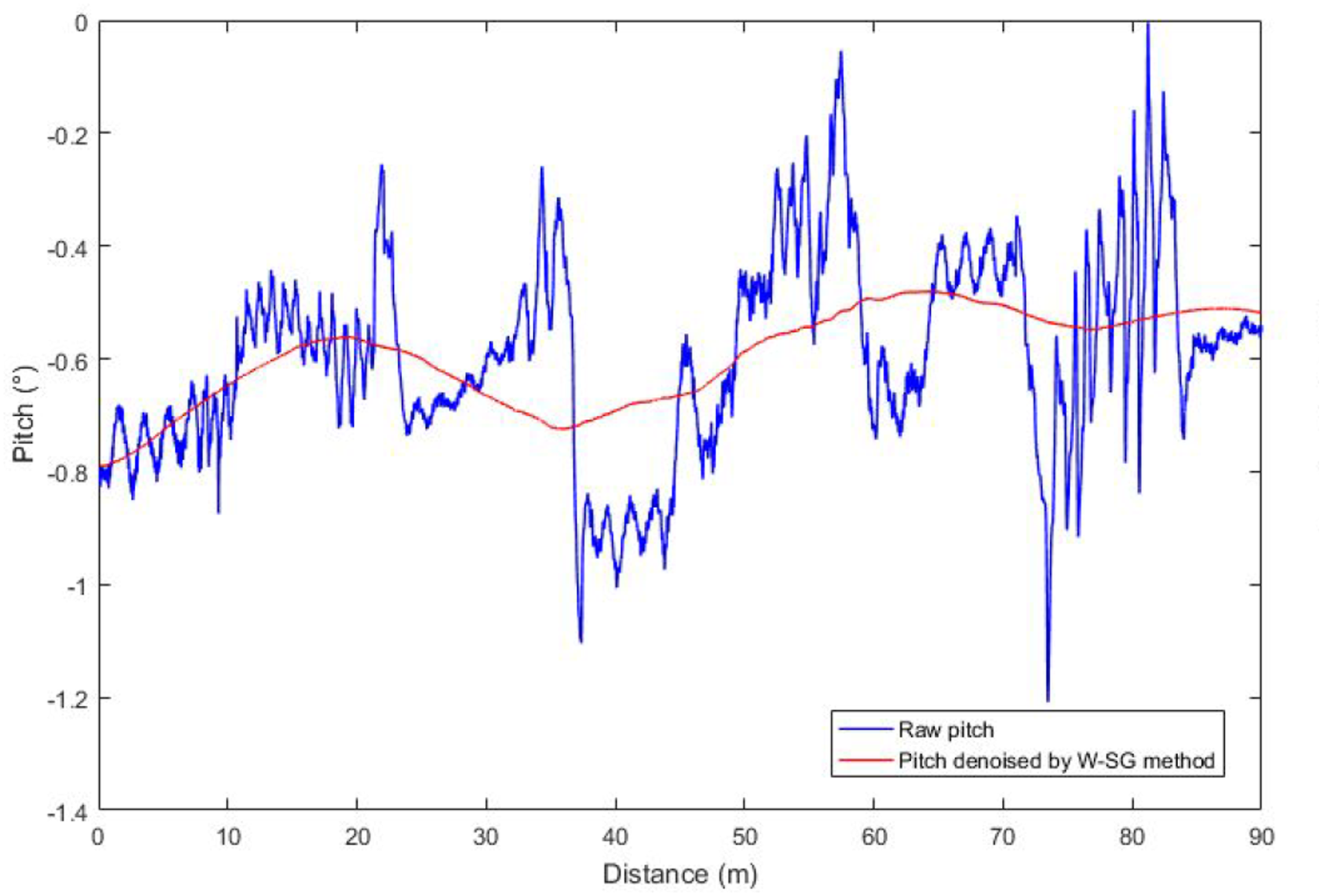
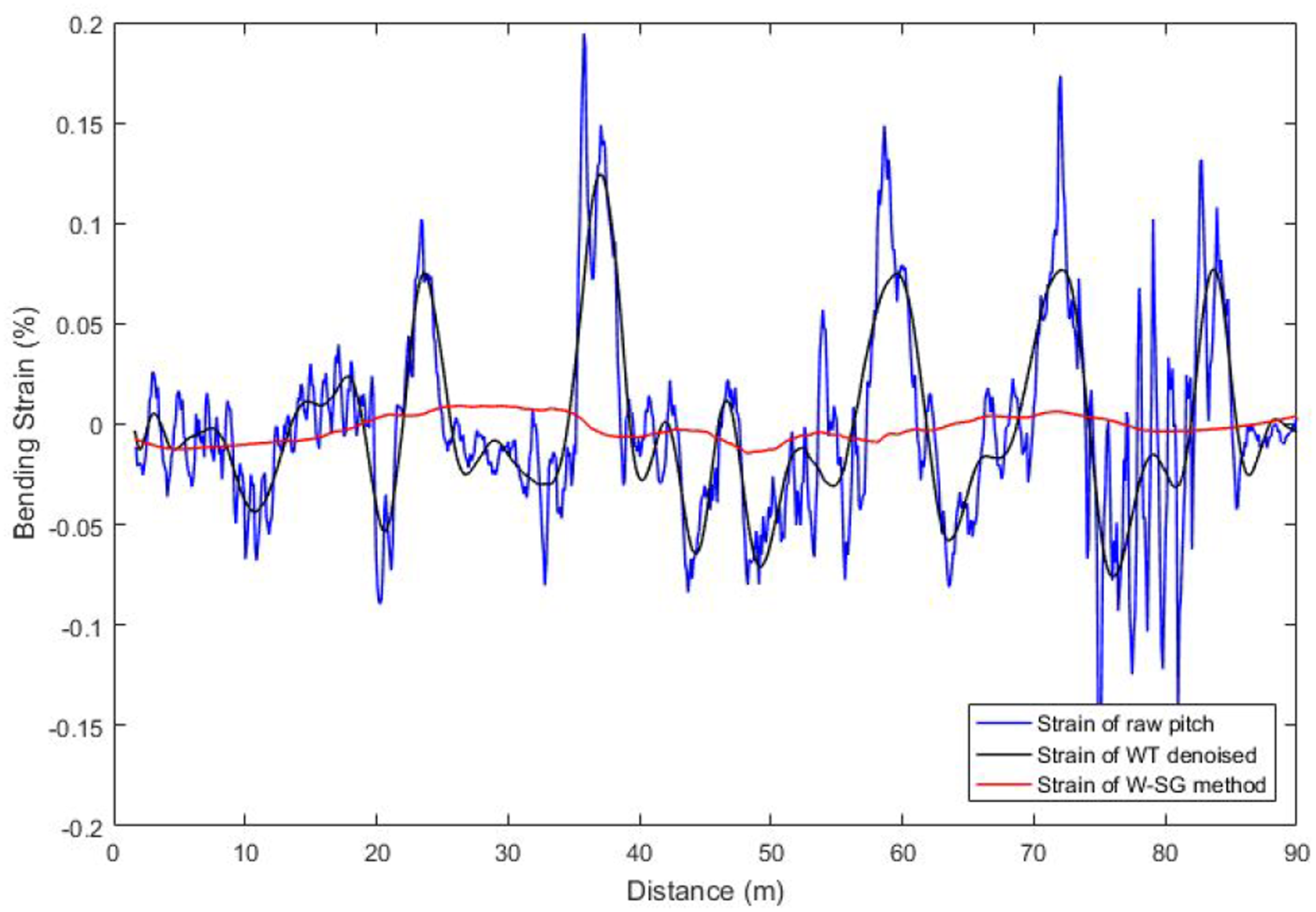
To validate the proposed method, a comparison of the different filtering methods was performed. As shown in Figure 11, the raw attitude information is denoised by the WT and proposed methods. A comparison of the PBS is shown