
Abstract
Aiming at the mechanical equipment in the fault diagnosis process, the traditional Shannon–Nyquist sampling theorem is used for data collection, which faces main problems of storage, transmission, and processing of mechanical vibration signals. This paper presents a novel method of compressed sensing reconstruction for axial piston pump bearing vibration signals based on the adaptive sparse dictionary model. First, vibration signals were divided into blocks, and an energy sequence was produced in accordance with the energy of each signal block. Second, the energy sequence of each signal block was classified by the quantum particle swarm optimization algorithm. Finally, the reconstruction of machinery vibration signals was carried out using the K-SVD dictionary algorithm. The average relative error of the reconstructed signal obtained by the proposed algorithm is 4.25%, and the reconstruction time decreases by 43.6% when the compression ratio is 1.6.
Keywords
Introduction
Swashplate-type axial piston pumps are one of the power-dense types of hydraulic units and are widely used in industrial fields. 1 Figure 1 presents the schematic sketch of a swashplate-type axial piston pump. Each piston produces a reciprocation motion along with the cylinder block as the shaft rotates, and then the volume of the sealing chamber can be changed to achieve oil suction and oil delivery. The spindle contains two rolling bearings, which ensure the normal operation of the spindle at different working conditions. 2 In practice, this rotation motion of the spindle may cause bearing faults at harsh working conditions of heavy external load and high rotating speed, which directly affects the normal operation of the machine.3,4 Therefore, it is urgent to put forward a new bearing signal reconstruction method to improve the effectiveness of fault bearing diagnosis.
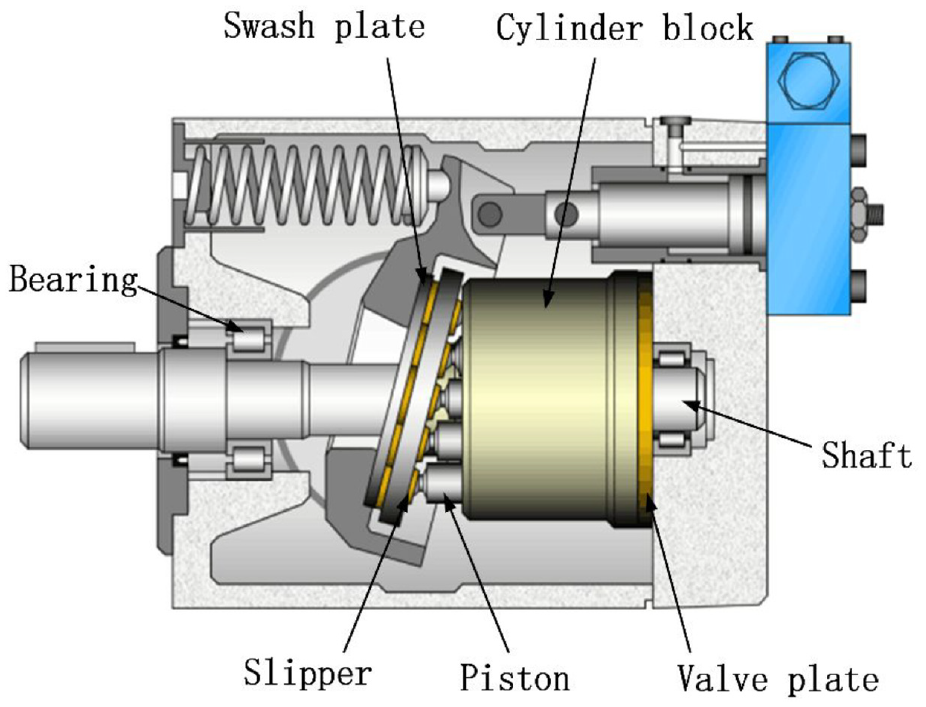
Schematic diagram of a swashplate-type axial piston pump.
In recent years, research on rolling bearing fault diagnosis has become very popular. Lu et al. 5 proposed a new fault feature extraction method to extract periodic impulse component from vibration signal. The adaptive Kurtogram method was proposed by Xu et al. 6 to diagnose bearing faults using an order statistics filter. Feng et al. 7 proposed the concentration of frequency and time method to improve the effectiveness of fault bearing time-varying feature extraction. Borghesani et al. 8 proposed a new fault diagnosis method to detect the impulse component of the bearing signal. The experimental results are compared with previous kurtosis-based indexes. Pang et al. 9 proposed a new combined fault diagnosis method to identify the fault pattern of rolling bearings. At present, some methods of time–frequency analysis are used to detect fault vibration signal as it changes over time, such as variational mode decomposition, 10 stochastic resonance method, 11 and wavelet analysis. 12 Nevertheless, these methods mostly meet the requirements of the Nyquist–Shannon sampling theory. In this case, a great deal of sampling signals fault diagnosis will be collected to detect fault in the swashplate axial piston pump under different conditions.13–15 Therefore, the big data acquisition will face main problems of storage, transmission, and processing of mechanical vibration signals. In practice, vibration signals of axial piston pump are one of the important information sources for fault diagnosis of the mechanical state.16,17 To minimize the storage and transmission volume, compressive sensing (CS) is an effective method that can simultaneously sense and reduce the dimension of the signal. 18 The literature on CS shows various methods of reconstructing signals from these fewer measurements in medical image 19 and audio equipments. 20 Although several studies have indicated that CS construction is a very effective method for vibration signal, little attention has been paid to its applications in industrial machines. Wang et al. 21 proposed a new improved fast iterative thresholding algorithm (IFISTA) to improve the CS reconstruction effect of vibration signals. Wang et al. 22 established a reconstruction model to detect faults of the diesel engine. Ganesan et al. 23 demonstrated that CS algorithm is used in fault diagnostics for structural components to reduce sampling data and sensors. Shao et al. 24 constructed a new convolutional deep belief network to improve feature learning effectiveness of rolling bearing. Tang et al. 25 proposed a sparse classification algorithm to improve the classification accuracy of rotating machinery faults. A new sparse extraction of impulse by adaptive dictionary (SpaEIAD) algorithm based on CS was presented by Chen et al. 26 for extracting impulse components. Sun et al. 27 argued that the compressed sensing technique is applied for monitoring bearing conditions via wireless sensor network and that it helps to improve the memory and operational capability. A novel multidictionary framework was proposed by Ding et al. 28 for CS system to improve the superior performance.
In generally, most vibration signals present nonsparse features. The nonsparse signals can convert to sparse signals based on transformations, for example, Fourier transform (FT), wavelet transform (WT), 29 and discrete cosine transform (DCT). 30 Then, the signal can be reconstructed by appropriate recovery algorithms that can solve unconstrained optimization problems.31–33 Wang et al. 34 proposed a new sparsity empirical WT method to detect bearing faults. Zhang et al. 35 proposed a new orthogonal matching pursuit (OMP) algorithm to improve the reconstruction accuracy of the bearing signal.
According to the above literature, the purpose of CS is to develop the signal sparsity. Due to low Nyquist sampling rate, the vibration signal is reconstructed perfectly by the nonlinear reconstruction algorithm. The compressed sensing has attracted wide attention from academia and industry. However, application of the traditional CS in fault diagnosis of axial piston pump is lacking. Under the working conditions of heavy load and high rotating speed, the vibration signal of the pump is complex nonsparse in time domain and the correlation between the data is not obvious.36,37 The common transformation methods cannot guarantee a good sparseness of the converted signal, and some data compression methods based on time domain statistics or prediction are not suitable to process this kind of vibration signal.38,39 Therefore, CS reconstruction for mechanical vibration signals is a necessary way to identify the fault types of axial piston pump based on the sparse dictionary model. Furthermore, the traditional sparse dictionary has some shortcomings, such as poor structural properties and great computational complexity, which affect CS reconstruction for vibration signal.
In this paper, adaptive CS algorithm with optimal classification is proposed for bearing signal construction in axial piston pump. First, vibration signals are divided into different blocks and an energy sequence is obtained in accordance with the energy of each signal block. The energy sequence is classified by the quantum particle swarm optimization (QPSO) algorithm to obtain the largest variance of the sequence between. Second, the reconstruction of vibration signals is carried out by using the method of K-SVD dictionary algorithm. Experiments and analyses showed that the proposed method solves the problem that the traditional algorithm could not deal with complex nonsparse signals. It improves the accuracy of the reconstruction signal significantly and enhances the efficiency of the reconstruction process.
Adaptive CS framework
Figure 2 presents the general framework of the proposed adaptive CS method based on optimal classification. The proposed framework mainly involves three processes as follows: (1) vibration signal compression acquisition, (2) adaptive sparse dictionary model, and (3) signal reconstruction.
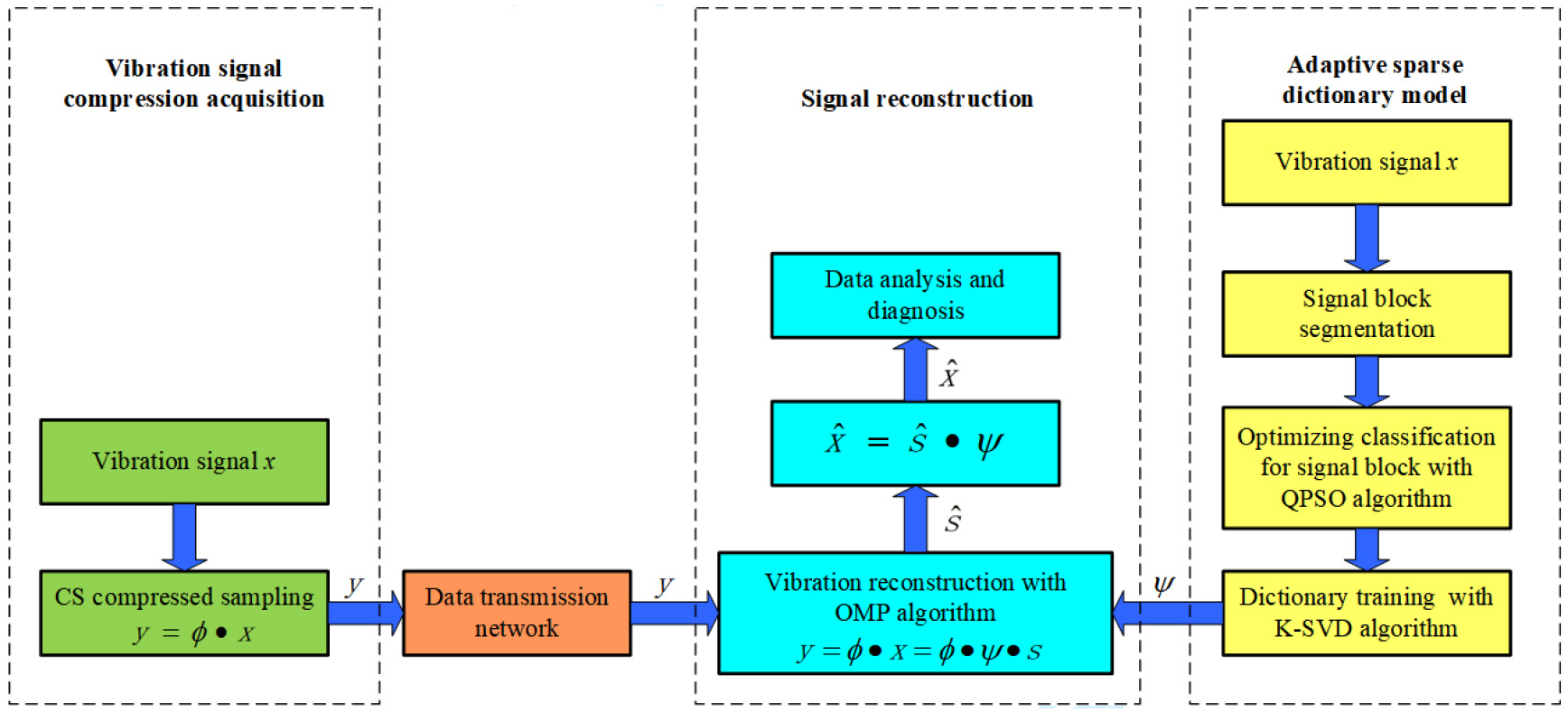
General framework of adaptive compressive sensing method based on optimal classification.
During the vibration data acquisition, the compressed sampling signal y is obtained by downsampling the acquired vibration signal x through measurement matrix ф. We choose the random Gauss measurement matrix as the measurement matrix. Then, the measured value y from the data sampling part is transmitted to the remote monitoring center through a wireless data transmission network. Finally, the process of data measuring mainly completes the reconstruction of vibration signal based on adaptive sparse dictionary Ψ. Before training adaptive dictionary with the K-SVD algorithm, the classification of vibration signal with the QPSO algorithm is used based on energy sequence. In addition, the reconstructed vibration signal
CS theory
The CS theory was proposed to guarantee the accurate reconstruction of the original signal with downsampling, which has received wide attention. According to the CS theoretical framework, the process of signal compression sensing includes three parts as follows: sparse decomposition, compression observation, and signal reconstruction.
Sparse decomposition of mechanical vibration signal is the first step to realize signal compression sensing, and it directly influences the effect of original signal reconstruction. Assuming that the vibration signal is x (x∈R N ), the signal is sparsely decomposed in an orthogonal dictionary. Thus, the vibration signal is depicted as

