
Abstract
To avoid infrared or thermal signatures of the fixed-wing unmanned aerial vehicle, the engine is encapsulated in a special cowling that limits the ventilation and causes thermal stress. The stressed condition heats up the engine and accelerates the degradation process compromising life and causing early failure. Fatigue life estimation can help to predict and prevent sudden failure and improve safety and reliability. The study presents a grey forecasting methodology for estimating the fatigue life of fixed-wing unmanned aerial vehicle engines operating under a stressed environment. Grey forecasting models are used for fatigue life estimation of the unmanned aerial vehicle engine using degradation data of output power for reliable flight hours (50 h). The result of grey forecasting models reveals that under normal operation, engine power drops to a threshold value of 9.4 kW (below this engine does not remain flight worthy) after 100 h. The forecasted life is in close agreement with the specification of the engine under normal operating conditions. This validates the accuracy of forecasting models. Furthermore, the forecast models are applied to estimate the fatigue life using degradation data in a stressed environment, which comes out to be 70 h. The study proposes application of grey forecasting to predict mechanical degradation and early failures by considering single or multiple parameters undergoing degradation and having limited data samples. Forecasting results are compared with other prediction tools like autoregressive–moving-average and found more accurate which shows the significance of grey forecasting models in a limited data sample environment. The results are also compared with exponential regression and found in close agreement but more robust.
Introduction
The engine is the only thrust source and mission-critical part of fixed-wing unmanned aerial vehicle (UAVs). UAV engine demands, predicts and prevents rather than fails and fixes due to the safety and complexity of the operation. Failure of most of the mechanical parts is due to the degradation which depends upon the fatigue level of the operating environment. The stress–strength model developed by Johnson suggests that when the stress exceeds or approaches strength, the degradation process accelerates causing early failure. 1 Estimating the degradation process can help in predicting and avoiding failures of safety-critical systems like the UAV. The fatigue life of the UAV engine is unknown and after certain flying hours, without knowing the prognostic condition of engine flying becomes risky.2–4
Recently, the use of UAVs has significantly increased both for military and commercial applications. Fatigue life estimation of the UAV engine will help in improving the safety and reliability of operations. One method to evaluate the fatigue life is by analysing degradation, field, or failure data using different statistical tools. Unfortunately, insufficient degradation data for such type of application are available, and modern prediction tools such as neural networks and artificial intelligence cannot be applied as they demand large data. The advantage of grey forecasting models and grey theory for limited degradation data environment has not been effectively utilized in machine degradation and prognostic.5,6
Researchers have employed different techniques for life estimation based on degradation and prognostic health condition of different mechanical systems. Ordóñez et al. 7 used a hybrid approach to predict the remaining useful life (RUL) of aircraft engines by combining a data-driven and model-based approach. Kumar et al. 8 used hidden Markov models (HMM) and regression techniques to predict the RUL of cutting tools. Zhao et al. 9 used a stress field intensity approach for fatigue life prediction of aero engines. Peng and Dong 10 used HMM and grey model for deteriorating the health estimation of engineering assets. Zhou et al. 11 used a grey prognostic model based on the Markov process and grey incidence analysis of energy conversion equipment degradation. Maintenance of energy conversion equipment must be pre-empted to avoid system breakdown. Grey forecasting models help in forecasting necessary maintenance points for prognostic health management. Ismail 12 used three methods: maximum likelihood (ML), percentile bootstrap (PB) and Markov chain Monte Carlo (MCMC) for reliability analysis of constant stress life profile data. Zhang et al. 13 used a fuzzy-grey method to predict the failure of rotating parts to prevent failures in the mechanical systems. Almost all the researchers have performed prediction of fatigue life, RUL and reliability of mechanical system using a model-based, data analysis-based, or both model- and data-based mixed approaches. The grey forecasting models have proven their usefulness in a limited data environment, and this motivates us to apply these models for fatigue life estimation using degradation data. We find a gap in the application of grey forecasting models in life estimation and reliability predictions. Grey forecasting models use accumulated generating operation (AGO) and inverse accumulated generating operation (IAGO) for processing and organizing small data samples to mitigate randomness. This is similar but more accurate to the moving average and auto regression techniques used in prediction and forecasting. The grey forecasting models are used for the prognostics of the system with some degree of greyness in available data, system structure, or system.11,14,15
Grey forecasting can be applied for degradation analysis of the mechanical system in order to predict early failure to avoid accidents due to sudden failure. Wang et al. 16 combined the fuzzy and grey theory to perform risk analysis using failure data of computer numerical control (CNC) machines. Failure of cutting tool or machine can cause significant loss by destroying semi-finished parts, loss of man-hours and material. Zhao et al. 17 used grey forecasting theory to estimate the fatigue life of wire rope in a limited data environment as grey forecasting is considered a more reliable tool in limited data environments. Yang et al. 18 used a novel multi-information fusion grey model for predicting the wear trend in wind turbine gearboxes by monitoring its lubricant oil and associated data analysis. Lihua et al. 19 used grey forecasting models for active vibration control systems for earthquake response mitigation.
