
Abstract
Unmodelled dynamic factors are either the left-over or the estimated factors such as lower or upper bound values while modelling any mechatronic system. Hence, with the inclusion of under-actuation in a system such as fewer number of actuators as compared to degrees of freedom, this will lead the system to high instability. These factors are changing instantly during multiple flights of quadrotor that is, the values of these factors in path following may vary from the values in hovering mode. Hence, it is one of the strenuous tasks to tackle these unmodelled dynamic factors for the multiple flight modes of an underactuated quadrotor craft. One of the better ways for tracking control of a quadrotor aerial vehicle with unmodelled dynamics is to observe and estimate the instant change in parameters. Thus, this paper exhibits an extensive review of several hybrid observer design methods being fused with some novel control strategies. In addition to this, the survey paper also summarises the limitations of the current state of the art approaches. This paper demonstrates an unexplored field of study where researchers must need to evaluate the performance of hybrid observer design methods.
Introduction
Since the literature is crammed with the study of robust, adaptive and adaptive-robust control designs for operating the quadrotor in multiple flight modes with aggressive manoeuvres. Most of these controllers provide trade-off results for unmodelled dynamic factors thus, researchers opt hybrid control strategies for better tracking performance. These hybrid controllers provide compromising results even after being fused with different observer designs. The researcher must compromise on several things such that chattering phenomenon (high oscillations at rotors) due to switching in between control sub-blocks, transient and steady-state errors, delay in accelerations and lastly tracking errors.
The taxonomy of this paper is partitioned into six sections. Firstly, one may understand the aim and objective of this paper through an introduction. The second section of the dynamic model addresses some ordinary differential equations of the quadrotor. Thirdly, limitations of previously discussed research contributions are stated under the section of Literature Review. Under the fourth section of technical issues and analysis, one may find exactly the discussion about the compromising results. With the support of technical analysis; one may be assisted to explore several aspects in this area. Lastly, the whole idea of the paper is summarised with a comprehensive conclusion.
Fully versus underactuated systems
There are two popular methods to derive equations of motions namely Newton Euler and Lagrangian formulation techniques. The Newton Euler method defines the equation of motion with the help of the second law of motion and in terms of force and momentum. The Lagrangian method provides the system’s behaviour in terms of net energy. The idea behind both formulations is to acquire the set of equations that defines the motion. Consider the general equation of an actuated system,

The provided equation (1) is the general equation that can be used for both fully actuated and underactuated systems where

whereas an under-actuated system can be defined in same way, but it has no ability to command an instant change in acceleration in arbitrary direction in

