
Abstract
Given the complex characteristics of permanent magnet linear synchronous motors and the external interference encountered during their operation, controlled precision and efficiency are necessary. In this paper, the mechanism of biological endocrine hormone regulation is analyzed, and an intelligent controller based on the obtained neuroendocrine algorithm is implemented in the control system of a permanent magnet linear synchronous motor. The controller mainly includes a hypothalamic regulation module, a single-neuron proportion integration differential module, and an ultrashort feedback module. It is designed and referenced to the long feedback, short feedback, and ultrashort feedback loop mechanisms of neuroendocrine hormone regulation and abides by the principle of human neuroendocrine hormone regulation. The antagonistic hormone regulation module achieves rapid and stable elimination of errors through the fusion of enhanced regulation with regulation inhibition, and the single-neuron proportion integration differential module enhances the adaptive and self-learning capabilities of the control system. The proposed control is successfully used in a permanent magnet linear synchronous motor, and the experimental results show that the controller presents many advantages, such as fast dynamic responses, strong online adjustment ability, and good running stability in the control system, all of which improve the robustness of the control system.
Introduction
A linear motor is a kind of electric power transmission device that converts electric energy into linear motion mechanical energy directly. Compared with the traditional rotary motor, the linear motor eliminates numerous intermediate transmission mechanisms and overcomes many shortcomings of the rotary motor. Permanent magnet linear synchronous motors (PMLSMs) have been widely used in precision servo systems, transportation, and other fields due to their remarkable characteristics, which include direct linear feed motion and excellent performance in acceleration, accuracy, and other applications.1–3 With the development of linear motor applications, the corresponding servo control is no longer limited to the traditional proportion integration differential (PID) control,4–7 especially in the high-precision servo control system research. Given the complexity of the mathematical model of the linear motor, the problems of thrust fluctuation and variable parameters encountered during linear motor control, many researchers have sought to study modern control, intelligent control, and other linear motor control strategies. Because a PMLSM is a typical multivariate, nonlinear system with strong coupling, the stability and accuracy of the control system may be reduced due to various factors during the control process. Therefore, the traditional PID control cannot perfectly meet the demands of the control system. At present, many intelligent control methods have been reported,8,9 such as fuzzy PID control, single-neuron PID control, PID control based on genetic algorithm, and so on. These control strategies utilize various advantages and have achieved certain control effects, but some defects have also been noted. Among the above methods, iterative learning algorithm control presents certain deficiencies in nonreversible motion control. The control parameters of fuzzy PID control algorithm must be decided by prior experience that will be interference by strong subjectivity. Single-neuron PID control has the problem of slow learning speed and long response time. And PID control based on genetic algorithm requires the establishment of precise model of the control object, which is hard to achieve in practical engineering applications.10–12
Bio-intelligent control is a starter intelligent control strategy that was developed fairly recently. Its theoretical basis is the operating mechanism of human physiological systems, such as the nervous system, endocrine system, immune system, and genetic mechanism.13,14 At present, many studies based on bio-intelligence control focus on the nervous system, such as artificial neural network technology. This paper proposes an intelligent control algorithm based on bio-intelligent control theory and the human neuroendocrine system that can be applied to PMLSM control systems. The algorithm obtains the antagonistic hormone regulation mechanism by analyzing the operating mechanism of the human endocrine system and is combined with a single-neuron PID control in the artificial neural network field. According to the experimental results, the proposed algorithm improves the accuracy and robustness of the linear motor control system compared with that obtained with ordinary PID control.
PMLSM mathematical model
A PMLSM has thrust fluctuations because of its structural and principle characteristics. The main factors causing thrust fluctuations include cogging and end effects caused by core slots, the viscous friction caused by the motion of the mover, and sliding friction disturbances.15–17 Vector control is an effective control method for linear motors, usually including the following control methods: rotor flux orientation control, stator flux linkage control, maximum thrust current ratio control, field weakening control,



where
Thrust fluctuations and frictional disturbances can be established by the following model


where
The interactions of the magnetic field of the AC motor are complex; thus, the component coupling cannot be directly controlled, and combining the vector control method with coordinate transformation is necessary. Without considering factors, such as core eddy current, hysteresis, and end effects, the vector control model is established. The mathematical model of the PMLSM in the

where p is the differential operator and R is the resistance of each phase winding;
The thrust equation of motor movement is

