
Abstract
This paper presents the disturbance and uncertainty suppression by using the nonlinear disturbance observer and an extended state observer for a nonlinear active magnetic bearing system. Otherwise, the chattering free is assured by a fuzzy controller, where the fixed sliding mode surface boundary is regulated by fuzzy boundary layer. The stability of the system is guaranteed by Lyapunov condition. First, the nonlinear disturbance observer is presented to estimate the disturbance from outside of the system. Second, the system parameter variations are estimated by an extended state observer with the construction via the estimated disturbance value. Third, the proportional–integral–derivative sliding mode surface has been constructed due to the chattering values that appear from the high-frequency switching control values. Fourth, these chattering values are reduced by using a Mamdani fuzzy logic control. The proposed control methodology was given by the MATLAB simulation. The overshoot value that is equal to zero, narrow settling time, and the average distance tracking error value which is quite small are archived.
Keywords
Introduction
Active magnetic bearing system (AMBS) has been applied in many areas in industrial system. AMBS offer a system with noncontact working between the stator and rotor, which leads the practical system to reduce and maintain costs, device life, and no lubrication. 1 Taking an overview on AMBS, the fuzzy logic control and sliding mode control have been applied to control the suspension AMBS. 2 A robust observer–based optimal linear quadratic tracker for 5-degree-of-freedom sampled data AMBS. 3 The robust nonsingular terminal sliding mode control was applied to suspension AMBS. 4 the proposed method ignored the outside disturbance effects analysis, the method proposed by Su et al. 2 is very good but complicated in real practice, and the method proposed by Tsai et al. 3 is also complicated to understand how much the lumped uncertainties are bounded. This paper reveals new control methodology; it is very easy to understand and apply in practice. Furthermore, the outside disturbance, system uncertainty, and chattering are mostly rejected.
In industrial system, physical process system contains uncertainty and affected by outside disturbance. With an AMBS, the uncertainty occurs from the gravity force, winds, unmolded system dynamic, and the parameter variation. The simple structure of the magnet poles will lead system to very sensitive with outside disturbance. The inability to build dynamic system is the requirement of the disturbance and uncertainty estimation. In recent decades, the disturbance and unknown input estimation is one of the most important topics in process control. The concepts of nonlinear disturbance observer (DOB) were revealed from the past decades.5,6 It has been developed to high-order DOB, 7 and implemented to Euler–Lagrange system and underwater vehicle system.8,9 In recent years, nonlinear DOB was designed for robotic manipulators 10 and mobile wheeled inverted pendulum, 11 and combined control of robotic system with exogenous disturbance was presented. 