In simple words one may conclude that a system can be said as an under-actuated system if its external forces are unable to exert an acceleration to its states in all directions or a system that cannot follow the arbitrary trajectories. One can say that the input matrix

Underactuated quadrotor model
System that is by-default underactuated such as quadrotor, is highly unstable dynamic system. It is underactuated because of 04 control inputs and six degree of freedoms (DOF). These systems have low cost, low maintenance and less power consumption and with the induction of unmodelled dynamic factors it becomes much difficult to stabilise it in specific flight mode. As far as its construction is concerned, it has been modelled in a cross configuration with symmetrical arms that provides the centralisation of the payload. The system state variables are controlled using thrust, roll, pitch and yaw and these are directly dependent on the velocities of every propeller. Even after being highly unstable system, it is believed that certain control designs can stabilise it to attend a certain altitude and attitude subsequently. 1
It is studied that the equations of motion, aerodynamic forces and input turning effect (torque) are obtained through body frame of reference which is non-inertial frame too whereas the other one is earth frame of reference or known as inertial frame of reference. These two reference frames are used to define the motion of underactuated quadrotor. The earth inertial frame of reference is denoted by (E-frame) and symbolised by (
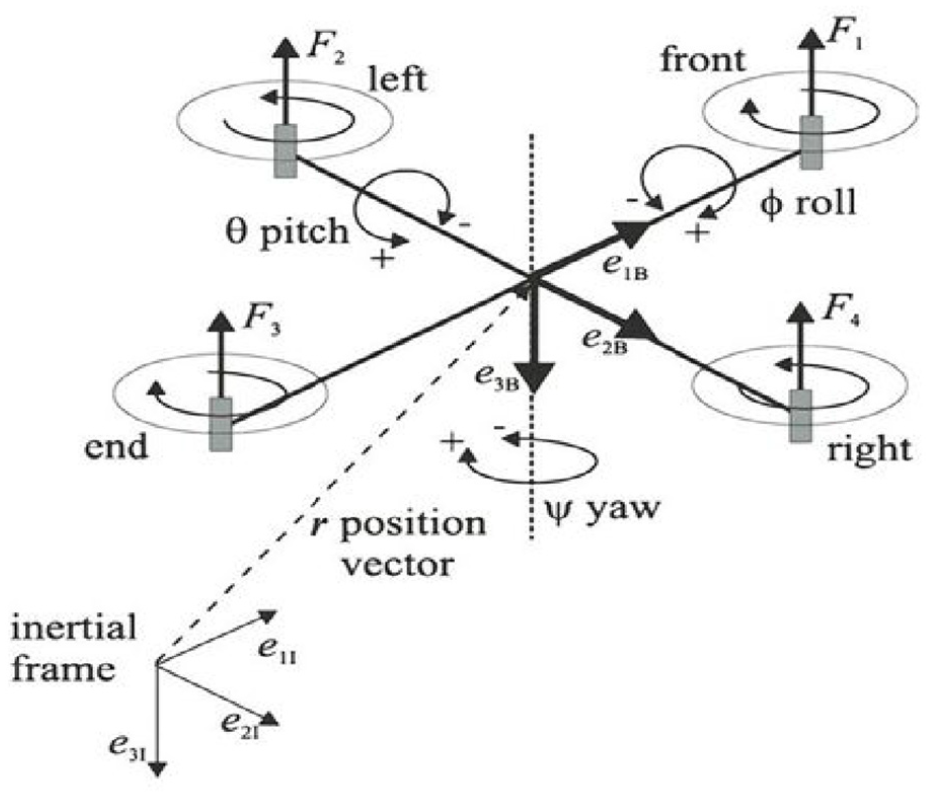
Underactuated quadrotor model. 2
Moreover, the B-frame attached to the quadrotor body is right hand reference frame and it is denoted as (
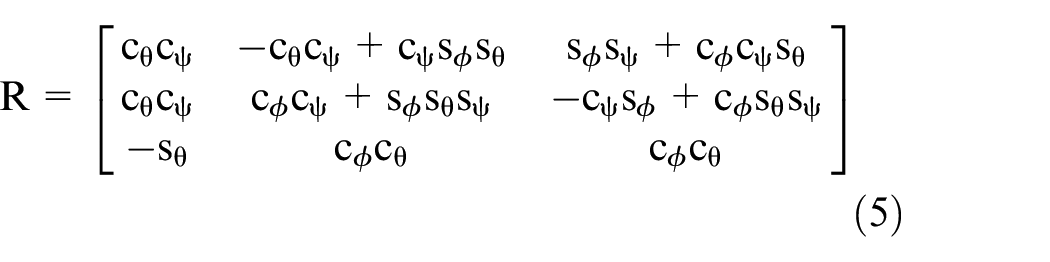
where

where
Literature review
As discussed before, with an inclusion of unmodelled dynamic factors, the practical and precise dynamic model of underactuated quadrotor craft becomes difficult to control 5 even in single flight mode. People have proposed various modelling approaches, but the most common approach of modelling is the Newton Euler formulation. It is a white box modelling and preferred when physical knowledge of the plant is given but the derived model is not completely real.5,6 Some researchers also used black box modelling or system identification technique by performing some experiments where any sort of disturbance and time delays can easily be witnessed but it requires complex and costly hardware setup. 7
By studying different research, it has been observed that the Newton Euler formulation method is most frequent approach (mathematical approach) to derive the set of differential equations. In the same research contributions, the use of smart algorithms is also observed, hybridised with the control designs as one of their sub-control blocks to tackle the unmodelled dynamic factors. These techniques are proposed to acquire the hardly obtained parameters such that payload mass, inertia and wind disturbance etc. with an extensive use of sensors.8–11 Thus, the possible approach that can be used in acquiring the realistic model is grey box modelling because of following reasons:
Physical knowledge of the plant
Adequate dynamics of process
Accommodate the sensor-oriented data set.