where x is the original signal, s is the sparse coefficient vector, and Ψ is the adaptive sparse dictionary.
Then, equation (1) can be also written as

where y is the measurement vector and Φ is the matrix of the sparsity basis.
For cases where x can be sparsified through a transform

This is a familiar l0-regularized regression problem, which is known as intractable. One possible approach is to rely on convex relaxation that regularizes the l0-norm of s

Once s is recovered, we can restore x from the reverse sparsification
Design of adaptive sparse dictionary
Signal block segmentation
When the length of the measured signal is too long, it is divided into several signal blocks. The complexity of the measurement matrix construction is reduced to meet the structural requirements of the original signal with the K-SVD algorithm. The signal block can be expressed as

where T is the number of signal block and xi is the ith signal block.
The energy sequence of the signal block is given by


where E is the energy sequence of the signal block, ei is the energy value of the ith signal block, and t is the signal length.
Optimal classification of signal block with the QPSO algorithm
In this paper, the classification process of signal block is optimized by using the QPSO algorithm, which improves the efficiency of signal classification. The QPSO algorithm is an improvement of the particle swarm optimization (PSO) algorithm. By introducing quantum theory, the QPSO algorithm avoids the premature problem of the traditional PSO algorithm. In addition, the optimization efficiency of the QPSO algorithm is high because of the few operators and simple calculations in the QPSO algorithm. Thus, the QPSO algorithm is depicted as follows



where M is the population size, μ is the random number, mbest is the mean point at the best position of each particle, a is the compression expansion factor, Pj and Pg are the best positions of particle number j and g, respectively, under iterative computation conditions of individual and global optimization, and n is the iteration number.
In this simulation, the number of signal classification is set to n and the number of position parameter is optimized as n – 1. The energy sequence is divided into the number of blocks (n) by the number of position parameters (n − 1). Therefore, the single particle in QPSO is expressed as Pi(H1, H2, …, Hn − 1). Hi represents the classification position between the i − 1th signal block and the ith signal block. The optimization objective function of the QPSO algorithm is the variance of energy mean between different kinds of signals so as to ensure the discrimination between different kinds of signal blocks. Thus, the objective function is given by



where q is the variance and
Dictionary training with the K-SVD algorithm
Dictionary learning is essential for sparse coding. Like sparse coding, the K-SVD algorithm is applied for dictionary learning. The main idea of the K-SVD algorithm is to find the random dictionary and yield sparse representations for the training signals. In this study, the high sparseness representation of the same type of signal is based on an optimized dictionary which combines the characteristics of the signal itself. The objectives of the K-SVD algorithm are as follows

where ε0 is the sparse coefficient vector.
In the second stage, we update the dictionary column by column and train the dictionary iteratively. We assume that
If the dictionary is updated, equation (14) can be rewritten as
where
In the process of the K-SVD training algorithm, dictionary atoms are trained one by one, because si usually contains zero elements. It is necessary to deal with zero-removal shrinkage in order to ensure sparsity. Thus


