
Abstract
This article reviews remotely operated underwater vehicle (ROUV) and its different types focusing on the control systems. This study offers a brief introduction of unmanned underwater vehicle (UUV) together with ROUV. Underwater robots are designed to work as an alternative to humans because of a difficult and hazardous underwater environment. The applications and demand of marine robots are increasing with the passage of time. There are several research articles and publications available on these topics but, a complete review of old and recent research about this technology is still hard to find. This article also assesses some recently published research papers on underwater systems. It presents the comparison of different control systems and designs of underwater vehicles. There have been major developments in marine technology depending on the needs, applications and cost of different missions. Scientists design many remotely operated vehicles based on the educational or industrial purposes. This article is presented in order to help and assist the future researchers as a massive review of the field of remotely operated underwater vehicles and their possible future developments are presented.
Keywords
Introduction
In the last few years, many researchers have shown their interest in studying and exploring the underwater environment. As the interest increased, the demand of an unmanned underwater vehicle (UUV) also increased. 1 These vehicles operate underwater without humans onboard and are also known as underwater drones. 2 Based on the shapes and operation, UUVs are divided into two kinds; autonomous underwater vehicle (AUV) and remotely operated underwater vehicle (ROUV). 3 The main difference between these two types are that an operator controls the ROUV while AUV operates independently. 4
ROUVs have become substantial for the applications like surveillance, patrolling, and for industrial applications, for example offshore exploration of oil and gas. 5 Station keeping and position stalking are the two main features of these vehicles. It means that vehicle maintains the same position with respect to its structure all the time. 6 It also has applications in the exploration of deep waters which is out of reach for humans. 7
It is very important to construct and configure the robot or vessel in a cost-effective manner. 8 The pressure increases with the depth of the water which negatively affects the stability of the underwater vehicle. The control system of the vehicle avoids the disturbances (drag effects, ocean currents) and obstacles. 9 The position and orientation of actuators on vehicle, control surfaces, and shape of vehicle are some constraints that limits the control independence. 10
Due to aforementioned factors, it is difficult to keep the vehicle on the required path and complete the underwater mission. Optimizing the control system of the vehicle is crucial because it reduces the time and the cost of the mission. 11 Similarly, the allocation of the actuators on the vehicle must be in accurate position that leads to the precise movement and efficient usage of the energy resources. 12 The control systems with good performance under these constraints attain a high degree of autonomy. 13
Previously, many researchers contributed in modeling, designing, and construction of ROUV with a gripper. These types of vehicles have a capability to grasp the target object underwater. 14 The mechanical structure of ROUV consist of actuators, camera, gripper, and sensors. The additional equipment are electronic modules and suction arm. 15 In these types of systems, a cable connects the operator and vehicle. The underwater vehicle is powered from the control surface platform. 16 The under-actuated system cannot achieve complete control over its dynamics because of deep underwater restraints. Therefore, ROUV with perfect design and controller is required for the completion of underwater scenario. 17
Moreover, equipment and sensors used in ROUV impact the dynamic behavior of the system. 18 Some applications of ROUV requires precise position and navigation capabilities. These types of vehicles achieve these capabilities by fiber optic gyro based on inertial navigation system (INS). 19 There are many controllers that have been designed previously for underwater vehicles including sliding mode control, proportional integral derivative and adaptive robust control. 20 Nowadays, the community of underwater robotic technology is actively trying to model, design, and construct the smart ROUV. 4
The major contributions of this research are: (a) comprehensive review of different designs of ROUVs and their applications; (b) detailed discussion of the various classic and novel control models for ROUVs; (c) evaluation and assessment of the state of the art research on ROUV; (d) analysis of the under-actuated and actuated designs of the ROUV and their merits and demerits.
The rest of the article is organized as follows: section “Literature review” reviews the present literature on the underwater vehicles. Section “State of the art” offers the state of the art research on ROUV. Section “Review of recent research on ROUV” compares and discusses some of the recent research on underwater vehicles. Section “Review of control systems and operation modes” introduces different control systems and discusses operation modes of ROUV. Section “Review of different models and designs” mainly focuses on the development and design requirements of ROUV. Section “Conclusion” concludes the whole research.
Literature review
Underwater vehicles are pilotless and non-maintained robots that are able to perform underwater operations either by wired communication or via on-board computers. Moreover, the concept of underwater vehicle is not a new one. 21 The thought initially started in the late 90s when the Royal Navy used the word “Cutlet” for a remotely operated underwater robot which recovered the torpedoes and mines. 22 The sequential development in ROUV technology and the overall the progress of ROUV technology from simulation level to the prototype and to the commercialization from modelling of single robot to multiple ROUVs are briefly discussed here.
