
Abstract
In this article, a dynamic output feedback based sliding mode learning control is proposed for uncertain mechanical system. After giving the model of uncertain mechanical system, the uncertainty and disturbance of it are discussed and they are assumed to be mismatched. The velocity of the uncertain mechanical system is assumed to be unmeasurable, and then a dynamic output feedback control strategy is utilized here. A dynamic output feedback-based sliding surface is constructed. The parameters of the designed surface are solved by Lyapunov function approach. Then a sliding mode learning controller is proposed for uncertain mechanical system to overcome the chattering of traditional sliding mode control. Finally, a numerical simulation is given to show the effectiveness of the proposed controller.
Introduction
In actual production process, a lot of industrial system can be represented by a mechanical system, such as active suspension of vehicle, 1 serial robot arm, 2 vessel-riser system, 3 planar three-link mechanical system 4 and rotational mechanical system. 5 For the successful application of industrial system, the controller design of mechanical system has drawn much attention in recent years.6,7 However, for an actual industrial system, a specific sensor is needed if we want to get a certain variable, for example, a velocity sensor is need if we want to measure the velocity of the industrial system timely. Unfortunately, adding a specific sensor to the industrial system will certainly increase the cost. Simultaneously, the velocity information measured by the sensor is often affected by noise, so it is inconvenient to be applied directly. If we can design a controller without the sensor of velocity, the cost of the industrial system will certainly decrease, and the control performance will be improved. In this case, output feedback based controller design method is an effective way for the control of mechanical system.8–10
Because of the change of working environment and the existence of various external disturbances, uncertainty and disturbance are inevitable in mechanical system; in this case, a robust controller is needed. Sliding mode control (SMC) is a kind of robust control since it has great robustness for system disturbance. 11 For the controller design of SMC, a reduced order sliding surface is constructed first in which the reduced dynamics are stable. Then a discontinuous control law, which can force the system dynamics to the sliding surface, is designed. Based on the designed sliding surface and controller, the controlled system is unaffected by the disturbance. 12 SMC has been applied to the robust control of uncertain system, such as adaptive control of hypersonic flight vehicle 13 and active suspension vehicle systems, 10 adaptive control of fuzzy system,14,15 and sliding mode control of master-slave time-delay systems. 6 Output feedback based SMC has also been widely studied, such as static output feedback (SOF) based SMC,16,17 and has been successfully utilized in Markovian jump systems 18 and affine nonlinear system. 19 But the information of SOF based SMC is one-sided, and partial states of the original system is missed. In this case, dynamic output feedback (DOF) based SMC is needed.
Meanwhile, when utilizing SMC, the upper bound of the interference is assumed to be known. 20 While for a real system, the interference and uncertainty are difficult to be modeled or measured. 21 An effective way for this question is choosing a big enough upper bound for the interference and uncertainty, but this will cause chattering in the control input. 11 Chattering is an obvious shortcoming of SMC, and is harmful to the stability of practical system, so it must be avoided or at least reduced. For reducing chattering, a lot of results have been listed in literature, such as adaptive law based SMC,22,23 but in real application, chattering is still an open problem, and is the main difficulty for the application of SMC. In this case, a novel DOF based SMC, which can greatly reduce the chattering of traditional SMC, is needed for the control of mechanical system.
Recently, sliding mode learning control (SMLC) has been proposed and successfully applied on the controller design of uncertain system. 24 Similar with traditional SMC, a sliding surface is first constructed, and it’s stability is guaranteed by correctly selecting the parameter of the sliding surface. Then, a learning controller is introduced. The learning controller can greatly reduce chattering of traditional SMC on the basis of guaranteeing SMC’s robustness, so it is more practical in real application. 25 But for the output feedback based SMLC, there are really few results can be found in literatures, let alone DOF-based SMLC. So for the control of mechanical system, a novel DOF-SMLC should be proposed first.
Motivated by the above discussions, a DOF-based improved SMLC is proposed for the robust control of mechanical system in this paper. An uncertain model of mechanical system is proposed first, and then the model is transformed into a standard one, more specifically, a linear uncertain system with disturbances. A DOF controller is designed, then a DOF-based sliding surface is designed and the stability of it is guaranteed by selecting parameters appropriately. After getting the sliding surface, a learning controller is proposed for the uncertain mechanical system. Finally, a solving algorithm is given for the proposed DOF-SMLC. The proposed DOF based SMLC is confirmed by a numerical example.
The novelties and main contributions of the paper can be summarized and listed as:
For an uncertain mechanical system with unknown parameter uncertainty and disturbance, a learning controller is designed.
A DOF-based sliding surface is proposed for uncertain mechanical system;
A novel SMLC is proposed and the proposed controller can greatly reduce the chattering of traditional SMC.
This paper is organized as follows. The uncertain mechanical system model is listed in section “Problem Formulation,” and the main results are given in section “Main Results.” Numerical simulation results are given in section “Simulation results.” This paper is summarized in section “Conclusion.”
Problem formulation
Model of mechanical system
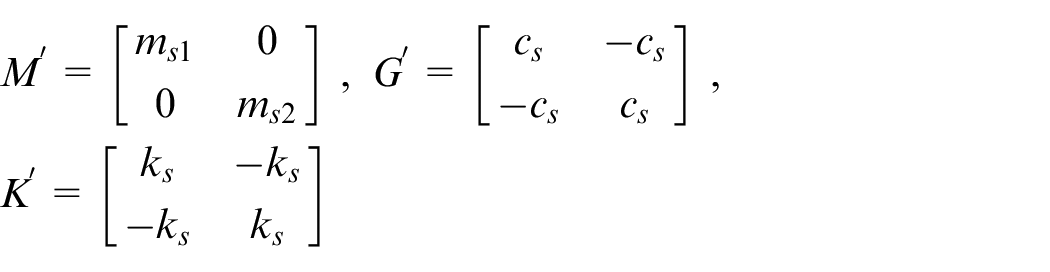
The mechanical system considered in this paper is a 2 degree-of-freedom mechanical system, and a sketch of the mechanical system is given in Figure 1. The system equation described in physical coordinate is listed as following:

where


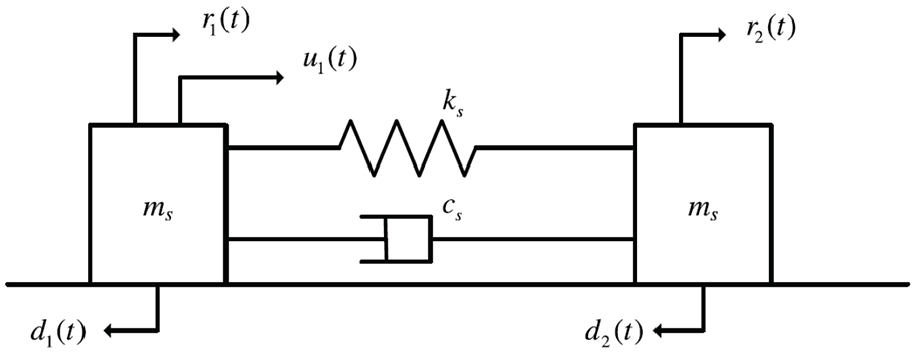
Geometry of the mechanical system.
In equation (1),
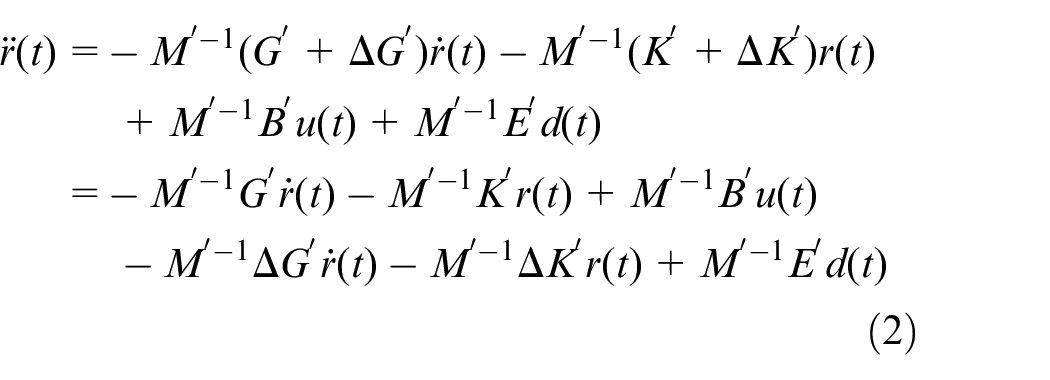
For mechanical system model (2), choosing the state as

