
Abstract
Wireless sensor network is a collection of sensor nodes designed with different routing capabilities to operate on real-world applications. In extreme environments, real-time applications of wireless sensor network ensure exchange of data, a difficult one between the sensor nodes, when less resources are consumed. Therefore, researchers are developing a routing protocol including optimal routing procedures to increase the longevity of the networks. In this paper, an improved route extension architecture is developed in wireless sensor network environment. This Improved Greedy Perimeter Stateless Routing is proposed to offer an improved transmission coverage and reduced power consumption capability. It deploys a periodic broadcast of hello message (or control messages) including the positional information between the sensor nodes. The experimental result concludes that the Improved Greedy Perimeter Stateless Routing method achieves improved routing capabilities than the traditional hybrid protocols like LEACH and Greedy Perimeter Stateless Routing.
Introduction
Wireless sensor networks (WSNs) provide an independent, spatially distributed wireless network of devices which monitor physical or ambient conditions with sensors. A WSN performance incorporates a gateway to the real world and the disbursement of nodes with wireless connectivity. Depending on your application and the benefit requirement, you select a wireless protocol. Efficient autonomous routing (ERA) is defined in terms of network transmission, in line with internal and external factors. 1 Energy costs, robustness, output, and time are the four key factors to consider. ERA provides Improved Greedy Perimeter Stateless Routing (IGPSR) with safer mechanisms, which allows to boost coverage and individual node power to save paths with nodes. ERA-based protocols are of great importance, as energy is conscious or residual energy is increasing uniformly across the network, and find the right pathways and long network lives.2–7
WSN controls environmental conditions in a specific application. Because of its simplification and its enabling theoretical abstraction and analysis, the sensing model is widely used. 8 Hybrid Greedy Perimeter Stateless Routing (GPSR) has two processes: Greedy and Perimeter protocol. GPSR listed are packets with their current locations. A forwarding node therefore can choose the next hop for a packet almost optimally. 9 In particular, if a node knows where the node is, it is really an optimal choice for the next hop, which is easier to transmit the packets to the destination. If there is a failure in the forward and reverse routes, the route design must be changed to the preferred perimeter.
In this view, the study proposes an IGPSR that prevents safety issue and isolated coverage of nodes and network. It is designed to avoid issues associated with IGPSR and ERA. The significance of the proposed study is to provide routing with secured capability along the nodes. The study uses secured authentication process to secure the network that operates on cloud scenario.
In the proposed IGPSR system, IGPSR requires every node to periodically broadcast a message of hello containing information on their latest position to their pathway node. 10 A Hello node message contains the node ID, sequence number, current node position (for GPSR), current x- and y-coordinate and a portion of the coverage route range, and accessible node power. IGPSR delivers improved node coverage and individual node power.
Related work
GPSR 9 is a greedy transmission strategy that helps in transmission of packets between the source nodes and its closer vicinity. If you want to forward messages to your destination, your node will look into the list table of your neighbors in order to locate the node closer to the destination and transmits the message. Upon local optimization problem, when a nearby node fails to exist, then the node uses perimeter transmission for forwarding messages. In the last case, the selection of a forwarding node is based on a simple right-hand rule. GPSR therefore does not need to retain a routing table as a greedy routing protocol and freely roaming nodes regularly distributed. 11 The protocol operates virtually stateless and has the ability to route multiple paths. 1
In the literature, a number of variants were proposed to improve its performance in certain contexts in accordance with the original GPSR proposal. The method used in Lee et al. 8 developed a transmission algorithm that helps in improving the GPSR through the use of both the right- and the left-hand rules. In particular, in a GPSR-DP transmission node is selected on the left side and the right sides of transmitting node at local optimization problem that depends on the type of heuristics used. Similar to the GPSR technique, this method does not change its transmission behavior, but simply discards the package.
Granelli et al. 12 launched another GPSR variant which uses an approach known as the Greedy Advancement Buffering Area. Its GPSR application addresses greedy transmission failures. The perimeter transmission strategy used in this method is similar to GPSR. However, for following transmissions, nodes at the transmission field edges are not considered because they are considered to be more likely to leave the range shortly. A buffer zone at the transmission range does not consider the nodes for forwarding.
Dharani et al. 13 developed a GPSR strategy to improve GPSR accuracy. GPSR-MA is designed to be used for node ad hoc (vehicular ad hoc networks (VANETs)) networking and provides the GPSR basic packet header format speed and direction. This enhances the awareness of the mobility state of the nodes in the routing protocol and makes further information available in subsequent routing decisions.