Involvement of mathematical approach.
Hybrid control designs with observer design methods
Since, the objective of this proposal was to investigate the ability of previously proposed algorithms meant for tackling the unmodelled dynamic factors. It has been experienced that there are several research contributions since decade for the topic. Majority of the algorithms follow a trend of merging a control design with some sort of special estimator or observer technique. This sub-section will address all popular techniques for tackling unmodelled dynamic factors and in last conclude the research gap for our proposed research topic.
Starting from the most popular control designs, Proportional Integral (PI) that has been seen, amalgamated with extended Kalman filter to address the exogenous factor that is, wind disturbance on the trajectory tacking of quadrotor but due to the accelerometer’s external noise and insufficient tuning of gains, tracking errors were observed with huge settling time. 12 Backpropagation neural network-based estimation merged with backstepping control design to address the wind disturbance like unmodelled factor again, but deviation of quadrotor has been observed at 33rd seconds in the simulation within finite time of simulation. 13 In the same contribution, memory constraints were also observed that does not accommodate the online data set from inertial measurement unit for further estimation.
In addition to this, Genetic algorithm (GA) with adaptive control design that is, Fuzzy is proposed (Xu Q et al., 2020). 38 The process time due to fuzzy set of rules is comparatively high 14 and some overshoots were also observed during aggressive manoeuvres. The similar approach 15 is observed when two parallel fuzzy model is used with GA where fuzzy set of rules are based on single dimension. This technique reduces the computational time but still the overshoots are there. The techniques like robust compensator 16 and integral square error 17 can be amalgamated with sliding mode control (SMC) or proportional-integral-derivative (PID) technique. The only limitation with these techniques is the settling time hence in this scenario, quadrotor will need much time to stabilise again and follow the trajectory smoothly, whereas chattering effect is observed for SMC design.
In comparison with existing techniques such that disturbance observer, 18 neural network based estimation,19,20 fuzzy logic based estimations 21 and nonlinear extended state observer, 22 Linear extended state observer (LESO) 23 is better option because its parameters are easy to tune unlike disturbance observer and high convergence rates as compare to neural and fuzzy estimation approaches. It is observed that with the induction of hyperbolic function in the control design for non-smooth disturbances that is, dual loop integral sliding mode control 23 with LESO provides better estimation but with high settling time and chattering effect. In order to reduce the chattering effect, one may go for below mentioned methods:
Using high gains of SMC
Using Super twisting algorithm 24
Chattering can be reduced using Terminal Sliding mode 25
Integral form of SMC (chattering and huge steady state error)
Use a low pass filter for control input signal
Since individual approaches have some limitations, for instance the issue of singularity with Euler angle approach and sign ambiguity with quaternion restricts the ability of UAV to track the trajectories. Thus, quaternion approach is merged with non-linear disturbance observer (NDO) 26 but it has been observed that due to small measurement noises that were unobserved by the NDO results the tracking errors and some overshoots appeared at the occurrence of wind disturbance in system.