The development of underwater robots started in 1950s. Dimitri Rebikoffin created the first fully developed underwater robot called POODLE in 1953. The expansion of these vehicles began in 1970s, until then, these robots were only used for transferring, gathering of data. From 1970 to 1980, research on potential ROUVs expanded. The first actual machine designed in USA called Torpedoes was developed but it was only used for experimental purposes. 23 In this era, many test benches were constructed and considered for the exploration and research on this technology. The experimental and theoretical growth on ROUV took place in this era. From 1980 to 1990, many failures and successful tryouts were carried out with prototypes. 24
In this era, the aforementioned experimental and theoretical procedures were executed in real time in fields. Darpar lab in USA constructed almost all these prototypes. This era is also known as the era of designing and development of ROUV. 25 1990 to 2000: this period was called as first generation ROUVs because of goal fulfilling technology development. The designed and developed ROUVs in this era were able to complete tasks on time and achieved all its goals. 26 Many institutions and organizations were able to construct these robots. This progress opened the doors for commercialization of these underwater vehicles. 2000 to 2010: in this era, the true commercialization of ROUV took place.27,28
Many different companies failed to design and construct this technology according to market demand. In this decade, a drive from theoretical to manufacturing of ROUV took place. The main issue hindering the total commercialization was the unaffordability. Another direction of this technology was cooperative control of ROUVs which also gained steam in this era. 23 From 2010-forwards: in the previous decade, a few theoretic characteristics on co-operative control of ROUVs developed. During this era, the scientists implemented the cooperative methods practically. Likewise, these robots are constructed on a commercial basis.
Figure 1 explains the different categories of underwater vehicles. First, they classify either as manned or unmanned. Then, for unmanned underwater vehicles, we could have AUVs (non-tethered) or ROUVs (tethered). Again, there are mainly two types of ROUVs: observation class and working class. 29
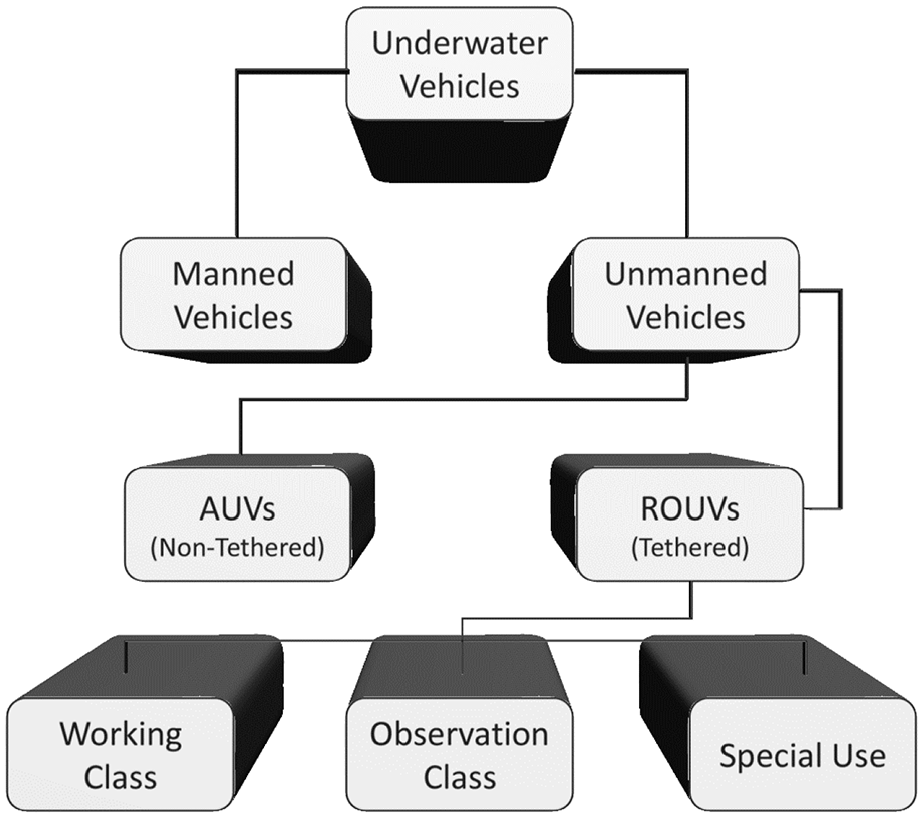
Underwater vehicles categories.
