
Abstract
Polygonalization of the wheel describes the growth of out-of-round profiles of the wheels of railway vehicle. This problem was identified in the 1980s but its mechanism is still not well understood. The wheel-rail disturbance formed by wheel polygonalization will accelerate the fatigue fracture of the key parts of rail vehicles and seriously threaten the safety of rail vehicle. This fact has led to significant efforts in detecting and diagnosing wheel polygonalization, in particular in setting the criteria for health monitoring. Currently, the time-domain feature parameters extraction method based on data statistics and frequency-domain feature parameters extraction method based on spectrum estimation are widely applied to detect wheel polygonalization. However, the basis of spectral estimation is the Fourier transform, which is not good at dealing with non-linear vibration systems (such as vehicle-track coupled system). Aiming at the wheel polygonalization problem existing in high-speed train, the non-linear extent of vibration response of vehicle system caused by wheel polygonalization is analyzed based on vehicle-track coupled dynamics and adaptive data analysis method. A typical high-speed train model is established according to the vehicle-track coupled dynamics theory. The wheel polygonalization model is introduced and vehicle system vibration response is calculated by numerical integration. The vibration response signal is decomposed by empirical mode decomposition (EMD) to produce the intrinsic mode functions (IMFs). By calculating the intra-wave frequency modulation of IMFs, that is, the difference between instantaneous and mean frequencies and amplitudes, the non-linearity of the dynamic response is quantified. Influences of wheel polygonalization on the non-linearity of steady-state and unsteady vibration responses of vehicle system are analyzed in detail. An objective criterion for wheel polygonalization health monitoring based on Degree of Non-linearity is proposed, which provides an effective tool for prognostics and health management of trains.
Keywords
Introduction
As one of the most important parts of railway vehicle, the wheel ensures the running and guiding of the train by connecting the train to the track. It carries the load of the vehicle and applied it to the track. During the service life of the train, the wheel wear is inevitable and predictable, and the wheel is no longer completely round, resulting in unwanted wheel irregularity excitation. Among wheel irregularities, wheel polygonalization is a common kind of wheel out-of-roundnesss. It is the non-uniform wear in the circumferential direction of the wheel: the radius of the wheel varies periodically along the circumference, and the polygonalization extends to the whole circumferential surface at a certain wavelength.
Kaper 1 first found the phenomenon of wheel polygonalization on the Dutch railway, and later on the ICE high-speed train in Germany and the Stockholm subway in Sweden. Wheel polygonization of rail vehicle will lead to significant changes of wheel-rail vertical force, lateral force, derailment coefficient, wheel weight reduction rate, and other indexes, which will greatly affect the stability and curve passing performance of the vehicle. Nielsen and Johansson2,3 discussed the state-of-the-art in research on experimental detection of wheel/rail impact loads, mathematical models to predict the development and consequences of out-of-round wheels, criteria for removal of out-of-round wheels and suggestions on how to reduce the development of out-of-round wheels. Barks and Chiu 4 gave a review of the effects of out-of-round wheels on track and vehicle components. One of the most dangerous situations that may be caused by wheel out-of-roundness is hunting instability, which can greatly increase wheel-rail forces, accelerate wheel-rail wear, and produce harmful noise. The effect of wheel ovalization on the stability of high-speed trains have been discussed by Zhang et al. 5 The results show that the hunting motion of the wheelset caused by the wheel ovalization has a great relationship with the combinations of the wheel ovalization extent, the vehicle speed, and the phase angle.
In recent years, the wheel polygonalization problem has been frequently encountered by China’s high-speed trains, causing high-frequency vibrations and wheel-rail impacts. The field test results show that the vibration acceleration of the wheelset reaches 300 g and the vertical and transverse vibration accelerations of the gearbox exceeds 50 g (more than 10 times the normal value). Consequently, the noise in the carriages of the train increases by nearly 10 dB. The wheel-rail interaction caused by wheel polygonization accelerates the fatigue of key components of the railway vehicle, leading to the damage of gearbox cracking and axle box cover bolt breaking, which seriously threatens the safety of the train. For example, in the tracking test of CRH3 high-speed train, Chinese engineers found that the wheel polygonalization phenomenon was prevalent in the operation of this type of train on the Wuhan-Guangzhou line in South China. The detected vibration acceleration of the axle box increased exponentially with the increase of the polygonalization amplitude, and the out-of-limit loosening and the fracture of the bolts of axle box cover were also observed.
With the continuous increase of the running speed and mileage of high-speed trains in China, the wheel polygonalization has become one of the key problems to be solved urgently in today’s railway industry. Because the smoothness of wheel-rail contact directly affects the stability and safety of the vehicle and the service life of the vehicle and track components, the health condition of the wheel is very important for the operation of the vehicle. At present, most of the polygonalization problems are solved by wheel repairing or replacement, which makes cost of maintenance high and do not solve the problem completely. Therefore, it is necessary to study the mechanism of wheel polygonalization in order to predict damages.
The formation mechanism of wheel polygonalization and its effects on vehicle dynamic performance have been studied for decades, but there are still differences on its formation mechanism. There have been some achievements6–8 in the study of the relationship between wheel-axle resonance and wheel polygonalization, but the formation of high-order polygonalization has not been explained scientifically and effectively by the theory of wheel-axle resonance. Starting with the track characteristics, Meinke and Meinke 9 and others10–12 explored the response of the rail under external excitation and the connection between local modes and wheel polygonalization, which is of interest regarding the causes of high-order wheel polygonalization. However, there are differences in structures and parameters between different tracks. Therefore, influence of track characteristics on the formation of wheel polygonalization remains to study. Additionally, Wu et al. 13 and Cai et al. 14 applied the wheel-rail friction vibration theory to the study of wheel polygonalization with good research value.
As the mechanism of wheel polygonalization has not yet been completely understood, it is particularly important to identify, avoid or restrain the phenomenon. Li et al. 15 gave an overview of existing methodologies, theories, and applications applied in the data measurement and analysis systems to detect wheel defects in railway on-board health monitoring systems. Zampieri et al. 16 developed an on-board monitoring system installed on railway vehicles, which can detect malfunctions of several critical components by measuring and processing the signals detected on the axle-box, and on the bogie. Bosso et al. 17 designed and tested an on-board monitoring system installed on railway vehicles, which can detect anomalies of the running behavior of vehicles and faults at the component level. Sun et al. 18 proposed a detection framework based on the angle domain synchronous averaging technique, which can be used to monitor the conditions of axle-box bearings.
In on-board monitoring system, the time domain, and frequency domain analysis methods have been widely used to detect wheel polygonalization. In frequency domain, the feature parameters are usually gained based on the power spectral density of vibration acceleration. Unfortunately, the basis of power spectral density is Fourier transform, which is not an adaptive data analysis method and is not good at extracting nonlinear feature parameters. Since the vehicle-track coupled system is a dynamic system with a certain extent of non-linearity, does wheel polygonalization affect the nonlinear degree of vehicle system? When the hunting motion of the train caused by polygonalization is unstable, what is the extent of non-linearity of the system? Can the non-linearity index be used to detect wheel polygonalization? With the help of Huang’s19–21 works, the nonlinear degree of the vehicle system can be quantified and these questions have been answered in this study. Based on the adaptive signal processing method and the vehicle-track coupled system dynamics, this work focuses on the relationship between wheel polygonalization and the non-linearity of vehicle system vibration response, and puts forward the objective criterion for wheel polygonalization health monitoring.
Definition of the Degree of Non-linearity of dynamic response
Wheel-rail contact is the main difference between vehicle-track coupled system and other mechanical systems. The wheel-rail contact is characterized by obvious non-linearity, including nonlinear contact geometry, nonlinear creep force, and Hertz nonlinear normal force. The geometric relationship of wheel-rail contact is generally described by the contact parameters such as wheel-rail curvature, contact angle, and rolling angle at the wheel-rail contact point. In addition, the mechanical properties of anti-yaw damper and transverse backstop installed on rail vehicles are also nonlinear. During the service of the train, the wheel-rail wear is inevitable and unpredictable, and the contact parameters change non-linearly. When the hunting motion of the vehicle is unstable, the wheel flange may contact with the rail, the contact angle becomes larger, and the contact geometry relationship will be highly nonlinear. 5
The wheel-rail force consists of normal contact force and tangential creep force. The normal contact force is generally described by the nonlinear Hertz contact theory.22,23 The mathematical description of tangential creep force is more complex. Kalker 22 described the relationship between creepage and wheel-rail creep force during wheel-rail rolling contact under low creepage conditions, and gave a specific numerical solution of creep. Shen et al. 23 gave a nonlinear approximation of creep saturation.