Grey system theory and grey prediction algorithms such as grey model (GM(1,1)), discrete grey model (DGM(1,1)) and nonhomogeneous discrete grey model (NDGM(1,1)) are not very common in the field of life estimation and failure prediction. Grey prediction tools can have a useful application where the data are sparse or minimal and have some uncertainties. Modern prediction tools such as machine learning, neural networks and fuzzy set theory cannot be applied in a small data environment as these techniques demand big data for model training.20,21 In this research article, the service life of a turbo UAV engine with a capacity of about 18 hp under different operating conditions is estimated using grey forecasting models. The typical service life of such type of UAV engine under standard operating conditions is around 500 h. After every 100 h, piston and cylinders need to be replaced. Due to application requirements, we have to elude thermal and infrared signatures which can be achieved by installing the engine inside a cowling which minimizes ventilation. This causes the UAV engine to experience thermal stress due to which engine temperature rises. Degradation of moving parts in both cylinder and piston of the UAV engine is accelerated in the presence of thermal stresses. 22 Due to this forced thermal degradation of engine parts, it is necessary to estimate the fatigue life of the UAV engine. To make the estimation or prediction, we need to have some degradation or failure data collected through experiments and field failures or ground testing. We consider 50% of total flying hours as safe and degradation data of the first 50 h can be used for remaining safe flying hours estimation.23,24
The key objective of this study is to estimate the fatigue life of the UAV engine using grey system theory and its grey forecasting models to analyse degradation data for life estimation. The main contributions of this study include the following: (1) application of different grey forecasting models to predict mechanical degradation and their mutual coherency to predict normal and fatigue life of UAV engine; (2) conduct comparative analysis between grey models and linear regression model; (3) to give a new dimension to prognostic studies for mechanical degradation and to predict and prevent failures. A comparison of results with the autoregressive–moving-average (ARMA) model 25 to estimate the effectiveness and advantage of grey models has also been made.
The content of this manuscript is structured as follows. Section ‘Methodology’ discusses how the research work will be carried out. Section ‘Grey system theory’ is about grey prediction models; here, we have discussed the mathematics of each grey model GM(1,1), DGM(1,1), NDGM(1,1) and AGO/IAGO functions, and interconnections and applicability or limitations of grey models. Section ‘Results and discussion’ discusses the predicted results for life estimation under standard and stressed conditions. Section ‘Conclusion’ concludes the whole manuscript with outcomes, application and recommendation for future research work.
Methodology
The research methodology can be divided into two parts as follows: (1) experimental setup to acquire sample data of UAV engine at normal and stressed conditions or documenting reliable flight-hour data to predict failure, and (2) use of prediction tools to estimate the normal and fatigue life of the engine. This new technique is beneficial to reschedule maintenance activities and part replacement to assure reliable and safe operation. 26 The engine test bench can measure the following engine parameters: engine revolutions per minute (RPM), engine torque, the propeller thrust, cylinder head temperature, intake air temperature, exhaust gas temperature, intake manifold pressure and fuel consumption (throttle %).
All the parameters have a certain threshold value at which the engine does not remain flight worthy. The research work focuses on the safe flying of fixed-wing UAV, so the amount of power delivered by the engine at various times and the effect of degradation on output power is considered as the core parameter. The engine starts delivering power in the range of 12.4–12.5 kW at normal operating conditions. With the passage of time, the power drops and power value below 9.4 kW is considered as the threshold failure point. The power loss of the engine is due to heating of the cylinder and piston which degrades the moving surfaces and hence power drops. In presence of limited ventilation, the engine operates in a stressed environment due to which engine temperature rises. A difference of about 50 °C is observed between normal and stressed operating conditions. As shown in Figure 1, the temperature is mostly around 200 °C with minor fluctuation under normal operation where ventilation provides necessary cooling. Under a stressed environment where ventilation is compromised in order to conceal thermal signatures due to the mission profile, a positive shift of approximately 50 °C is observed in chamber head temperature (CHT) of the UAV engine. This accelerates the degradation process due to additional thermal stress in engine moving parts; the engine power decreases and below a threshold level, the engine does not remain flight worthy. The time to reach this point is called the useful life or fatigue life.
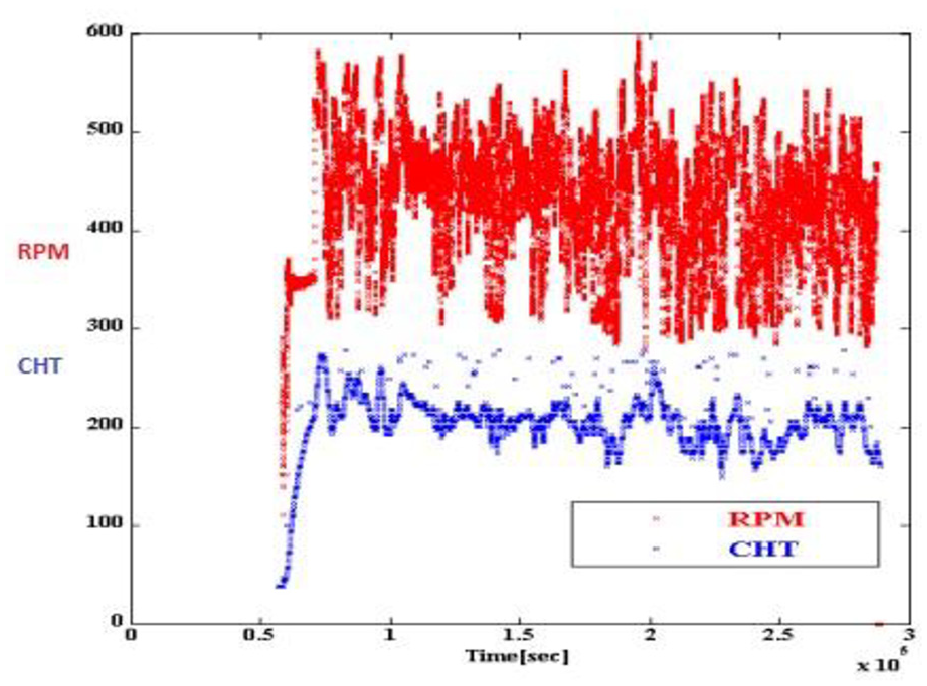
Chamber head temperature (CHT) and RPM with time.
The effect of the rise in temperature on moving parts of the UAV engine with time is shown in Figure 2. During the engine’s routine maintenance, ring and piston are replaced in order to prevent damage to engine assembly. However, degradation in the cylinder of the UAV engine accumulates, and after five removals of the ring and piston, it is required to retire the UAV engine. Surveillance, fighter and rescue types of UAVs need a high-quality engine for which life estimation is necessary to carry out preventive maintenance in order to mitigate the risk of operational failure. Target UAVs are a one-shot device, so engine quality is normal.