Several VANET performance studies have already been carried out and the results showed that because of its increased packet delivery rate and lowered delay, Greedy Perimeter Coordination Routing (GPCR) is considered to be fit in highly dynamic node environment. GPSR is however also designed to meet both general and ideal requirements. Improvements in such routing protocols are made in context with GPSR protocol. For example, the Geographic Source Routing (GSR) protocol is designed to implement GPSR in the urban area 14 using Dijkstra algorithm and that transfers packets on shortest path. Also GPCR is modified to adapt with city scenario, 15 which uses the help of restrictive greedy algorithm.
GPSR routing protocol
The GPSR stateless protocol has flooding requirements and rapid adjustment to network topology mobility. A greedy perimeter transmission scheme is used for the transmission of packets to the destination.
The GPSR is used for equipping the nodes with a GPS or other geographic location services to gain geographic information in their respective own right. A Hello packet is exchanged between the neighboring nodes to learn about its one-hop neighbor. These data are stored in the transmitted packet’s header. The forwarding process is made to follow greedy scheme of selecting its immediate forwarding node nearer than every neighbor to the destination. The transmission is in line with greedy scheme for the better selection of immediate forwarding node closer to its destination. The flowchart of GPSR protocol is illustrated in Figure 1.
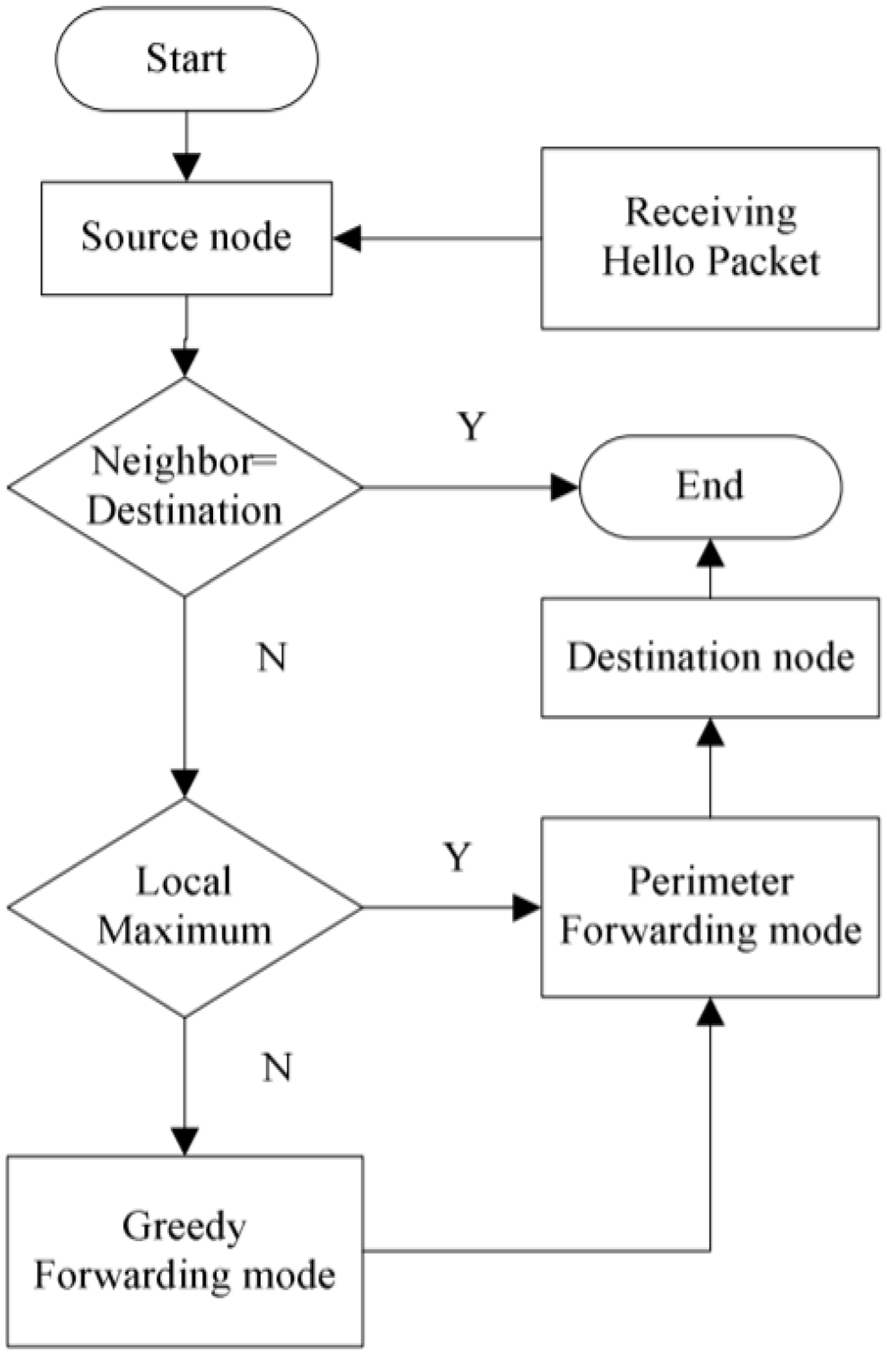
GPSR protocol.