12 The disturbance could be rejected and estimated by equipping the DOB and also the extended state observer. A radial basis function neural network was presented based on an extended DOB for the velocity control loop. 13 The extended state observer has been applied to estimate the disturbance values. The extended state observer–based fuzzy sliding mode control was implemented for 3-degree-of-freedom humanoid arm. 14 This proposed methodology used the fuzzy logic to tune the sliding mode control gain, and disturbance has been calculated by the difference of estimated system state and measured system state. The same way to construct the disturbance value was used.15–19 The disturbance and uncertainty estimation has been proposed. 20 The combination of system state feedback and DOB was proposed for the AMBS 3 and for mismatched disturbance system. 21 This paper proposes the disturbance and uncertainty rejection based on extended state observer and via the nonlinear DOB, which means the disturbance needs to be defined first by an observer, and then the system state estimation is constructed with estimated DOB and the error of estimated state and measured state through the extended state formulation. The different value of measured system state and estimated system state is referred to as system parameter variation or is called as uncertainty value. The background controller is used, which is named as sliding mode control.
Sliding mode control was proposed in the middle of 1950s; its property includes the equivalent control and switching control, which forces the system to be in stable state on predefined manifold and converge on the surface, respectively.22,23 The main disadvantage problem of the sliding mode control is centered on switching control chattering, which occurred from high hitting control gain and the sliding mode boundary layer value. Many proposed methodologies were implemented to optimize the chattering value,24–27 and the boundary layer approximation problems have been revealed in the works of Igor 28 and Chyun. 29 These papers just focused on the effectiveness of the boundary layer thickness. Do et al. 30 applied the nonsingular terminal sliding mode control for a nonlinear robot manipulator. Their proposed method achievements are good, but the sliding mode boundary layer thickness was ignored. This paper proposes method to approximate the sliding mode boundary layer in comparison to previous published papers, that is, a fuzzy logic control to approximate the saturation function can be used to force the system state stay on the bounded area.
The proposed methodologies are implemented to the AMBS. The organization of this paper is as follows. First, a brief introduction about this study and the overview of previous published papers are given. Second, system mathematical model is revealed. Third, proposed control methodology is presented subsequently. Fourth, the results and the data are presented. Finally, the discussion is given.
Mathematical modeling of AMBS
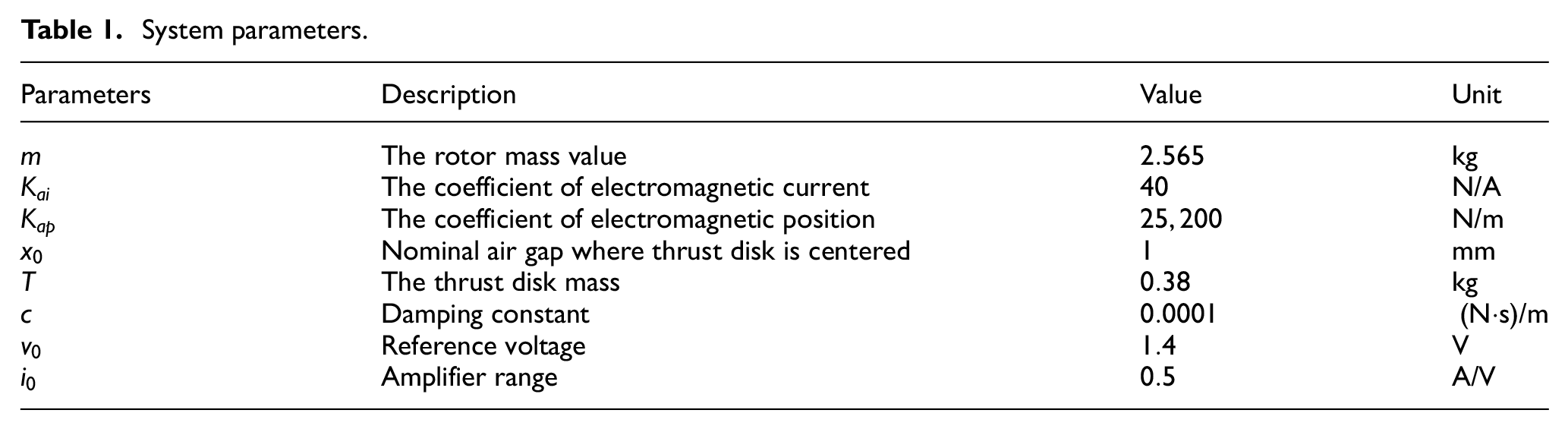
The AMBS consists of an eddy-current sensor; the sensor is used to estimate the distance of the thrust disk to the stator. Sensor input is distance value and sensor output are voltage values, where we need to convert these signals to current values by using the 0.5 A/V amplifiers: a computer with 1 multi-channel analog to digital car with 16 bits revolution and 1 multi-channel digital-to-analog car with 16 bits revolution. This research aims to control the position of the embedded thrust disk on the vertical rotor. The details are represented in Figure 1.