For control designs, classical controllers are insufficient for the closed loop performance, model reference adaptive schemes are challenging to develop and for fuzzy based designs detail model information is required hence this results in poor robustness against the unmodelled dynamic factors. Since the sliding mode is insensitive to uncertainties but requires estimation or observer designs for upper bound uncertainties. SMC design also generates the chattering noise around the sliding surface that degrades the control performance, but this can be reduced as discussed.24,25
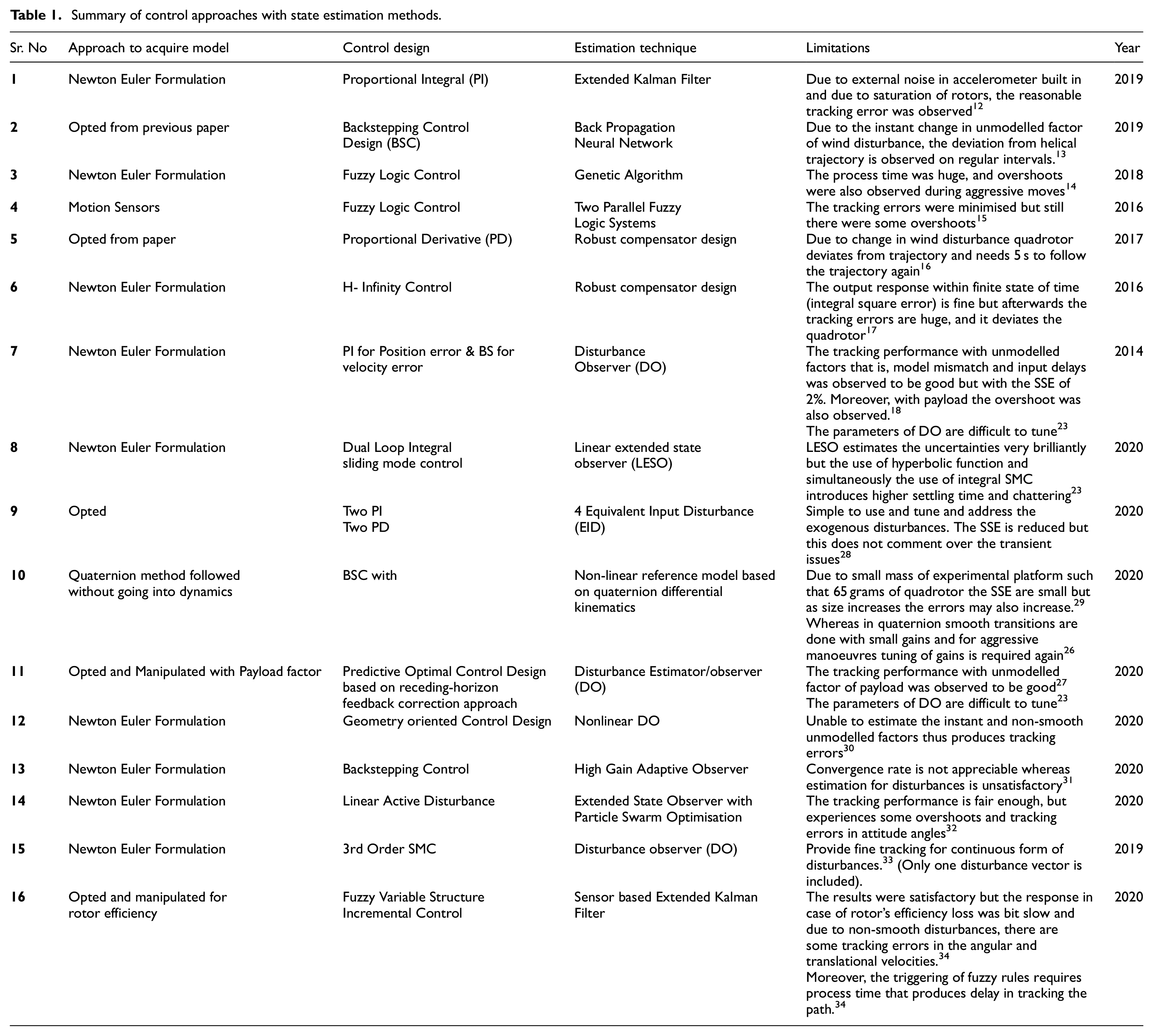
For slow and smooth disturbances, the backstepping (BS) with nonlinear disturbance observer or ESO have been effective but they are limited for non-smooth disturbances. Discussing further, Predictive Optimal Control design based on receding horizon feedback approach 27 provides better results to deal with non-smooth disturbance (unknown payload only) with the help of disturbance estimator. These all schemes along with control design, they have opted for are shown in Table 1.
Summary of control approaches with state estimation methods.
