This paper investigates the issue of finite-time tracking control for flexible-joint robots. In the design scheme, the unknown continuous function is identified by a fuzzy system. By introducing the command filter technique, “explosion of complexity” problem which arises from repeated differentiation of virtual controllers is avoided. Meanwhile, errors resulting from the first-order filters can be reduced with the introduced compensation signal. Besides, the proposed method ensures that the tracking performance could be achieved within a limited time. Eventually, the simulation is given to demonstrate the effectiveness of the proposed scheme.
Compared to the rigid-joint robots, flexible-joint (FJ) robots have many advantages of high performance, such as light mass, small size, and low energy consumption. They have been widely studied in the past decades.1–5 Therefore, the research on tracking control of FJ robots also is of great significance.6–8 For example, based on the singular perturbation method, Kim and Croft8 realize the full-state tracking control of FJ robots. With the aid of the tan-type barrier Lyapunov function, Sun et al.9 propose an adaptive tracking controller for FJ robot systems with full-state constraints. In fact, the FJ robot system is a typical under-actuated system, and the research about this kind of system can refer to the wheeled inverted pendulum system,10 the crane system,11,12 and so on.
The backstepping method is used in many of the above papers; however, one of its disadvantages is that it requires repeated derivatives, which can result in “explosion of complexity” problem and increase the complexity of controllers, especially for the system with a higher dimension. Although the above troubles were handled by the dynamic surface control (DSC) method in previous works,13–19 errors arising from the filters are not solved and the quality of the controller is also greatly reduced in this way. Another way is to apply the command filter technique to the backstepping design, by which the first problem can be successfully avoided. By introducing the compensated signal, the drawback of the DSC can be overcome (see the work by Farrell et al.,20 Hu and Zhang,21 and Niu et al.22). Considering the uncertain nonlinear systems with actuator faults, Li23 developed a fault-tolerant control scheme by the aid of command filter design. For the switched nonlinear systems in Hou and Tong,24 the issue of output feedback control is addressed with the command filter backstepping technique. For nonlinear systems with saturation input, the finite-time tracking control problem with command filter is investigated in Yu et al.25
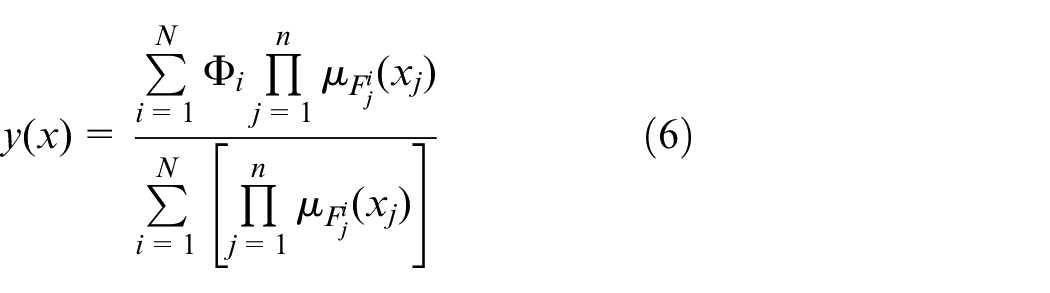
As we know, due to the ability to deal with structural uncertainty, the adaptive control method is widely employed to address uncertain nonlinear systems. With the quality of approximating unknown function, fuzzy logic systems (FLS) play a crucial part in handling the unknown items needed in control design. Therefore, the successful application of FLS in adaptive control can properly avoid burdensome computations and significantly improve the control performance of systems; many results have been obtained.26–30 With the help of Nussbaum-type function in Sun et al.,27 an adaptive fuzzy control method is proposed for the nonlinear systems with unknown control directions. For the high-order stochastic nonlinear systems, Sun et al.28 consider the issue of reduced adaptive fuzzy control. Similarly, the unknown and uncertainty problems in this paper are also addressed by the adaptive fuzzy control scheme.
Inspired by the above works, this paper studies the problem of finite-time tracking control for FJ robots and develops an adaptive fuzzy control algorithm with the help of the command filter technique. The main contributions are summarized as follows:
Compared with the design in Sun et al.,9 the explosion of complexity problem is avoided by applying the command filter technique to the backstepping design. Thus, the computing burden is also reduced to some extent. With the aid of compensated signals, the errors resulting from the utilization of DSC in Liu and Wu15 can be removed.
Different from the existing schemes that can only guarantee infinite-time stability, this paper considers the convergence rate of tracking error and makes full use of the finite-time stability criterion to design an adaptive fuzzy controller, which ensures that the tracking error can achieve practical finite stable.