Piston and needle bearing degradation in a thermally stressed environment.
The fatigue life estimation also helps in the life extension of engines based on experimental and predicted data, as the duty cycle of flying hours plays an important role in the degradation process. 27 Single long flight causes more degradation as compared to many flights of small duration. This can also be achieved by forecasting fatigue life and estimating the wearing process with a certain degree of accuracy. 28 In this research, a data-driven approach is used in which the degradation data or failure data are used for the life estimation of the UAV engine. A model-based method in addition to the data-driven approach is also applied, in which all the systems and subsystems are mathematically modelled. Modelling of complex systems like UAV engines and stresses experienced with a certain degree of accuracy is complicated. However, in the data-driven approach, having the failure or degradation data of the system parameters is sufficient. In the data-driven approach, the accuracy of the prediction depends both on input data and prediction algorithm or tool. Life data for reliable operation of the UAV are collected both from test run and telemetry data on UAV flights. Flight data for reliable flying hours are taken as input to predict the RUL. Considering the factors of safety, we assume that 50% of flying hours are reliable flying. During these flying hours, the degradation data are collected to predict the failure point. In the case of accelerated degradation due to stress, quality, or developed fault, the data will help in predicting early failure. From the literature, it is observed that exhaust gas temperature, RPM, engine power, or torque are the main parameters for engine health assessment. The most critical parameter for reliable operation and life estimation is engine power which has built-in information about all other allied parameters as it is the decision parameter. 22 Power decline is taken as degradation data, and using prediction techniques such as grey prediction models GM(1,1), DGM(1,1) and NDGM(1,1), 29 fatigue life and hence RUL of UAV engine with a certain degree of accuracy and reliability are estimated. UAV engine along with a test bench model for power monitoring is shown in Figure 3. The torque sensor is providing the output power of the engine. As the engine operates and completes its flying hours, the output power decreases due to wear and tear of moving parts.