in Figure 12. Comparison of attitude denoised for PTT. Comparison of bending strain for PTT.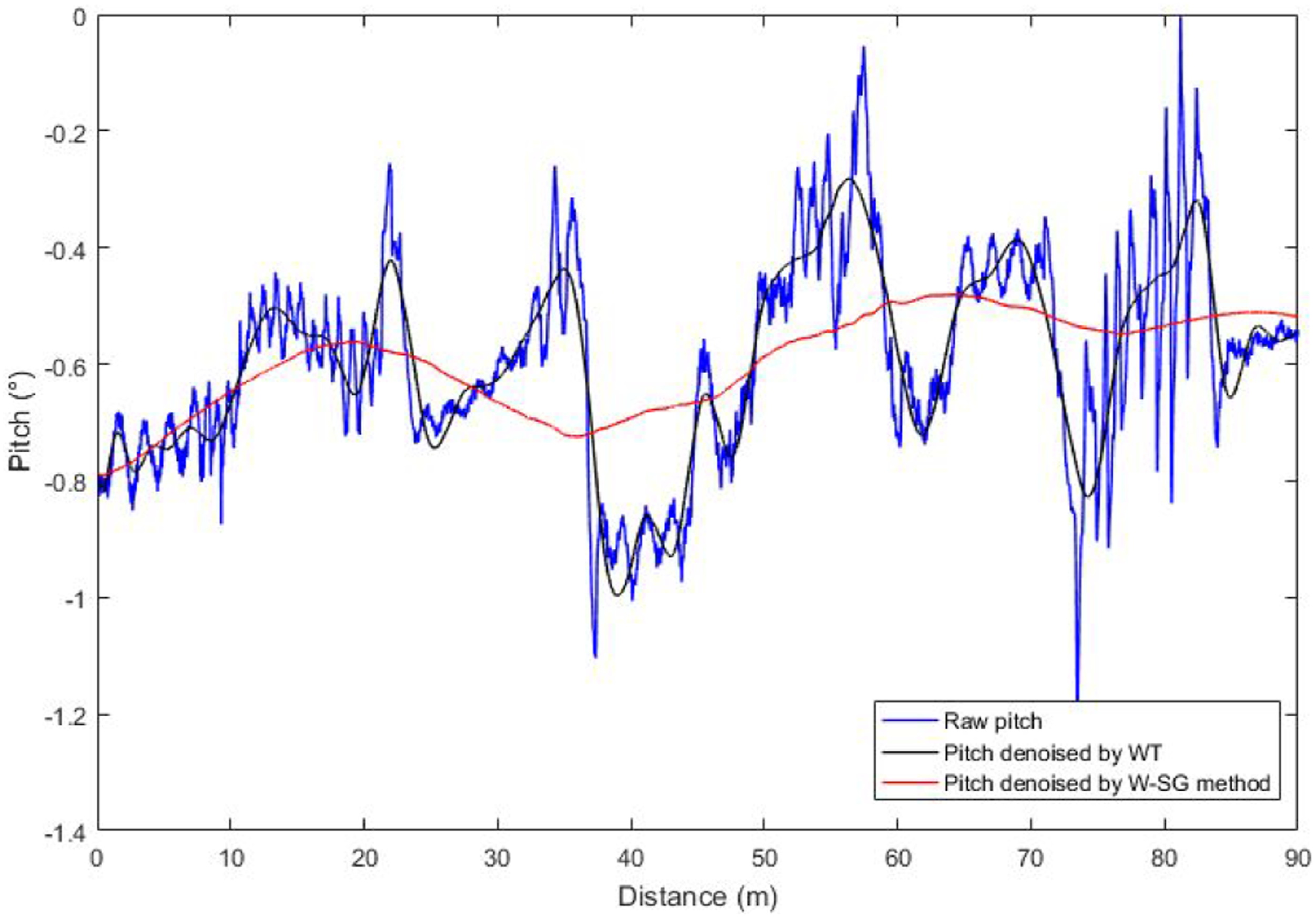
To further verify the accuracy of the proposed method for the measurement of PBS changes caused by the bending deformation of the pipeline, strain gauges were used to compare the IIT results installed at the center of the pull-through pipeline. The pull-through pipeline will be displaced by 5, 10, 15, and 26.5 cm with different loadings to simulate different degrees of bending deformation. These different bending deformations cause different bending strains in the pipeline.