System description and preliminaries
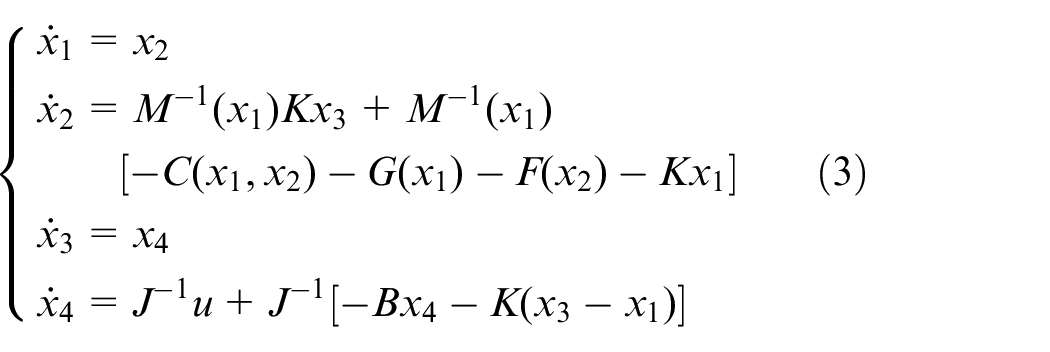
The dynamic model of an n-link FJ robot can be expressed as
in which represent the link position, velocity, and acceleration vectors, respectively. stands for the inertia matrix that is symmetric and positive definite, is the Coriolis and centripetal forces, represents the gravity vector, and denotes the friction term. represent the rotor angular position, velocity, and acceleration vectors, respectively. are constant positive definite diagonal matrices and denote the joint flexibility, the actuator inertia, and the natural damping term, respectively. is the torque input at each actuator.
The goal of design is to construct the adaptive tracking controller which can guarantee that the link position tracks the target signal in a finite time and all signals in the closed-loop system remain bounded, where , and are bounded.
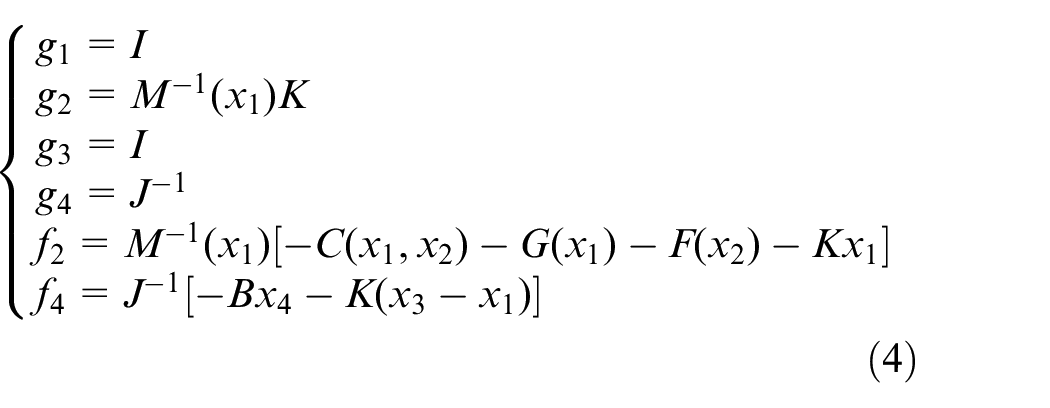
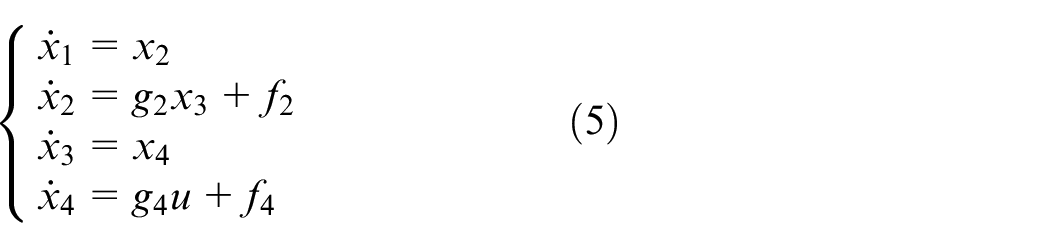
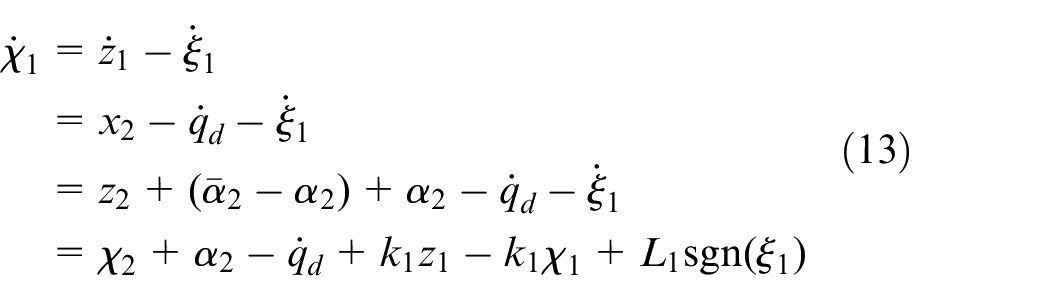
Let , , , and , then equations (1) and (2) can be converted into
Next, we will introduce some definitions and lemmas that are useful to achieve control objective.