where
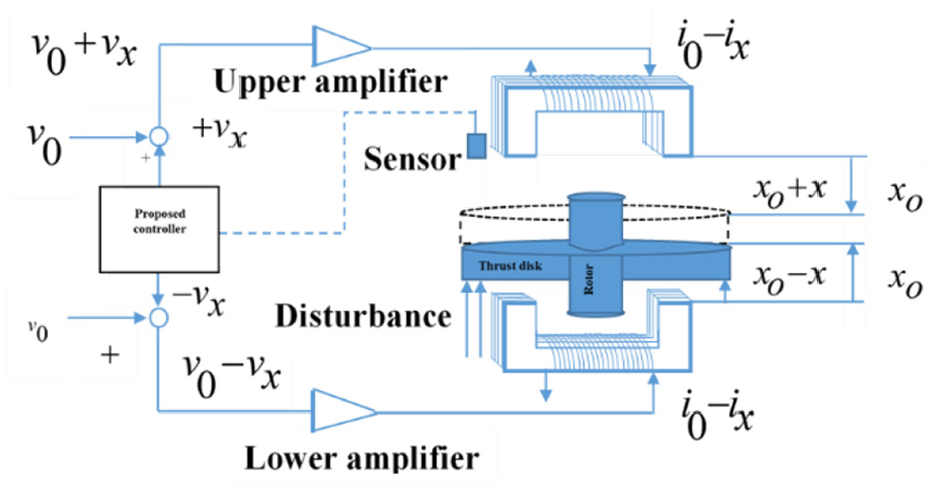
Active magnetic bearing system.
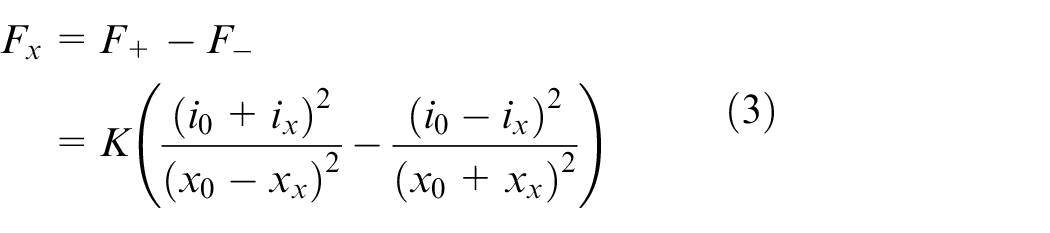
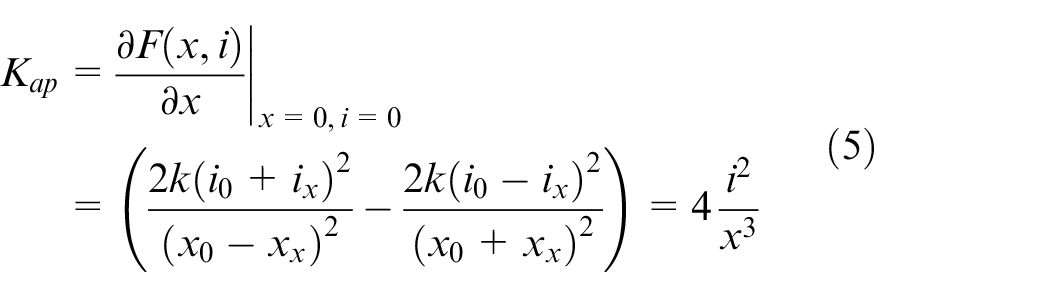
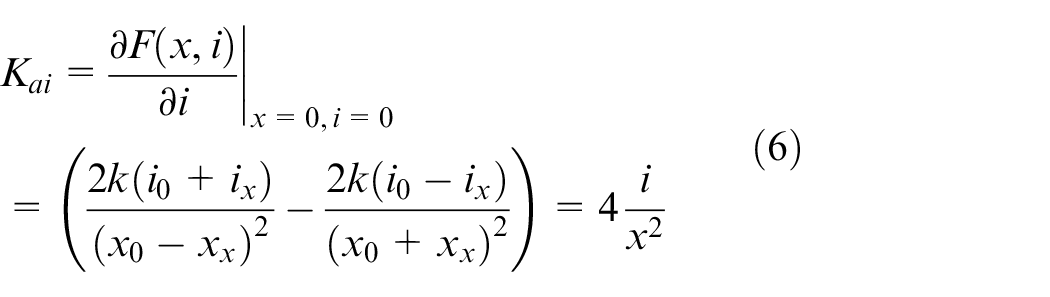
Using Taylor expansion of equation (3) leads to