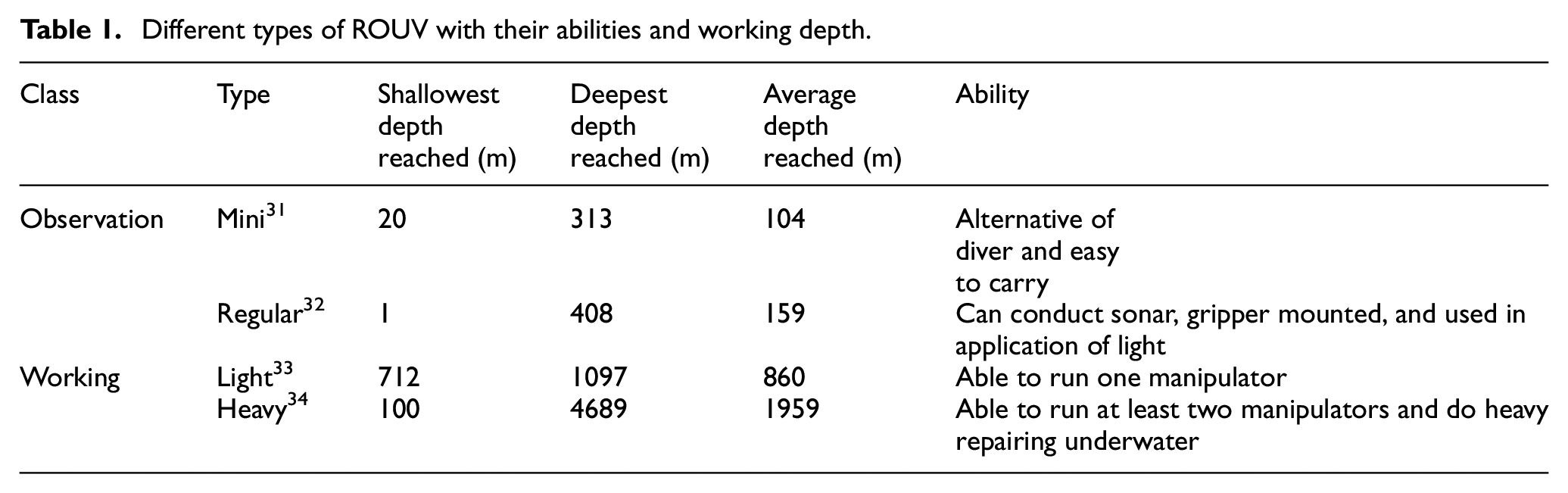
Table 1 discusses the different types of observation and working class ROUVs. Working class is bigger in size with more power and payload capabilities but also has a high cost. Working class is mainly used for underwater repairing. 30 It can carry loads of around 300 kg and can execute a number of sophisticated underwater tasks. Working class machines can reach the depth of more than 4500 m and can deliver around 220 hp. Working class underwater vehicles come with an assortment of sensors and cameras for data capture and navigation in addition to two manipulators for intervention tasks. Figure 2 shows an example of a working class ROUV.
Different types of ROUV with their abilities and working depth.

An example of a working class ROUV.
On the other hand, observation class is more widely used because of its low cost and extensive applications like inspection and survey. 35 It is considerably smaller than a working class vehicle. It can carry loads of over 35 kg. A range of cameras and sensors can be used with the ROUV as required, which is ideal for regular inspections of underwater structures. It can also act as a supplementary visual support to working class vehicles. Figure 3 shows an example of an observation class ROUV.

An example of an observation class ROUV.
State of the art
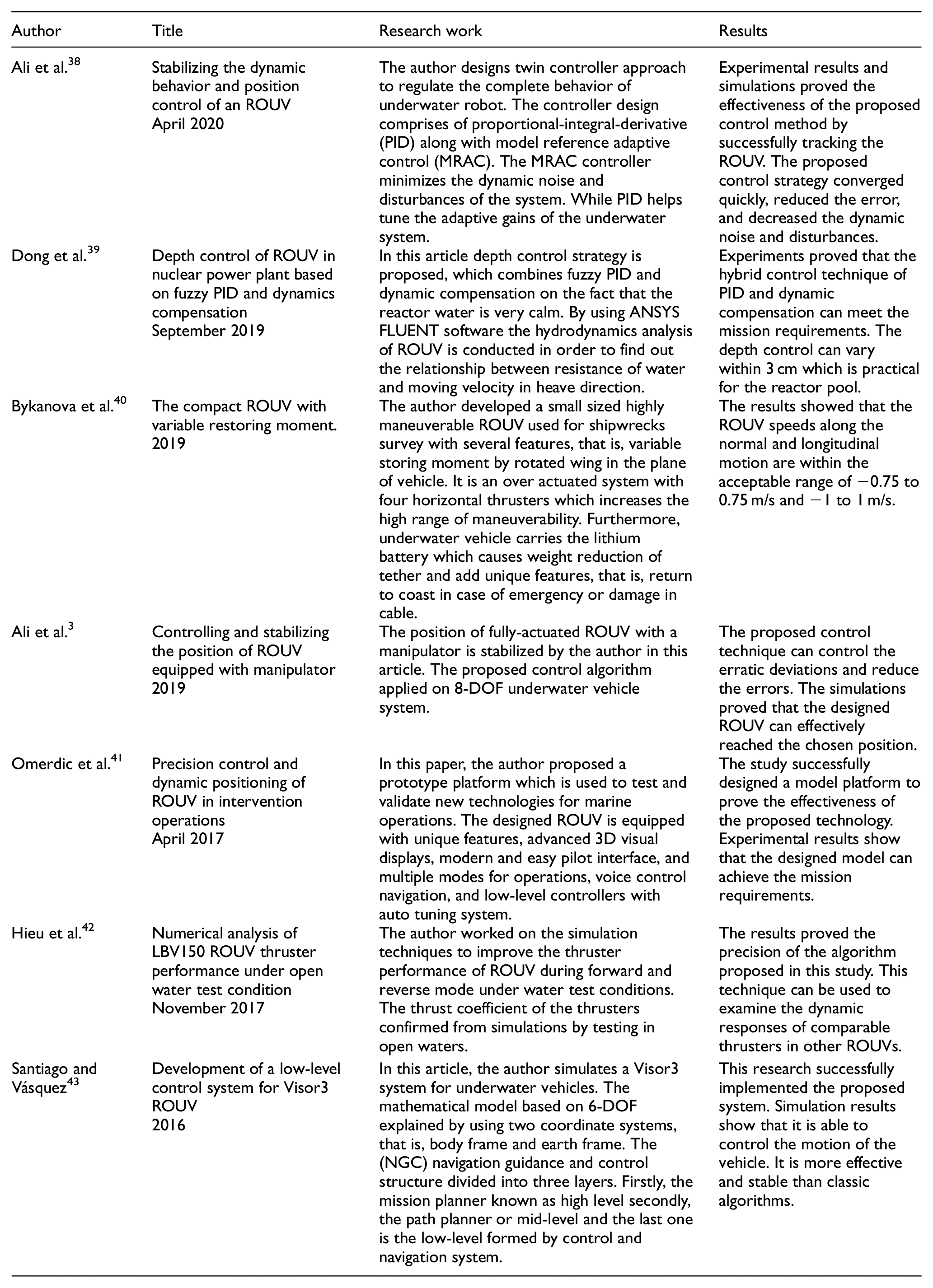
This section presents some of the cutting-edge research into underwater vehicles and their control design. Yan et al. 36 introduces a groundbreaking new system called Human-in-the-loop which is an innovative new technique to help us further explore the untapped resources in the depth of the sea. The paper designs a robust proportional derivative (PD) controller to track the position of the ROUV. This research constructs Lyapunov-Krasovskii functions to study the ROUV stability. Then under specific constraints, the paper demonstrates that the controller is able to stabilize the underwater vehicle. Lastly, the results prove the effectiveness of the proposed algorithm. In another recent research on underwater vehicles, Batmani and Najafi 37 offers a new robust controller for ROUV that can track depth of the ocean. To reduce the communication delay between the ROUV and the controller, the paper designs a groundbreaking nonlinear controller. The results show that the error between the depth of the ROUV and the chosen route reaches zero using the designed controller.
Review of recent research on ROUV
Review of control systems and operation modes
Control systems
A control system comprises of an array of processes that stabilizes the underwater vehicle, so that it obeys the instructions programmed by the operator. Due to the non-linearity, environment disturbances, and plant equations, it is not easy to design the control system of underwater vehicles. 44 Cohan 45 asserts that the control system designing for ROUVs is a contemporary research topic and also has potential for future studies. It is evident from the number of papers being published for the design and development of control systems for ROUVs.