Definition 1
For the nonlinear system , the equilibrium is practical finite-time stable, if for any initial condition there exists a constant and the settling time such that31
Lemma 1
For any real numbers , , , if there exists the function satisfying23
then the trajectory of is practical finite-time stale, and the settling time satisfies
Consider the nonlinear system (equation (3)), under the virtual controller (equations (17), (25), and (31)), the actual controller (equation (39)), and the adaptive law (equation (40)), the tracking error is practical finite stable and all signals in the resulting system are bounded.
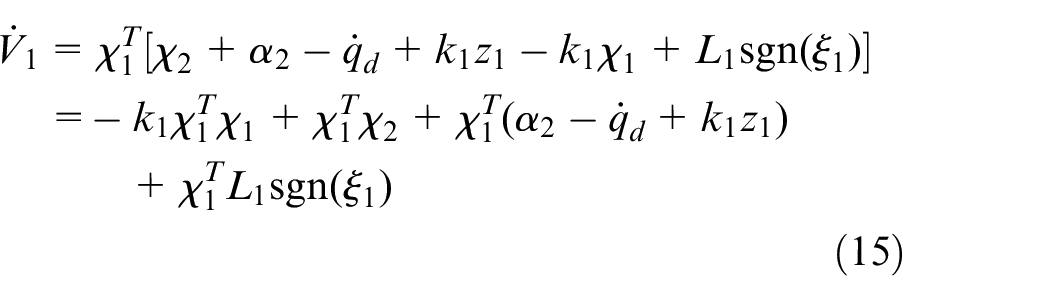
Applying Lemma 1, we can draw the following conclusion
and is bounded in a fixed time . Because , we can conclude that is convergent in a fixed time if is bounded. Next, we will deal with this problem. Construct the Lyapunov function
It is concluded that
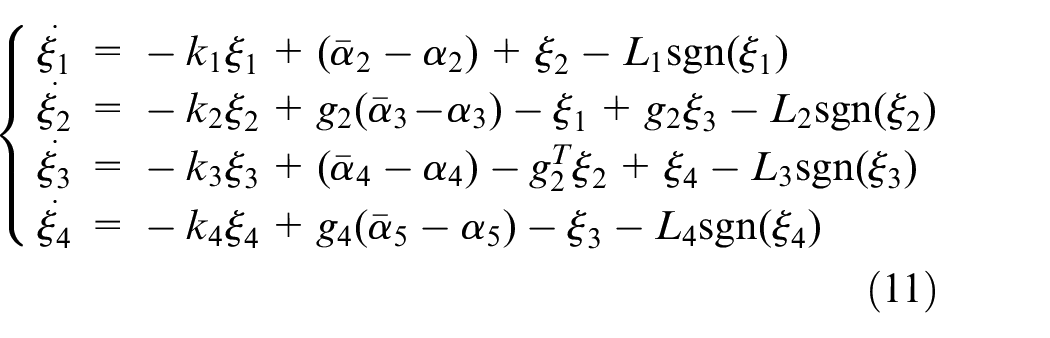
According to the lemma in Farrell et al.,20 can be obtained in the fixed time with a known constant . Hence, we obtain the following conclusion by choosing a suitable matrix
where and . Based on Lemma 1, we know that can converge to the origin in a finite time . It can be concluded that is practical finite stable within the fixed time .
Choose the Lyapunov function as
From equation (45), we obtain and , which means that and are bounded. , then is bounded and must be bounded. is bounded since is the function of , , and . So all signals in the resulting system are bounded. The proof is completed.