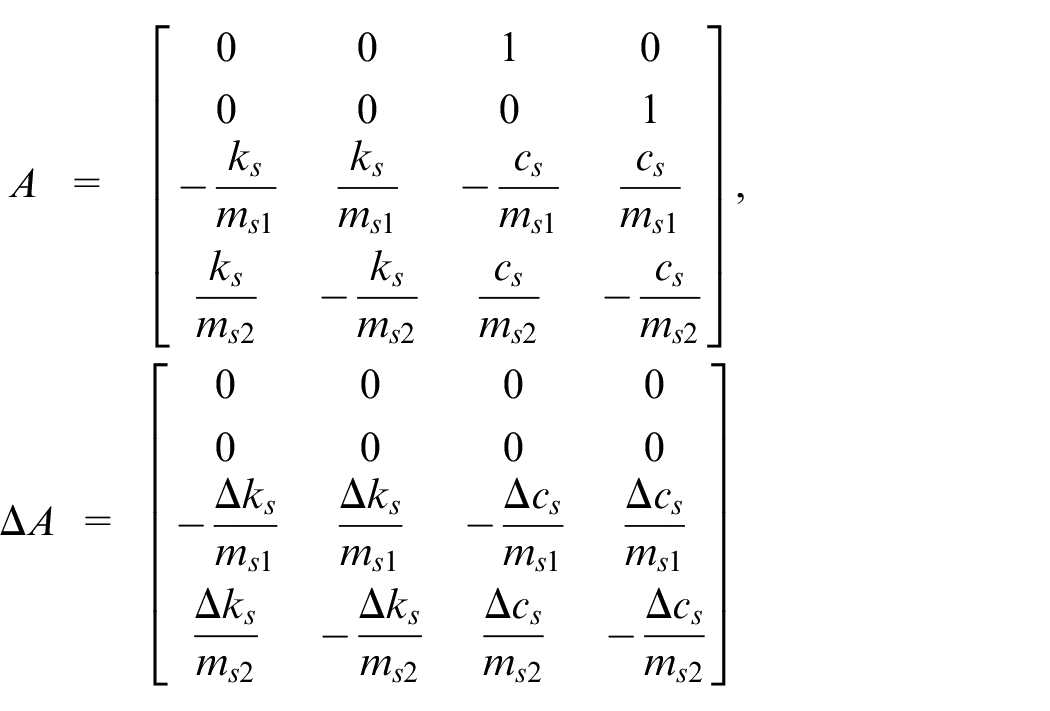
then system (2) can be rewrote as

where
Control objective
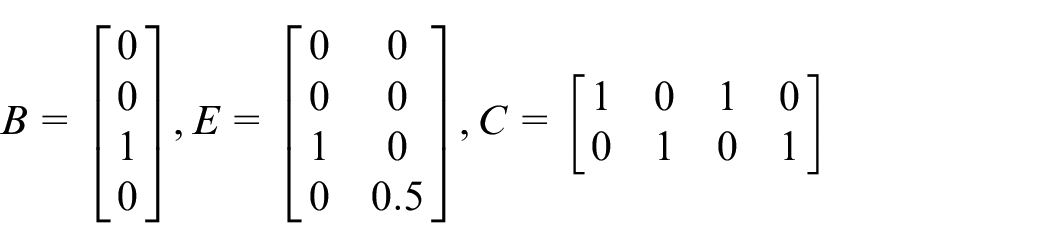
For the original system equation (1), assuming that, the measurable output of the system (3) is

then the equation of mechanical system can be summarized as

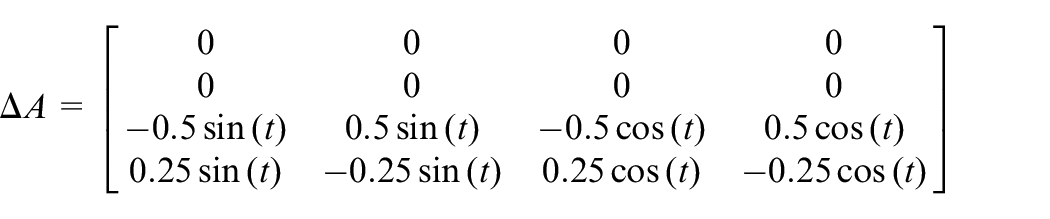
For the uncertain matrix
Assumption 1

where
Assumption 2

Remark 1
In Assumptions 1 and 2, the unbound of
Considering the existence of
Main results
Since only the output of equation (4) is measurable, output feedback-based controller design strategy is utilized here. Also considering the robust requirement for uncertainty and disturbance, SMC strategy is utilized here. In this case, DOF-based SMC approach is utilized here for the robust controller design of mechanical system.
DOF based sliding surface design
For system equation (4), a full-order DOF controller is constructed as