State of the art and its limitations
In the paper, 18 three unmodelled dynamic factors are considered namely wind disturbance, payload variation and rotor efficiency loss. The approach is based on disturbance observer and control technique has been divided into two sub-control blocks namely proportional-integral for position errors and backstepping technique for velocity errors. It has been observed that with all disturbances there had been delay in the predicted and theoretical accelerations during thrust rises from 2400 revolutions per minute (RPM) to 3200 RPM. Whereas in the presence of payload of 200 g a steady state error of 2% is also observed and by introducing the integral item cii = 0.5, further overshoots are observed in the response. This integral item is introduced to minimise the steady state error but as soon as the payload is released, the overshoot increases up to 15%. Operating this quadrotor for long distance it has been observed that the steady state error for speed is 8% with active wind speed of 4 m/s. In case of rotor failure, one of the rotor’s efficiency was reduced up to 20% and it behaves similar as in case of payload. The brief summary is highlighted in Table 2.
Summary of PI and BS based NDO technique. 18
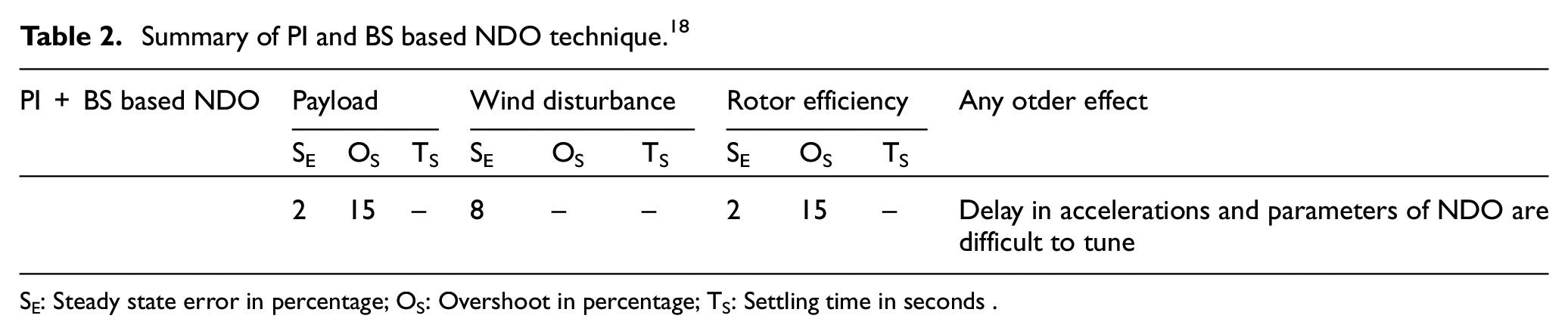
SE: Steady state error in percentage; OS: Overshoot in percentage; TS: Settling time in seconds.
Second technique proposed, is based on dual loop integral sliding mode control (DL-SMC) based linear extended state observer (LESO). 23 This technique proposes formulation of uncertainties within the kinematic and dynamic model of underactuated quadrotor. Whereas the LESO estimates the smooth uncertainties brilliantly. Hence, with an addition of hyperbolic function LESO has been enabled to estimate the non-smooth uncertainties too but with the addition of this function with SMC, the steady state error and chattering increases. The integral term does not significantly improve the responses. The summary is provided in Table 3.