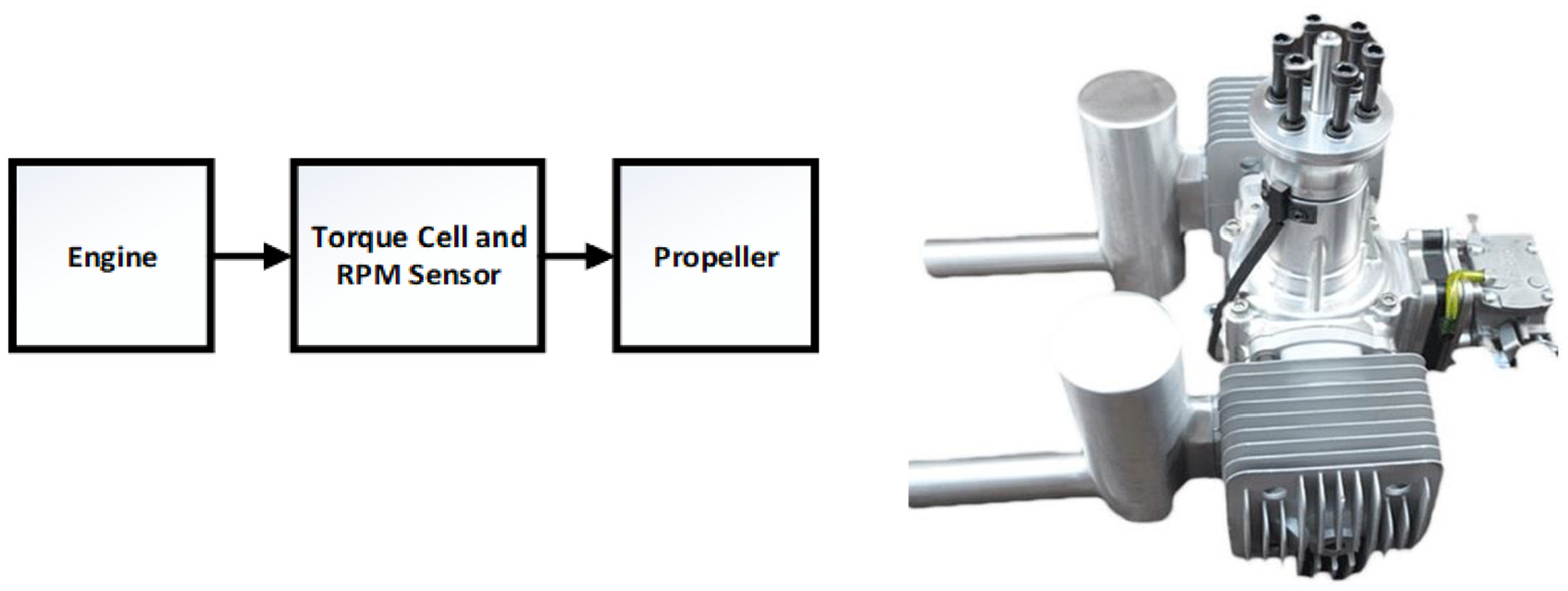
Engine and test bench model diagram. 30
Data collection and analysis
Table 1 shows the first few measurements after time 5 and 10 h under standard and stressed operating conditions.
Firs two data samples of standard and modified conditions.
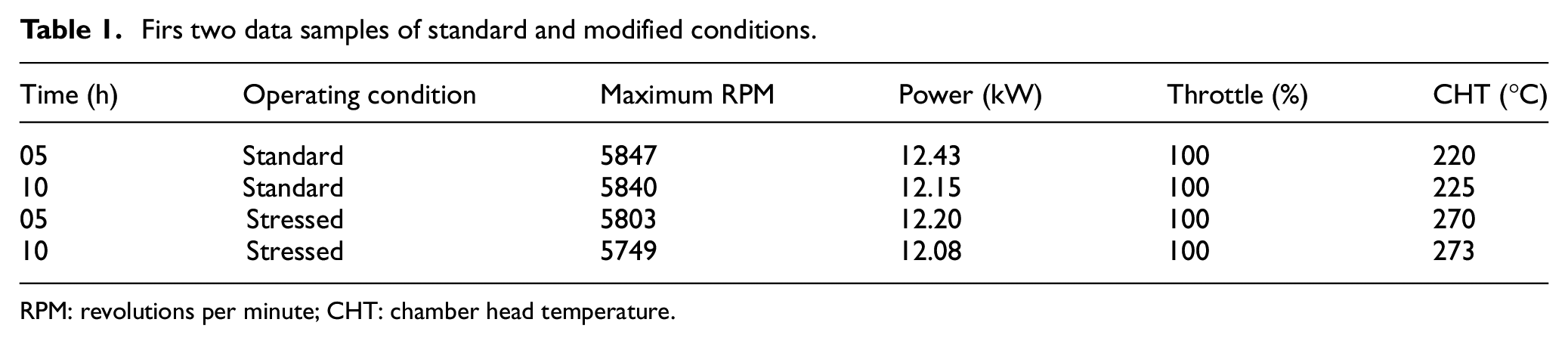
RPM: revolutions per minute; CHT: chamber head temperature.
In order to make a grey prediction for TTF (time to failure) or the time at which power will drop to a threshold value of 9.4 kW or below, 10 data samples are collected at an interval of five working hours to make better predictions.
Grey system theory
The Grey system theory was developed in the 1980s; the basic concept was to deal with grey information. Grey information means data are not 100% complete, and there is some degree of greyness or uncertainty. The methodology is more powerful than many statistical tools that need complete information and large sample data to make accurate predictions. Different models are developed based on the type of input data. In this research, we have applied GM(1,1), DGM(1,1) and NDGM(1,1). Grey modelling software version 5.0 and MATLAB are used to make normal and fatigue life estimation using these models. Results of grey forecasting models can be considered identical if the input data type is of similar nature; however, the degree of approximation between different forms is different. NDGM(1,1) is mostly used for nonhomogeneous discrete data. In order to evaluate the effectiveness of grey forecasting models, the autoregressive prediction model is applied to degradation data. The flow diagram of grey forecasting models is given in Figure 4.
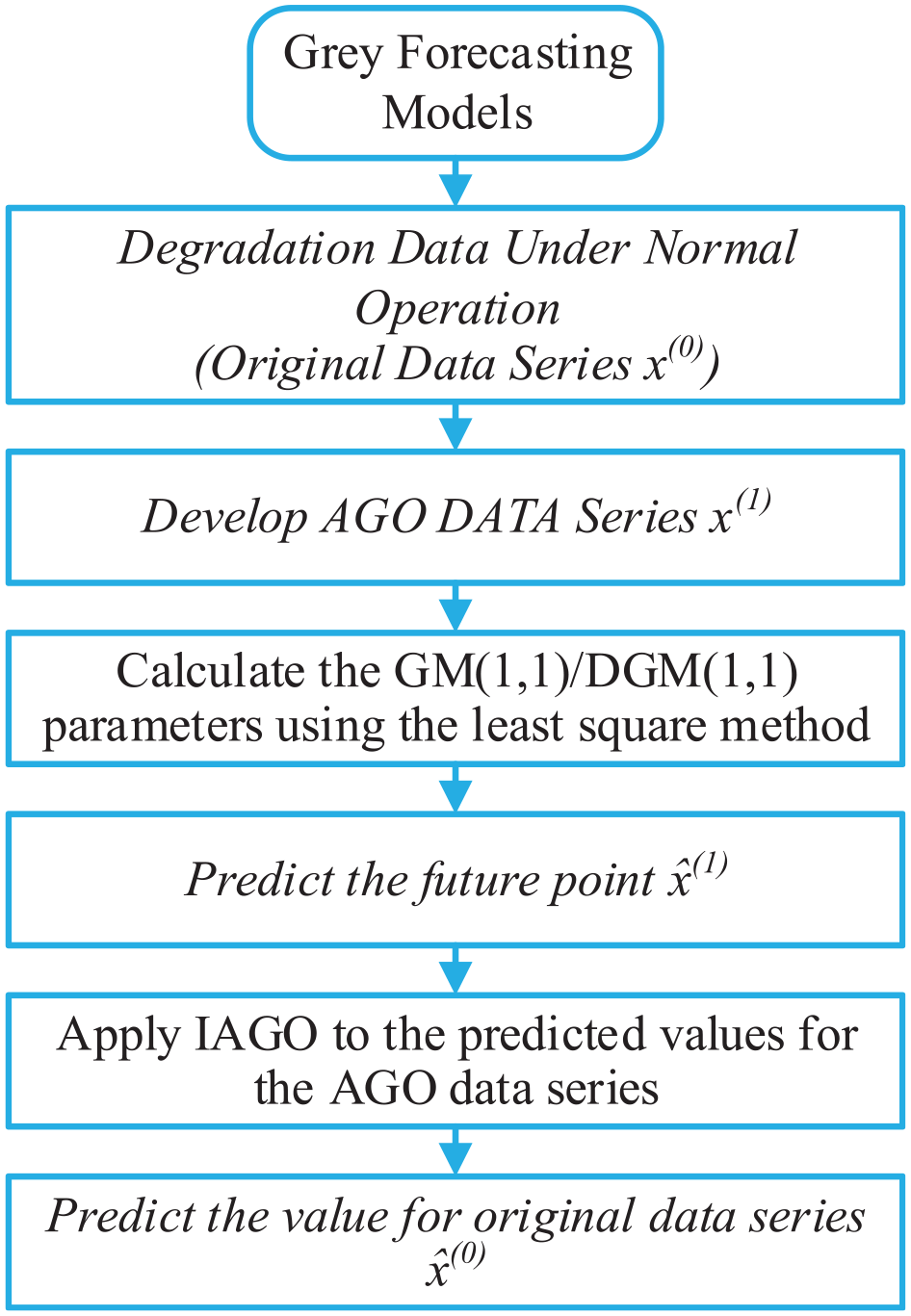
Flow chart of grey forecasting models.
Grey prediction model GM(1,1)
We will use three different grey prediction techniques to estimate TTF or RUL of the UAV engine. The first one is the grey prediction model,
AGO and IAGO also called 1-AGO are used to generate new sequences
Let