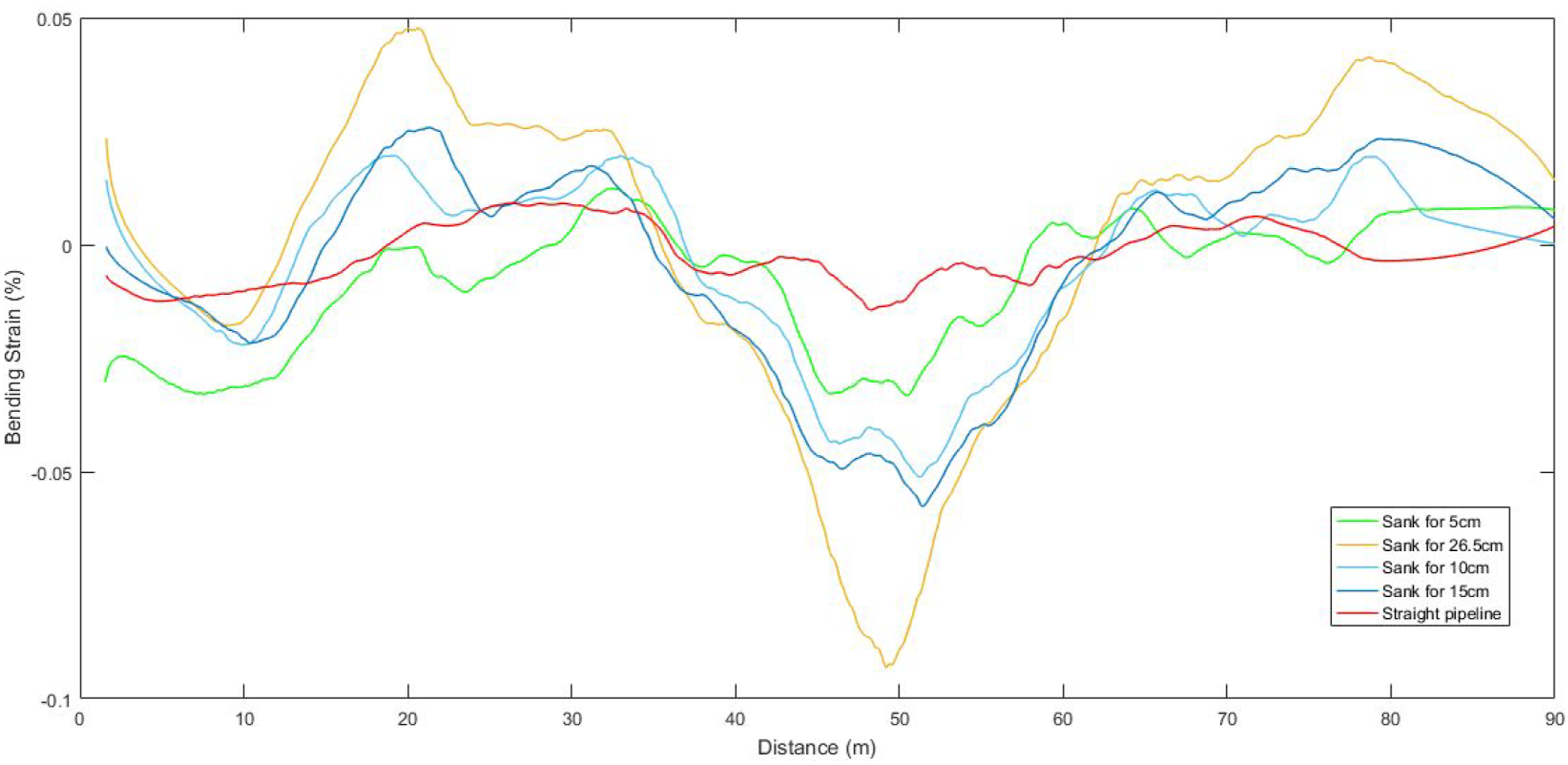
A comparison of PBS for straight and different sank before denoising is shown in Figure 13. Because of the noise, it is difficult to obtain real changes in PBS. The different displacements of the bending strain for the proposed method are shown in Figure 14. It can be clearly seen that