where

The dictionary obtained by this method has strong adaptability, and the signal block can obtain a good sparse decomposition effect. In the process of compressed sensing reconstruction, compressed sensing factor is constructed by dictionary and measurement matrix, which improve the reconstruction effect of the vibration signal.
General procedure of the proposed method
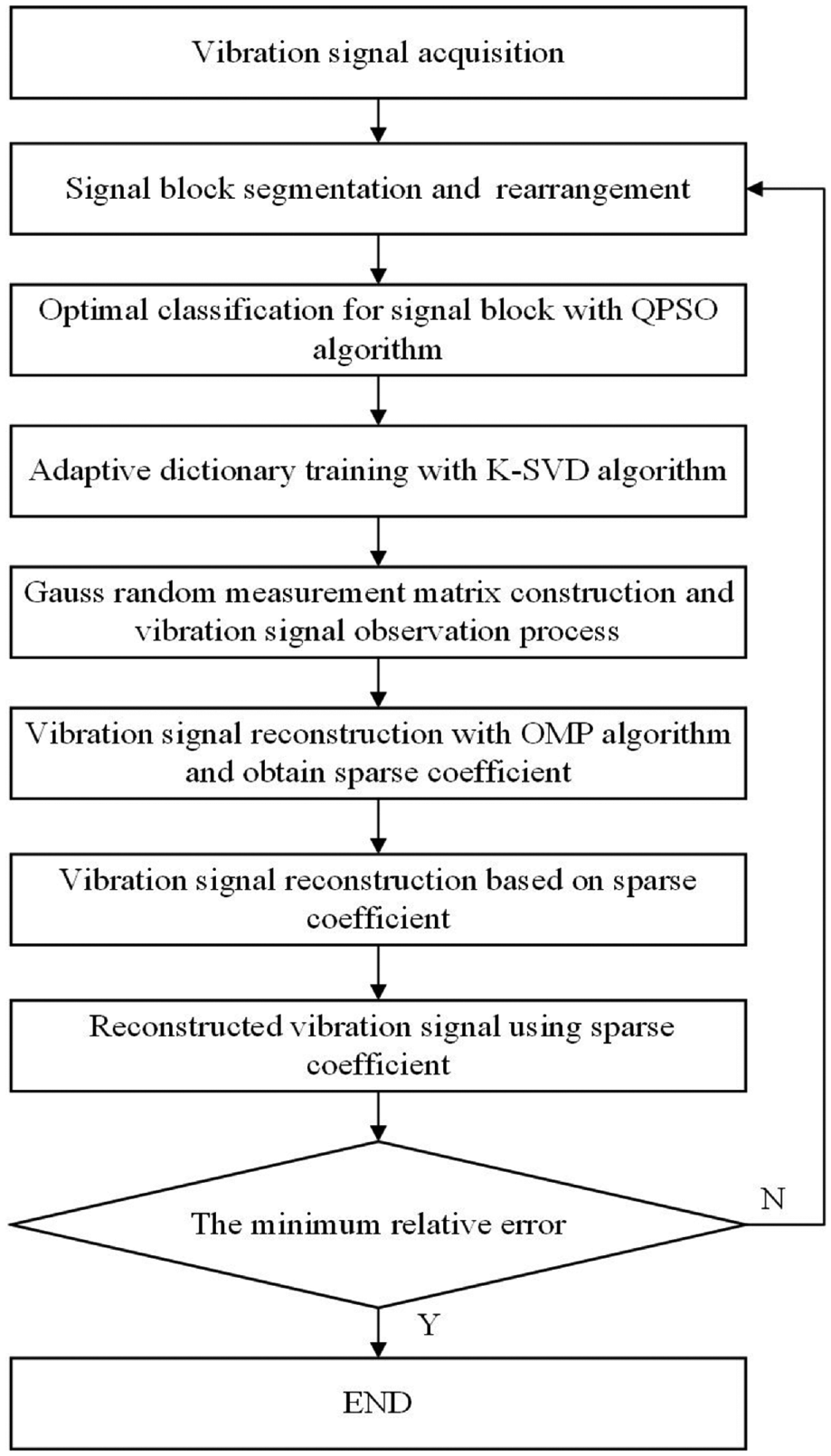
In this study, sparse dictionary design is the main step in the vibration signal compression sensing process. Figure 3 presents the diagram of the signal compressed sensing algorithm. In the process of sparse dictionary design, OMP is the greedy iterative algorithm that works well for sparse data modeling. The general procedure is summarized as follows:
Step 1: The vibration signal is divided into several signal blocks, and then the energy sequence of the signal block construction (e) is obtained.
Step 2: According to the magnitude of the energy block, the rearranged energy sequence (e′) is obtained.
Step 3: The signal classification process is realized by the QPSO algorithm.
Step 4: Sparse dictionary of different signal blocks training using the K-SVD algorithm.
Step 5: The one-dimensional measurement value y is obtained by projecting the one-dimensional vibration signal based on Gauss random matrix and input signal.
Step 6: The measured value y is transmitted to the remote monitoring center through the data transmission network, and then the vibration signal is processed with the OMP algorithm based on related parameters, such as the measured value y, the measurement matrix, adaptive dictionary, and reconstruction coefficient.
Step 7: Reconstruction of vibration signal using sparse coefficient.
Step 8: Judge whether the relative error is the minimum value. When the relative error is less than the certain value, the procedure is complete. Otherwise, the proposed algorithm returns to Step 2.
Adaptive compressive sensing algorithm.
Experimental verification
Signal acquisition
The study of compressed sensing reconstruction for axial piston pump bearing vibration signal is carried out using a testing rig as shown in Figure 4. The test rig consists of an LC-AD-DN20 flow meter, a DBW20B-1-50 relief valve, an HDA4445 pressure transducer, a ZJ-500A rotating speed transducer, a QABP-225M4A-45KW electric motor, AKE398 acceleration transducers, a tested axial piston pump, and a laptop. During the vibration tests, four sets of fault bearing are used: a healthy bearing and three bearings with three different damage profiles. The motor operating speed was set at 1000 r/min, and vibration signals were obtained using a set of accelerometers mounted on bearing housings. The vibration data were sampled at 48,000 Hz, which is approximately 2880 samples per revolution.
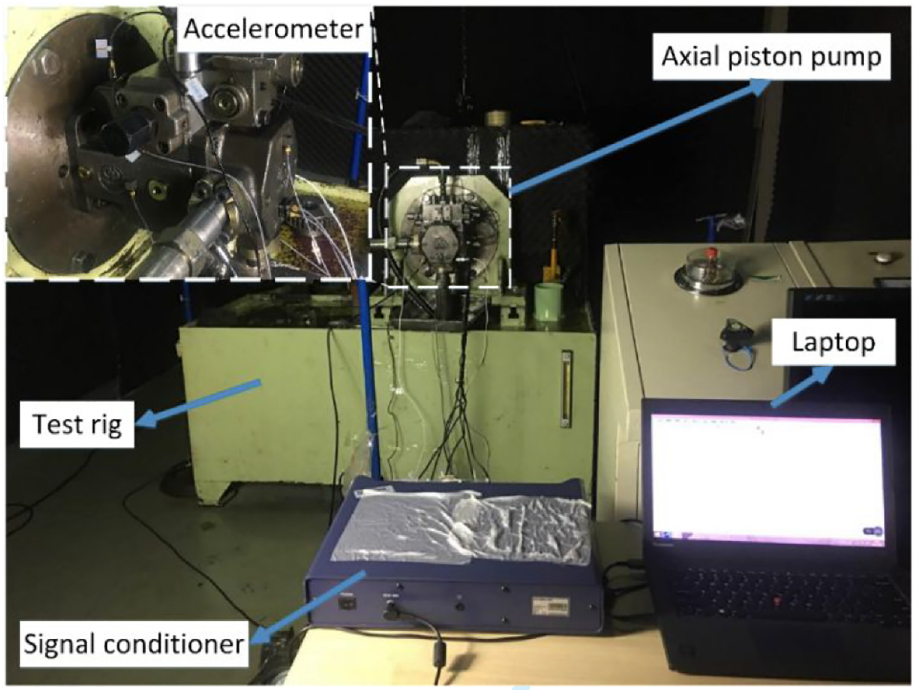
Photograph of the axial piston pump test rig.
The rolling bearings with three different damages are used in the experiment shown in Figure 5. The structural parameters of the bearings are described as follows: (a) bearing inner diameter is 35 mm; (b) bearing outer diameter is 62 mm; (c) bearing length is 20 mm; (d) ball diameter is 8.56 mm; and (e) pitch diameter is 48.5 mm
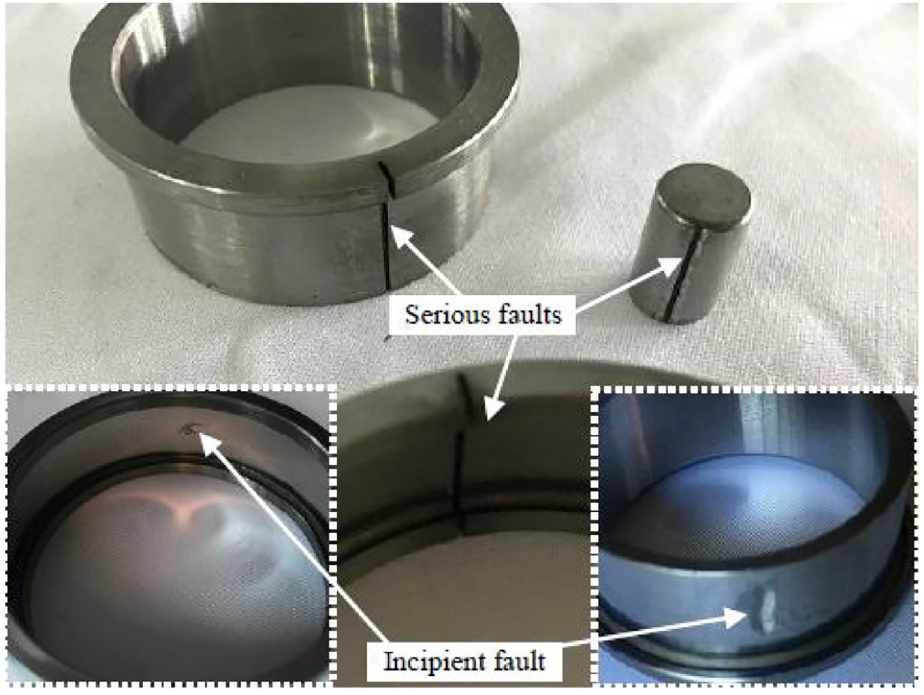
Photograph of the damaged rolling bearing.
Figure 6 presents experimental vibration signals of fault bearing. For all cases, it is observed that the amplitude in time domain shows impulse components. Compared with undamaged case, only the increases in the amplitude spectra are noticeable for damaged cases. Although the change in amplitude spectra verifies the presence of the damage, it still cannot identify which bearing is more severe.
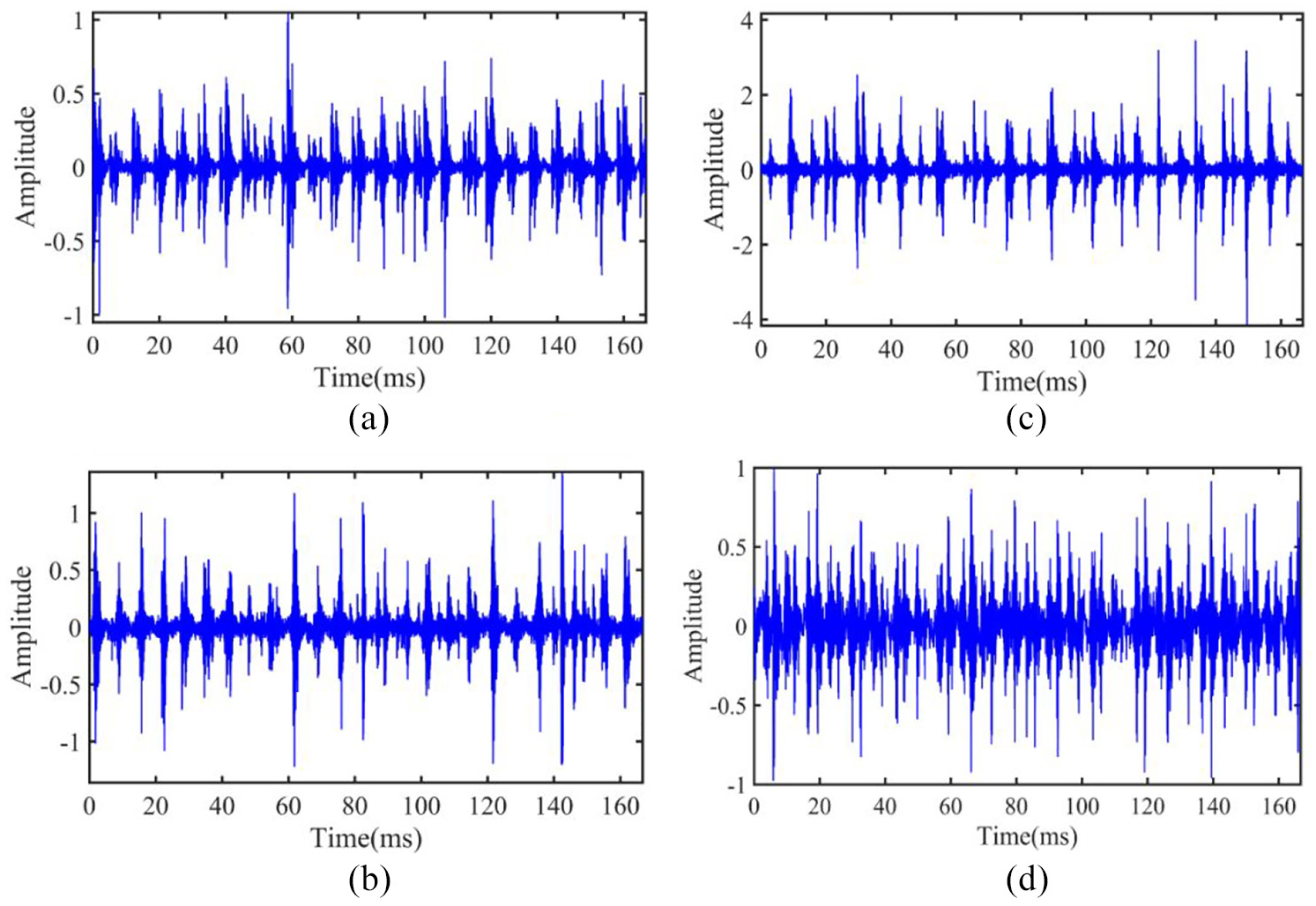
Experimental vibration signals of fault bearing: (a) outer race damage, (b) inner race damage, (c) rolling element damage, and (d) normal condition.
Comparison of the proposed method with some traditional methods
To evaluate the data compression method, two critical issues need to be considered: the compression volume and the distortion measurement of the reconstruction signal. Usually, the compression ratio is an important index to measure compression volume. Thus, the compression ratio is depicted as