One study 46 applied and verified a control and navigation system for ROUVs using pre-programmed controllers to adjust speed. Another research 47 designed an effective adaptive control mechanism to make sure that a 6-DOF underwater system follows a given route. In one article, 48 researchers offered an assessment of different control methods using neural networks, demonstrating their benefits, shortcomings, and their applications. One researcher 49 proposed a hybrid PD controller for dynamic orientation of ROUVs when the task is performed near underwater infrastructures and needs precise implementation.
Bessa et al. 50 controlled depths in underwater vehicles using a combination of sliding mode controllers and fuzzy adaptive algorithms. One study 51 designed an efficient PID controller to control underwater systems used in oceanic surveys. To track routes vertically, one research 52 developed a robust feedback controller. Another study 53 simplified the traditional fuzzy control method for an underwater system. In one research, 54 scholars offered a decoupled PD set point controller using quasi-velocities for underwater systems. One study 55 offered a vigorous control method for an underwater system that subdues pitch and yaw coupling.
The automatic control of these types of vehicles yields a difficult design due to the dynamics of nature. Controllers based on the simple models have very unsatisfactory performance. In the recent years, the six commonly used control methods for the underwater vehicles are as follows:
(a) Proportional integral derivative (PID): One of the most commonly used control strategy is PID. It is a linear control method that can improve the efficiency of ROUV by using a closed loop control system. 56 One widespread practice is to use a different PID controller for every degree of freedom (DOF) of ROUV to enable autopilot.
(b) Linear quadratic Gaussian (LQG): Linear quadratic Gaussian technique is a linear control strategy which is best suited for undefined systems with additive white Gaussian and the systems with incomplete state information. Field et al. 57 applied this method to the underwater vehicle control problem.
(c) Sliding mode controller (SMC): When dealing with parameter constraints, sliding mode control (SMC) is the best nonlinear control method. The primary disadvantage of the SMC is the chattering effect, which can lead to high frequency modes. They can affect the functioning of the system negatively, and can cause the system to destabilize. One research 58 proposes an SMC without any chatter for controlling the trajectory of ROUVs.