However, in the highly dynamic node network, GPSR has some inconveniences. It makes forwarding decisions based primarily on accurate position information through the greedy forwarding scheme. Fast movement of nodes can cause frequent changes to the position of the nodes, and this inaccurate information could cause a next-hop forwarder to be chosen, which is eliminated from transmission range after certain intervals of time. Moreover, the right immediate neighbor is not guaranteed, and the packet is discarded at the end of the set Time to Live time, which is responsible for the loss of a large packet.
GPSR routing strategy
According to GPSR routing strategy, every node is assumed to have a GPS to take on its own position. Furthermore, nodes are equipped with several node speed sensors and smart devices with computer capabilities. The first is the description of the neighbor table. The main goal of GPSR learning from the information of immediate neighboring is to determine the density of node in the transmission range of the forwarder. In addition, a mechanism for predicting the node position is adopted. The next hop selection system is then provided to ensure that the packet is not dropped. And if an adequate forwarder cannot be found, the recovery system is necessary.
Neighboring table update scheme
The Hello Package is sent regularly by its one-hop neighbors. Mobile nodes, on one hand, track the position of each node. Instead, the package is to inform you about the current node location in your next list table. The number of intermediate neighboring nodes can then be used to count. The Hello Packet format is shown in Figure 2.

Format of Hello Packet.
The priority flag of node is PF with 0 or 1 in Hello Packet, and the way to set its value is shown below. ID is the actual node identity. The third and fourth fields are the node X, Y coordinates, namely, the position of nodes. The fifth and next flag indicate the speed of the node when generating the data packet. The area is regarded as the direction of the node, and ρ store around the present node the number of neighboring cars. The last field is the time TS. The source node calculates the current position (Xt, Yt) of the transmitter roughly with necessary information using the equation

where t is regarded as the current time.
The exactness of positions is achieved by forwarding Hello Packet on a periodic basis. The validity of the information on the surrounding area is checked by checking where its lifetime is completed. On the contrary, the information about the position and time stamp is updated in case that receives the node information, otherwise it will only be removed. Every node estimates the neighbor nodes within its range using location estimation speed after certain time periods. If the current position of a sensor node is not found, then the transmission through that particular sensor node is not valid and hence the transmission is diverted via other neighborhood sensors.
The proposed method is allowed to use Hello Packets for exchanging the information in periodical manner across one-hop neighbor between the nodes. The details are present in Hello Packets, where each node can be updated based on its own neighboring table in a quicker way. In order to select the next forwarding, it is possible to learn more exactly from the current forwarder about its one-hop neighbors.
Next hop selection scheme
When transmitting or transferring a packet, the validity of the path must be guaranteed not to discard the packet or increase hop counts. More hop counts can lead to a greater loss of the packet. If the current position of a sensor node is not found, then the transmission through that particular sensor node is not valid and hence the transmission is diverted via other neighborhood sensors.
In the GPSR transmission system, the source or intermediate node transfers the packet via neighbors to the target node. The selection of next hop is general and suitable. In the next scheme of selecting a hop, the source or forwarder node prioritizes one-hop neighbors in view of X, Y coordinates, direction, and speed.
The conditions for prioritizing their one-hop neighbors are as follows:
The nodes are directed from the current node toward their destination.
The relative speed is no more than 10 m/s between the next node and the current one.
The conditions are set and sent through a transmitting packet. The recipient node thus determines its own priority, depending on whether or not it fulfills the conditions. Calculate the probability of next hop, where the one-valued PF nodes works based on speed and distance. The probability formula is shown in the following:


where S is the geographical source position, M is the potential next hop, and D is the destination node.
The M node is then selected for the next hop node with the highest probability. If high-priority nodes are not available, then the next hop selection process works similarly with other nodes.
Proposed IGPSR scheme
The tricks best understood to help with the hierarchy and cache quantifiability area. Hierarchy in WSN does not function well because the well-defined and changing ranges are supported. Caching is considered to be beneficial but it is not jointly as scalable as native data.