Summary of DL-SMC based LESO technique. 23

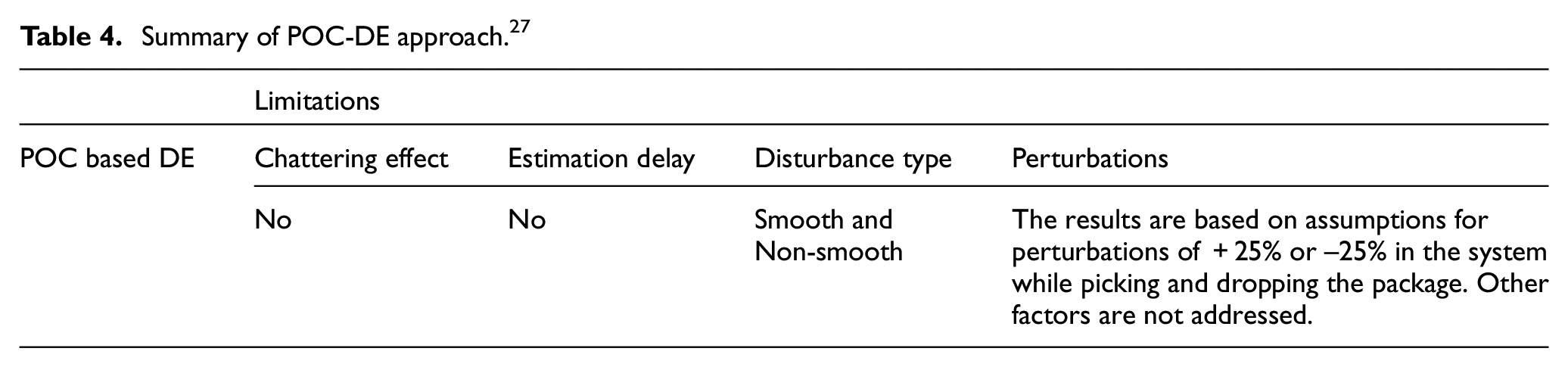
Summary of POC-DE approach. 27
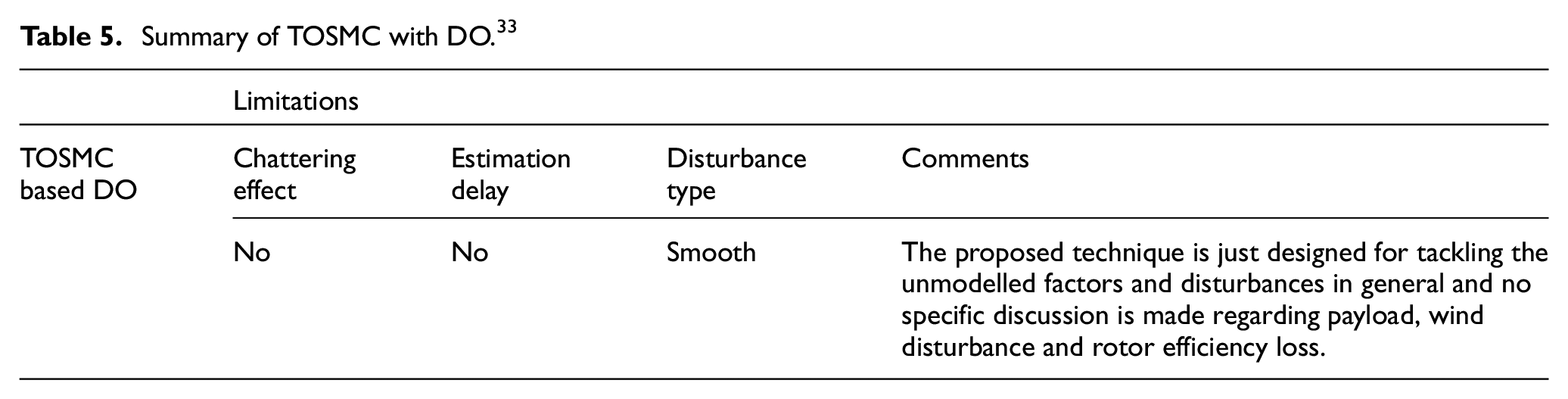
Summary of TOSMC with DO. 33
Third paper, 27 is based on Predictive optimal control (POC) design with the use of disturbance observer. The predictive controller is formulated with a problem of non-smooth disturbance of payload pick and drop case. The scheme provides robust tracking performance by assuming the [+25 to −25] perturbations. There is still room for exploring the algorithm for further perturbations since in Dong et al., 18 the work has been done for three unmodelled disturbances and during picking and release of payload with huge perturbations 10% to 15% overshoots are examined already. Moreover, POC provides easy tuning of the parameters of disturbance estimator.
Third order Sliding mode control (TOSMC) 33 is used with quaternion approach to address the singularity problem and by using high order and low-pass filter for control signal the inherent issue of chattering is removed. The proposed technique is just designed for tackling the unmodelled factors and disturbances in general and no specific discussion is made regarding payload, wind disturbance and rotor efficiency loss.