where CR is compression ratio, t0 is the original signal length, and tc is the compressed signal length.
The peak signal-to-noise ratio (PSNR) is one of the most popular signal reconstruction methods that measures the similarity between reconstruction and original signals. Thus, the PSNR is depicted as
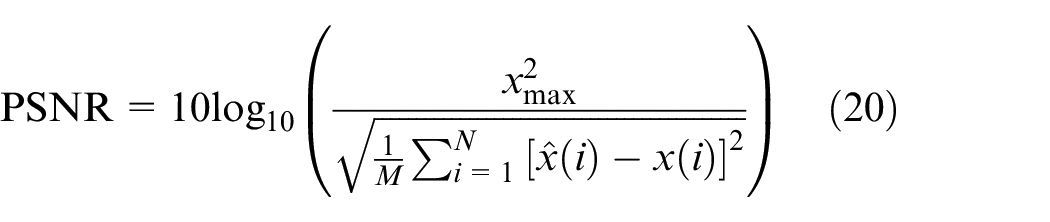
where xmax is the maximum value and M is the sampling number.
To verify the compressed sensing effect of vibration signal with the proposed algorithm, the length of signal segmentation (L) is determined, and then the number of signal block is set to 8000/L. The smaller the length of signal segmentation, the larger the number of signal blocks, resulting in a higher computation time.
Figure 7 shows the effect of signal length on computation time of the proposed algorithm for rolling bearing with four fault states. For the rolling bearing with four different fault states, the computation time of the proposed algorithm decreases with increasing the signal length and then tends to be stable. When the length of signal segmentation is set to 16, the time consumption shows a minimum value. This result can be explained by the fact that the complexity of measurement matrix will increase the consumption time in the compression and reconstruction of a single signal block. Therefore, when the length of signal segmentation is set to 16, the computation efficiency for the proposed algorithm is the highest.
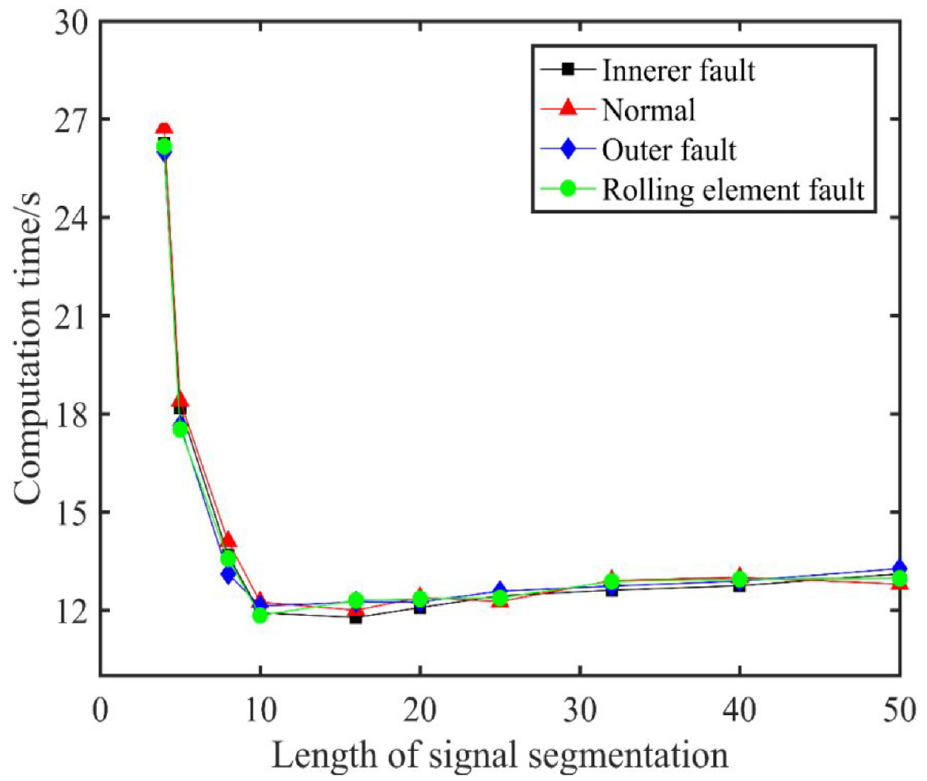
Effect of signal length on computation time of the proposed algorithm for rolling bearing with four fault states.
Figure 8 presents the energy sequences of vibration signal blocks for different fault bearings. For fault bearing with four fault states, when the number of signal blocks is set to 500, the rearranged energy sequence is obtained according to the magnitude of the energy block.
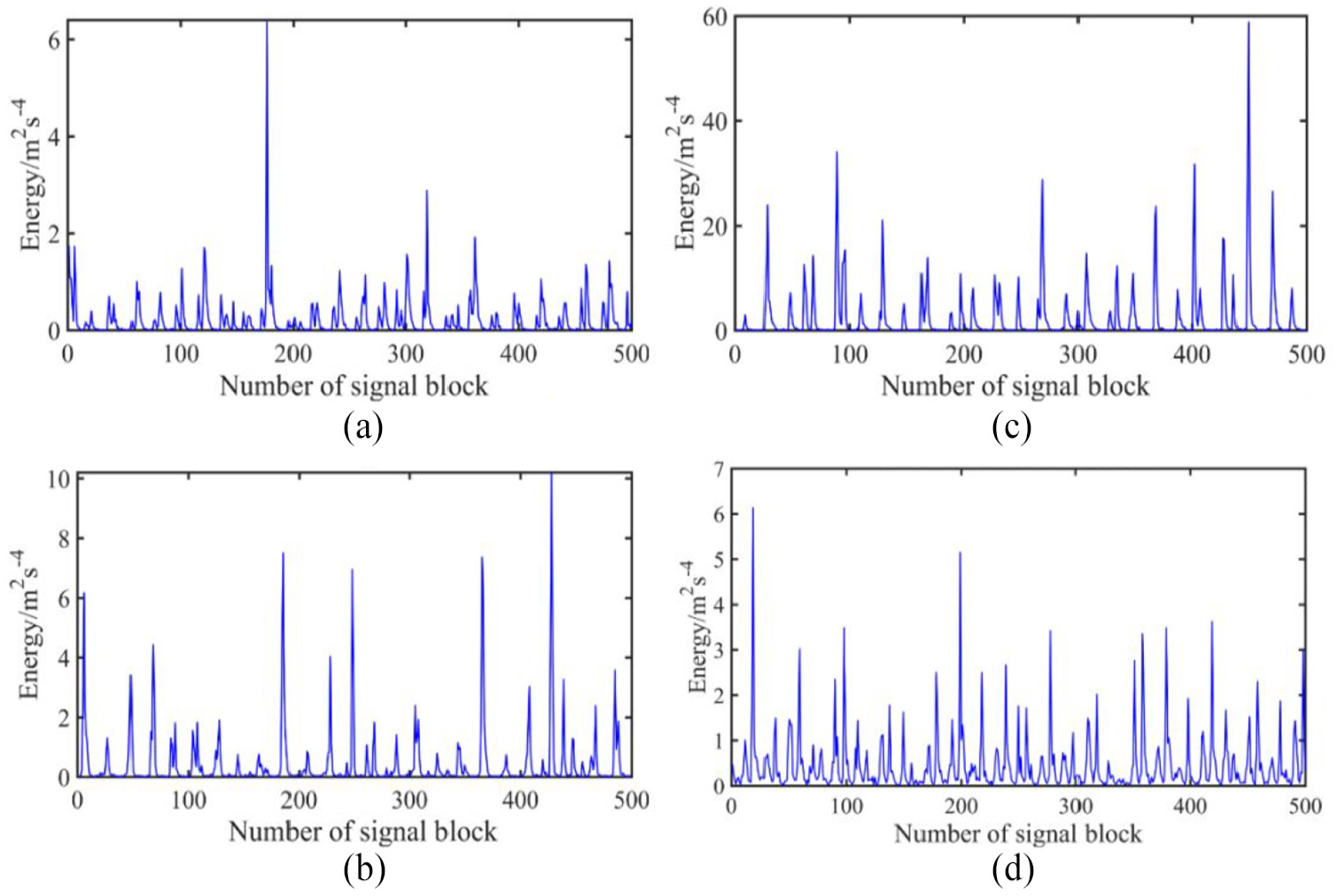
Energy sequences of vibration signal blocks for fault bearing: (a) outer race damage, (b) inner race damage, (c) rolling element damage, and (d) normal condition.
The QPSO algorithm is used to classify different kinds of signal blocks based on the energy sequence. In the QPSO algorithm, the size of the particle population is set to 100. The optimal adaptive value of each iteration in the PSO computation process is shown in Figure 9. With the increase in iteration time, the adaptive value shows an upward trend. When the number of iterations is more than 20, the optimal adaptive value does not converge and changes slowly. If the number of iterations is more than 30, the optimal adaptive values for the four different conditions almost do not change significantly. To guarantee the classification effect for different kinds of signal blocks, the number of iterations is set to 30 and finally results in a high classification efficiency and computation time reduction.
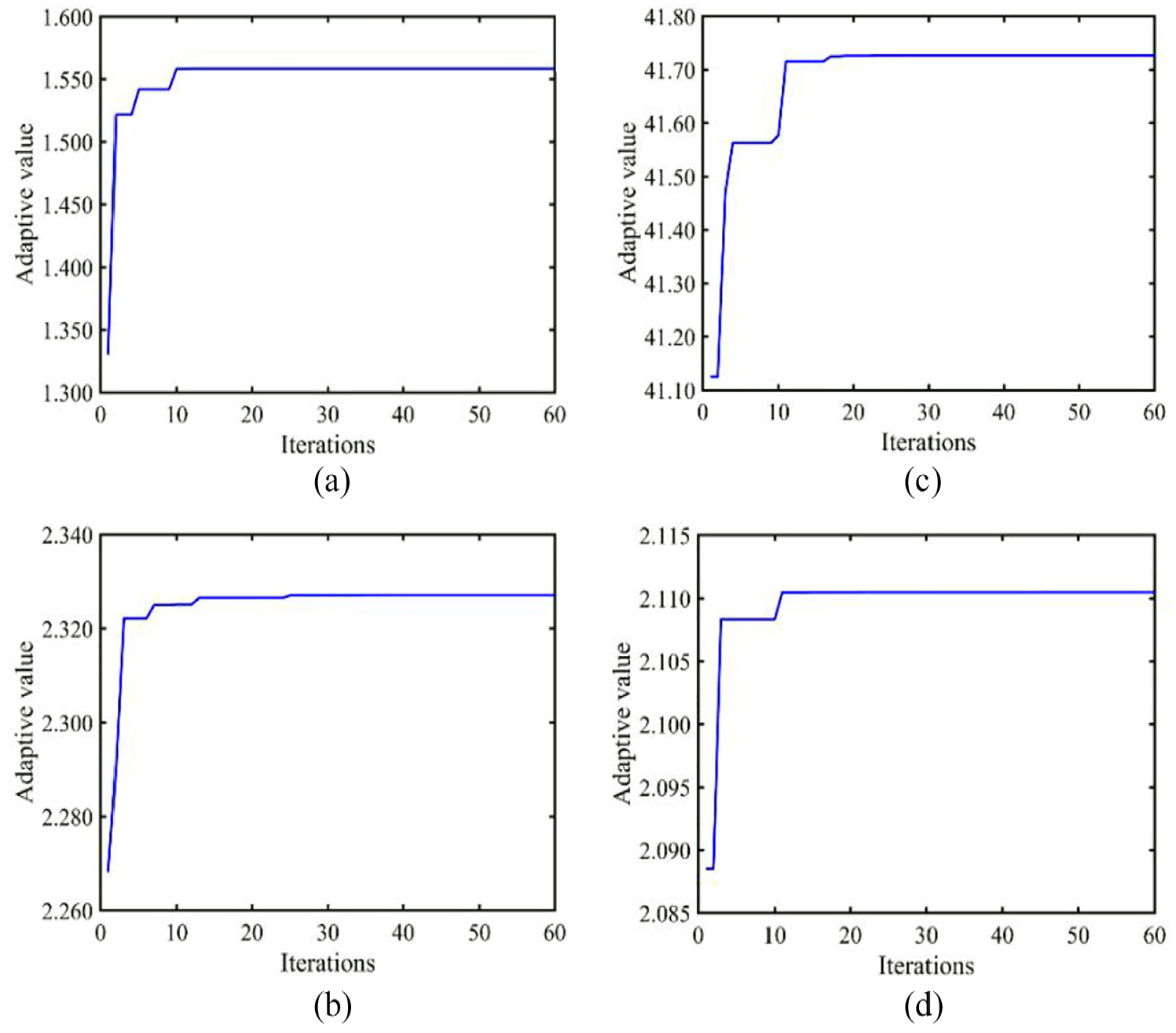
Convergence effect of iteration for fault bearing signal classification: (a) outer race damage, (b) inner race damage, (c) rolling element damage, and (d) normal condition.