Simulation example
To examine the efficiency of the proposed approach, we will carry out a simulation study for the single-link FJ manipulator
where . Let , , , ,, , and , where and are unknown parameters. is the expected trajectory. The following equations are the fuzzy membership functions required in the simulation
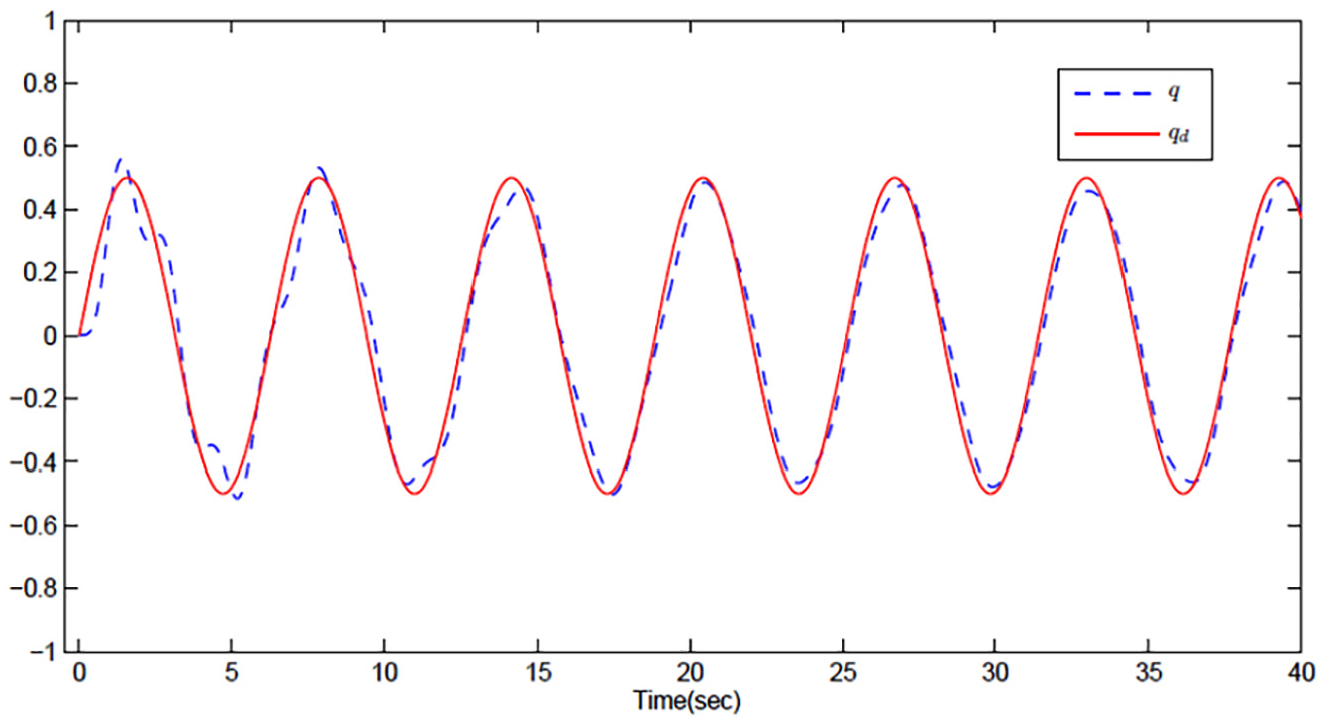
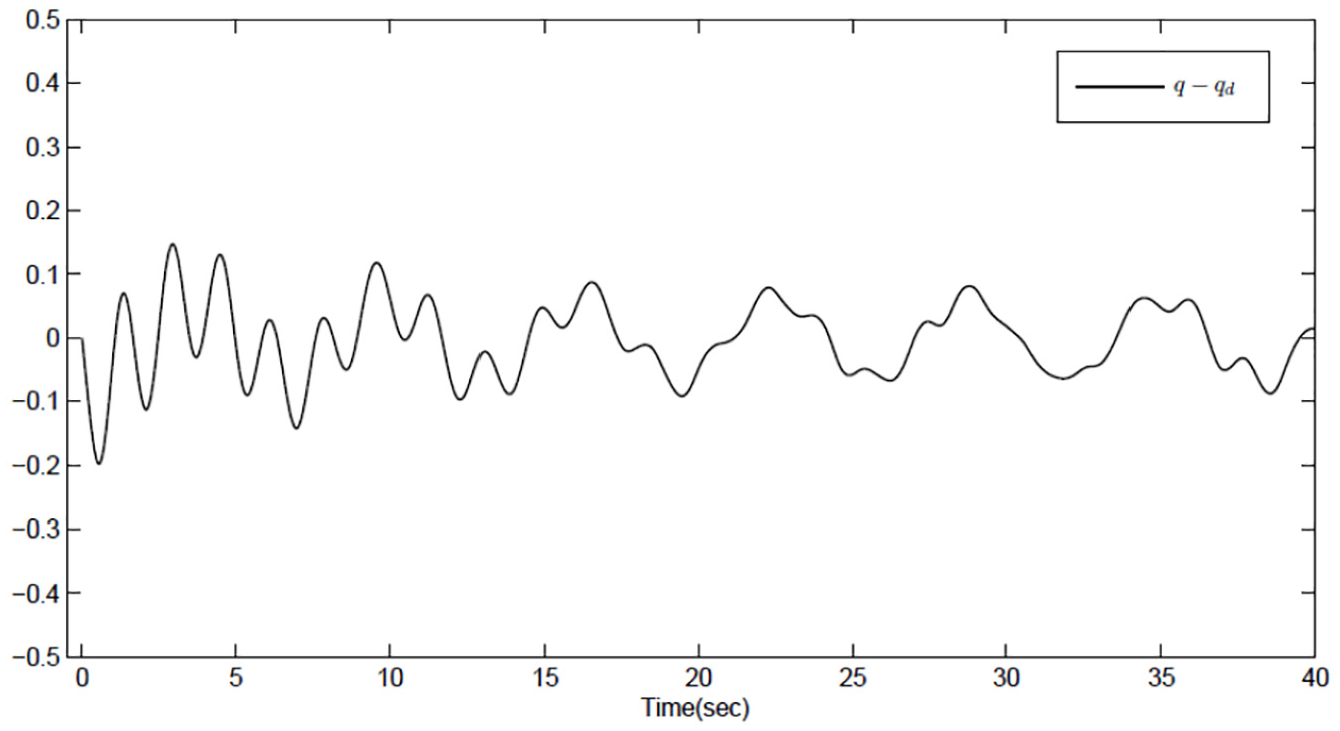
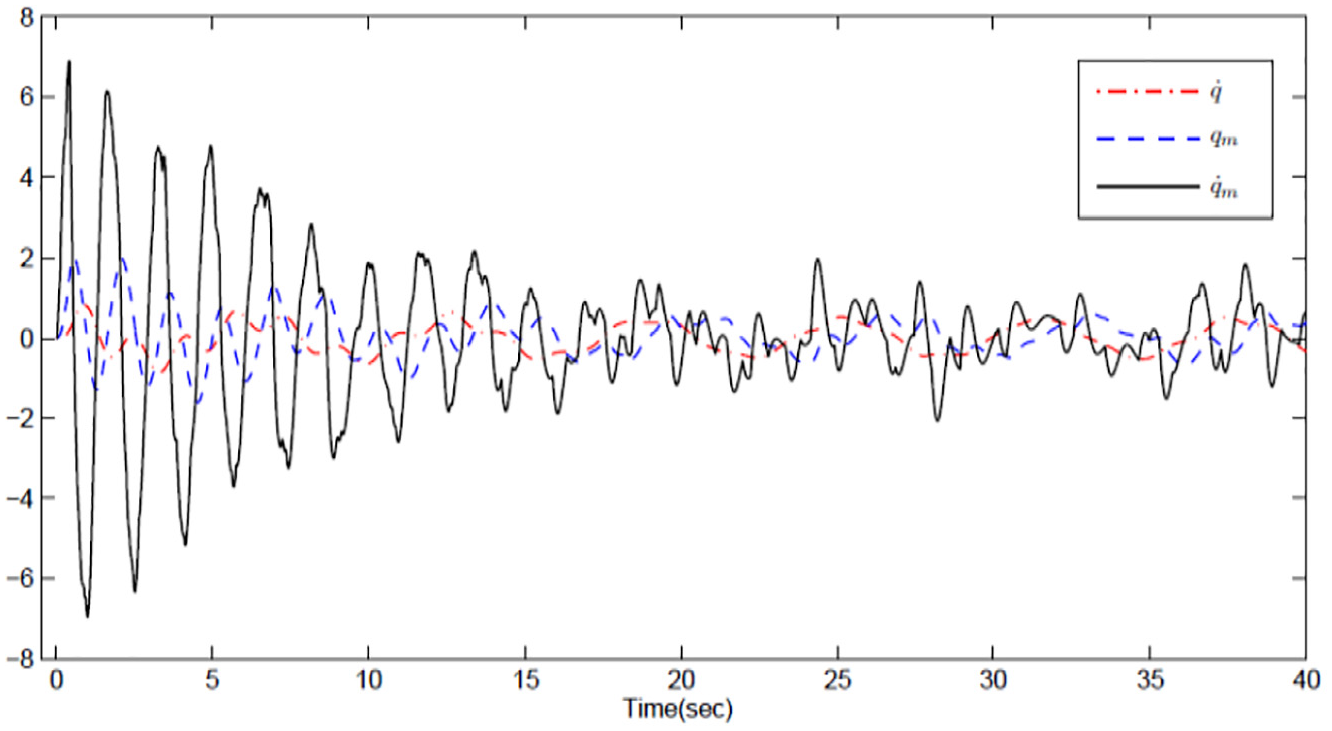
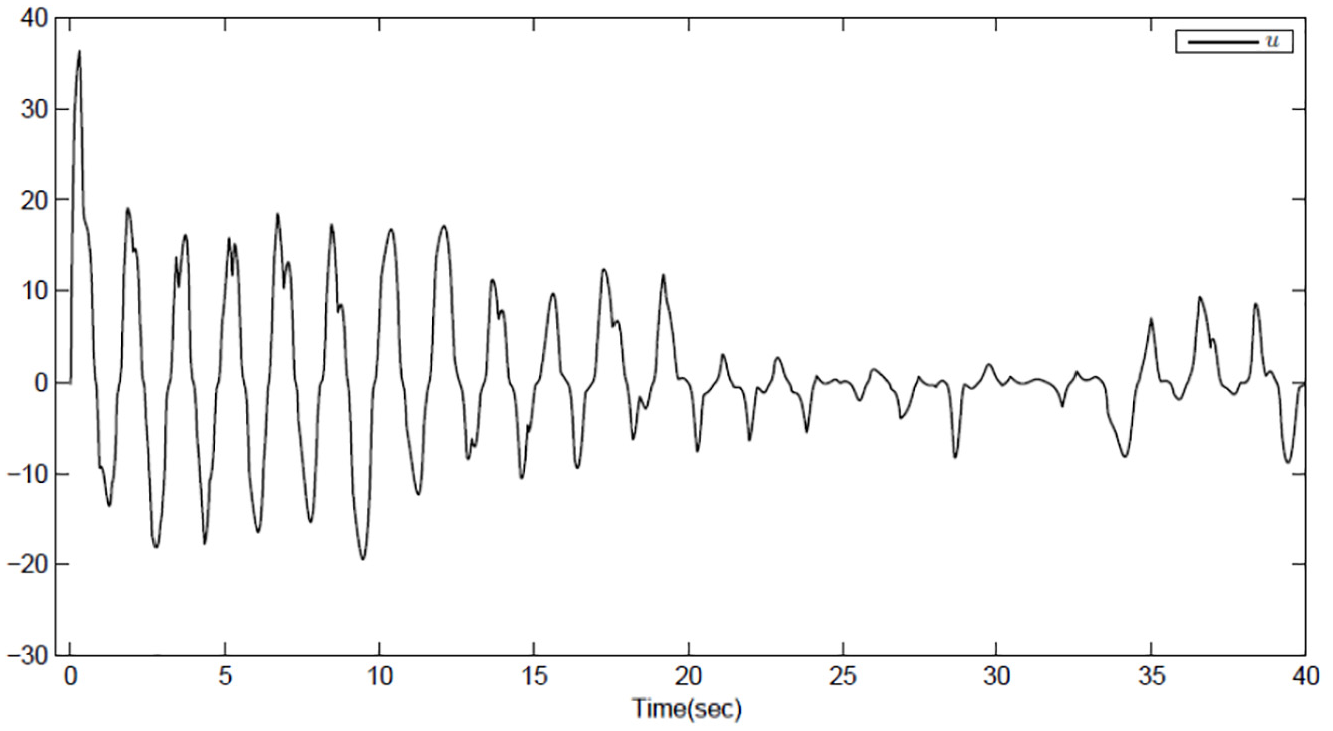
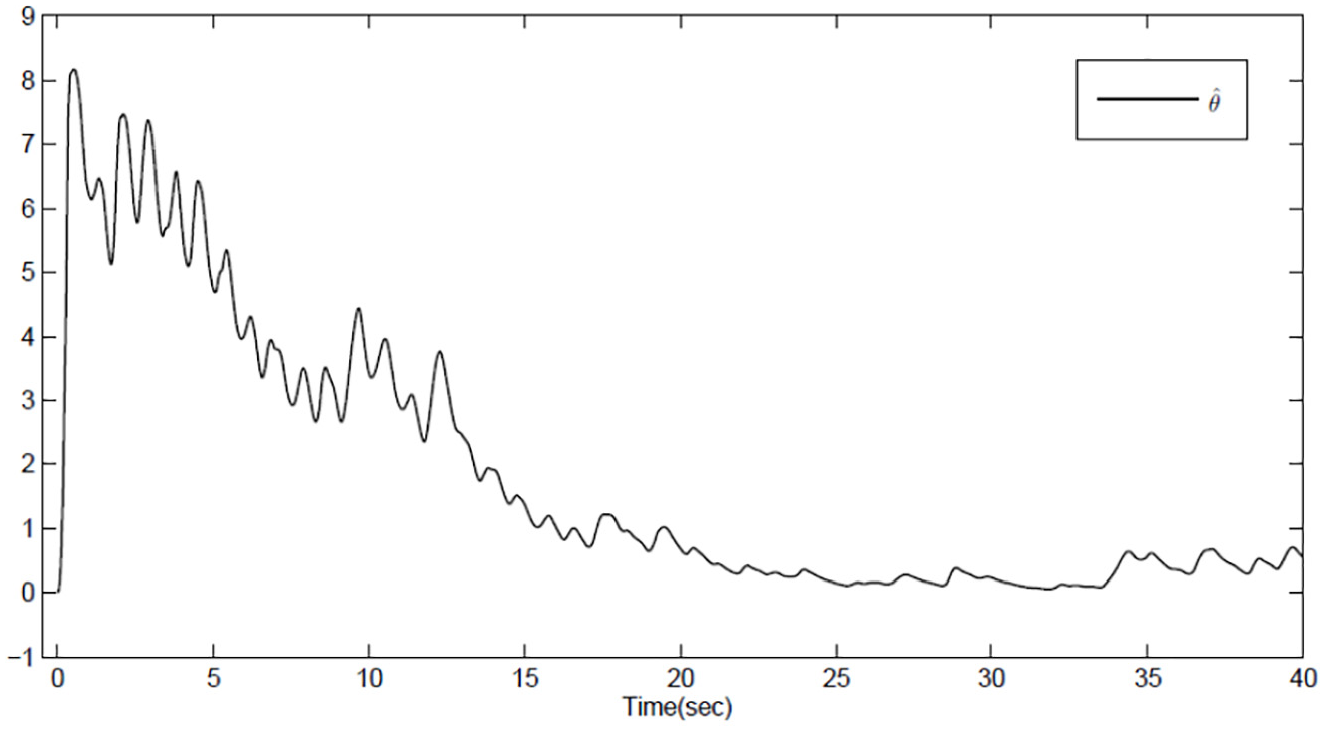
To achieve the control objective, we construct the virtual and actual controllers as equations (17), (25), (31), and (39) according to the method previously designed. Figures 1–5 show the simulation results under the initial conditions , , , and . Figure 1 expresses the trajectories of the position state and reference signal . The trajectory of is shown in Figure 2, which indicates that can converge to a small neighborhood of zero in the finite time. That is, position state