with
Following the Newton II law

where

or

where

or

where

where
Equation (12) can be written as
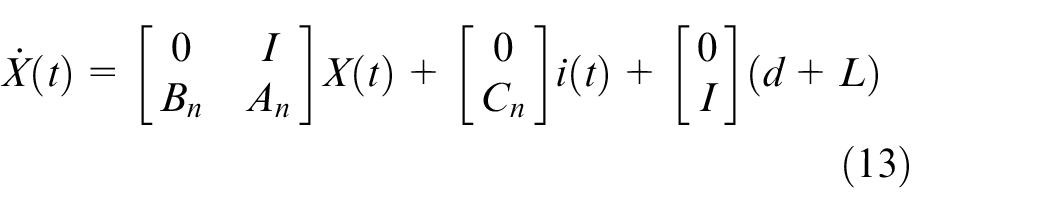
where
System parameters.
Proposed approach
This section presents the proposed control methodologies. The first one is DOB for AMBS. Second, extended state observer is constructed via the estimated disturbance value, and the disturbance and uncertainty feedback is investigated. Finally, sliding mode control is built with a fuzzy rule for tuning the sliding surface boundary layer thickness.
Nonlinear DOB
The system from equation (11) is represented as

or

where the uncertainty is hidden in terms of system state and control matrices, the system state vector. This section presents the nonlinear DOB as
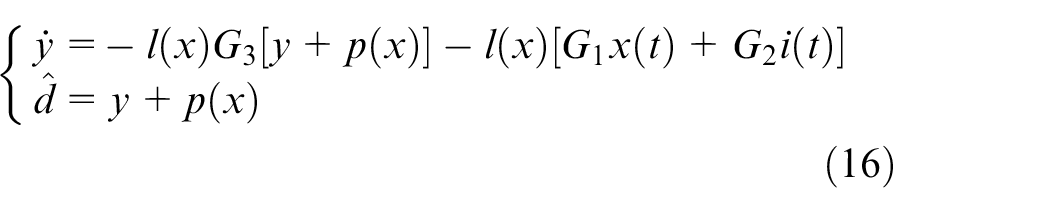
where

where

Taking the derivative of the error of estimated and real disturbance will lead to
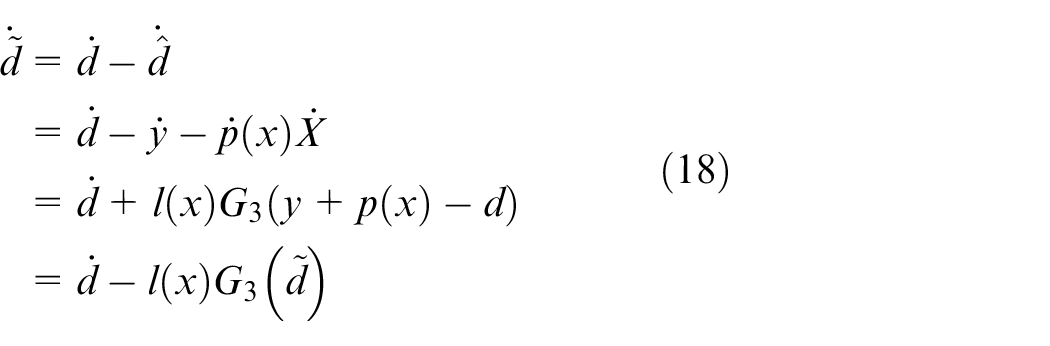
Assumption that

Taking the derivative of equation (17) will lead to
Then, we have

The control signal is updated as

where
Uncertainty estimation based on extended state observer via estimated disturbance value
The extended state observer is applied to force the uncertainty of the system to converge to the zero value. The system state is modified as

where
The
The figuration of the uncertainty is considered as

The parameters of the characteristic equation are chosen as long as equation (26) is stable following Hurwitz’s rule.
Boundary layer stability of fuzzy sliding mode control
Sliding mode control
The sliding mode controls are included as an equivalent control value and a switching control value. Every system state will slide and converge on a predefined state. The sliding mode control surface needs to be defined such that the term of convergence of the sliding mode surface to zero is as fast as possible. The sliding mode surface is constructed by proportional–integral–derivative (PID) type; the sliding surface input is the different value of the estimated system position and reference signal. The sliding surface is built as

Refer

Taking the derivative of equation (27) will lead to

Combining equations (10) and (29), the current is calculated as

where the derivative surface value is chosen by the term of switching control value as

In terms of reduction chattering value from switching control part, the saturation is used to replace the sign function, where

or
where

Equation (28) can be written to obtain the disturbance and uncertainty value as

or

or

The inequality (equation (36)) is satisfied when the hitting control gain should be defined as

Then the inequality (equation (32)) could be written as

Chyun 29 presented a variable thickness boundary layers for the sliding mode control; this paper dealt with the effects of layer boundary to the chattering value. In fact, the chattering also occurs from switching control gain. This paper reveals new ideas to deal with the chattering value. The fuzzy logic controller will be used to force the chattering value to zero.
Boundary layer regulation–based fuzzy logic control
Fuzzy logic is another practical mathematical addition to classic Boolean logic. 31 Fuzzy logic system includes fuzzification, inference engine, and defuzzification. The fuzzification converts the input signal into the fuzzy sets, the inference engine is used to determine the input variable and fuzzy rules, and defuzzification is used to convert the fuzzy crisp of inference engine to output value. In this paper, the fuzzy rules were chosen somehow and the output of the fuzzy is satisfied by the Lyapunov condition. This paper proposes two fuzzy controllers; all fuzzy rules are formed If–Then, and the first fuzzy system is used to approximate the hitting control gain of the sliding mode control, with multi-input and single output form as

where

When chattering occurred, the control value needs to be changed to adapt the chattering variation. In other words, the boundary layer needs to be changed; however, the boundary is bounded. The system state always tend to inside of boundary layer, which caused the chattering is free, to force the control signal more smooth, and vice versa. This paper proposes the control methodology as