Vehicle hunting motion is the essential attribute of vehicle-track coupled system and its stability is the key factor affecting running safety. According to the railway vehicle dynamics, there are two kinds of critical velocity in the railway vehicle system, namely, linear critical velocity and nonlinear critical velocity. The linear critical velocity can be obtained by the linearized mathematical model, which only exists in the ideal state with very small track excitation. In contrast, the nonlinear critical velocity is less than the linear critical velocity and is influenced by track conditions. In practical application, due to the influence of track excitation, the critical velocity of railway vehicles is always between nonlinear critical velocity and linear critical velocity. To ensure a high nonlinear critical velocity, anti-yaw dampers are usually installed between the car body and the bogie of high-speed train, and their nonlinear mechanical behavior is described by function of longitudinal relative velocity and damping force.
Because of the nonlinear characteristics, the vibration response of the vehicle system should also be nonlinear. According to the knowledge of sensor technology, linearity is an important index to describe the static characteristics of the sensor, which is based on the premise that the measured input is in a stable state. Under specified conditions, the percentage of the maximum deviation (between the sensor calibration curve and the fitting line)
So how should non-linearity be defined? Huang et al. 20 suggested to define non-linearity based on intra-wave frequency modulation (the deviation between instantaneous frequency and local average frequency). According to this recommendation, the first step in defining non-linearity is to correctly derive the instantaneous frequency (amplitude) and the local average frequency (amplitude). Gabor 24 proposed a method to obtain the time-varying frequency from the signal by using the analytical signal, and defined the instantaneous frequency as the derivative of the phase of the analytical signal. The problem with this method is that the resulting instantaneous frequency may be wildly erratic and negative at times. To overcome the shortcomings of traditional time-frequency analysis methods, Huang et al. 19 proposed a time-frequency analysis method called Hilbert-Huang transform (HHT), which consists of Empirical Mode Decomposition (EMD) and Hilbert transform. With the help of empirical mode decomposition, any complex data can be decomposed into a finite number of intrinsic mode functions (IMF) that allow Hilbert transform. The instantaneous frequency obtained by Hilbert transform of IMF corresponds to the fluctuation frequency that can be observed in the signal.
However, HHT needs to be improved from two key points. First, because Hilbert transform is limited by Bedrosian’s 25 theorem and Nuttall’s 26 theorem, instantaneous frequency should not be derived directly from Hilbert transform. It is recommended to use the “direct quadrature method” (DQ) and orthogonal Hilbert transform in Huang et al. 20 to calculate the instantaneous frequency. Secondly, one of the main disadvantages of EMD is modal mixing, which will cause serious aliasing of time-frequency-amplitude distribution, so that IMFs have no physical meaning. A recommended method to overcome modal aliasing is to use the noise-aided data analysis method proposed in Wu and Huang, 21 that is, Ensemble Empirical Mode Decomposition (EEMD).
The mean frequency of narrowband signal has a long history and the zero-crossing method is the basic method to calculate the mean frequency of signal. However, the result of this method is relatively crude because the defined frequency is constant over the zero-crossings period. Huang et al. 20 proposed an improved generalized zero-crossing (GZC) method, which takes all zero-crossing points and local extrema as control points, and improves the time resolution to 1/4 wave period. The GZC frequency of each point along the time axis is defined as:

where
The GZC local mean amplitude at each point along the time axis is defined as:

where
According to the suggestion of Norden Huang, the nonlinear extent of the signal can be described according to the deviation between the instantaneous frequency and the local average frequency, that is, the Degree of Non-linearity (DN) of a single component can be defined as:

where
This method provides an effective tool for quantifying the nonlinear degree of nonlinear models (such as Duffing model, Stokes model, Rossler model, and Lorenz model) and nonlinear systems (such as nonlinear mechanical systems and structural systems). It has been introduced into the signal analysis of vibration response of vehicle-track coupled system in Chen and Lin. 27
Nonlinear model of coupled vehicle-track system
According to the theory of vehicle-track coupled system dynamics,28–30 railway vehicle system and track system should be regarded as an overall large-scale system, and the wheel-rail relationship is the key link between the two subsystems, so that the essence of railway wheel-rail system can be reflected more objectively. Vehicle-track coupled dynamics includes vertical dynamics, transverse dynamics, longitudinal dynamics, and space coupled dynamics. In this study, a high-speed train-track space coupled system model is established, including Chinese CRH2 high-speed train sub-model and ballastless track sub-model, as illustrated in Figures 1 and 2. The nonlinear factors considered in vehicle system modeling include the nonlinear wheel rail contact force, the nonlinear stiffness of transverse backstop and the nonlinear damping force of anti-yaw damper. The established model is described as follows.
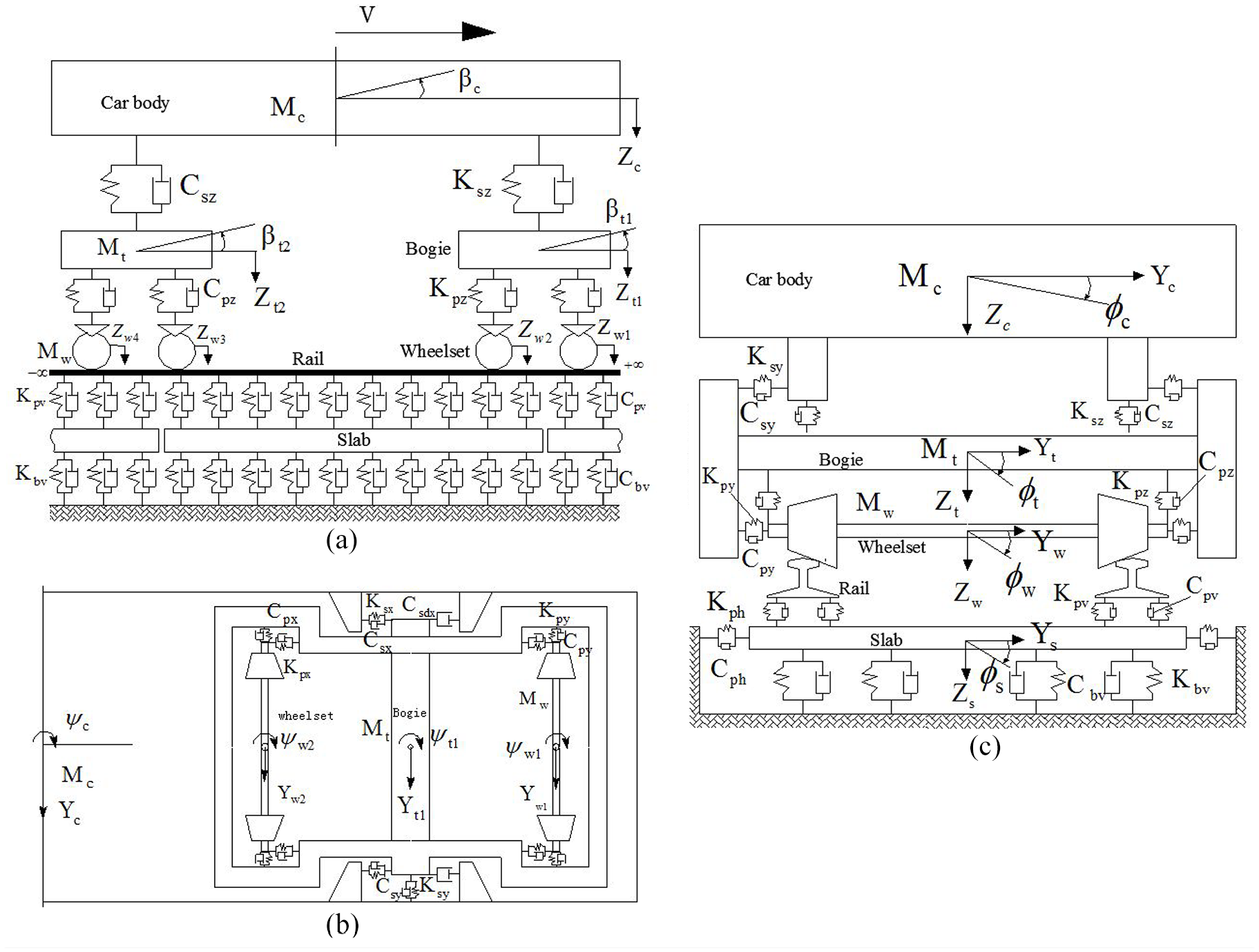
Model of vehicle-track coupled system: (a) side view, (b) top view, and (c) front view.

Model of the slab ballastless track.