the PBS changes correspondingly when the pipeline has different bending deformations. The different displacement of bending strain before denoised. The different displacement of bending strain for proposed method.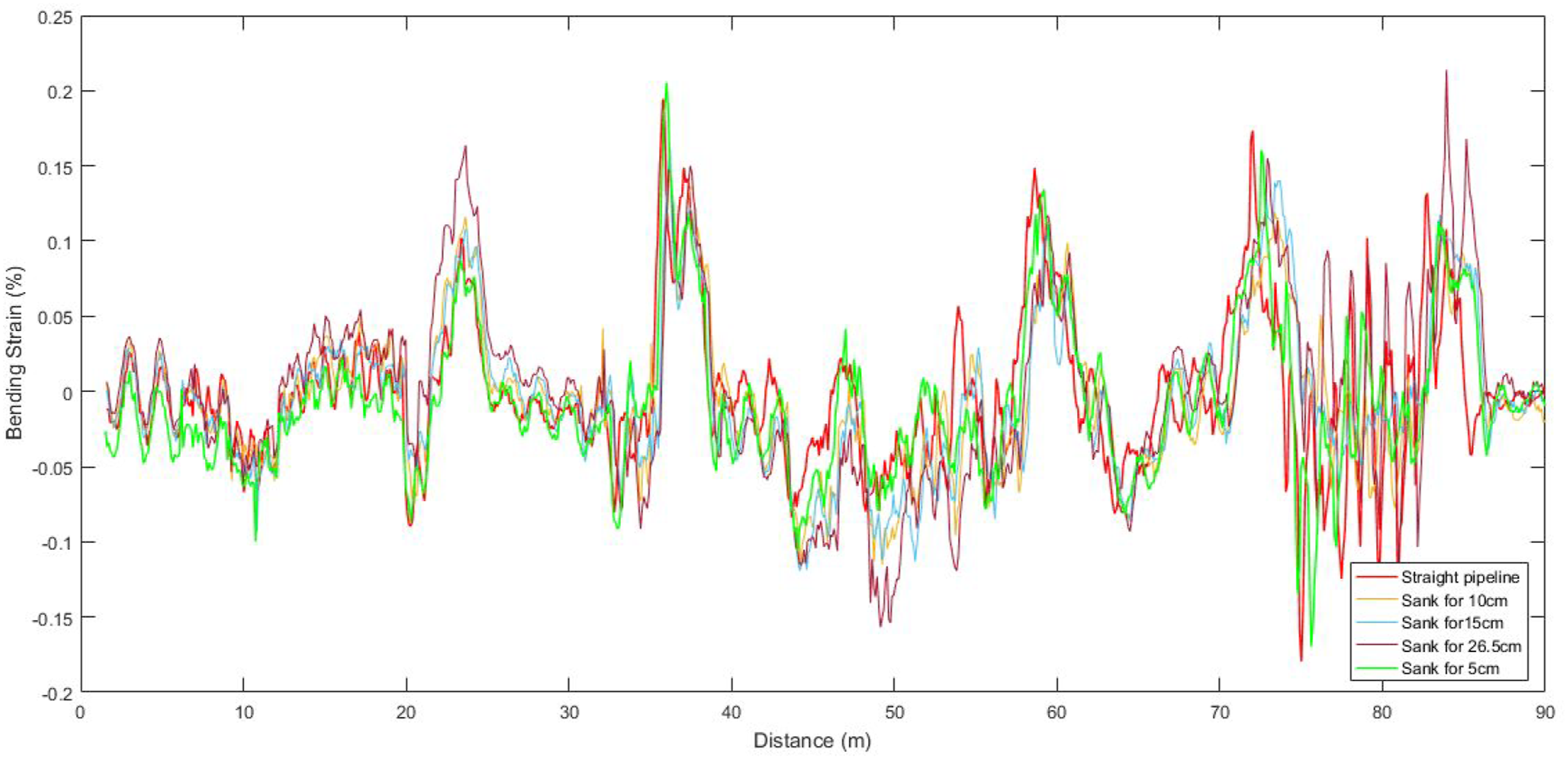
Comparison of pipeline bending strain with different filtering methods.