where

where
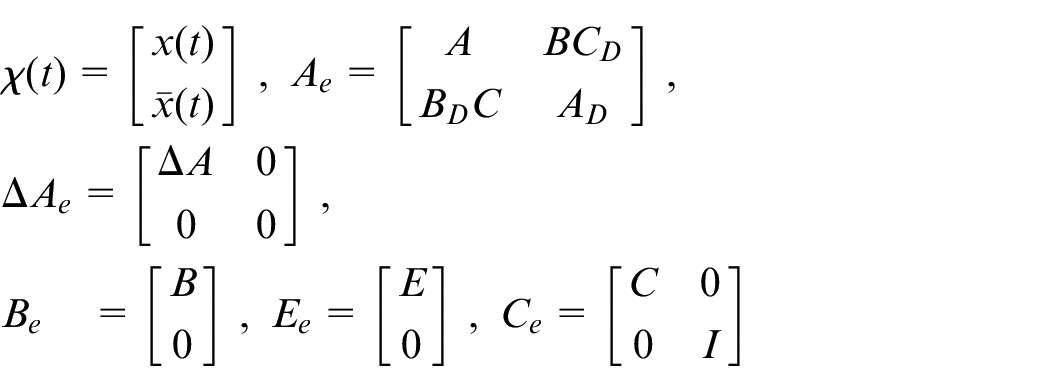
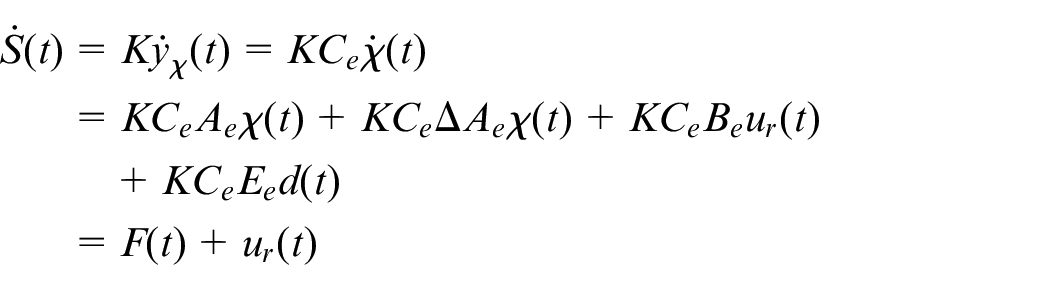
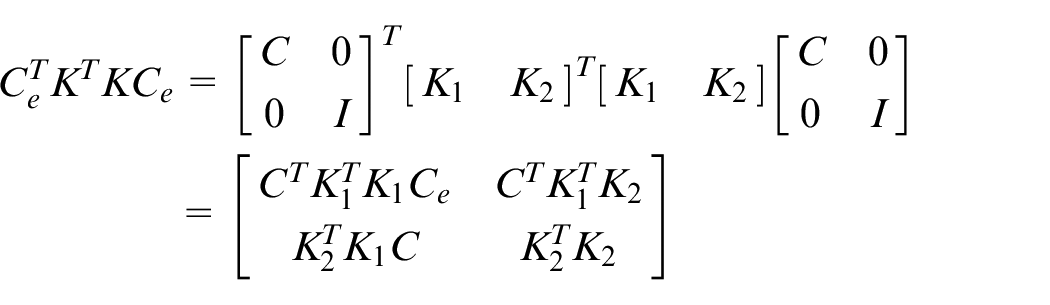
Then, the control of equation (4) is converted into the closed-loop stability of equation (6). According to the SMC designing strategy, an output feedback based sliding surface for equation (6) is defined as
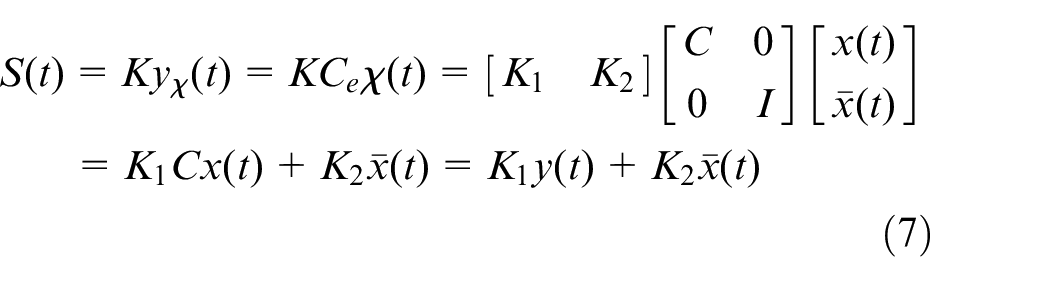
where
For system (6),
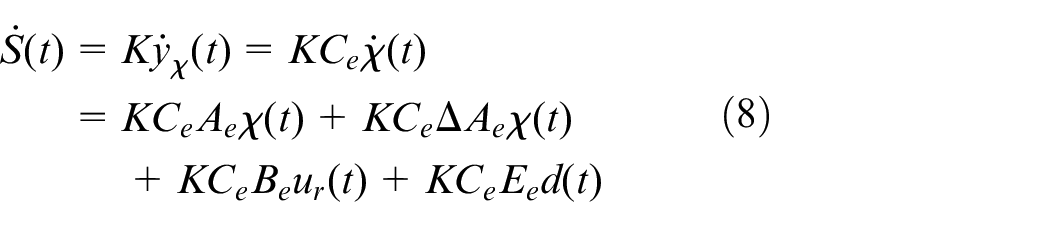
For analyzing the stability of