In equation (33), the chattering occurs with a high switching frequency bandwidth when the sliding mode control outside the boundary value of the chattering is maximum. If sliding mode surface s is in
If
If
If
If
If
where
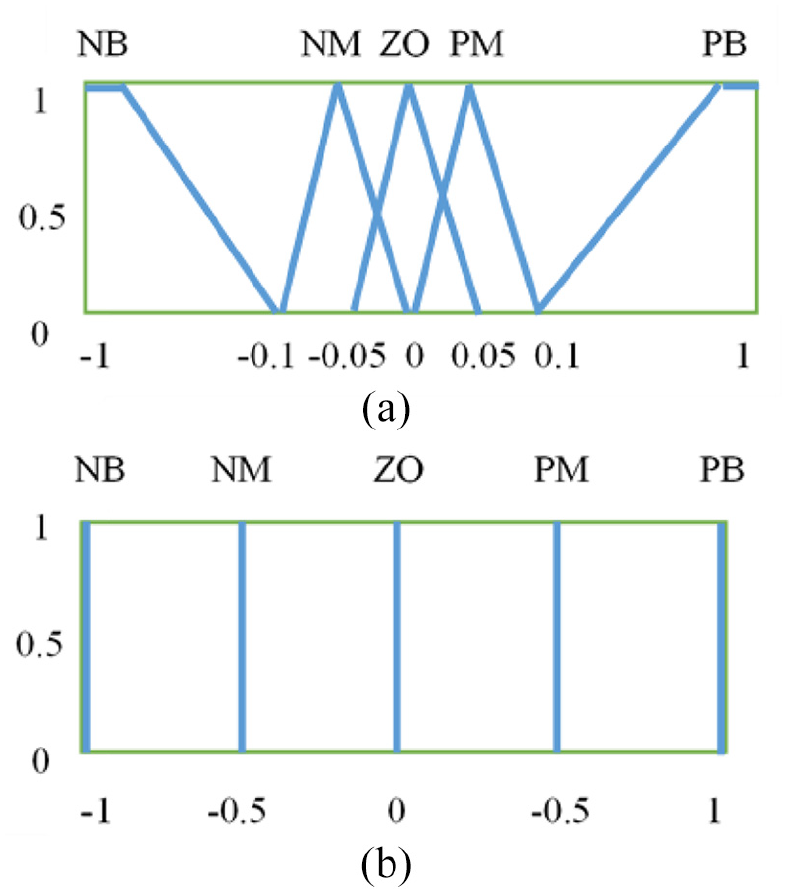
Fuzzy rules: (a) sliding mode surface and (b) fuzzy output signal.
In Figure 2, negative big is referred to NB, negative medium is referred to NM, zero is referred to ZO, positive medium is referred to PM, and positive big is referred to PB. This paper used five fuzzy rules to approximate the chattering converge to zero.
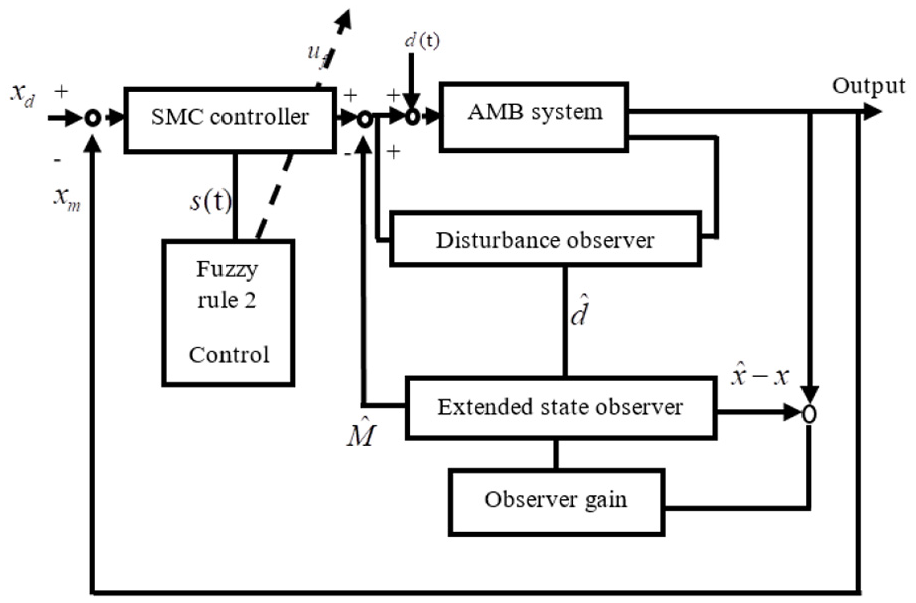
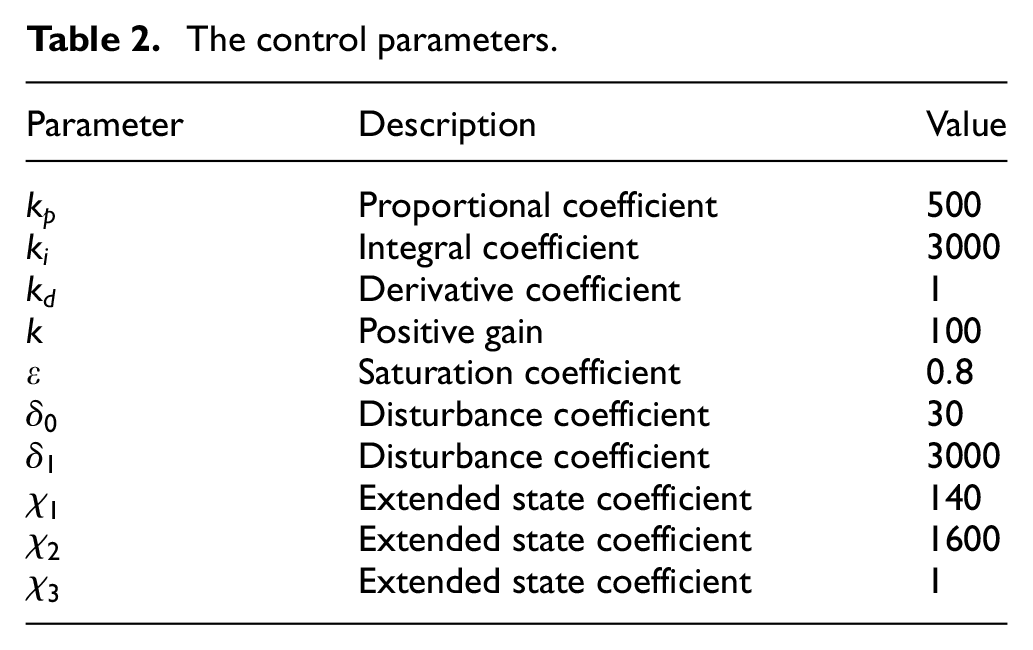
Taking the advantage of the polygonal shape, the fuzzy membership functions were selected with a linear characteristic, easy-to-obtain input and output mapping problem, and easy-to-modify parameters of the fuzzy membership function. The empirically chosen fuzzy rules need to be fulfilled in the stability condition. The fuzzy input membership