Nonlinear vehicle-track model
The considered train model is supported by two two-axle bogies at each end and each bogie is supported by two wheelsets. The car body, bogie, and wheelset each have five degrees of freedom (vertical, lateral, rolling, sloshing, and nodding motion), so the vehicle system is a lumped mass system with 35 degrees of freedom. The lumped mass system includes the mass and moment of inertia of the car body, the mass and moment of inertia of the two bogies, and the unspring mass and moment of inertia of the four wheelsets. As shown in Figure 1,
When the high-speed train is running at a relatively high speed on the track, even the small transverse movement of the vehicle may cause violent hunting movement, which greatly reduces the stability and safety of the train. In general, high-speed trains are equipped with anti-yaw dampers to slow down the hunting movement between the bogie and the car body. The main function of anti-yaw damper is to restrain the hunting movement of high-speed main to ensure the stability and safety of the train. The nonlinear longitudinal damping force of anti-yaw damper 27 is written as
Where
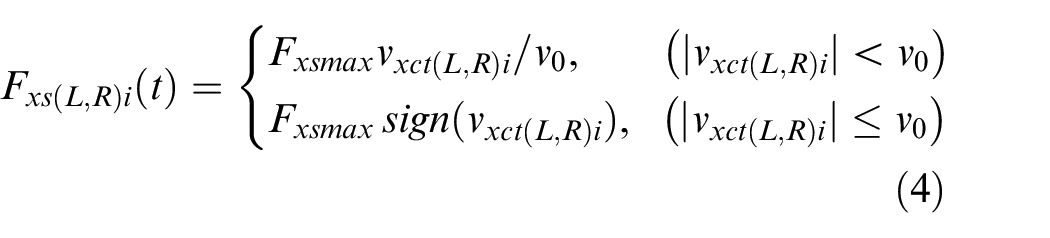
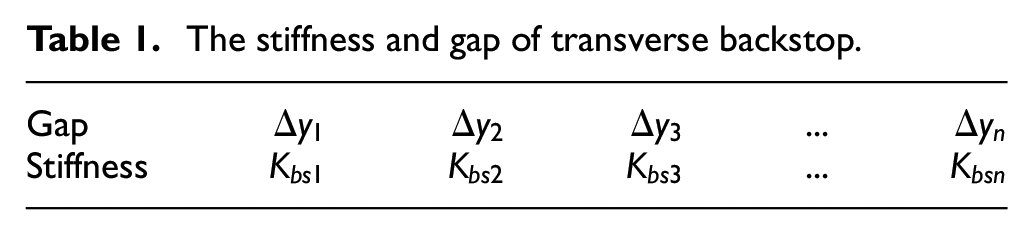
When the train passes through some curves, the car body is very easy to make a large transverse movement. To ensure the curve passing capacity of the vehicle and improve the running performance, transverse backstops are installed on the secondary suspension system. The function of the transverse backstop is to cushion the transverse impact between the car body and the bogie and to limit the excessive transverse movement. The stiffness
The stiffness and gap of transverse backstop.
The track model adopted in this study is the slab track commonly used in Chinese high-speed railway lines, as shown in Figure 2. Detailed system description and equations can be found in Zhai et al.28–30
Nonlinear wheel-rail contact model
According to the dynamics theory of vehicle-track coupled system, the interaction between the vehicle and track system is realized by wheel-rail forces compatibility at the wheel-rail interfaces. The wheel-rail force consists of normal contact force and tangential creep force. The normal contact force is described by the following nonlinear Hertz theory:

Where,
Kalker 22 described the relationship between wheel-rail creep force and creepage in rolling contact at low creepage, and proposed a detailed method for numerical solution of creep force. Shen et al. 23 gave the following nonlinear approximate calculation formula of creep force saturation:

where
When a reduction coefficient is defined as

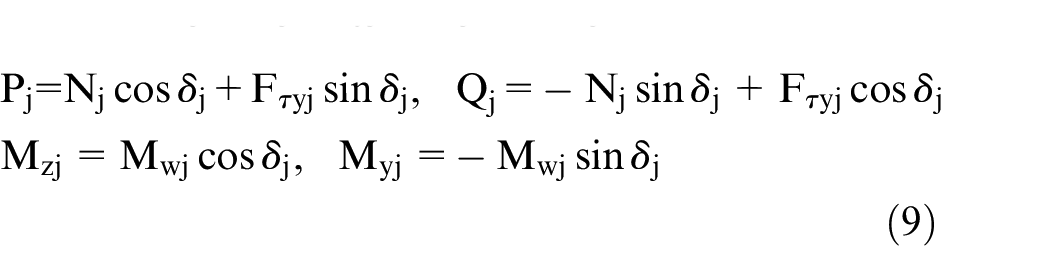
The nonlinear creep forces and spin moment are given by

where
Therefore, the vertical force
where
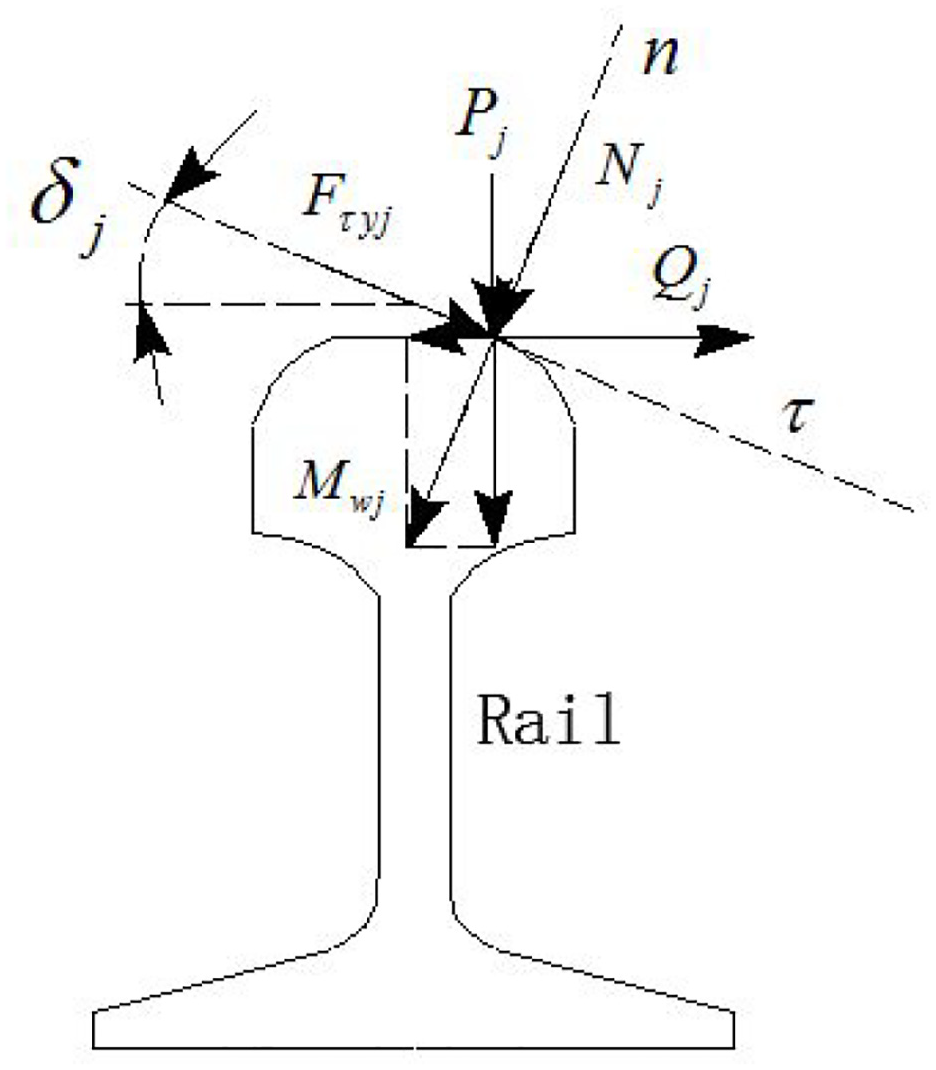
Rail forces diagram.
Model of wheel polygonalization
Wheel out-of-roundnesss includes local out-of-roundnesss and circumferential out-of-roundnesss. 5 The local out-of-roundnesss is mainly characterized by flat scar and peeling, which is caused by braking thermal damage and rolling contact fatigue. Circumferential non-roundness is mainly characterized by wheel polygonalization, such as eccentricity, ovalization, triangulation, quadrilateral, and high-order polygonalization caused by wheel wear (or machining).