The most important idea here is to use position data to improve quantification. The objective is to quantify each factor. The following quantifiability measurements are used: the message value of the Routing Protocol, the success rate of the delivery of the packet, and the per-node state routing that allows the router to remain standstill. It is necessary to propagate topology information for one hop and each node is made to track only the position of its immediate neighbors. The autonomous nature of position is key for routing utility of the node geography, position of the packet destination, and positions of the next hop area sufficient for the creation of correct transmission selection.
The immediately neighborhood node further takes the responsibility of communicating with sink node. IGPSR is part of analyzing the forward and reverse routes, which maintains well the broken links. These data are approved and the area unit for forward and reverse principles keeps routing data and tracks the transmission path. The protocol thus identifies the initialization and adherence to the routing path.
Route design
Suppose there exist n different nodes in WSN, hence every node is on the market. 13 Then, we can see the distance table between nodes to make the following form by way of exploitation:
Because the root node is selected randomly, it sends the messages to nodes that request its own identity and after initialization.
The remaining nodes (n − 1) are allowed to send their identifiers and the information to the source node in response to Trust Level Count initialization.
Finally, the space table is formed after all data from the remaining n − 1 nodes are received by the source node. Once the distance table is established, we tend toward using an enhanced Dijkstra to deduce the best path.
GPSR formula
Step 1. Count initialization of each trust level.
Step 2. Update the OT with response to delay in packet forward.
Step 3. Observe the transmission between neighbor nodes.
Step 4. Awaiting same packet forwarding with different time intervals of each node.
Step 5. If packets are sent via OT and the contents are not altered.
Step 6. Generate paths with positive trust.
Step 7. Detect the routes for transmission.
Step 8. Connect the routes for transmission.
Performance analysis
The results of the proposed IGPSR metrics are measured in four performance metrics including packet delivery ratio (PDR), network throughput, and end-to-end delay packets.
Simulation scenario
The Network Simulator 2.3 is used to evaluate the efficient GPSR coverage network performance. The simulation here focuses on the 2500 m × 2500 m area and has 30 mobile nodes for sensors. Furthermore, the radio transmission range is 250 m and the node’s mobility is set from 2 to 6 m/s. Furthermore, the pause time is set to zero during the sleep mode. The source and target pairs within the coverage area are randomly selected over the network. The Medium Access Control protocol chosen has an IEEE802.11DCF at a rate of 2.4 Mbps with simulation time of 100 s.
Throughput
The determination of throughput is tested by the total number of packets (per ms) arrived at destination node. The value of the IGPSR technique proposed is shown here in Figure 3. The chart shows that the rate of performance over the whole data transmissions is constant. That is because over a transmission period the total number of packets is delivered at a steady rate and therefore the throughput rate of the Low-energy adaptive clustering hierarchy (LEACH) and the Ad hoc On-Demand Distance Vector (AODV) protocol is maintained at a maximum.
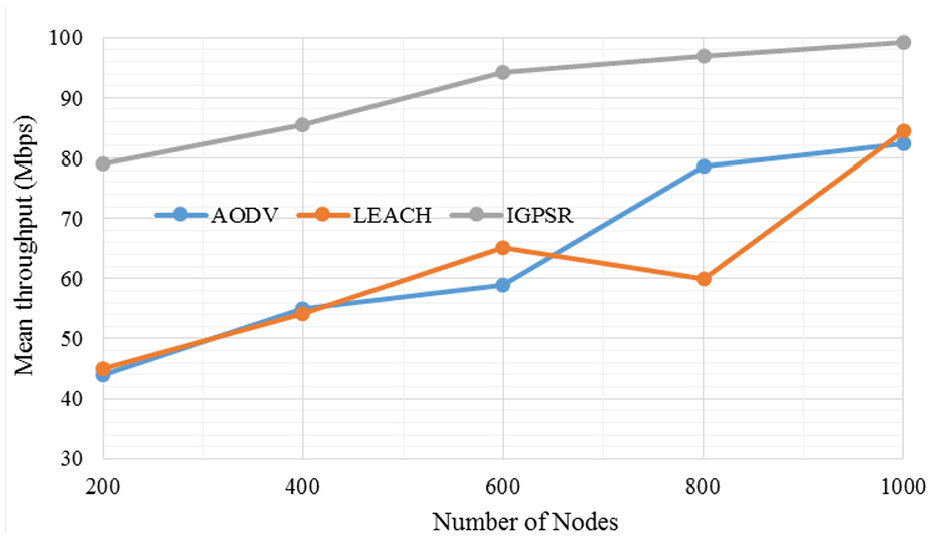
Throughput.