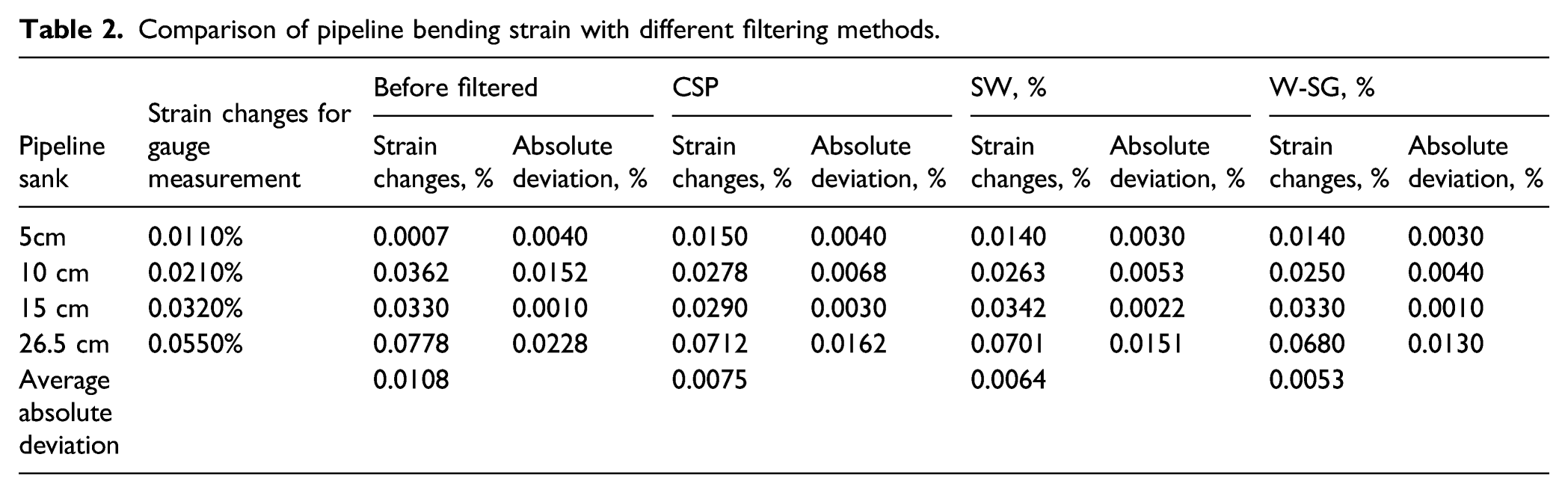
For the pipeline sank 10 cm, the change in the strain gauge was 0.021%. Before the data filtered, the calculation of strain changes for PBS is 0.0362%, and the absolute deviation is 0.0152%. When the three filtering methods are used, the calculations of strain changes for PBS are 0.0278%, 0.0263%, and 0.025%. The absolute deviations are 0.0068%, 0.0053%, and 0.004%, respectively.
For the pipeline sank 15 cm, the change in the strain gauge was 0.032%. Before the data filtered, the calculation of strain changes for PBS is 0.033%, and the absolute deviation is 0.001%. When the three filtering methods are used, the calculations of strain changes for PBS are 0.029%, 0.0342%, and 0.033%. The absolute deviations are 0.003%, 0.0022%, and 0.001%, respectively.
For the pipeline sank 26.5 cm, the change in the strain gauge was 0.055%. Before the data filtered, the calculation of strain changes for PBS is 0.0778%, and the absolute deviation is 0.0228%. When the three filtering methods are used, the calculations of strain changes for PBS are 0.0712%, 0.0701%, and 0.068%. The absolute deviations are 0.0162%, 0.0151%, and 0.013%, respectively.
The comparison for absolute deviation of PBS with different filtering method is shown in Figure 15. The average absolute deviation before data filtered is 0.0108%. When the three filtering methods are used, the average absolute deviation for PBS are 0.0075%, 0.0064%, and 0.0053%, and the average relative deviation are 26.9%, 21.7% and 18.2%, respectively. It is obvious that the proposed W-SG method has a better performance and is more accurate for the PBS. From the pull-through tests and results, the method proposed in this paper can achieve a better performance for the computation of PBS. The comparison for absolute deviation of PBS with different filtering method.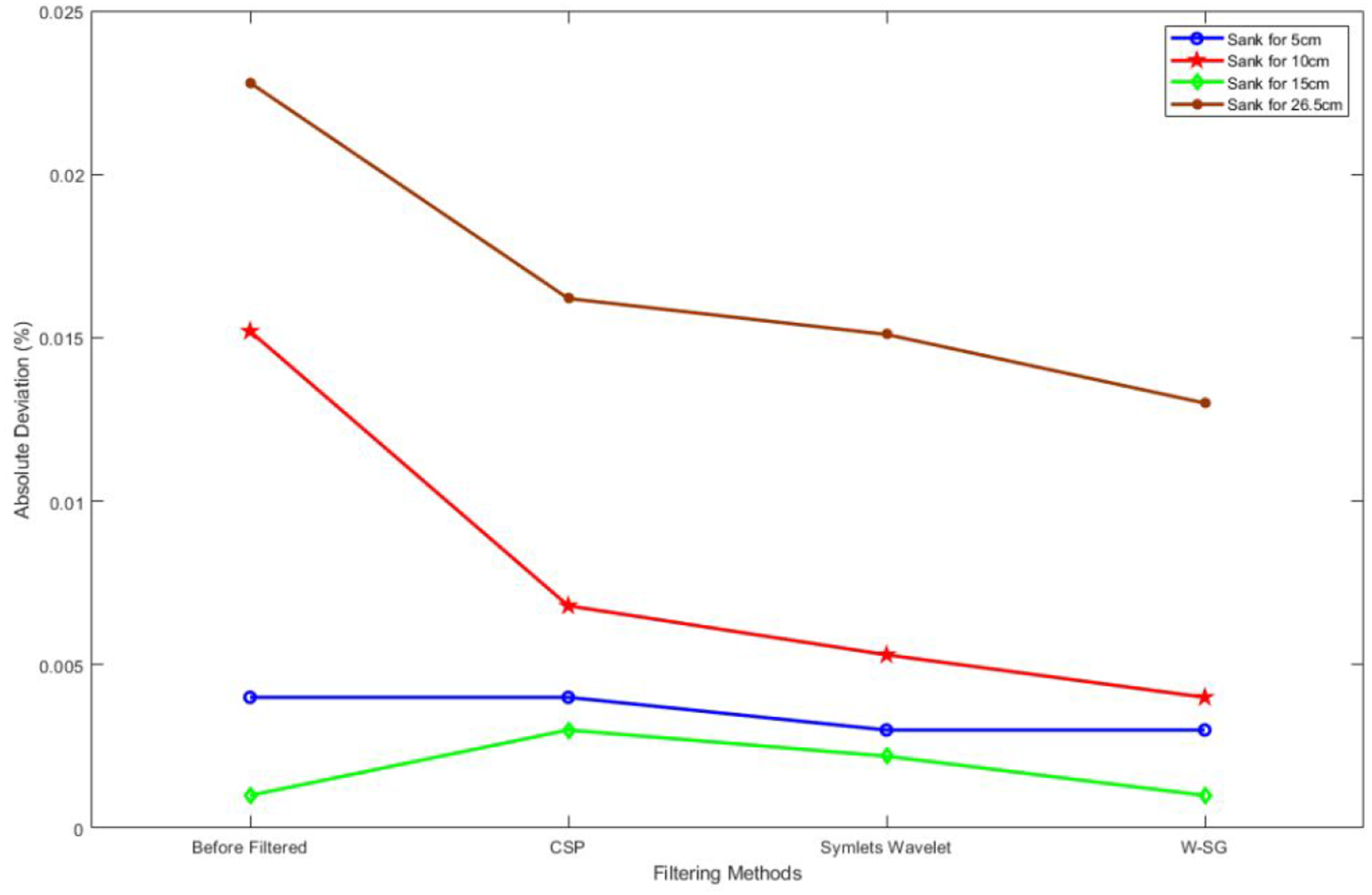