Then
For the stability analysis of

where
Since


in this case, the stability of the reduced dynamics on sliding surface equation (7) is guaranteed. Then the stability of equation (7) can be summered as the following question
Finding a matrix
The matrix
Traditional discontinuous controller design
If equation (9) is held, the stability of the sliding surface

which means that

For equation (10), it is difficult to get a feasible

and

and equation (10) can be reduced to

Since

and


the discontinuous controller can be chosen as

where

Remark 2
For solving
Then for the designed sliding surface equation (7), the SMC controller is


SMLC design
In subsection “Traditional discontinuous controller design,” a discontinuous controller

where
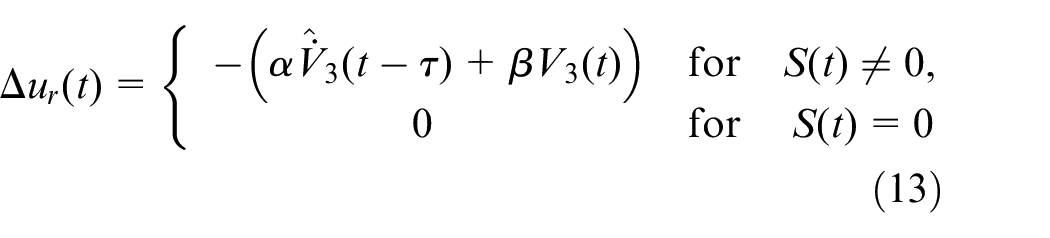
where
Assumption 3
The numerical approximating error is reasonable small, which means that, the sign of

where
Theorem 1
For system (6), if Assumption 3 is hold, and

then equation (6) is stable.
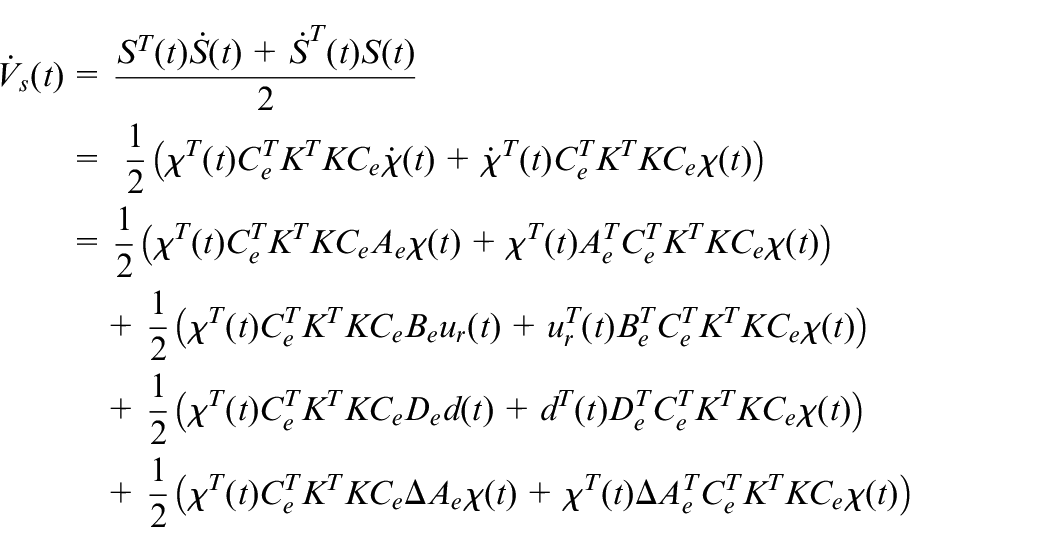
Proof
Constructing Lyapunov function for equation (6) as