function is in polygonal shape, and fuzzy output membership function is single value function. The combination of the disturbance and uncertainty feedback, the boundary layer regulation, and the system control are constructed, as shown in Figure 3 and Table 2.
Control system for active magnetic bearing system.
The control parameters.
The control methodology is constructed as shown in Figure 3; the sliding mode control input is the different signal between the measured output and desired signal. Disturbance and feedback are estimated by a nonlinear DOB.
The originality of this paper is the lump of uncertainty estimation; there, the extended state observer is built based on the observed disturbance value.
The difference of the estimated and measured states is considered as the uncertainty value; this value is considered as feedback to compensate the system parameter variation.
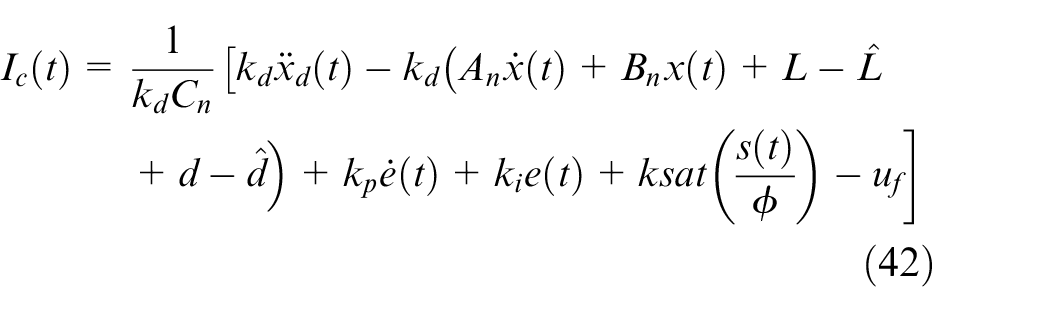
After all, the control current is
The Lyapunov condition is now represented as