Technical analysis and discussion
Unmodelled dynamic factors and exogenous disturbances with underactuation in quadrotor like unmanned aerial vehicle (UAV) leads it to instability. The proposed techniques provide comparatively fine results within close and open environment including single flight mode and bounded perturbations only. There is still a need to evaluate the estimator or observer performance with suitable control design for robust trajectory performance in terms of delay in accelerations, chattering effect and transient-steady state issues. Critically observed that it is very difficult to tune the parameters of disturbance observer that provides comparatively better results than the extended state observer (ESO) for smooth and non-smooth variations. Furthermore, with an inclusion of hyperbolic tangent functions, ESO becomes suitable for the same case, but this technique estimates the factors with a bit delay that limits UAV for soft manoeuvres only. For control design being amalgamated with observer or estimator, it is observed that dual loop SMC or higher order SMC is highly recommended for above case but here one should compromise either on settling time or steady state error. The higher order SMC addresses the issue in Sanwale et al. 33 smartly but discussion of three unmodelled dynamic factors and exogenous disturbances in lumped form is not available. Simultaneously, POC-DE technique is limited to payload variation case only with bounded perturbations.
Thus, this manuscript comes up with further evaluation to address above issues with three frequent unmodelled dynamic factors individually and combinedly such that payload variation, wind disturbance and rotor efficiency loss in open environment for multiple flight modes.
Research motivation
By reading this review paper, one may know the importance of unmodelled dynamic factors based on several modelling approaches. One may include lumped unmodelled dynamic factors in their respective underactuated quadrotor mathematical models to exhibit the real behaviour. Furthermore, all observer-based designs are needed to evaluate further with some predictive learning algorithms for lumped unmodelled factors to obtain comparatively better response.
Based on the discussion so far, this paper comes up with a hypothesis that there is an immediate need to improvise the observers either by hybridising them with any predictive algorithm or may use two hybrid observer designs as proposed in Escobedo-Alva et al. 35 The simple understanding can be obtained from the proposed work in Escobedo-Alva et al., 35 where the regulated output is provided to achieve the robust tracking performance of quadrotor with a continuous altitude signal coming from global positioning system (GPS).36,37 One may see the sporadic signal loss due to system malfunctions, obstacles between receiver and satellite signals and above all due to unmodelled dynamic factors. This problem of sporadic signal loss is solved by proposing two hybrid observers-based technique as shown in Escobedo-Alva et al. 35
Since now and to the best knowledge of authors, the suitable method to accommodate the payload variation is the Predictive Optimal control (POC) based Disturbance Estimator (DE) 27 hence with this technique if one may use such POC based DE in either cascaded or parallel form just like in Escobedo-Alva et al. 35 then it may work beyond the perturbations of ±25%. This may resolve the issue for payload variations and wind disturbance. For the robust performance during rotor’s efficiency loss one may hybridise the observer scheme with higher order sliding mode control design as it provides less average error in comparison with Model reference adaptive control and Model predictive control (MPC) technique. 36
Similar approach has been observed in de Jesus Rubio et al. 37 where the proposed strategy is divided into to control system that is, position control and attitude control system, each control system is further sub-divided into fast and slow loops for angular and translational velocities. In these sub-control blocks author recommended the use of model predictive controller (MPC) with sliding mode disturbance observer design to achieve the robustness in the performance of quadrotor.
This was linear approach hence one can see an explicit nonlinear model predictive control (ENMPC) based on robust sliding mode estimator technique, proposed in Zhu et al. 40 to accommodate the external aerodynamic disturbances present within the dynamics of quadrotor. This approach is also recommended in Zhu et al. 40 for formation control design for quadrotor. Since the previous Newton Euler based models were not that complex hence for such models fast scheme of nonlinear model predictive control is suggested along with high gain observers. 40
The same technique is used in several ways for the performance evaluation such as in Miladi et al. 41 where nonlinear information model predictive control (NIFMPC) is proposed for the attitude stabilisation of a UAV in the presence of an external wind disturbance. The fuzzy set of rules are embedded with NIFMPC to address the constraints of control input but due to this process time increases hence UAV cannot perform aggressive manoeuvres.