IAGO and AGO are maps which transform
The basic form of grey prediction model GM(1,1) is explained below:
Step 1: original sequence of data with m terms is expressed as

Step 2: the accumulated generated sequence is given as

where
Step 3: the 1-AGO function in terms of the differential equation is given

where ∧ represents a grey predicted value with initial conditions
Step 4: equation (4) in discrete form can be rewritten as

For

where
Equation (6) can be rewritten as equation (7) to predict value

where
The basic model of GM(1,1) can be expressed as

where
Model parameters

Model parameters a and b in equation (9) can also be expressed as

where parameters


Step 5: solving equation (4), we get the particular solution in the form of model parameters

where
Equation (14) is called time response, and the corresponding predicted output is given by the following equation
where
Discrete grey prediction model DGM(1,1)
The DGM(1,1) model is similar to the basic grey prediction model, mathematically34,35

is called a discrete grey model abbreviated as DGM. If
then equations (15) and (16) satisfies the following equation 36

The relation between GM(1,1) and DGM(1,1) models
By definition, the basic form of

Putting the values of k from equation (8), equation (19) can be rewritten as

Solving equations (16) and (19) simultaneously, the values of

Solving for

To explain the relationship between GM(1,1) and DGM(1,1), equation (15) can be written as

Nonhomogeneous discrete grey prediction model NDGM(1,1)
For every grey system model, whether it is a basic model
For a given sequence