can follow target signal within a limited time. Figures 3–5 are the trajectories of states , , , input , and adaptive law , respectively. It is found that states , , , input , and adaptive law are bounded. As a result, the proposed method can achieve the control objective.
The trajectories of and
The trajectory of
The trajectories of states , , and .
The trajectory of input .
The trajectory of adaptive law .
Conclusion
In this paper, the proposed scheme settles the issue of finite-time tracking control for FJ robots. With the help of the command filtered technology, both explosion of complexity and singularity problems in the standard backstepping design are avoided. By the aid of the finite-time control technique, the tracking error can achieve convergence quickly. The effectiveness of the proposed scheme is illustrated by simulation results. In this research direction, how to apply command filtered technology to under-actuated mechanical systems is meaningful work, such as the crane system.34–36
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China under Grants 61603170 and Support Plan for Outstanding Youth Innovation Team in Shandong Higher Education Institutions under Grant 2019KJI010.
ORCID iD
Wei Sun
References
1.
SpongMW.Adaptive control of flexible joint manipulators. Syst Control Lett1989; 13(1): 15–21.
2.
HanJChenY-HZhaoXM, et al. Optimal design for robust control of uncertain flexible joint manipulators: a fuzzy dynamical system approach. Int J Control2018; 91(4): 937–951.
3.
LiYMTongSCLiTS.Adaptive fuzzy output feedback control for a single-link flexible robot manipulator driven DC motor via backstepping. Nonlinear Anal-Real2013; 14(1): 483–494.
4.
AbdollahiFTalebiHAPatelHV.A stable neural network-based observer with application to flexible-joint manipulators. IEEE T Neural Networ2006; 17(1): 118–129.
5.
KimMJChungWK.Disturbance-observer-based PD control of flexible joint robots for asymptotic convergence. IEEE T Robot2015; 31(6): 1508–1516.
6.
KimMSLeeJS.Adaptive tracking control of flexible-joint manipulators without overparametrization. J Robotic Syst2004; 21(7): 369–379.
7.
ChangY-CWuM-F.Robust tracking control for a class of flexible-joint time-delay robots using only position measurements. Int J Syst Sci2016; 47(14): 3336–3349.
8.
KimJCroftEA.Full-state tracking control for flexible joint robots with singular perturbation techniques. IEEE T Contr Syst T2017; 27(1): 63–73.
9.
SunWSuS-FXiaJW, et al. Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints. IEEE T Syst Man Cyb2019; 49(11): 2201–2209.
10.
SunWSuS-FXiaJW, et al. Adaptive tracking control of wheeled inverted pendulums with periodic disturbances. IEEE T Cybernetics. Epub ahead of print 20December2018. DOI: 10.1109/TCYB.2018.2884707.
11.
SunNFuYYangT, et al. Nonlinear motion control of complicated dual rotary crane systems without velocity feedback: design, analysis, and hardware experiments. IEEE T Autom Sci Eng. Epub ahead of print 14January2020. DOI: 10.1109/TASE.2019.2961258.