(d) Higher order sliding mode (HOSM): In order to get rid of the chattering effect and enhance the performance, we use HOSM. It is a nonlinear control strategy used for the motion control of the underwater vehicles. 59
(e) Neural network (NN): Neural networks are powerful tools that are capable of approximating numerous linear and nonlinear functions. In many cases, these networks can adjust to varying input-output relations. These NN can also correctly map multivariable functions. They are simple to implement in hardware as well. 48
(f) Fuzzy logic controller (FLC): Fuzzy logic controllers are effective robust controllers with numerous applications. The successful application of FLC to nonlinear, complex, and poorly defined systems makes FLC ideal for use in underwater vehicle control systems. 60
Controlling ROUV is tough because of hydrodynamic effects and parameter uncertainties. The overall control system design problem for underwater vehicles comprise of modeling uncertainties and non-linearities, that is, hydrodynamic non-linearities, inertial non-linearities. 61 Since PID is a simple control technique, it is more commonly used and has implemented successfully on different ROUVs.
Operation modes
Operations modes of an underwater vehicle depend on the mission requirement. Whether we need the ROUV to survey or inspect the oceanic atmosphere or whether we need it to for underwater repairing, there are different operation modes for each. During these several operation modes, ROUV uses a fiber cable and a pulley. It uses a fiber cable to connect the underwater vehicle with the operator. The operator also controls the vehicle through the cable and sends and receives the data from the instruments and sensors.
The underwater vehicles have multiple modes of operation. It can operate on the surface of water as a survey platform towed by the boat as shown in Figure 4(a) or actuated on the surface by the thrusters to perform roll, pitch and yaw as shown in Figure 4(b). While, Figure 4(c) shows ROUV fully submerged in water operating using its thrusters. In this mode, we can control it in 6 degrees of freedom (DOF). Lastly, Figure 4(d) shows the ROUV partially submerged while in tow. During strong currents, underwater vehicles cannot maneuver accurately using its thrusters, therefore, we operate it while being towed by the boat. 41
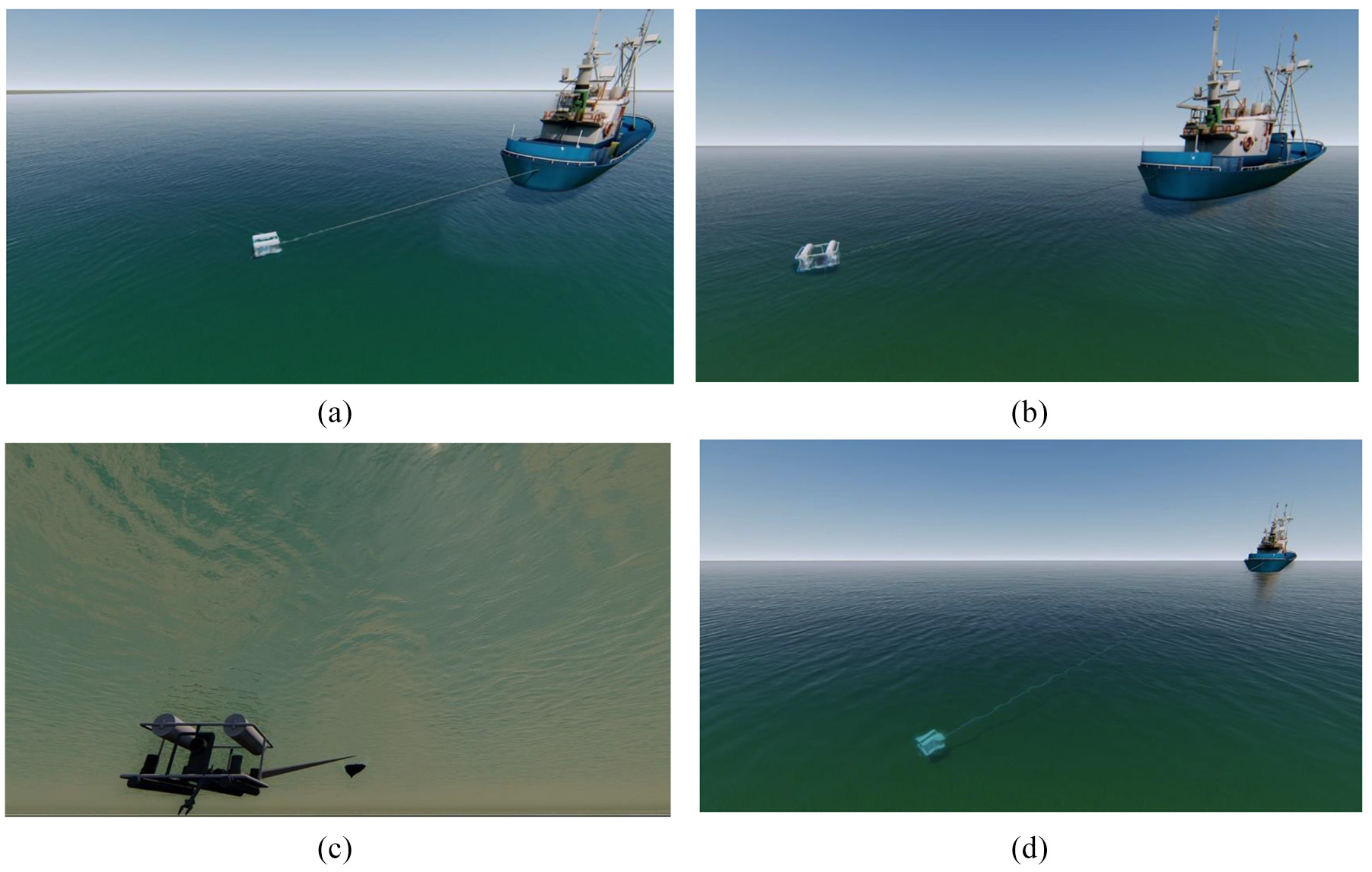
Four operation modes of ROUV. (a) Surface in tow mode. (b) Actuated mode on surface. (c) Actuated ROUV submerged. (d) Submerged ROUV in tow.