where

Once we have calculated
To calculate the values of
Further details of the mathematical explanation of the model, its theorems, corresponding lemma and its properties are explained by Liu and Lin (2010, Chapter 5). 5 We have applied all three models to predict TTF or RUL for the UAV engine. The grey prediction is helpful, where we have limited or sparse data and want to make an accurate prediction. The same methodology can be applied with short intervals for other modified conditions, thereby saving time and life of the engine during testing. Details of the forecast are discussed in the following section. Changes in the duty cycle of the UAV operation have both positive and negative effects on the degradation process. So it is necessary to mention the duty cycle of operation in data collection as it will provide information about fatigue life operating conditions and duty cycle.
Results and discussion
As the engine starts, its RPM increases, and so the power of the engine increases till it reaches a maximum power of 12.43 kW, and at this power, the value of RPM is between 5500 and 6000. We can see that initially power and RPM are almost the same for standard and modified conditions. At this time when the engine is new, and there is no performance degradation due to stresses (thermal stresses affecting piston and cylinder). As the temperature increases, thermal degradation of moving parts reduces the efficiency of the engine and out power is dropped slowly and continuously. At a threshold value of 9.4 kW, the engine does not remain flight worthy, and flying is at risk. Figure 5 shows that under stressed or modified conditions, engine demands more RPM which also a degrading factor and affects the life of the engine. The effect of thermal degradation on the cylinder and piston is shown in Figure 2. From reliability studies and life estimation data of mechanical systems, they are