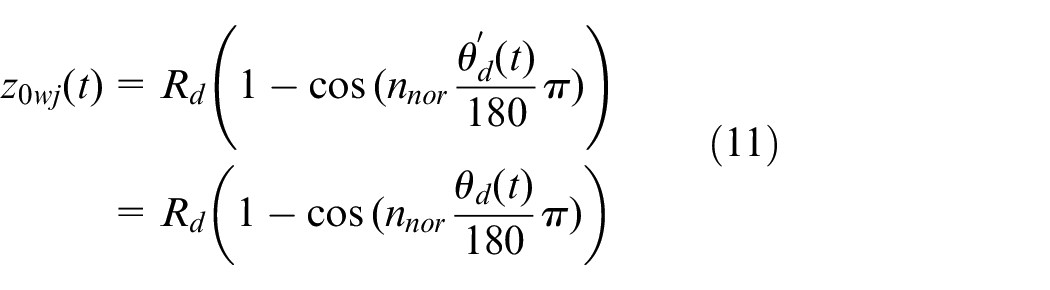
As shown in Figure 4, the irregularity function of wheel polygonalization is defined as

where
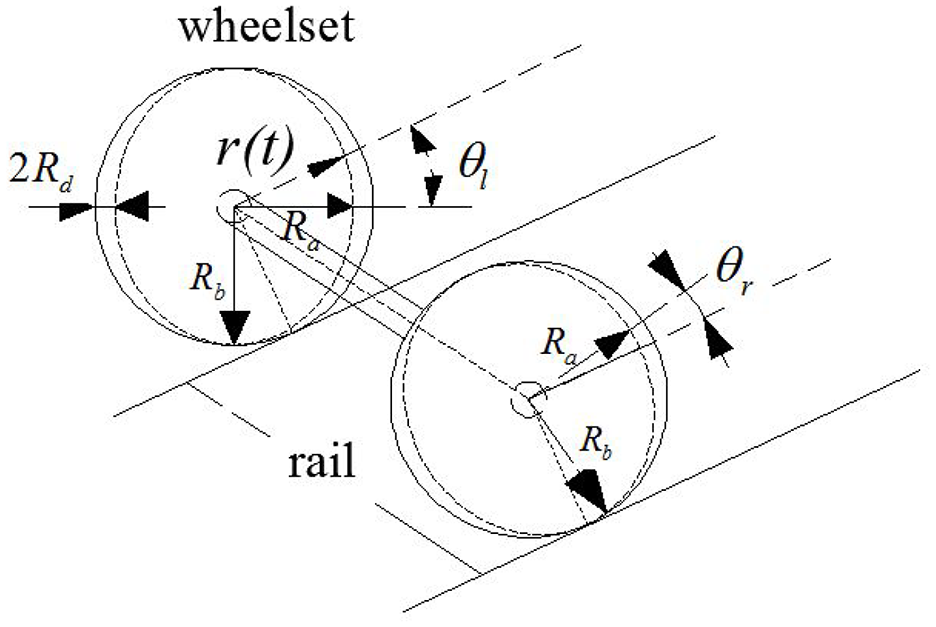
Model of wheel polygonalization.
Numerical method and parameters
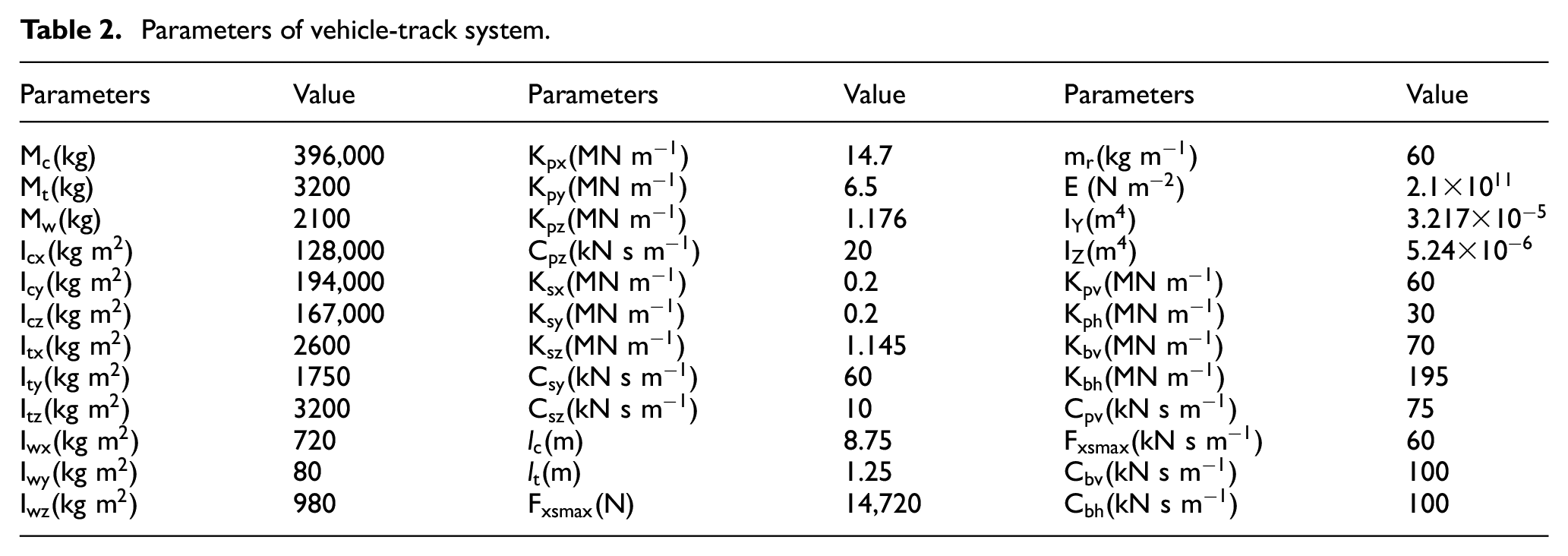
The improved explicit numerical integration method proposed by Zhai and Cai 28 is used to calculate the vibration response of the high-speed train track coupled model. When solving the dynamic equation, both initial and boundary conditions are set to zero. The proposed wheel polygonalization model is similar to the model used by the SIMPACK software, and results are in good agreement with those of Zhang et al. 5 The effectiveness of the model of vehicle-track coupled dynamics and the improved explicit numerical integration method has been demonstrated by several studies.28–30 Parameters of train and track used in this work are given in Table 2.
Parameters of vehicle-track system.
Results and discussion
Whether the vibration response of a vehicle system is stable or not is related to the order
Analysis of stable dynamic response
Theoretically, if
Obviously, the value of the irregularity function when the angle difference
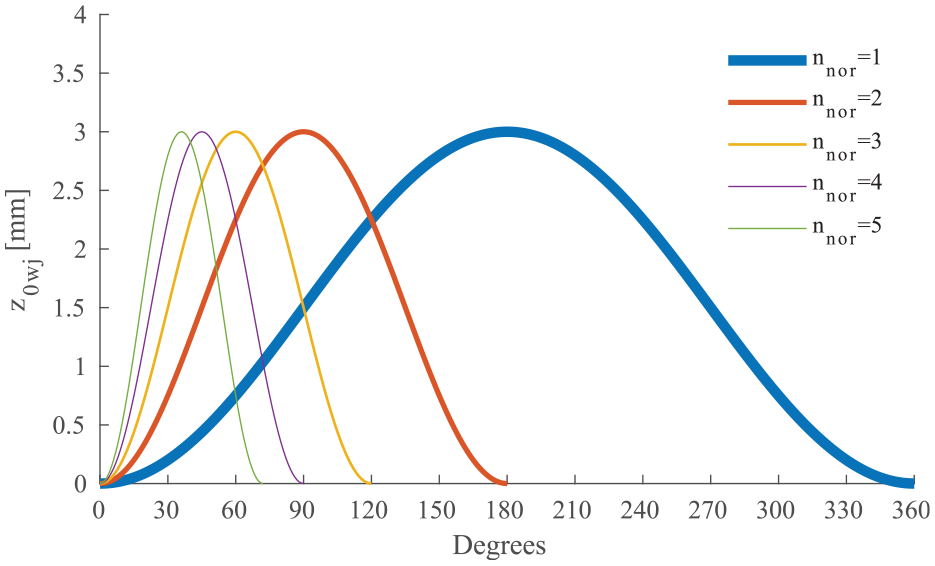
Irregularity function curves of wheel polygonization.