Review of different models and designs
For underwater applications, commonly the size of ROUV is small. The main task of the vehicle is to grasp the object underwater and to give a basic visual inspection of the platforms. These types of vehicles are equipped with the actuators for controlling the direction, a sensor to collect the underwater data, a manipulator to grasp the object underwater and camera for the real time monitoring. Joystick is used to control the movements of the vehicle. An underwater cable connects both the vehicle and joystick. These types of vehicles may be wired or wireless. Wired systems have greater efficiency and control mainly due to no lag in the communication system.
Underactuated models
First model
This model consists of the main controller, that is, Arduino Mega through which drivers of the motors/pumps are connected and controlling of motors/pumps takes place. Sensors such as barometer, ultrasonic sensors are also connected to the controller. Manipulator used for grasping object underwater, is also connected to the controller. Remote control (RC) is used for the input signal. Lastly, the controlling of manipulator takes place through the MATLAB where image processing takes place and the signal is transmitted and received from ground to water through the RF module. The Figure 5 shows the prototype used in this under actuated system.
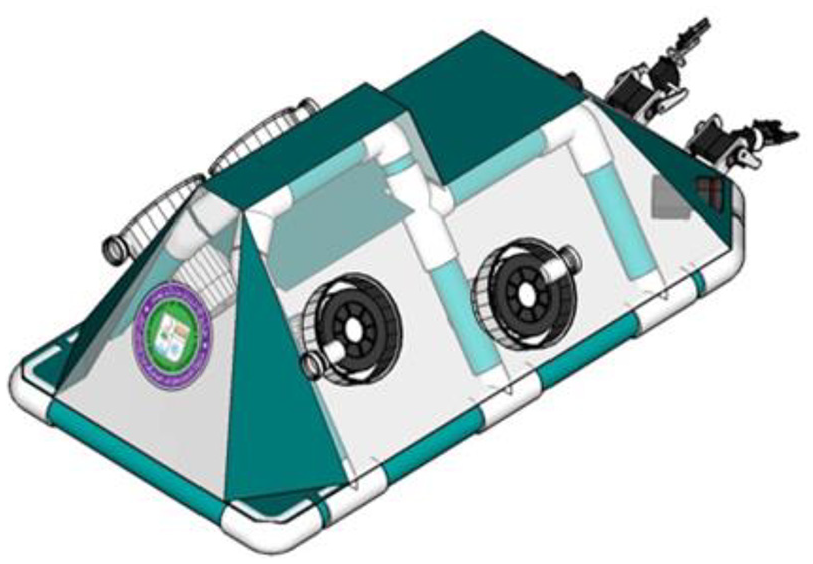
First under-actuated model.
Second model
This system contains the main controller, that is, Arduino UNO which controls the actuators on the basis of data it gathers from sonar, pressure, and electric current sensors. The gripper mounted on vehicle used for grasping object underwater take input signal from the joystick based on image processing thorough MATLAB, which receives visual data from IP camera. The joystick is used for the input signal to control the movements. Figure 6 presents the prototype used for the second under-actuated model.
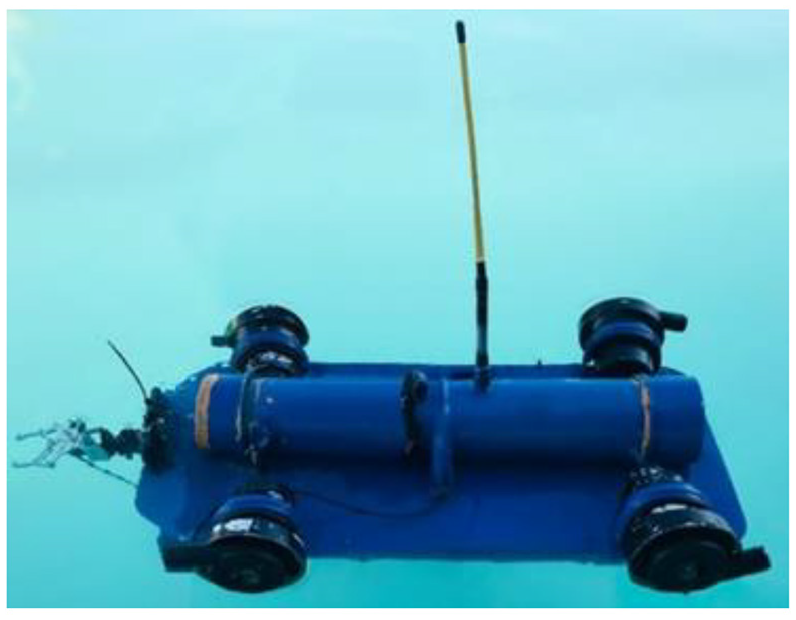
Second under-actuated model.