Combining Figures 6, 8, and 9, it can be found that the classification effect of the QPSO algorithm is closely related to the amplitude and energy of signal block in the time domain. The amplitude of energy sequence in the signal block becomes larger by increasing the amplitude of the sampling signal, resulting in a higher adaptive value of each iteration in the PSO computation process. When the bearing is in normal condition, mechanical equipment is easily affected by the noise signal. The structural characteristics and sparsity of mechanical vibration signals are poor. The regularity of energy sequence of vibration signals is poor after signal segmentation. If the bearing runs in the fault state, the fault signal shows different structural characteristics. The fault signal is mixed with normal signal and noise signal and becomes more complex in time domain, and then the structural characteristics and sparsity of fault signal are worse. If the fault signal is strong, the signal in time domain shows a high amplitude, and then the energy sequence shows a strong regularity after signal segmentation. In this case, the structural characteristics and sparsity of fault signal are improved by the proposed algorithm, which is useful to reduce background noise.
Figure 10 shows the effect of signal classification number on the PSNR index of signal block for rolling bearing with four fault states. In the process of dictionary training, due to large data sets of signal block, the small samples cannot guarantee the quality of sparse dictionary. For different kinds of signal block, the optimal values of classification number for the four fault states are 8, 10, 4, and 5, respectively. When the classification number of signal block is set to 10, the PSNR value from the rolling bearing with inner race damage shows a minimum value. Compared with rolling bearing with other fault states, the PSNR value from rolling bearing with inner race damage is lower, about 2.9–10.7, than the PSNR value from other fault bearings. The results implied that the lowest signal-to-noise ratio has a positive effect on the compressed sensing reconstruction of vibration signal.
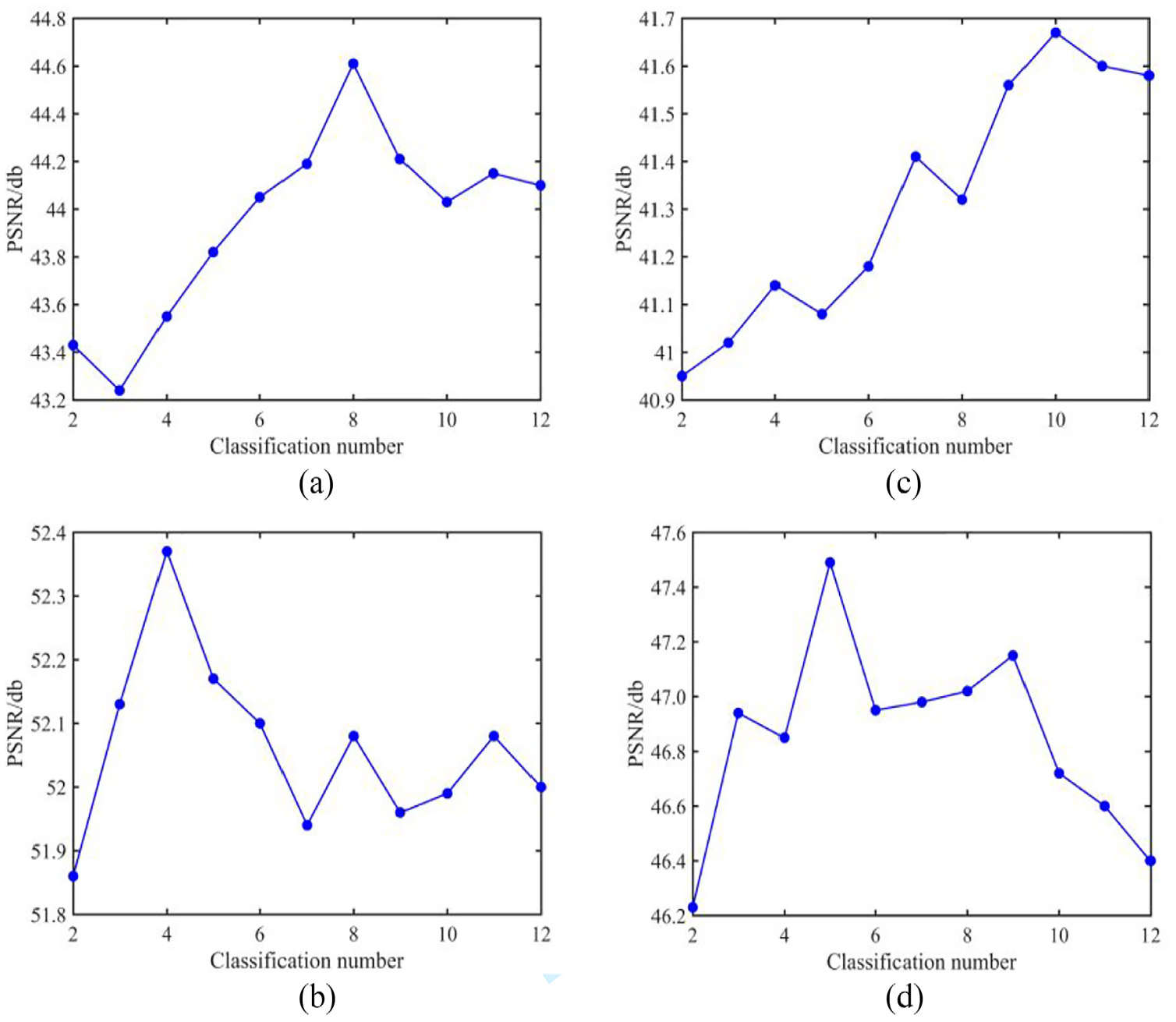
Effect of classification number of signal block on the PSNR index of signal block for rolling bearing with four fault states: (a) outer race damage, (b) inner race damage, (c) rolling element damage, and (d) normal condition.
Table 1 shows the compressed sensing effect of vibration signal under different classification methods. Note that △PSNR is defined as the PSNR of vibration signal difference between the proposed algorithm and other classification methods. From Table 1, the PSNR of vibration signal based on the proposed algorithm is the highest, which is better than that of other classification methods. The results can also illustrate the effectiveness of the compressed sensing algorithm based on the optimized classification. It can be deduced that the proposed algorithm can improve the compressed sensing reconstruction effect of signal with poor structural characteristics.
Compressed sensing effect of vibration signal under different classification methods.
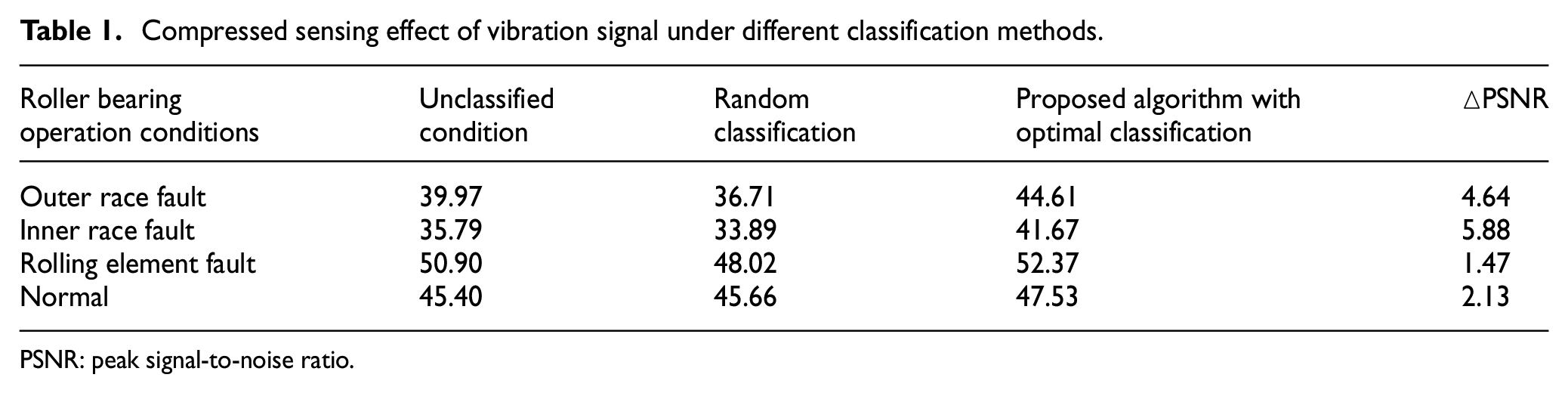
PSNR: peak signal-to-noise ratio.
Although the proposed algorithm improves the reconstructed compressed sensing ratio for signal block, it reduces the computation efficiency. Under the same hardware conditions, the complexity of the algorithm is evaluated by calculating he computation time. Therefore, the variable rate of PSNR and computation time are given by