Conclusion
Oil and gas pipelines in geological disaster areas are susceptible to bending deformation and displacement due to external forces. These external forces cause large stresses and strains in the pipeline and cause serious damage to the pipeline in severe cases. In order to be able to inspect the stress status of the pipeline, the use of IMU in-line inspection technology has become a routine practice for current pipeline operators. However, the cups or support wheels of the ILI tool encounter the pipeline wall, girth or spiral welds, and other features that lead to minor oscillations and vibration during the inspection. The IIT attitude information is not accreted by these disturbances, which leads to inaccurate calculation of the PBS. In order to improve the accuracy of PBS calculation, this paper presented an efficient method as follow: 1. The method for calculating the PBS is presented, and various factors that cause the inspection inaccuracy are analyzed. 2. An efficient adaptive combined filtering (W-SG) method based on WT with Savitzky–Golay is proposed, which is adaptable to variations in attitude information for inspection. The proposed method not only eliminates the fixed-frequency noise caused by the vibration and impact of the IIT spiral weld during the inspection, but also the attitude changes due to the impact when the IIT passes the girth weld is reduced. 3. The accuracy of the proposed method was verified through multiple runs and different displacements of PTT, the average absolute deviation of PBS was decreased from 0.0108% to 0.0053%, and the average relative deviation was decreased from 38.3% to 18.3%.
Footnotes
Declaration of conflicting interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (2016YFC0802100).