For sliding surface (7)
where
Then for

Using the designed controller (12) we have

with the expression of

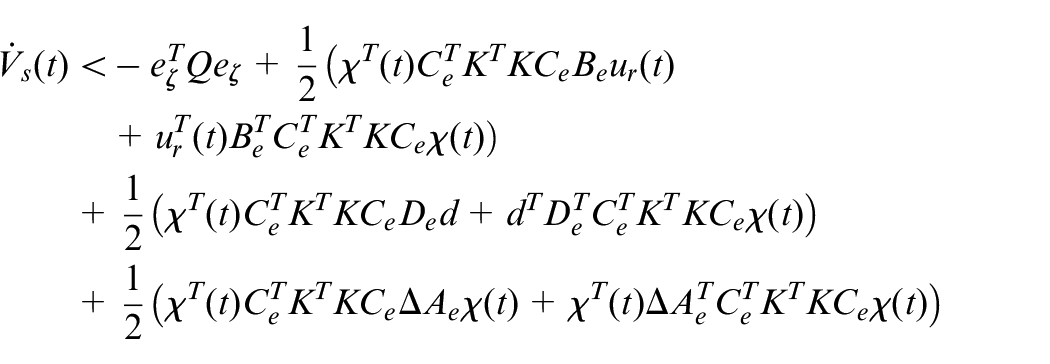
Then

Since

where
Form the proof of Theorem 2 in Hu et al.,
25
whether
Since
Solving algorithm
For the successfully application of the proposed DOF-SMLC, a solving algorithm is presented in this subsection. In subsection 3.2, the following equations should be

Associated with the Lyapunov stability theory, the following inequation should also be hold

Then
the solving algorithm can be listed as follows
Step 1: Associated with (11), the value of

Step 2: Find the matrix

Step 3: Getting

For the solving details of equations (15), (16), and (17), corresponding supporting materials can be found in Hu et al. 26 Then by solving equations (15), (16), and (17), the DOF-SMLC can be constructed.
Simulation results
For demonstrating the effectiveness of the proposed DOF-SMLC, a numerical simulation example is considered in this section. The parameters of equation (1) are chosen as following



then the matrices of (3) are
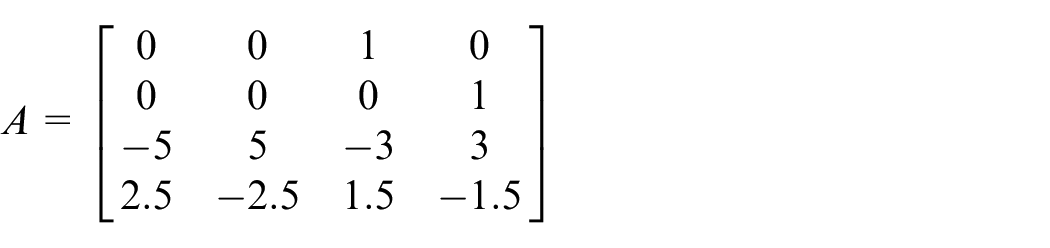
Then according to the proposed DOF-SMLC,
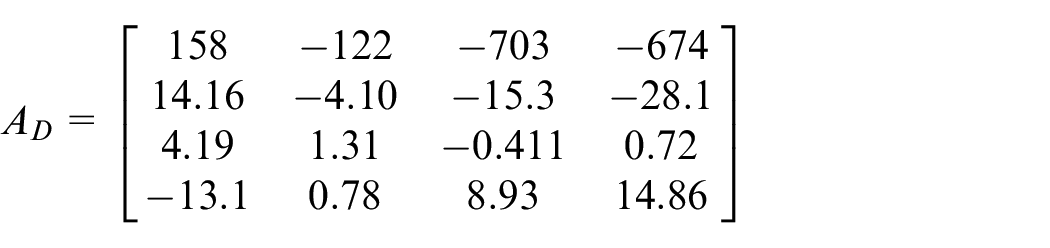