where λ is the variable rate of PSNR, △PSNRc is the difference value of PSNR from classified signal block, △PSNRu is the difference value of PSNR from unclassified signal block, γ is the variable rate of computation time, △tc is the computation time for classified signal, and △tu is the computation time for unclassified signal.
Figure 11 presents the effect of signal length on the PSNR and computation time. With the increase in signal length, the fluctuation range for the PSNR is small, and the average value is 15.2%. The computation time ratio decreases continuously with the increase in signal length until it is reduced to reach 8%. However, the relative change rate of computation time decreases with the increase in the signal length. Therefore, if the length of original signal is very long, the proposed algorithm can greatly improve the effect of compressed sensing algorithm at the expense of a small amount of computational efficiency.
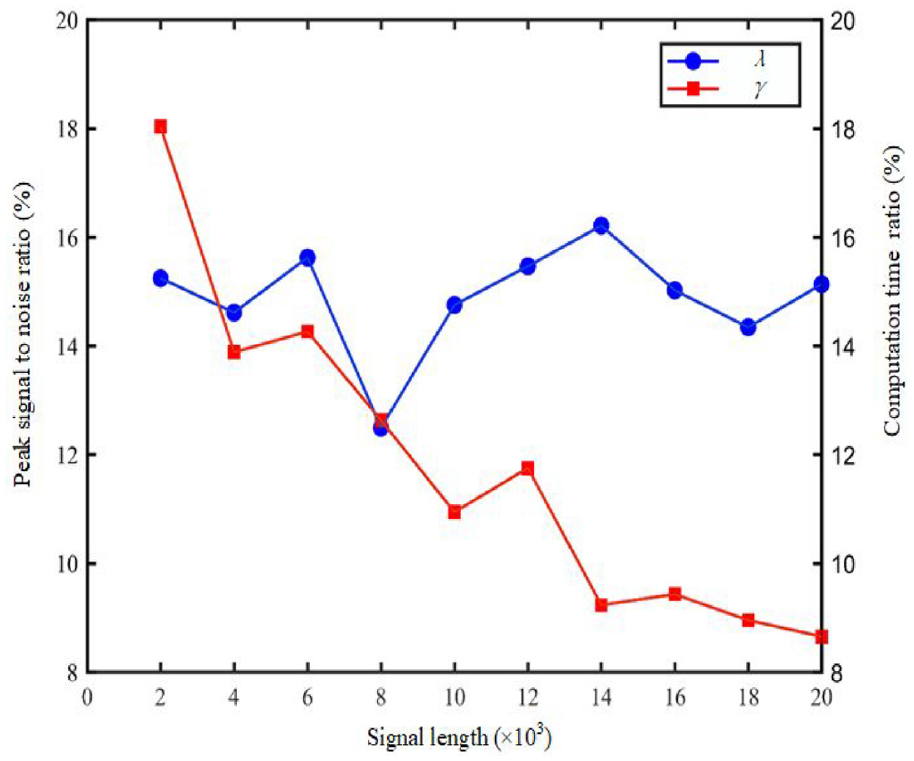
Effect of signal length on the peak signal-to-noise ratio and computation time.
In this study, the three different algorithms are used to analyze the compressed sensing effect of reconstructed signal, including wavelet basis algorithm, the K-SVD algorithm, and the proposed algorithm. The PSNR index of reconstructed signal with different algorithms is shown in Table 2. Note that △PSNR1 and △PSNR2 are different values between the PSNR values of reconstruction signals with different algorithms. Thus, the formulas are