or

The Lyapunov is satisfied when
An illustrative example
This part investigates about the proposed control methodology achievements. All of the results are focused on three cases as follows:
Case 1. The sliding mode control for AMBS
The control value is
This control methodology cannot guarantee the disturbance and uncertainty, and chattering will be rejected.
Case 2. The disturbance and uncertainty rejection–based observers for AMBS
The control signal is
The disturbance and uncertainty are now free.
Case 3. Boundary layer regulation–based fuzzy and sliding mode and disturbance and uncertainty rejection for AMBS
The control signal is presented in equation (42). The proposed method achievements are shown in Figure 4.
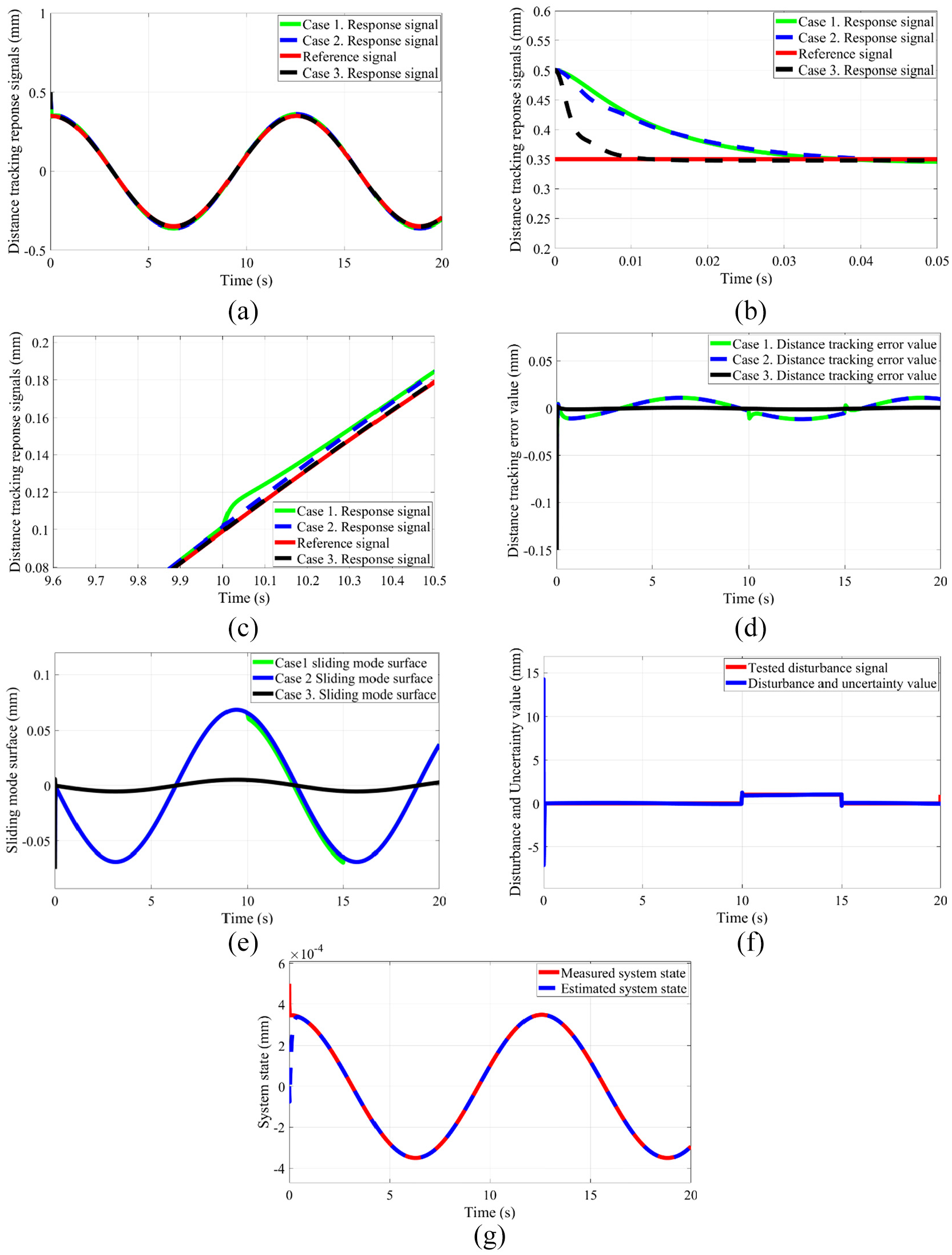
Output signals: (a) distance response signals in first 20 s, (b) distance response signals in the first 0.05 s, (c) distance response signals at the point disturbance affected on the system, (d) distance tracking error values at first 20 s, (e) sliding mode surfaces, (f) disturbance and uncertainty values, and (g) estimated and measured system states.
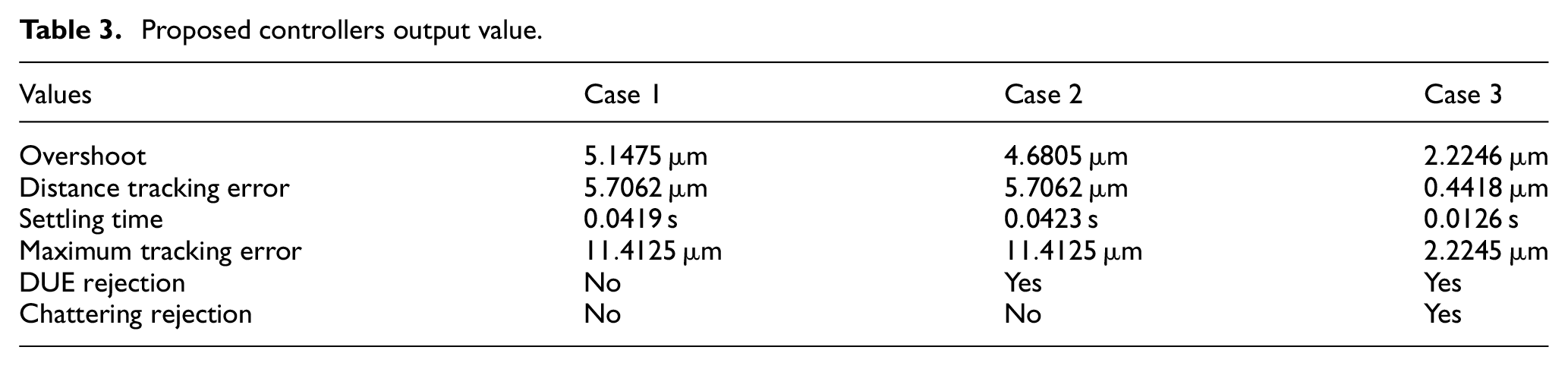
In comparison with each methodology for AMBS, the proposed control methodology with a fuzzy logic control to regulate the sliding mode boundary layer thickness, disturbance, and uncertainty-based observers is performing good that the settling time is small, overshoot is approximated to zero, and distance tracking error values are quite small. The comparison data are described in Table 3.
Proposed controllers output value.
Conclusion
A designed methodology is named effectiveness of fuzzy sliding mode control boundary layer based on disturbance, and uncertainty observers were constructed to control suspension AMBS successfully. A PID sliding surface is utilized to construct the sliding mode control surface, and the fuzzy logic control is used to regulate the layer thickness of the sliding mode controller. All models are built with an effort to keep the highly nonlinear bearing system stable. In some way, the Lyapunov is guaranteed for system stability.
A nonlinear DOB is equipped to estimate the unknown outside disturbance, and unknown parameter variation is estimated by an extended state observer. The given outside testing disturbance is almost rejected completely. The archived results are figured out that proposed methodology is good at tracking the dynamic input signal, the proposed controller can reject the output disturbance and the variation of the parameters, and chattering is almost free. The main advantages are as follows: the settling time of the proposed controller is very less, overshot value is small, and the average distance tracking error value is quite small.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.