The main defects of the aforementioned two under-actuated models are communication issues, waterproofing, and controlling issues. Moreover, the IP-camera do not work properly in the depth of water. They classify as under-actuated systems because of having fewer actuators than the degree-of-freedom. Due to totally wireless system, they faced lag in communication as well.
Actuated model
Above Figure 7 presents the control diagram of the actuated model. The joystick sends the signal to controller connected via connector. As the controller receives the signal, the stored program reads the command and perform the task according to the pre-programmed instructions. Microcontroller controls the actuators for the precise movement of the ROUV. IP camera is connected through the MATLAB GUI to an Arduino UNO and the data from the sensor is prepared. The controller also controls the manipulator to grasp the object. The Figure 8 shows the model used for this actuated system.
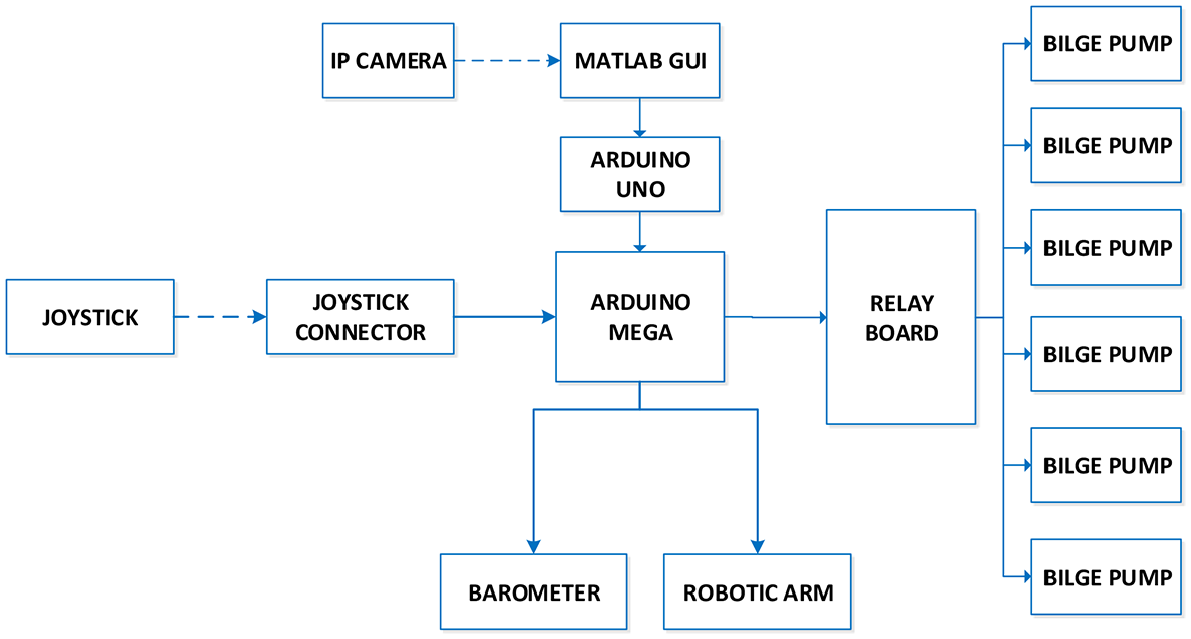
Control diagram of the actuated model.
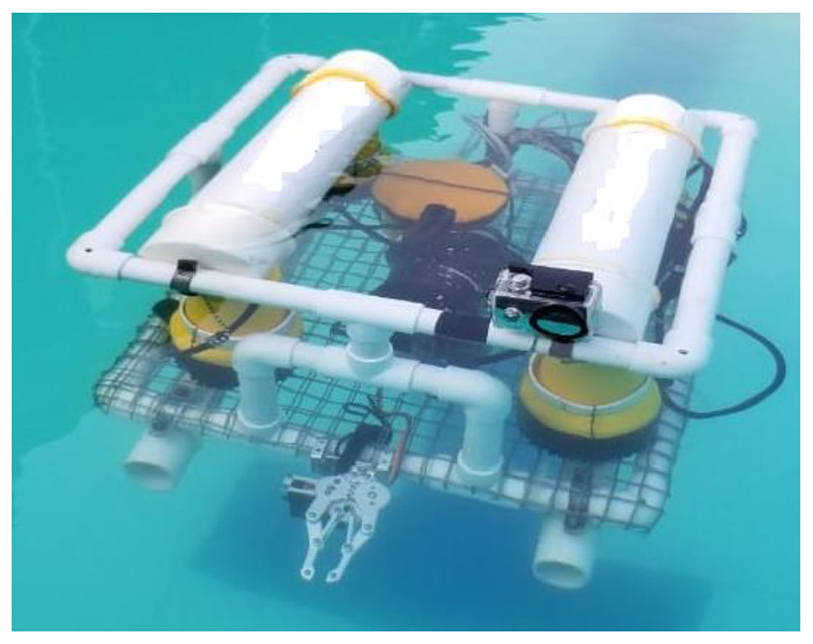
Actuated model. 3
The actuated system is much more efficient than under-actuated systems in terms of stability and controlling. The system consists of six bilge pumps working as thrusters, four of them with thrust power of 1100 GPH are for roll and yaw movements, and remaining two 1500 GPH are for pitch movements. The body is equipped with waterproof circuitry, live streaming camera and an electronic gripper. This system performed well due to wired connection, which minimizes data loss and increases efficiency. Joystick controls the gripper with the help of visuals it receives from camera, rather than the image processing mechanism.