Comparison of PSNR index of reconstructed signal based on different algorithms.
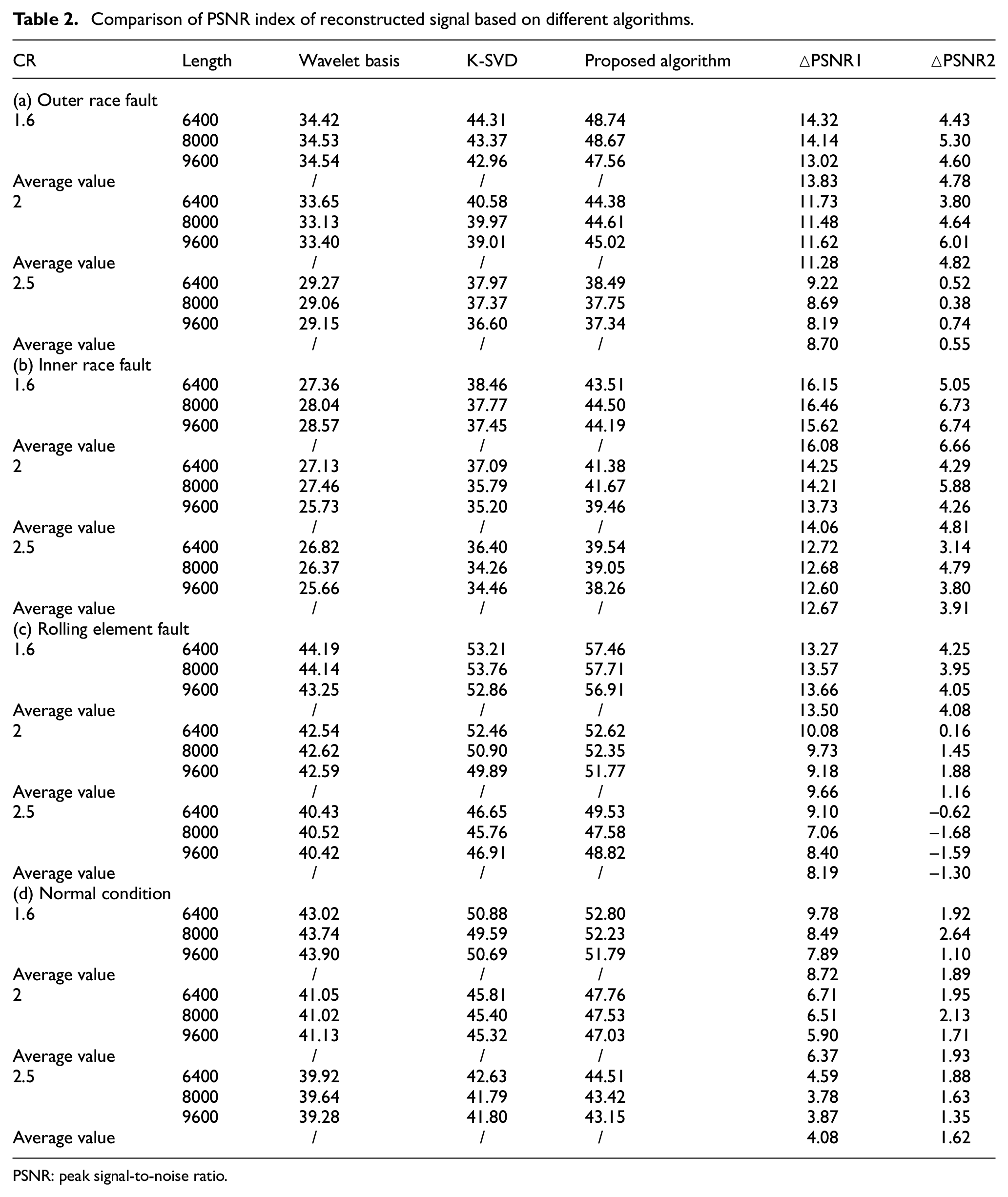
PSNR: peak signal-to-noise ratio.
where △PSNR1 is the difference value between the PSNR of vibration signals with the proposed algorithm and wavelet basis algorithm, △PSNR2 is the difference value between the PSNR of vibration signals with the proposed algorithm and the K-SVD algorithm, PSNR is the PSNR of vibration signal with the proposed algorithm, PSNRW is the PSNR of vibration signal with wavelet basis algorithm, and PSNRk is the PSNR of vibration signal with the K-SVD algorithm.
For the same compression ratio of vibration signal, the signal length has little effect on the compressed sensing reconstruction. When the signal length is the same, the compressed sensing reconstruction effect decreases by increasing the compression ratio. The structural characteristics of the signal have a great influence on the compressed sensing reconstruction effect. For weak fault signals (rolling element damage and outer ring damage), as shown in Table 2(a) and (c), the signal reconstruction effect is poor under different compression ratios. For strong fault signals (inner ring fault) or the normal signal, as shown in Table 2(b) and (d), the signal reconstruction effect is obvious and the conclusion is consistent with the previous research. It can also be found that the PSNR index of reconstructed signal for rolling bearing with four fault states obtained by the proposed algorithm is significantly higher than that of the wavelet basis algorithm. Especially, for a strong fault signal, if the compression ratio of vibration signal is low, the PSNR value of reconstructed signal is obvious. For rolling element failure signal with a compression ratio of 1.6, as shown in Table 2(c), the PSNR index of the reconstructed signal obtained by the proposed algorithm is higher, about 6.67 dB, than that of the K-SVD algorithm without signal classification function. In summary, for vibration signal with low compression ratio, the compression reconstruction effect obtained by the proposed algorithm is more obvious.
In this study, the relative error and Pearson correlation coefficient are used to evaluate the reconstruction performance and waveform similarity of vibration signals. Therefore, the calculation formula of relative reconstruction error is written as