Paper focuses on hybrid observers because this is one of the ways to address the issue of unmodelled dynamic factors. Researchers provided several methods where they used disturbance and extended state observers-based control laws to cope up with the cable suspended payload smooth and non-smooth disturbances. 42 One should study and evaluate the mathematics so that it can also work for unbounded variation with partially known information. Researchers also proposed B-spline artificial neural networks with online disturbance estimation for a quadrotor unmanned aerial vehicle where the linear extended state again estimates the external disturbances.39,42
The Table 6 is formulated using the basic understanding of predictive control optimisation method with nonlinear disturbance observer technique as proposed in Wang et al. 27 By amalgamating it with any robust or adaptive control design, the better performance can be obtained. The measured and hypothetic parameters are shown in Table 6.
Measured and desired performance of quadrotor.
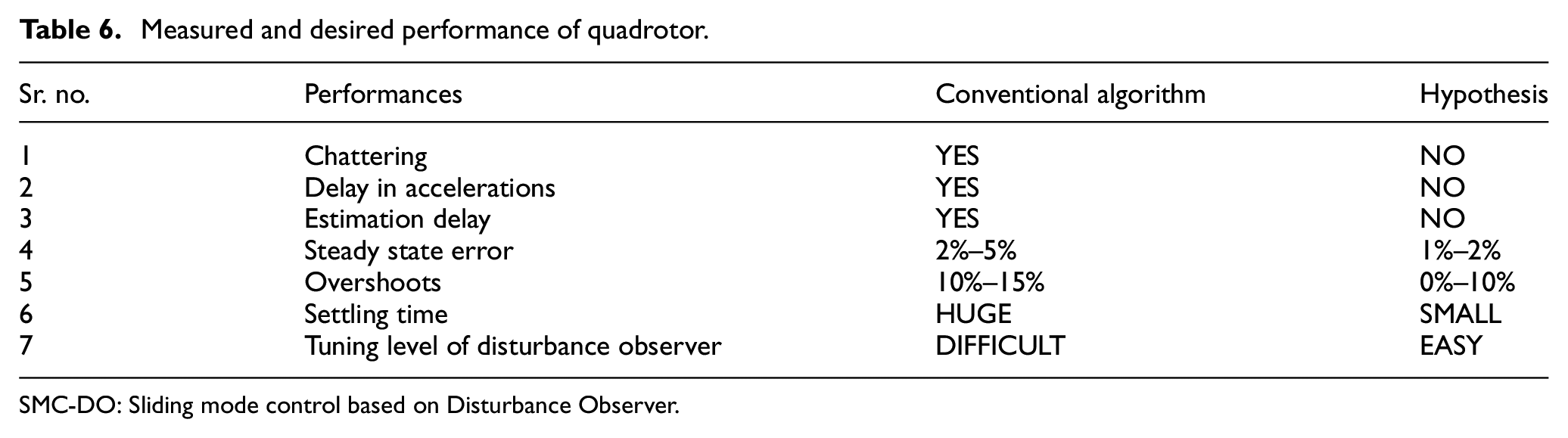
SMC-DO: Sliding mode control based on Disturbance Observer.
In the above Table 6, it summarises the performances of current conventional algorithm with the hypothesis suggested by this review. In this table, the steady state error and overshoot percentage is computed using integral square error method as stated below:

where is the error rate which can be used separately for computing the steady state error and overshoots. In additions to this, MATLAB also provides built-in commands to find or compute the integral square error.
Conclusion
This draft proposes the need of acquiring more realistic quadrotor model using Euler formulation technique either quaternion method with three lumped unmodelled dynamic factors such that wind disturbance, payload variation and rotor efficiency loss. Moreover, proposes a need of predictive algorithm-based observer design methods fused with robust control designs to compensate the compromising responses such that delays in rate of change of velocities, unnecessary high oscillations, sudden overshoots and large settling time to do aggressive manoeuvres.
Supplemental Material
Revision_table – Supplemental material for Effects of unmodelled dynamic factors on an under-actuated quadrotor: A review of hybrid observer design methods
Supplemental material, Revision_table for Effects of unmodelled dynamic factors on an under-actuated quadrotor: A review of hybrid observer design methods by Ghulam E Mustafa Abro, Vijanth Sagayan Asirvadam, Saiful Azrin Bin Mohd Zulkifli, Abdul Sattar, Dileep Kumar and Ali Anwer in Measurement and Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.