Comparison of different designs of ROUV
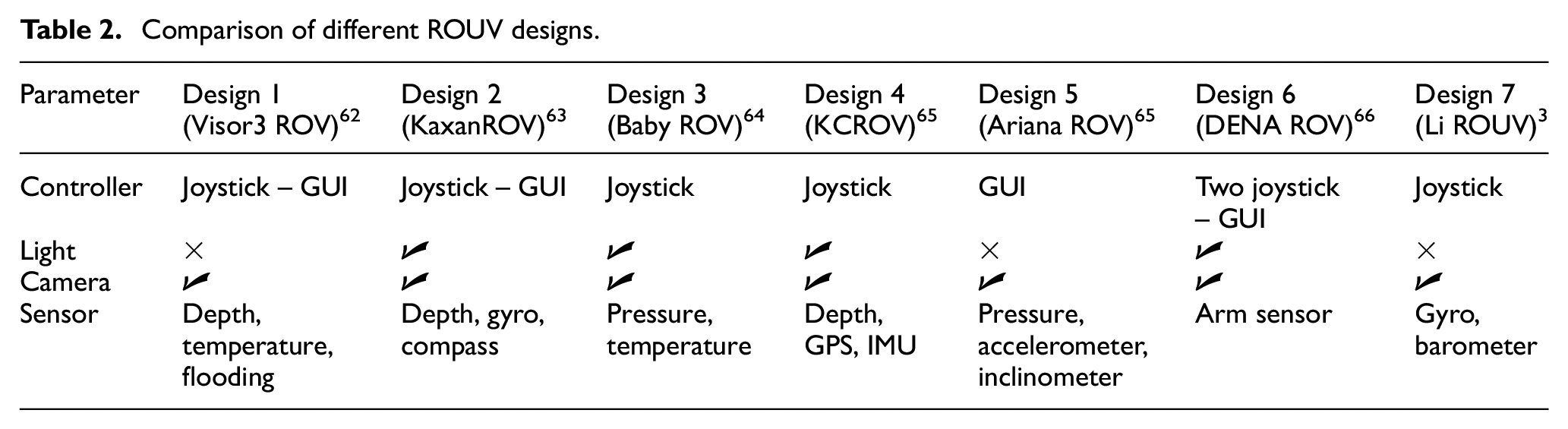
In the last few decades, many ROUVs have been designed and constructed for observation, monitoring and for working purposes as well. 42 This section compares different designs of ROUV with regards to different controllers and sensors. Each design has its own control system depending upon their purpose. The main difference between two classes of ROUV is weight and control system. Table 2 provides the comparison between different ROUV designs.
Comparison of different ROUV designs.
Design requirements
After considerable research and experiments, following are the requirements which the scientists have identified and kept in mind before starting the design phase of the underwater vehicle.
The body structure should be strong enough to bear all the hydrodynamic forces, pressures, and temperature and it should accommodate all in-depth and surface activities.
It should be able to deploy and control from small vessels on surface, trawlers.
The input signal should be given to the vehicle through a cable from a joystick at the surface.
The robot should be able to provide a clear vision of the depth via live streaming system with hi-tech lights.
It must be able to hold the given position and orientation through a precise controller.
If it is equipped with a gripper, then it should be able to grasp an object from the depth with utmost accuracy.
Conclusion
This paper presented a complete overview of recent research and trends in ROUV technology. Supporting structures of the robots to perform different tasks were described with their applications. This study also provided a brief overview of different the control methods for ROUV including proportional integral derivative (PID), linear quadratic Gaussian (LQG), sliding mode controller (SMC), and higher order sliding mode (HOSM). Moreover, this study compared and analyzed some recent research experiments on these vehicles. Future prospects include novel intelligent control techniques where new control schemes will be introduced for better stability and controlling. Each scheme has advantages and disadvantages based on the mission requirements. This paper also presented the detailed comparison of different designs of ROUVs and also discussed their development. The review provided the idea to design the system in terms of controller, sensor, and communication system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Key research project of Xi’an AERONAUTICAL POLYTECHNIC INSTITUTE (No.: 19xhsk-002) and Scientific research project of Education Department of Shaanxi Provincial Government(No.: 15jk1381).