where σ is relative reconstruction error.
The Pearson correlation coefficient is defined as
where r is the Pearson correlation coefficient.
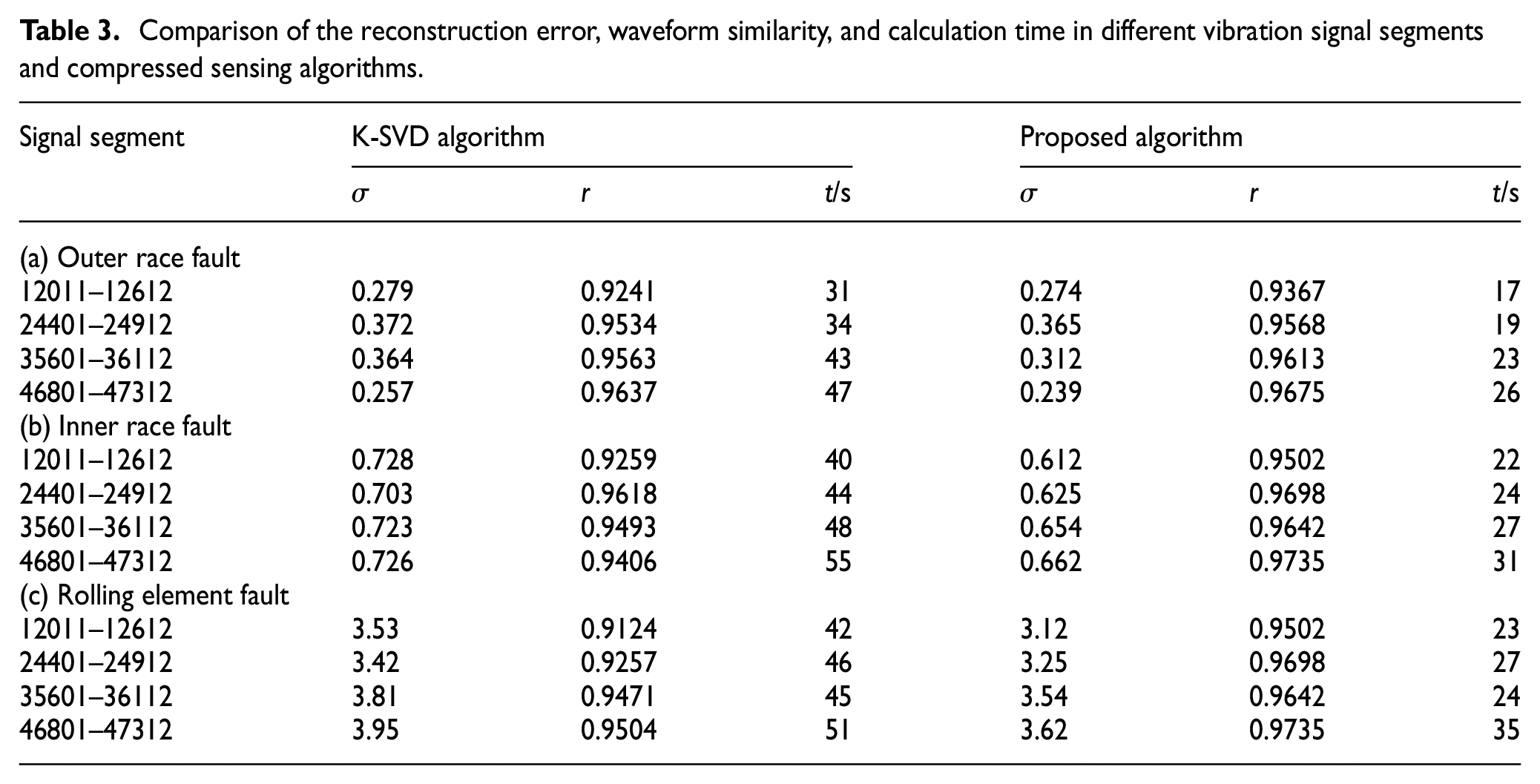
Table 3 shows a comparison of the relative reconstruction error, waveform similarity, and calculation time for vibration signal segments by using different algorithms. In this case, the CR is set to 1.6, and then the compressed sensing reconstruction performances of vibration signal under different algorithms are discussed. For different bearing fault signals, the relative reconstruction error of the outer race fault signal is lowest, and the relative reconstruction error of the inner race fault signal is highest. Especially, if CR is set to 1.6, the average relative reconstruction error of the vibration signal obtained by the proposed adaptive compressed sensing algorithm is 4.25%. For different bearing fault signals, the Pearson correlation coefficient of vibration signal obtained by the proposed algorithm is higher than that of the K-SVD algorithm without signal classification function. This result also fully demonstrates that the waveform of reconstructed signal is very similar to the waveform of original signal. To ensure high reconstruction accuracy, the classification number of signal blocks is optimized before a new sparse dictionary is used to train the vibration signal by the proposed algorithm. The reconstruction time of the proposed algorithm is shorter than that of the K-SVD algorithm without signal classification function. The main reason can be that the adaptive sparse dictionary model reduces the training time of samples. Therefore, this result also verifies the effectiveness of the adaptive sparse dictionary model with optimized classification of signal block. Therefore, the reconstruction accuracy is further improved and the reconstruction time is shortened by nearly 43.6%.
Comparison of the reconstruction error, waveform similarity, and calculation time in different vibration signal segments and compressed sensing algorithms.
Conclusion
To improve the reconstruction effect of vibration signal, a new method of compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model is proposed in this study. First, vibration signals are divided into blocks, and an energy sequence was produced in accordance with the energy of each signal block. Second, the energy sequence of each signal block was classified by the QPSO algorithm. Finally, the reconstruction of machinery vibration signals was constructed using the method of K-SVD dictionary-training algorithm. Compared with some traditional methods, the effectiveness of the adaptive compressed sensing algorithm is validated. The experimental results show that the relative reconstruction error of vibration signal with the proposed algorithm is 4.25% and reconstruction time decreases by 43.6% when the compression ratio is 1.6.
Research Data
original_data-Inner_race_damage – Supplemental material for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model
Supplemental material, original_data-Inner_race_damage for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model by Xiao Chaoang, Tang Hesheng and Ren Yan in Measurement and Control
Research Data
original_data-Normal_condition – Supplemental material for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model
Supplemental material, original_data-Normal_condition for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model by Xiao Chaoang, Tang Hesheng and Ren Yan in Measurement and Control
Research Data
original_data-Rolling_element_damage – Supplemental material for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model
Supplemental material, original_data-Rolling_element_damage for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model by Xiao Chaoang, Tang Hesheng and Ren Yan in Measurement and Control
Research Data
original__data-Outer_race_damage – Supplemental material for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model
Supplemental material, original__data-Outer_race_damage for Compressed sensing reconstruction for axial piston pump bearing vibration signals based on adaptive sparse dictionary model by Xiao Chaoang, Tang Hesheng and Ren Yan in Measurement and Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos. 51805376 and 51505338), Zhejiang Provincial Natural Science Foundation of China (No. LQ17E050003), Open Foundation of the State Key Laboratory of Fluid Power and Mechatronic Systems (GZKF-201719), and Basic Scientific Research Projects Foundation of Wen Zhou (G20180019).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.