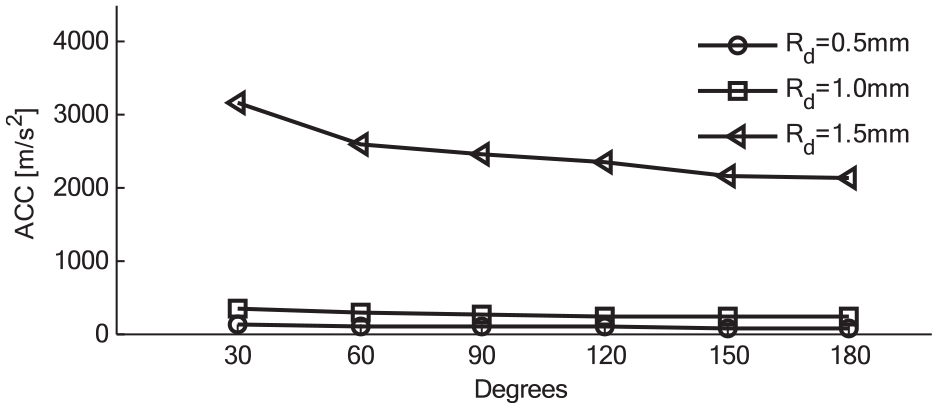
The first-order polygonalization of wheels, wheels eccentricity, is studied first. The hypothesis is made that the eccentricity exists only on the wheelset
Vertical acceleration of wheelset
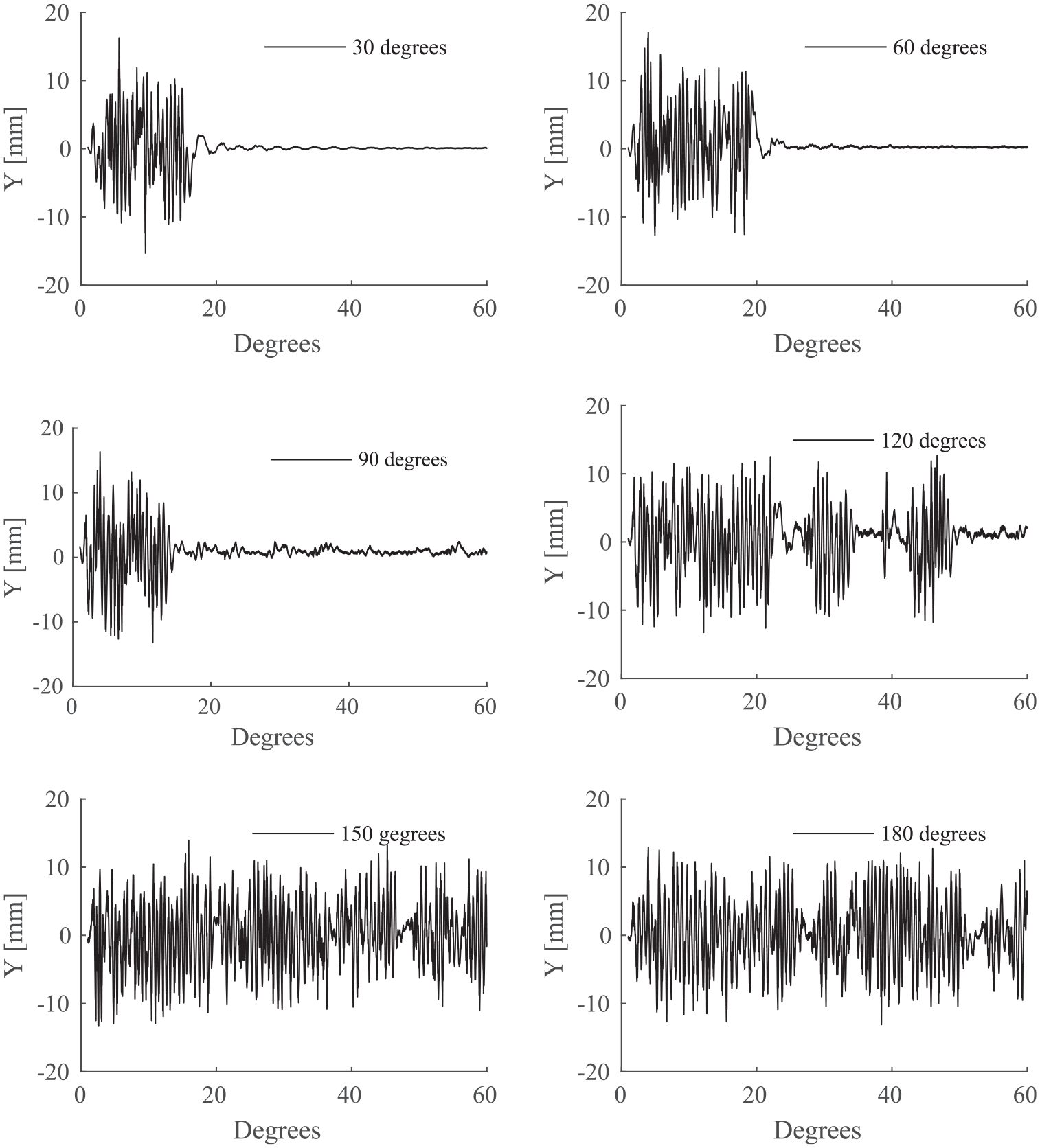
Figure 7 shows the curves of the vibration response of the wheelset
Dynamics response of wheelset
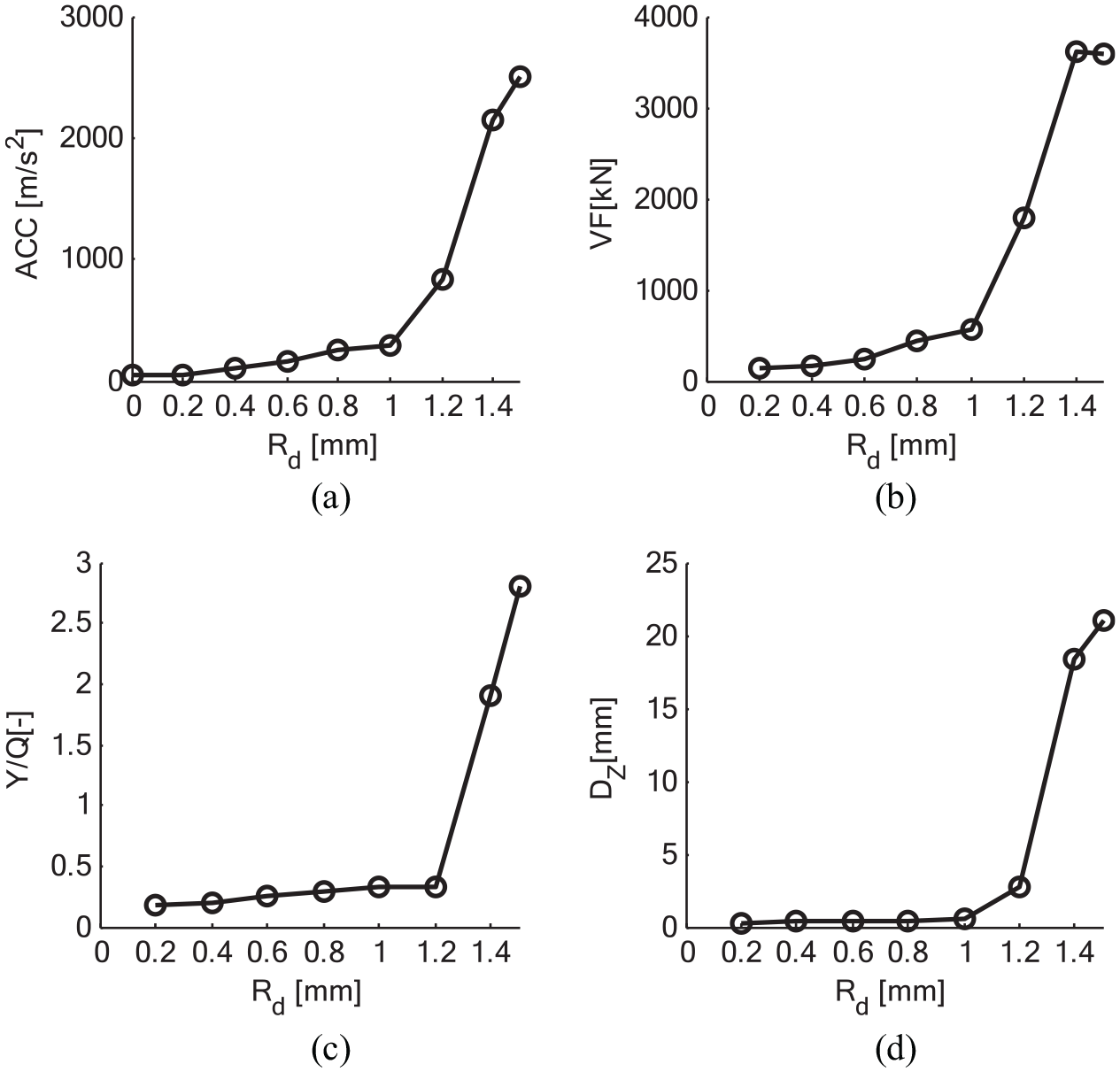
Figures 8 to 10 show the maximum vertical acceleration of wheelset, the maximum transverse acceleration of bogie and the maximum transverse displacement of wheelset
Vertical acceleration of wheelset
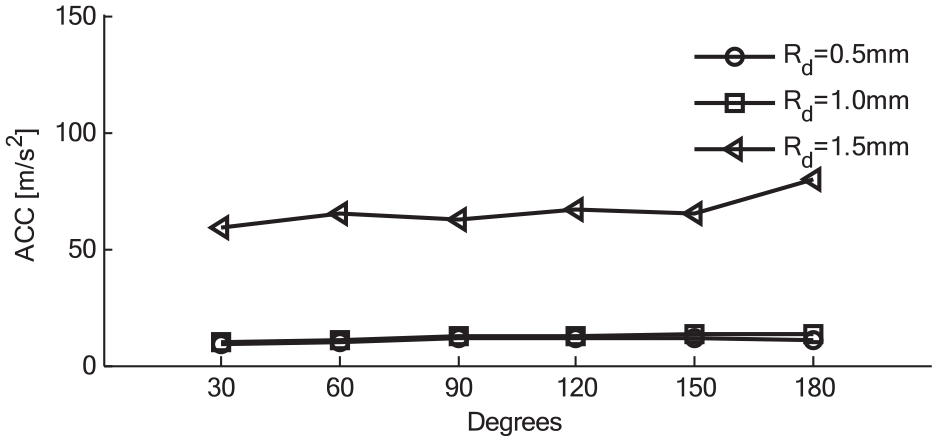
Transverse acceleration of bogie
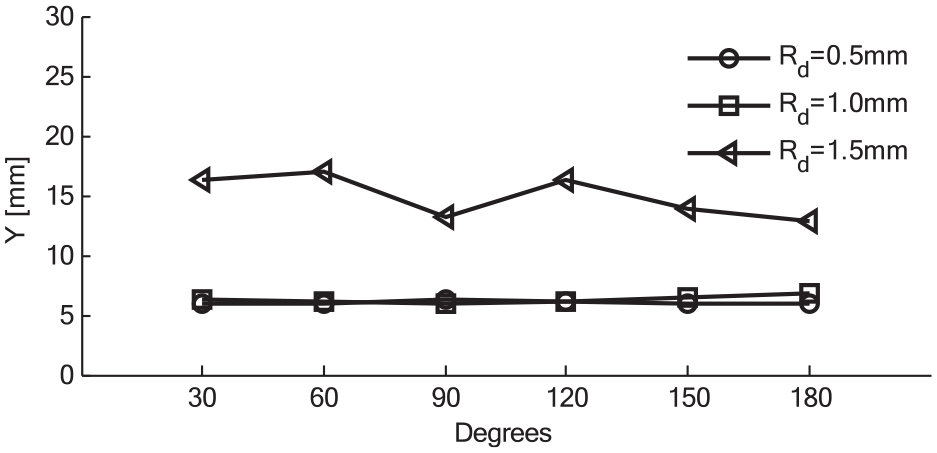
Transverse displacement of wheelset
Transverse displacement of wheelset
As mentioned in section 2, the first step to analyze the non-linearity of vibration is to decompose the dynamic response by using EMD (or EEMD) to yield IMF components. For brevity, detailed decomposition is omitted here. The instantaneous frequency and amplitude of IMFs can be deduced by DQ method,
20
to construct the time-frequency-amplitude spectrum of IMFs. Typical local instantaneous spectrum of the vertical vibration acceleration of the wheelset
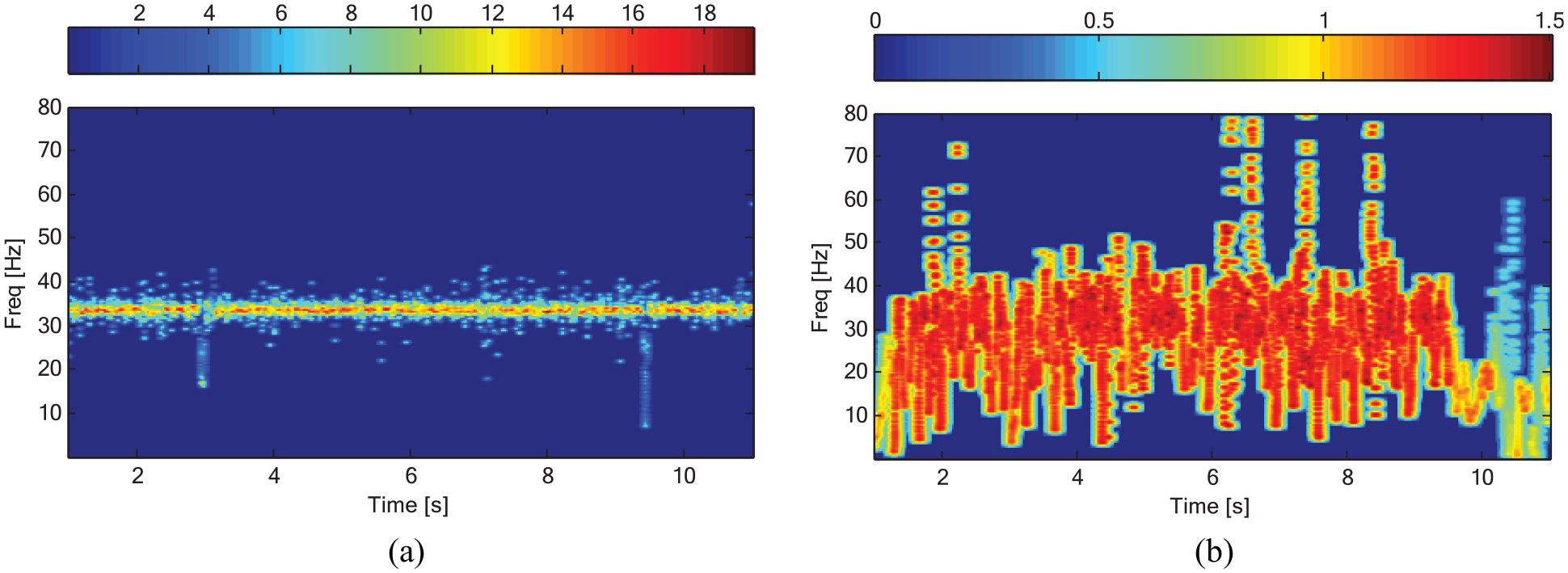
Local instantaneous spectrum of vertical acceleration of
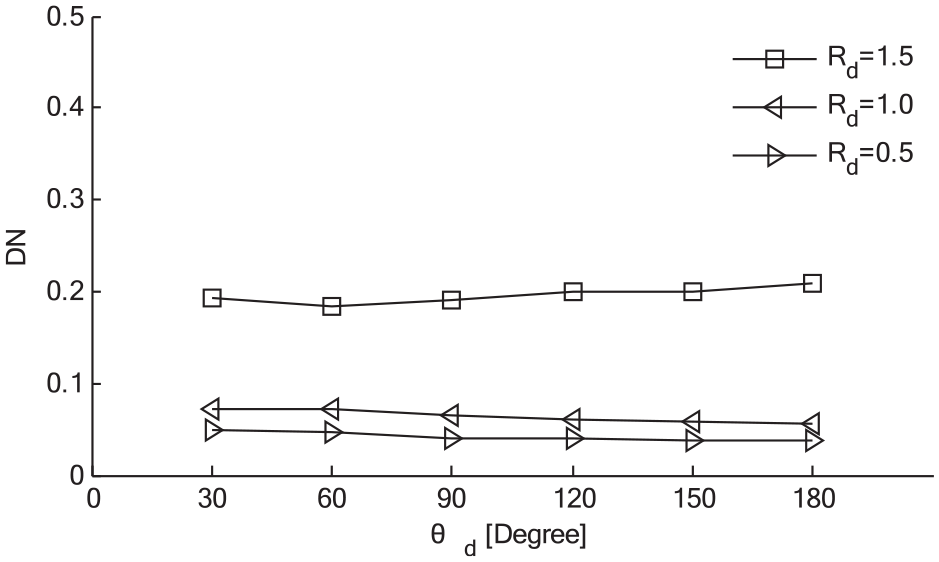
Figure 13 shows the DN of the vertical vibration acceleration of the wheelset corresponding to