PDR
For the location and detection of large-scale networks, PDR (Figure 4) analysis is proposed by removing mobility and preventing attacks using GPSR system. IGPSR algorithms are tested for scalability advantages. This location and detection system shows a block diagram of the PDR.
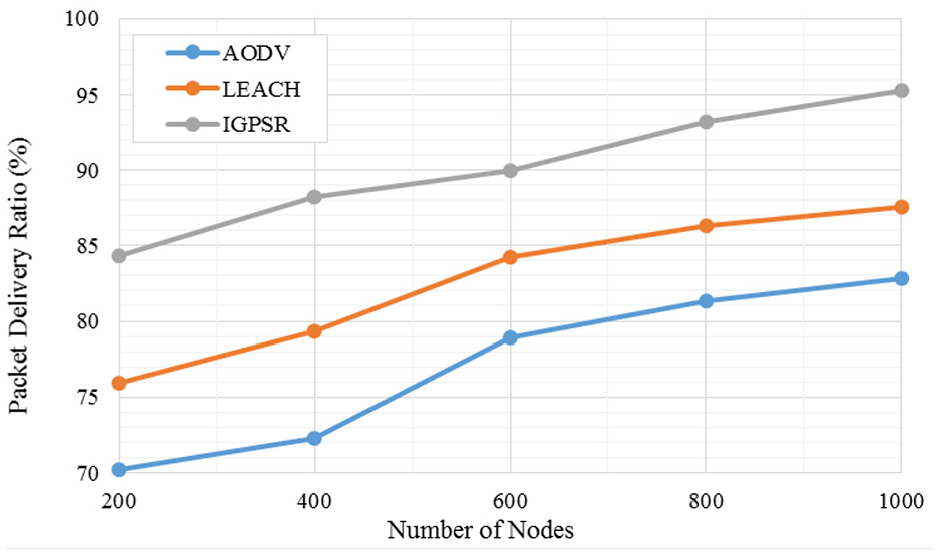
Packet delivery ratio.
PDR is the average time taken by the packets to get delivered between the source and target node. The average delay in IGPSR is shown in Figure 5. For the whole packet transfer period, the delay has been found to be very small.
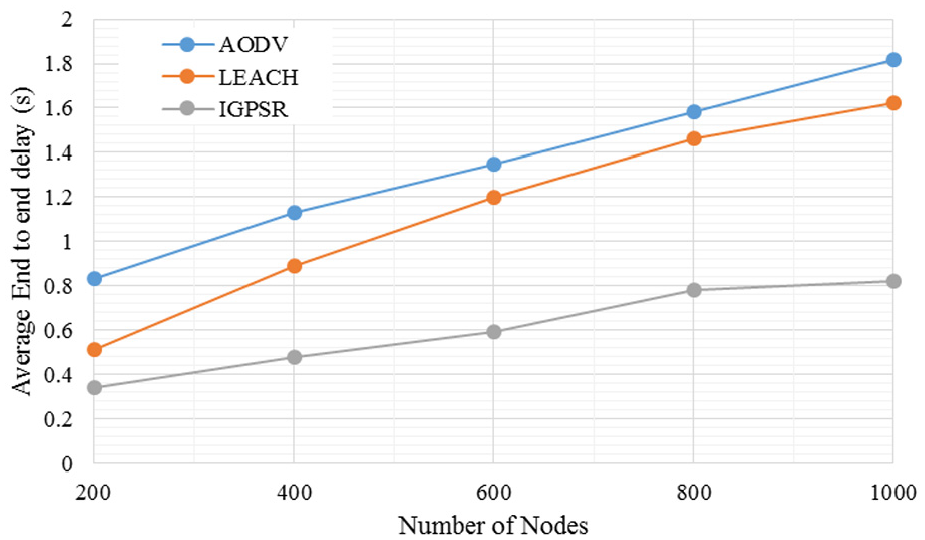
End-to-end delay.
Conclusion
In this paper, we present an improved GPSR protocol under a typical simulation condition. The result shows that the improved GPSR algorithm uses sensor nodes to follow the predetermined paths and the packets are cached at the time of data forwarding. The simulation results confirm the efficacy of the improved GPSR than other two methods. This shows the effectiveness of proposed method in improving the packet transmission between the source and destination node than other methods.
Footnotes
Author’s Note
Andino Maseleno is now affiliated with STMIK Pringsewu, Lampung, Indonesia.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.