12.
ZhangMZhangYOuyangH, et al. Adaptive integral sliding mode control with payload sway reduction for4-DOF tower crane systems. Nonlinear Dyn. Epub ahead of print 18January2020. DOI: 10.1007/s11071-020-05471-3.
13.
WangDHuangJ.Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE T Neural Networ2005; 16(1): 195–202.
14.
EdalatiLSedighAKShooredeliMA, et al. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech Syst Signal Pr2018; 100: 311–329.
15.
LiuZ-GWuY-Q.Modelling and adaptive tracking control for flexible joint robots with random noises. Int J Control2014; 87(12): 2499–2510.
16.
YuJPShiPDongWJ, et al. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors. IEEE T Neur Net Lear2015; 26(3): 640–645.
17.
LiYMTongSCLiTS.Adaptive fuzzy output feedback dynamic surface control of interconnected nonlinear pure-feedback systems. IEEE T Cybernetics2015; 45(1): 138–149.
18.
LiuY-HHuangLPXiaoDM.Adaptive dynamic surface control for uncertain nonaffine nonlinear systems. Int J Robust Nonlin2017; 27(4): 535–546.
19.
ZhangTPXiaMZYiY, et al. Adaptive neural dynamic surface control of pure-feedback nonlinear systems with full state constraints and dynamic uncertainties. IEEE T Syst Man Cyb2017; 47(8): 2378–2387.
20.
FarrellJAPolycarpouMSharmaM, et al. Command filtered backstepping. IEEE T Autom Control2009; 54(6): 1391–1395.
21.
HuJCZhangHH.Immersion and invariance based command-filtered adaptive backstepping control of VTOL vehicles. Automatica2013; 49(7): 2160–2167.
22.
NiuHYuJPYuHS, et al. Adaptive fuzzy output feedback and command filtering error compensation control for permanent magnet synchronous motors in electric vehicle drive systems. J Frankl Inst2017; 354(15): 6610–6629.
23.
LiY-X.Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica2019; 106: 117–123.
24.
HouYXTongSC.Command filter-based adaptive fuzzy backstepping control for a class of switched nonlinear systems. Fuzzy Set Syst2017; 314: 46–60.
25.
YuJPShiPDongWJ, et al. Command filtering-based fuzzy control for nonlinear systems with saturation input. IEEE T Cybernetics2017; 47(9): 2472–2479.
26.
WangMChenBDaiS-L.Direct adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear systems. Fuzzy Set Syst2007; 158(24): 2655–2670.
27.
SunWXiaJWZhuangGM, et al. Adaptive fuzzy asymptotically tracking control of full state constrained nonlinear system based on a novel Nussbaum-type function. J Frankl Inst2019; 356(4): 1810–1827.
28.
SunWSuS-FDongGW, et al. Reduced adaptive fuzzy tracking control for high-order stochastic nonstrict feedback nonlinear system with full-state constraints. IEEE T Syst Man Cyb. Epub ahead of print 5March2019. DOI: 10.1109/TSMC.2019.2898204.
29.
TongSCLiYM.Observer-based fuzzy adaptive control for strict-feedback nonlinear systems. Fuzzy Set Syst2009; 160(12): 1749–1764.
30.
WangHQLiuWXQiuJB, et al. Adaptive fuzzy decentralized control for a class of strong interconnected nonlinear systems with unmodeled dynamics. IEEE T Fuzzy Syst2018; 26(2): 836–846.
31.
ZhuZXiaYQFuMY.Attitude stabilization of rigid spacecraft with finite-time convergence. Int J Robust Nonlin2011; 21(6): 686–702.
32.
WangFChenBLiuXP, et al. Finite-time adaptive fuzzy tracking control design for nonlinear systems. IEEE T Fuzzy Syst2018; 26(3): 1207–1216.
33.
SunWSuS-FWuYQ, et al. Adaptive fuzzy control with high-order barrier Lyapunov functions for high-order uncertain nonlinear systems with full-state constraints. IEEE T Cybernetics. Epub ahead of print 15January2019. DOI: 10.1109/TCYB.2018.2890256.
34.
ChenHSunN.Nonlinear control of underactuated systems subject to both actuated and unactuated state constraints with experimental verification. IEEE T Ind Electron. Epub ahead of print 15October2019. DOI: 10.1109/TIE.2019.2946541.
35.
SunNLiangDKWuYM, et al. Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints. IEEE T Ind Inform2020; 16: 969–979.
36.
ZhangMHZhangYFJiB, et al. Modeling and energy-based sway reduction control for tower crane systems with double-pendulum and spherical-pendulum effects. Meas Control53: 141–150.