DN for vertical acceleration of wheelset
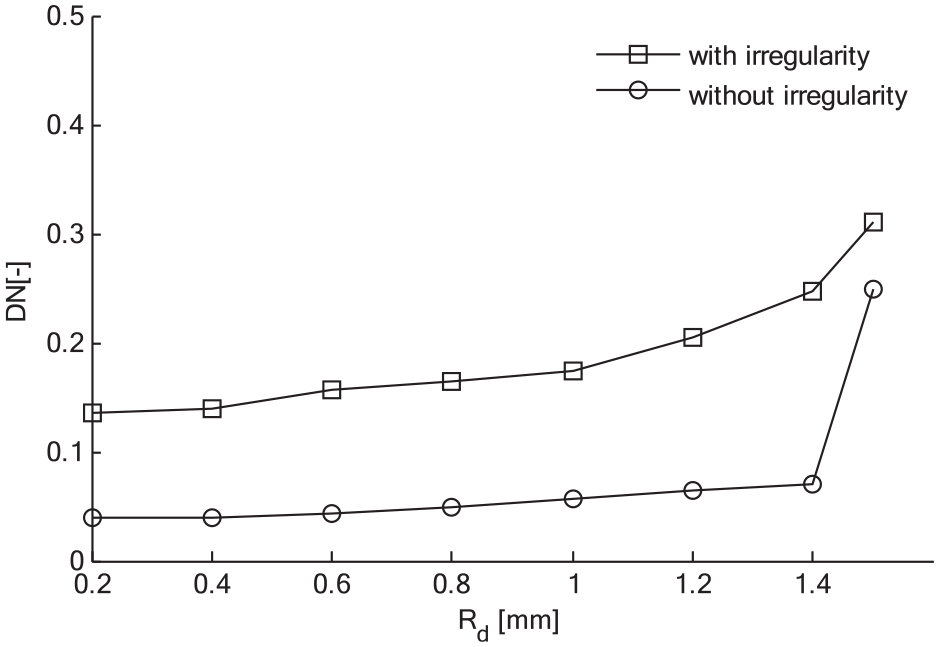
Figure 14 shows the DN of the vertical vibration acceleration of wheelset

DN for vertical acceleration of
DN for transverse acceleration of bogie
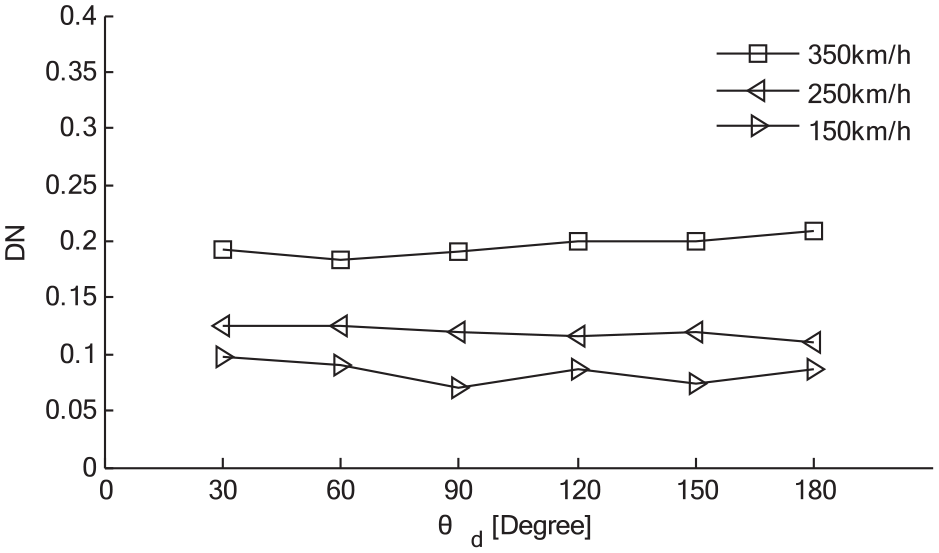
DN for transverse acceleration of bogie
DN for transverse acceleration of carbody influenced by speed and
The analysis indicates that if DN of the wheel eccentricity feature frequency component of the wheelset’s vertical acceleration exceeds 0.2, DN of the bogie transverse acceleration exceeds 0.1 or DN of the car body transverse acceleration exceeds 0.2, the train should be considered unhealthy.
In this second part, the second order wheel polygonalization, wheels ovality, is studied. It is assumed that the ovality exists only on wheelset
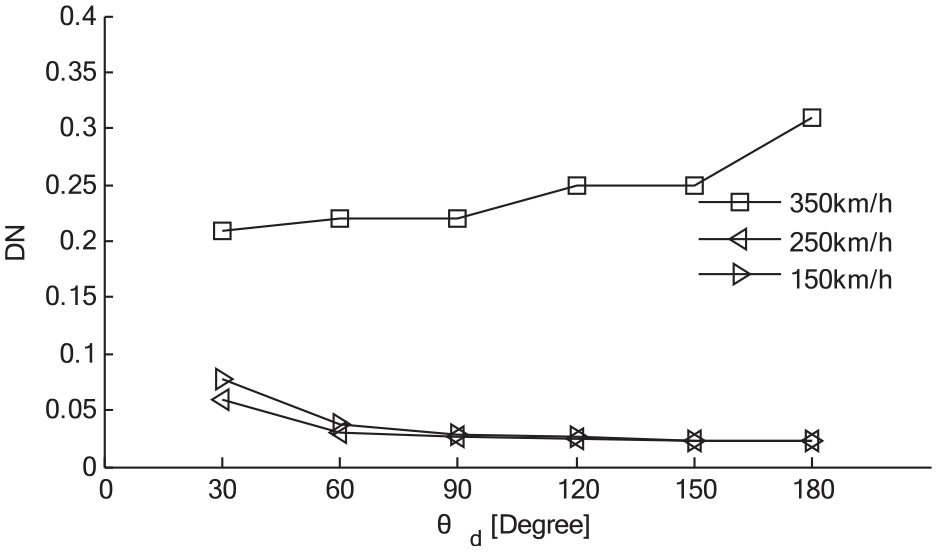
Figure 18 shows the DN of the transverse acceleration of bogie
DN for transverse acceleration of bogie
Figure 19 shows DN of transverse acceleration of bogie
DN for transverse acceleration of bogie
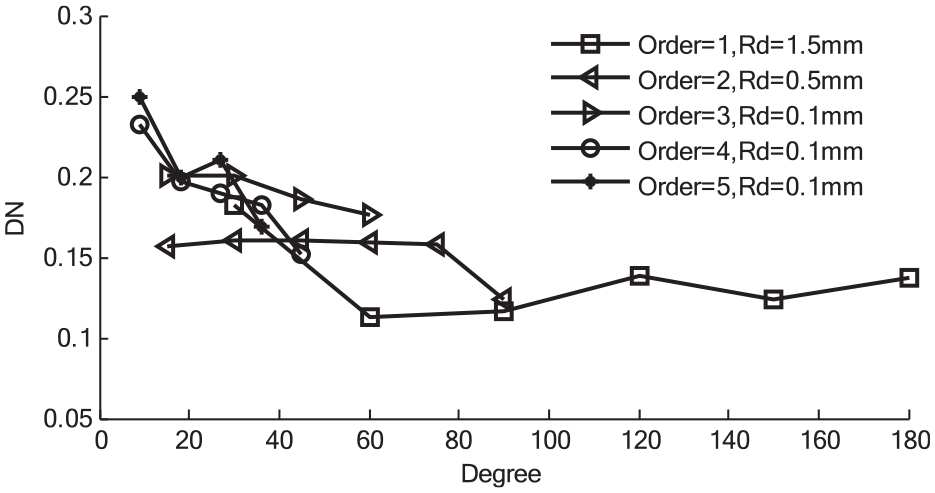
Next, the influence of high-order (
DN for transverse acceleration of bogie
The calculation also indicates that: if
Through the above analysis, it can be concluded that:
Generally, the wheel is in close contact with the rail, DN of polygonalization feature frequency of transverse acceleration of the bogie is <0.05, the Degree of Non-linearity is relatively small and is hardly affected by
When the wheel impact the rail, DN of polygonalization feature frequency of transverse acceleration of the bogie exceeds 0.1 and the Degree of Non-linearity of vibration increases significantly.
In summary, if the DN of polygonalization feature frequency of the transverse acceleration of bogie exceeds 0.1, the train should be considered unhealthy.
Analysis of unstable vehicle hunting motion
The polygonization of wheel is characterized by the periodic deviation of the diameter of the wheel rolling circle along the circumferential direction, which leads to the asymmetric wheel-rail contact. This defect will seriously reduce the nonlinear critical velocity of the vehicle and aggravate the transverse vibration of the wheelset. The high-order wheel polygonalization can greatly disturb the wheel-rail normal force and the running state of the wheelset, and therefore causes the wheel-rail creep force to fluctuate. It results in a wheel circumferential non-uniform wear which has an unpredictable and destructive impact on the vehicle hunting stability. When polygonalization exists on the two wheels of the same axle, height difference between the left and right sides is easily generated, which tends to make the vehicle shaking head and the wheelset producing transverse hunting displacement and transverse acceleration on the rail surface. This transverse hunting motion can aggravate the wears of the wheel and rail with risk of derailment in serious situations.