supposed to be best when new, unlike electronic systems. The degradation factor affects the life of a mechanical system which finally leads to failure. As a factor of safety, we assume that there is no flying risk under normal and stressed conditions for the first 50 h even the engine is going through continuous degradation. The degradation data for the first 50 h can be used as input to predict the remaining flight hours. One thing that should be noted that the duty cycle of operation is an important factor that decides the rate of degradation. Longer flights cause more degradation than short flights for the same number of flight hours. It is, therefore, necessary to record the duty cycle along with stresses for recording degradation of the UAV engine.
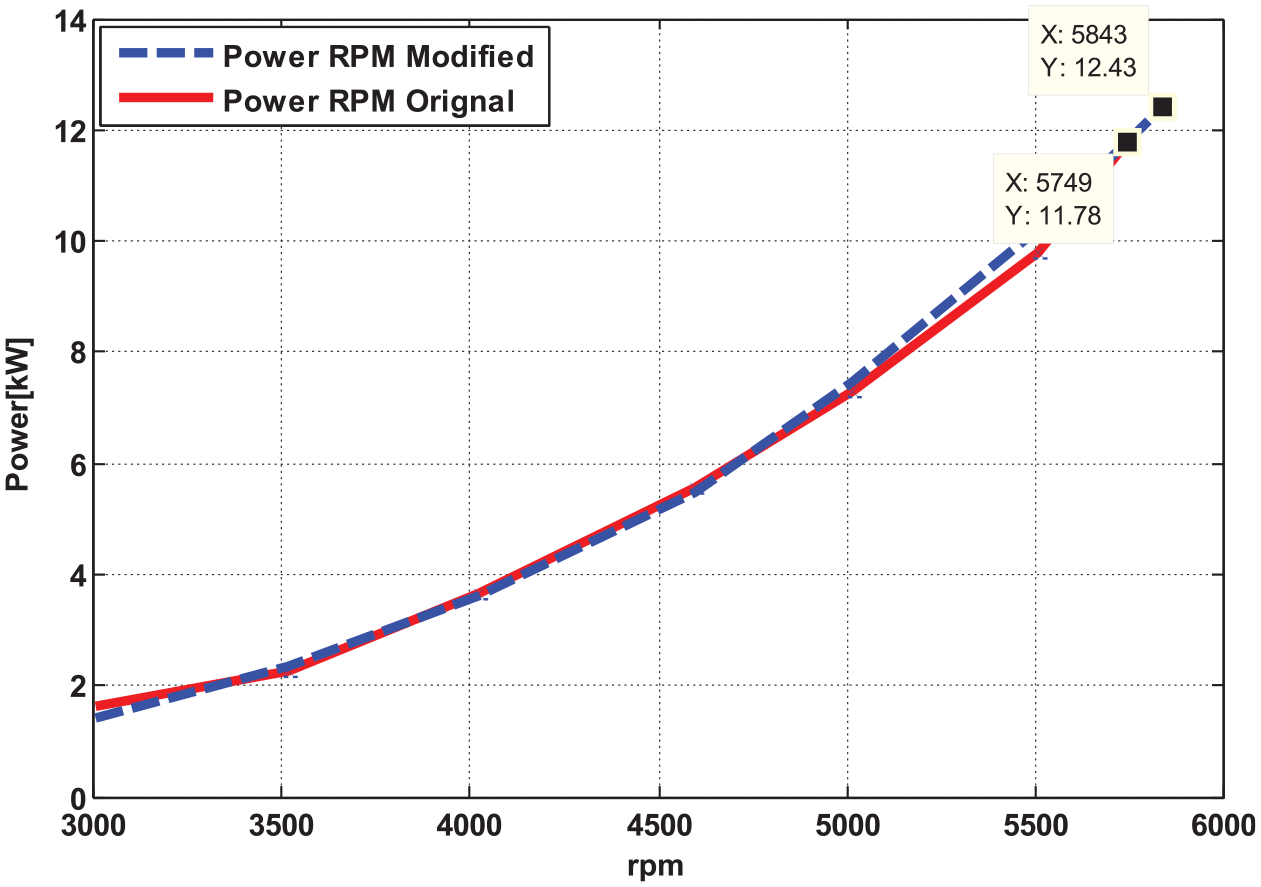
Graph of power versus RPM at standard (original) and at stressed (modified) conditions.
Life prediction under normal operating conditions
The engine has a standard life 500 h under normal conditions (when the engine is provided with proper ventilation to achieve heat transfer with the environment), but after every 100 h of operation, the cylinder and piston need to be replaced. We have data for the operation of 50 h with the reading of output power after every 5 h. The predicted results show the trend of failure (power drop to 9.4 kW from 12.43 kW) are given in Table 2 and shown in Figure 6.
Life estimation under standard operating conditions.
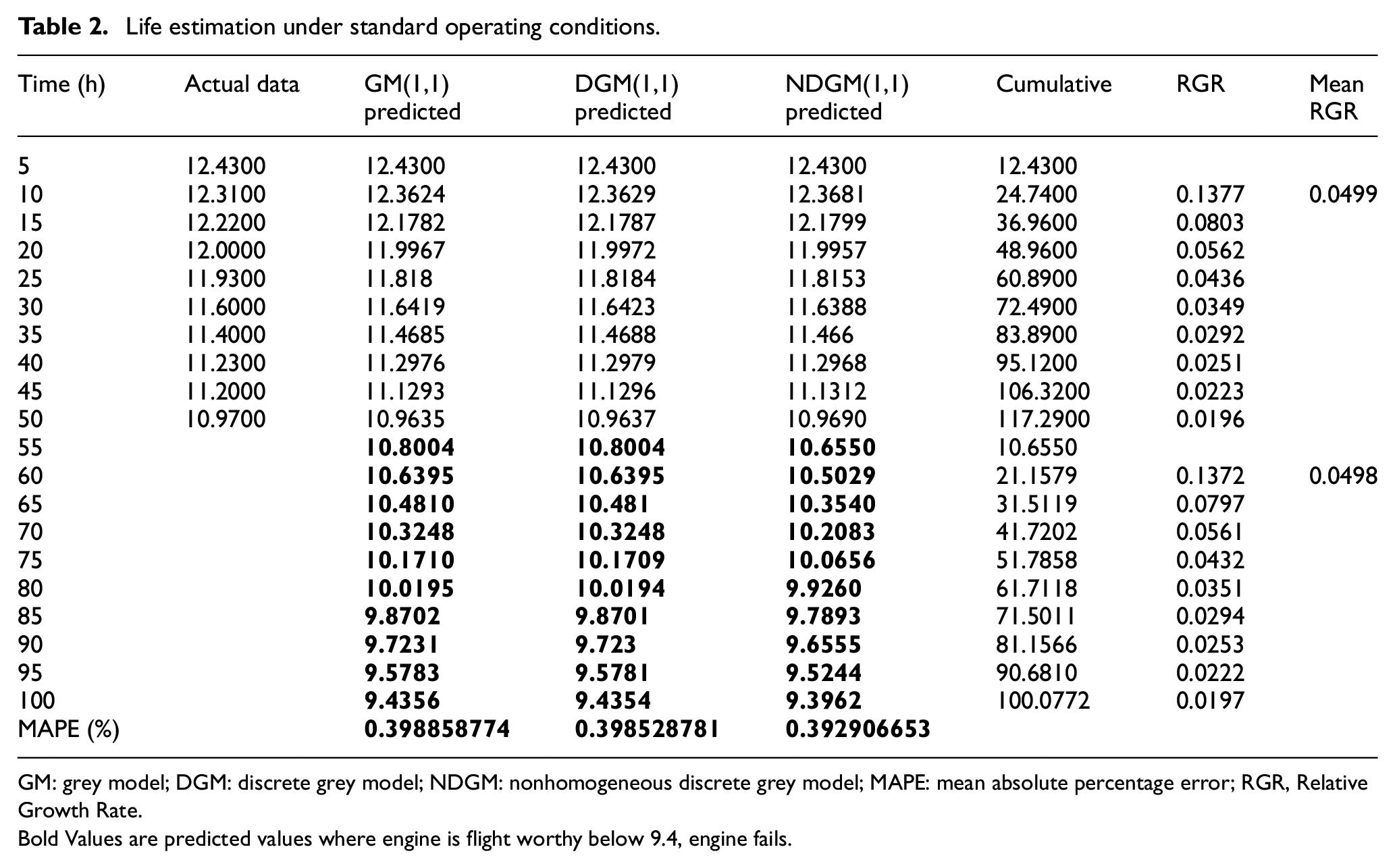
GM: grey model; DGM: discrete grey model; NDGM: nonhomogeneous discrete grey model; MAPE: mean absolute percentage error; RGR, Relative Growth Rate.
Bold Values are predicted values where engine is flight worthy below 9.4, engine fails.
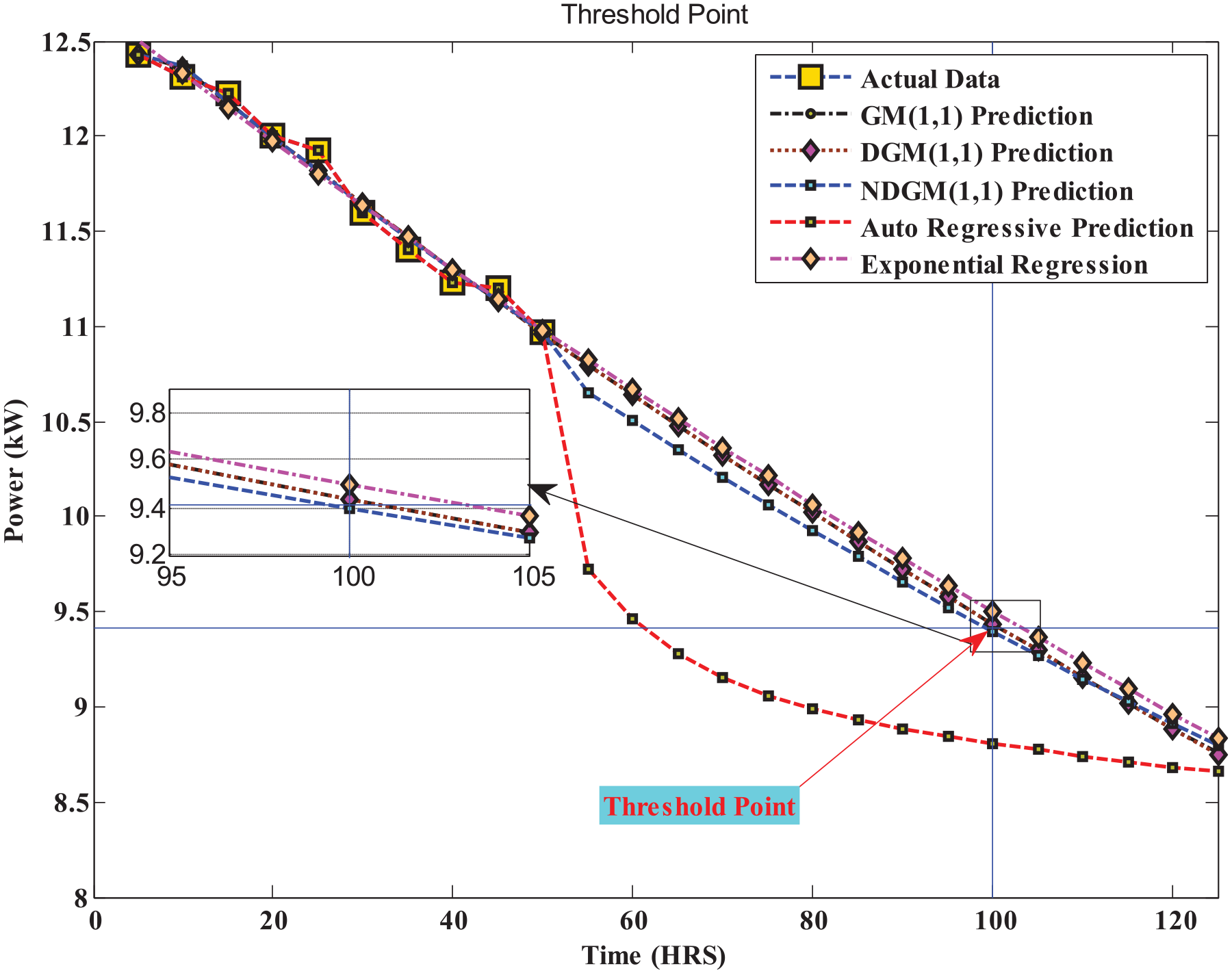
Grey forecasting of service life under standard operating conditions.
From Table 2, it is clear that prediction made by grey prediction models