Then the sliding surface is constructed, and
In the leaning controller, we choose
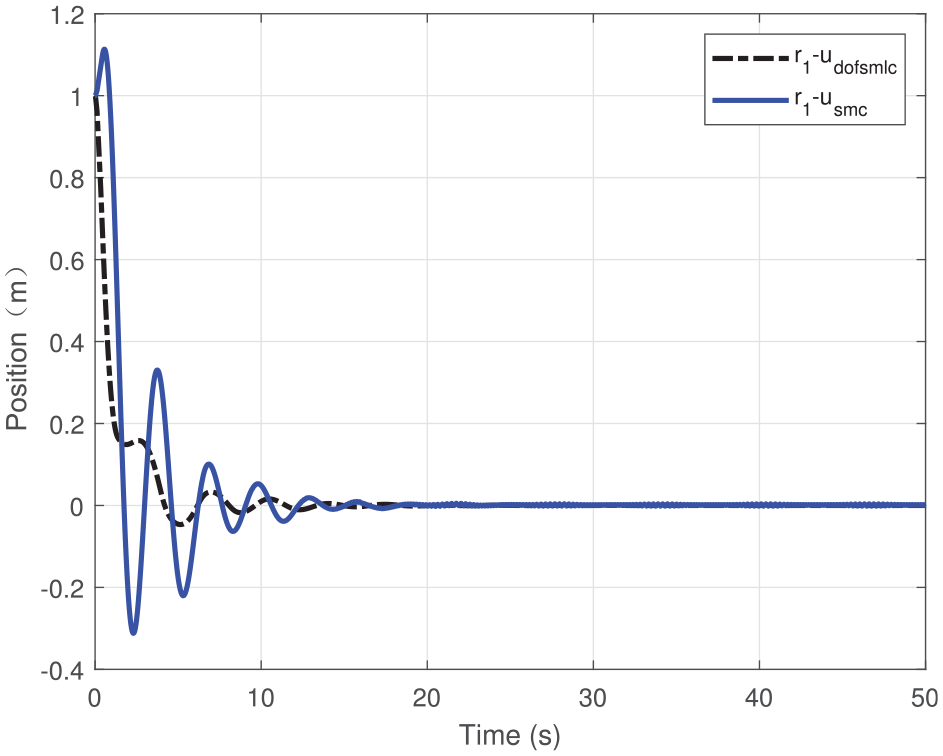
Position
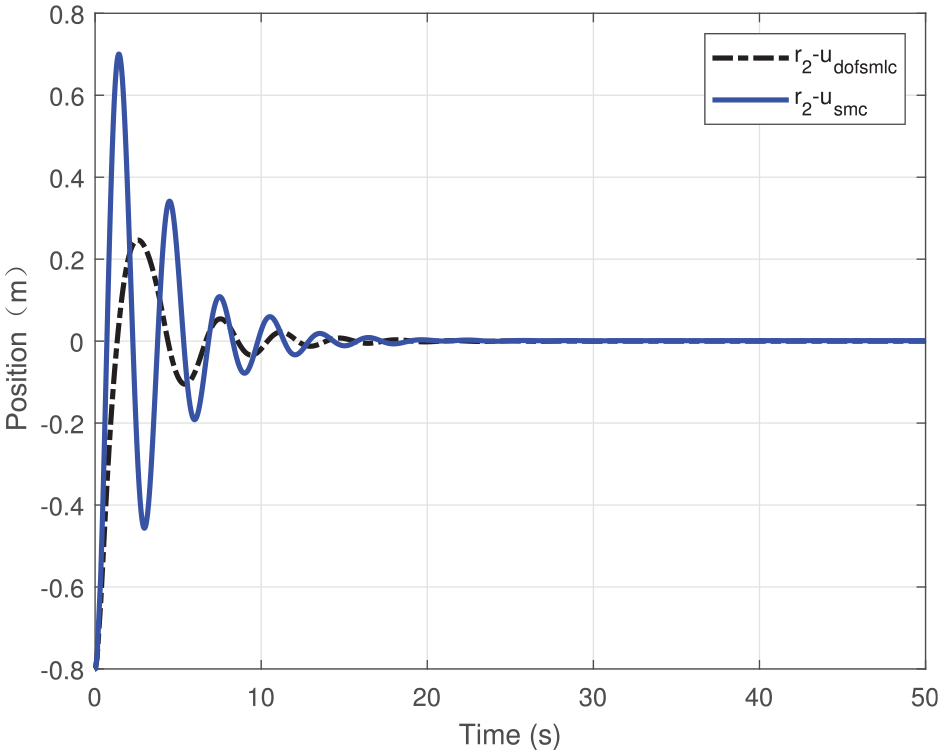
Position
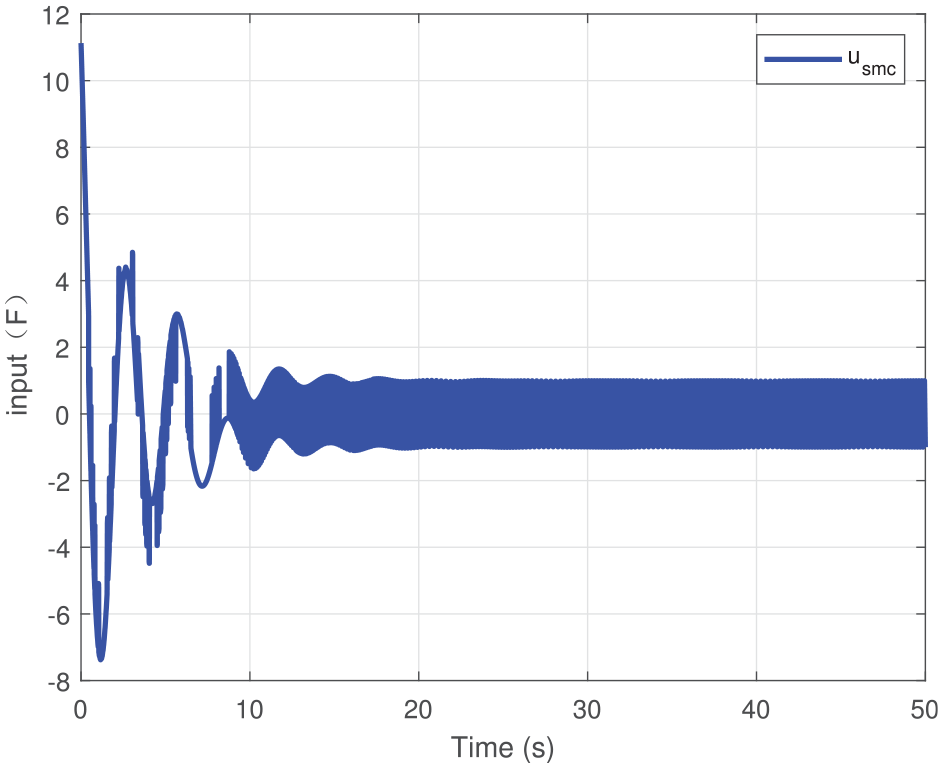
Input of
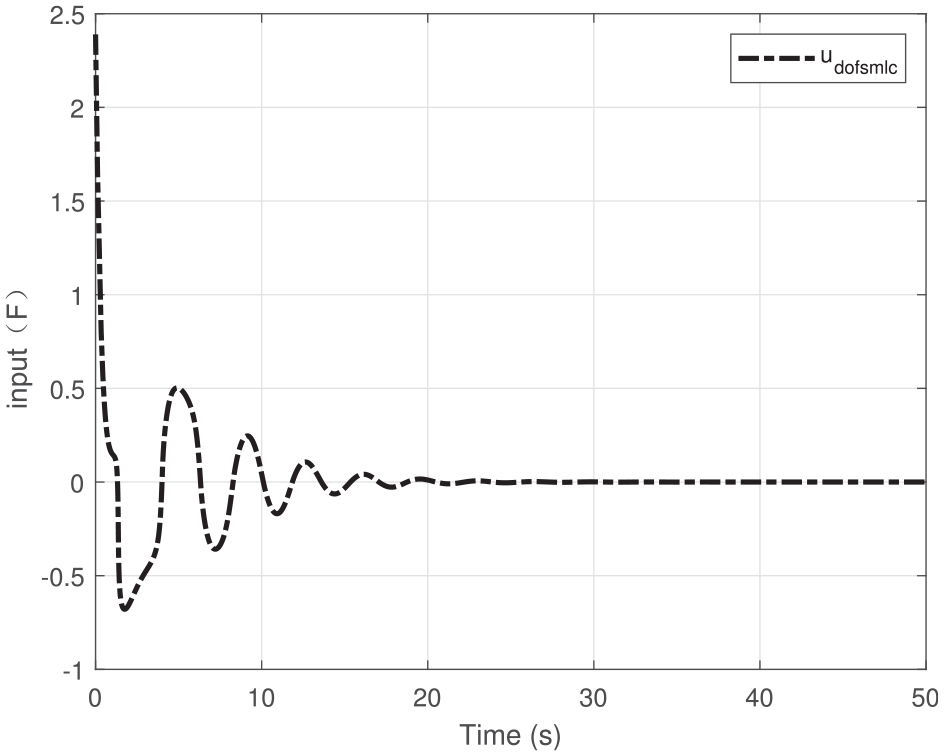
Input of
Conclusion
In this paper, a DOF-SMLC has been proposed for mechanical system. A DOF-based sliding mode surface is designed and then the stability of the designed sliding surface is discussed. A learning controller is designed instead of the discontinuous controller to guarantee the stability of the closed loop system. Finally, a numerical simulation example is given to show the good performance of the proposed strategy.
The proposed control method can be utilized by industrial system without enough sensor, or practical system which only partly states can be measured. But the upper bounds of parameter uncertainty and disturbance are assumed to be known in this paper, while in most instance, these special bounds are hard to be got. Further work is to design a controller without any priori information of them.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Fundamental Research Funds for the Central Universities (3102019ZDHQD03, 3102019ZDHKY06), Natural Science Basic Research Plan in Shanxi Province of China (2019JM-127), Aeronautical Science Foundation of China (201707U8003), and National Natural Science Foundation of China (61503392, 61304001, 61773386, 61673386).