The previous discussion shows that wheel-rail impact does not always result in vehicle hunting instability, as the critical velocity of modern high-speed train is high. The calculation method of the critical velocity is made as follows: first, the train runs on a finite length track with irregularity excitation. Second, the train runs on an ideally smooth track. By observing whether the transverse vibration of the vehicle can be attenuated to the equilibrium position or not, the critical velocity of the system can be determined. The results show that the critical velocity decreases with the increase of
(a) The transverse vibration of the wheelset
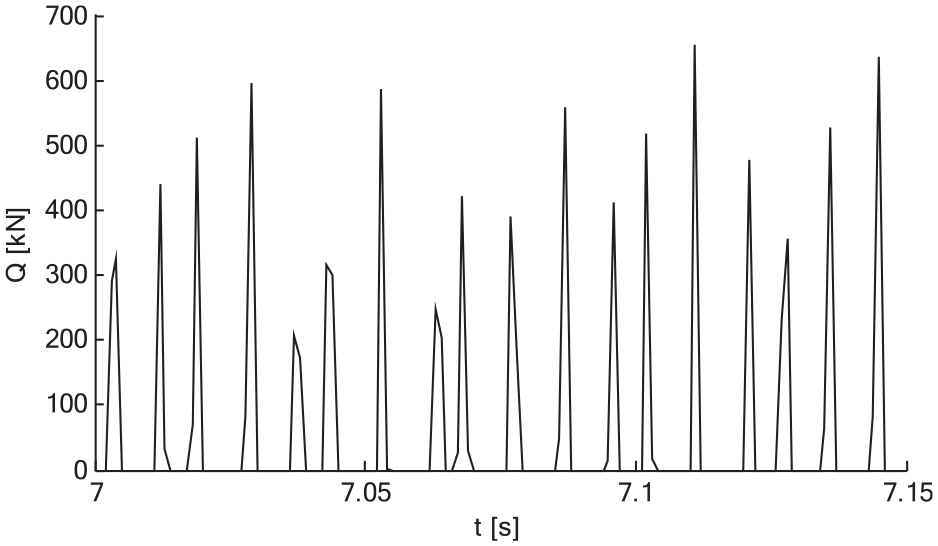
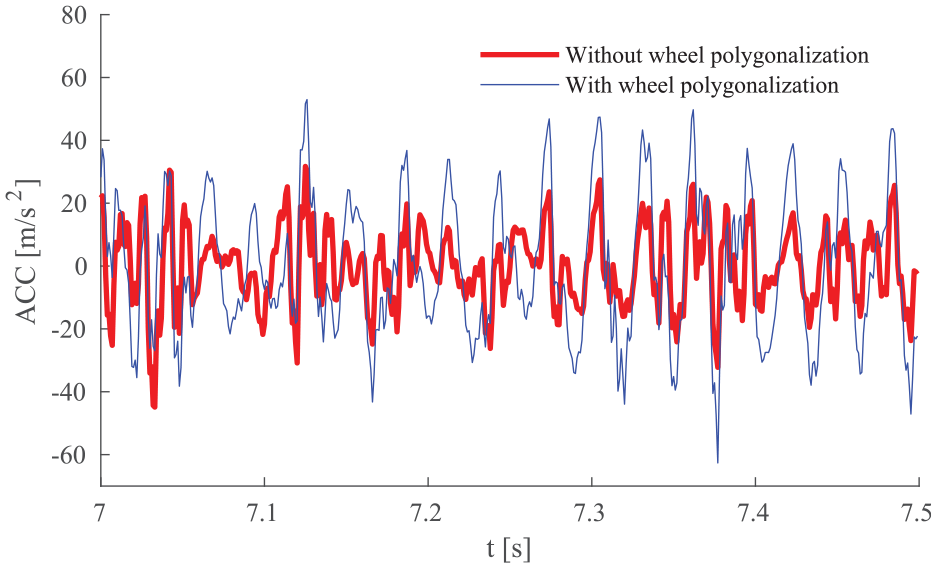
The high-frequency wheel-rail impact force cased by the fifth order wheel polygonalization (
According to the theory of railway vehicle dynamics, the Hopf bifurcation method
31
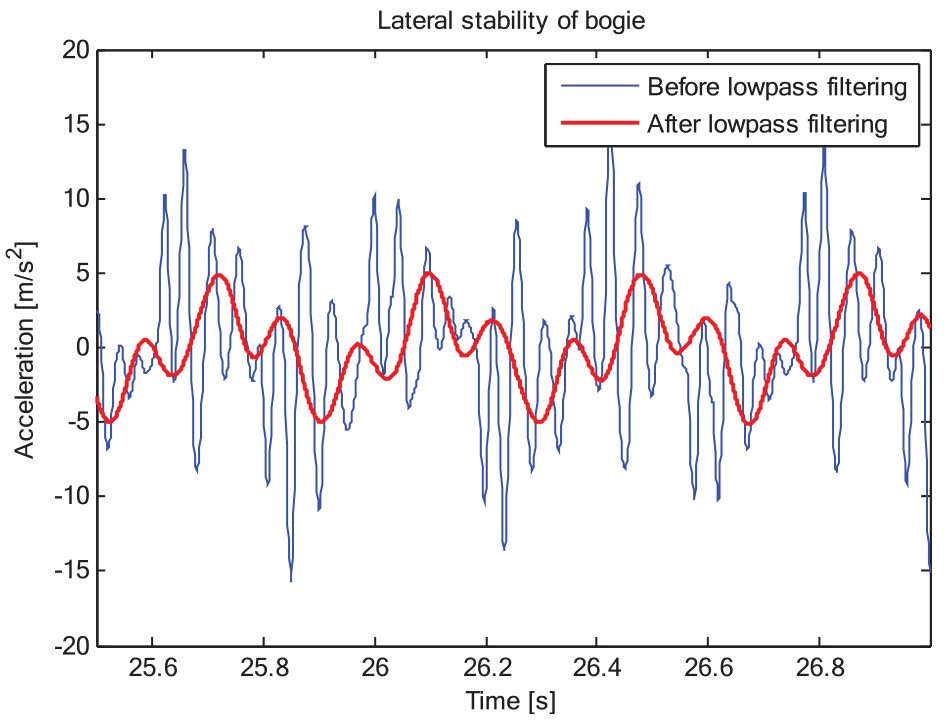
is generally used to analyze the nonlinear stability of the hunting motion of the vehicle. If the amplitude bifurcation is observed in the limit cycle of the hunting motion, the vehicle system becomes unstable. In railway engineering applications, the hunting stability of vehicles on the line is generally evaluated by tests in Europe and China, and the time domain response of transverse vibration of bogie frame is commonly used for evaluation. In China, the objective criterion for evaluating the hunting stability of the train is established as follow: the transverse acceleration signal of the bogie frame is measured and filtered by 10 Hz low-pass filtering. If there are six consecutive peaks reaching or exceeding 8
This criterion is applied to study hunting stability of trains influenced by wheel polygonalization (
Hunting stability of high-speed train influenced by wheel polygonalization (
This work tries to explore the evaluation criterion from the perspective of Degree of Non-linearity. The DN of the vehicle system response in the unstable state of hunting motion is studied. It is assumed that the train runs at 350 km/h speed on a straight track with track excitation and that the data of the track excitation model are derived from the measured track irregularity spectrum of Beijing-Tianjin high-speed railway. It is also assumed that one anti-yaw damper between the bogie
DN for transverse acceleration of bogie
In summary, when the hunting motion of the vehicle is unstable, (1) DN of hunting feature frequency of the bogie transverse acceleration exceeds 0.1; and (2) DN of hunting feature frequency tends to decrease with the increase of
Conclusions
In this investigation, influences of wheel polygonalization on Degree of Non-linearity of stable and unstable dynamic response of a high-speed train system were studied based on the theory of vehicle-track coupled dynamics and the definition of non-linearity extent of dynamic response. Results indicates that when
Beside the elucidation of the wheel polygonalization mechanism, it is particularly important to establish criteria which help to effectively anticipate, and therefore avoid or restrain, wheel polygonalization that may lead to damages and disasters. Based on the results, an objective criterion for wheel polygonalization health monitoring is proposed: if the Degree of Non-linearity of polygonalization frequency of bogie’s transverse acceleration exceeds 0.1, or if the Degree of Non-linearity of hunting frequency of bogie’s transverse acceleration exceeds 0.1, the train should be considered unhealthy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.