Life prediction under stressed operating conditions
Under stressed (modified) operational requirements, the engine is encapsulated in a special cowling to conceal infrared and thermal signatures. The rise in temperature due to the extra thermal stress negatively affects the degradation of moving parts. As a result of this wear and tear, the degradation of engine parts becomes rapid and an earlier failure is expected. Again, we have collected data of engine performance at modified conditions and the first 10 readings, taken after every 5 h are considered. Using grey prediction models
Life estimation under stressed operating conditions.
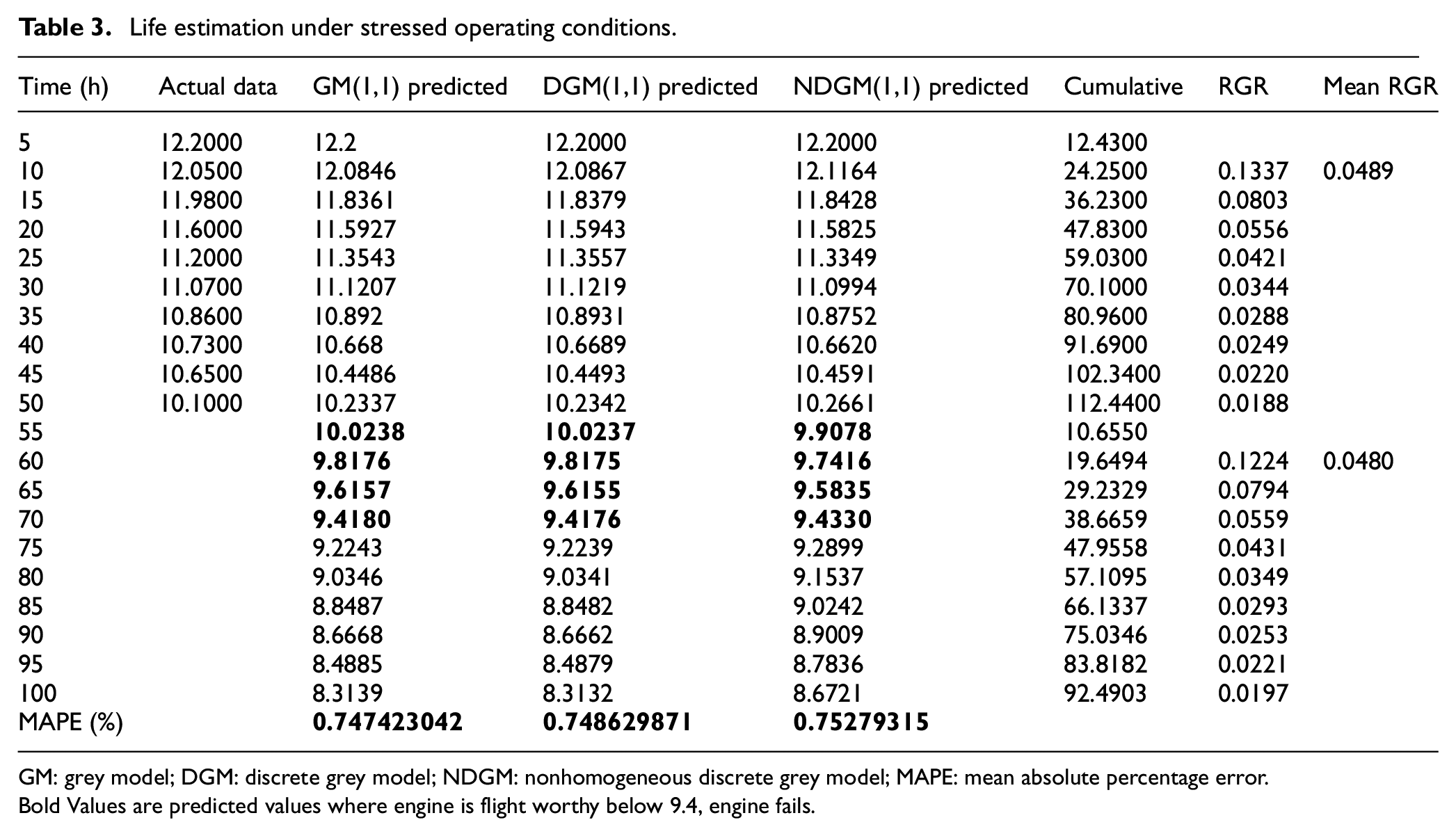
GM: grey model; DGM: discrete grey model; NDGM: nonhomogeneous discrete grey model; MAPE: mean absolute percentage error.
Bold Values are predicted values where engine is flight worthy below 9.4, engine fails.
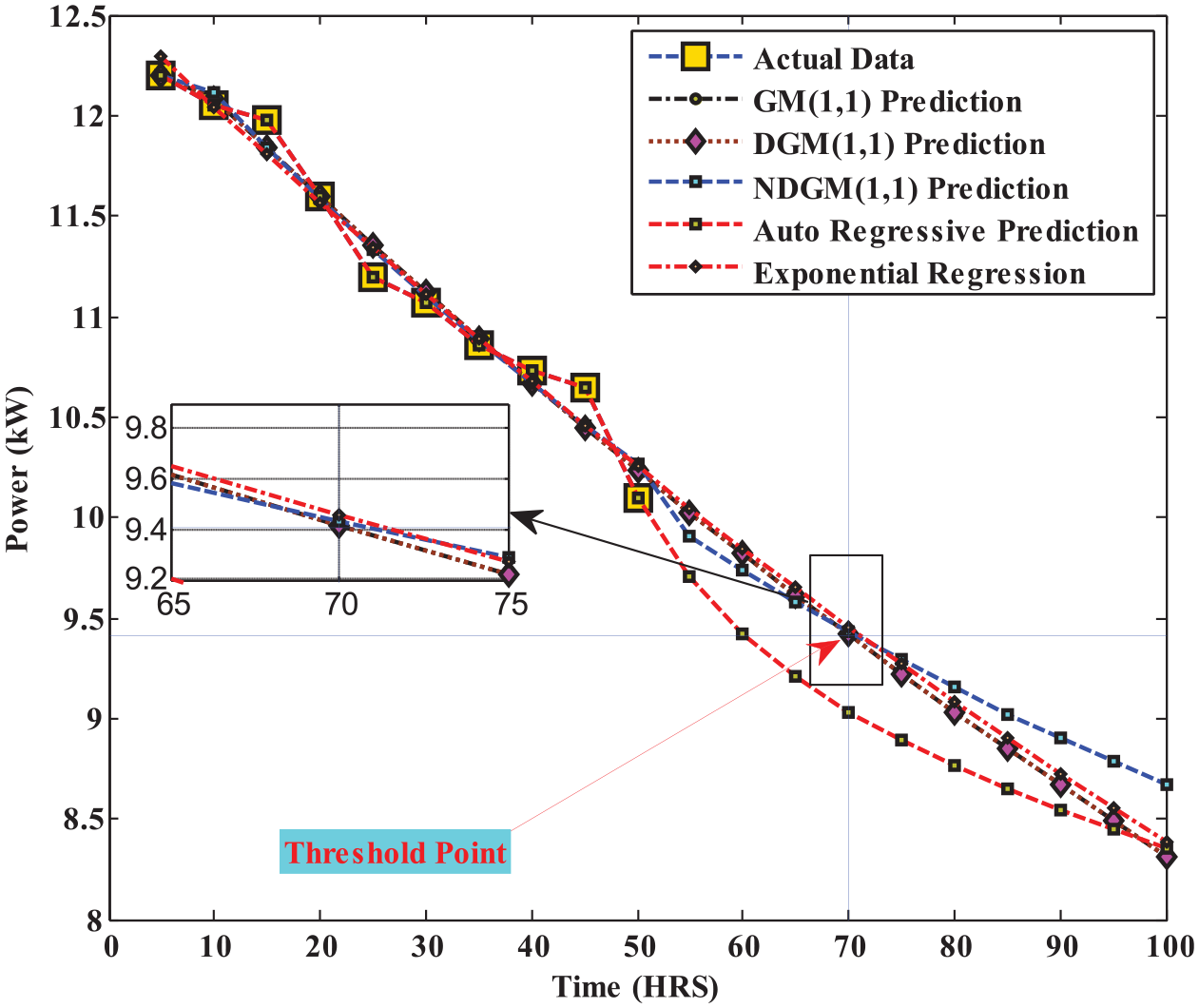
Grey forecasting of service life under stressed operating conditions.
The power value of 9.40 kW is the threshold value, below which the UAV cannot fly or is unsafe for flying. Using the grey prediction model, we have estimated the service life under modified conditions. Results of mapping also show that error in modelling is deficient, which speaks of the accuracy of the model. We can see that for unidirectional data, the results of both GM(1,1) and DGM(1,1) are almost the same and NDGM(1,1) differs slightly, but that too is in close agreement with final predictive value. For grey forecasting models, the development coefficient a and grey action quantity b as mentioned in equations (11) and (14) can be calculated using grey forecasting software and are given as, a= 0.0208 and b= 12.4649 for
Such small changes cannot be modelled or predicted by simple statistical tools as they are unable to extract hidden information from a limited or sparse data set. Different forecasting tools such autoregressive method (ARM), ARMA and autoregressive integrated moving-averages are also used to predict the life of the engine, but the accuracy of these models is not comparable with grey forecasting models. From Figures 6 and 7, it is clear that autoregressive prediction does not match both grey forecasting as well as OEM specified life under normal operation.
Conclusion
The dual use of technology, especially for complex applications, employs the operation of equipment or components at an extended range of stress conditions. The fatigue life for most of the equipment is unknown and usually less than documented service life by the OEM. In order to ensure the safe and reliable operation of such type of equipment, it is necessary to estimate fatigue life and prevent failure by predicting the RUL under the fatigue environment. The effects of operating conditions on the service life of the UAV engine have been studied in this research article. All UAV engines are assigned a service life under stated operating and maintenance requirements. Grey prediction models help in estimating the fatigue life of the engine under the stated conditions. The estimated life under both standard conditions (100 h for cylinder and piston assembly and 500 h for the UAV engine) and fatigue or modified operating conditions (70 h for cylinder and piston assembly and 350 h for the UAV engine) is in close agreement with the service life mentioned in the literature and observed during operation. The proposed research helps in predicting failure, rescheduling part replacements and maintenance to avoid unexpected risky failures of the UAV. Mechanical system degradation process if documented in safe zones of operation can help in predicting failures towards the end of life. It is also concluded that the grey prediction models can best be applied to predict early failure when the available field or testing data are limited. Reliability engineering depends on the failure and degradation data, and grey prediction tools can be applied for RUL estimation and reliability calculation more effectively than standard stochastic techniques.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.