And, the motion equation of motor is

where
Human hormone regulation mechanism
Principles of neuroendocrine hormone regulation
Advanced regulation of the human brain and central nervous systems imposes cooperation between the nervous and endocrine systems. The hypothalamic tissue and some neuroendocrine cells are the link and bridge used to maintain the stability of the human physiological state. The principle of the neuroendocrine hormone regulation involves stimulation of the central nervous system to act on the hypothalamus and trigger the regulation of the endocrine system under the stimuli of external or internal changes. During regulation, the hypothalamus produces both a specific pituitary-releasing hormone to the pituitary gland and a corresponding prohormone. In turn, hormones are diffused to target glands through the blood and other internal environmental channels to secrete target glandular hormones that, eventually, affect certain organs or tissues of the human body. Regulation of environmental homeostasis in the human body is then completed. 18
Antagonistic hormone regulation
The endocrine system includes a wide variety of hormones and functions, and synergistic effects, such as promotion and inhibition, occur among the related molecules. Taking the regulation of human blood glucose concentration by hormones as an example, glands in the endocrine system are capable of secreting hormones, such as insulin and glucagon. This antagonistic hormone regulatory effect is shown in Figure 1. Insulin is the only hormone in the body that can reduce the concentration of the system, accelerate the metabolic process, and promote the syntheses of glycogen, fat, and protein. Glucagon promotes the decomposition of glycogen in the liver and the production, as well as output, of glucose; thus, it works together with epinephrine, growth hormone, and other hormones to increase the blood glucose concentration. In addition, insulin stimulates the secretion of glucagon by reducing systemic concentrations, while glucagon promotes its production. This interaction shows that insulin and glucagon, as a group of hormones with an antagonistic relationship, through the promotion of blood glucose concentration and inhibition, cooperatively maintain the relative balance and stability of the blood glucose concentration in the human body within a certain period of time.
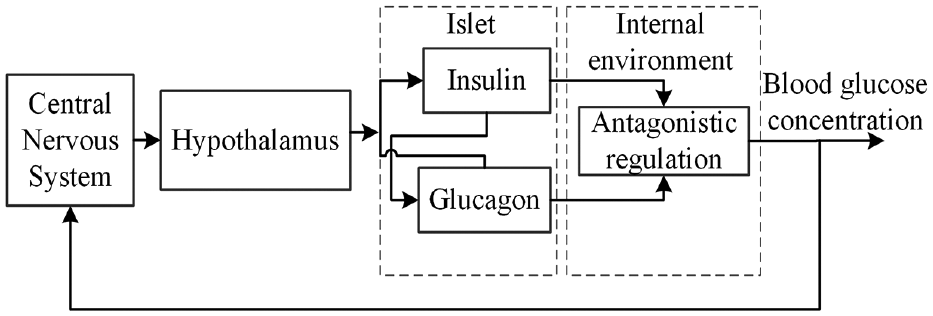
Antagonistic hormone regulation.
Neuroendocrine intelligent controller
Structure of the controller
The artificial nerve endocrine (ANE) system originates from the cross-biological information processing network between the human nervous system and the endocrine system and demonstrates very high research value in the field of intelligent control. Based on the analysis of hormonal antagonism in the neuroendocrine system, a neuroendocrine intelligent controller and control algorithm can be designed in the framework of the ANE. The structure of the controller is shown in Figure 2. An enhanced regulation module is set according to the role of insulin in blood glucose regulation, and an inhibition adjustment module is set according to the regulation effect of glucagon. The two modules quickly eliminate and stabilize the system deviation, while the antagonistic control module synergizes and integrates enhanced regulation and regulation inhibition. To further improve the performance of the controller, a compound control mode is adopted, and a single-neuron PID control unit, as well as an ultrashort feedback unit, is introduced; these components ensure that the controller can better adapt to complex control objects, such as linear motor parameters and the operating environment.
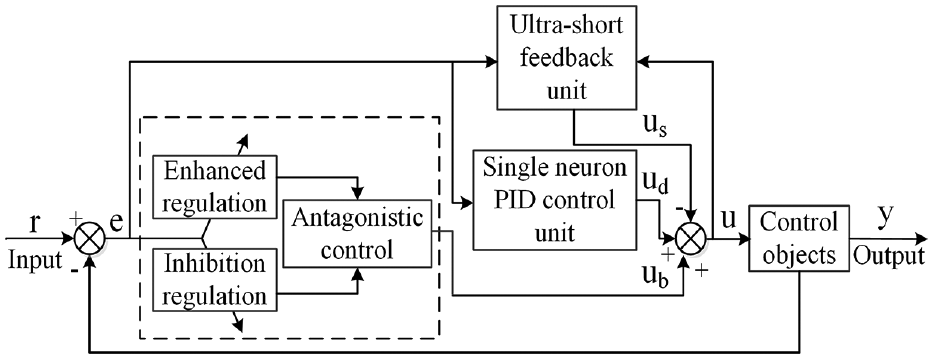
Structure of a neuroendocrine controller.
In the controller as shown in Figure 2, r is the target input of the system; y is the actual output of the system, and e is the dynamic control deviation of the system.
Control algorithm of the antagonistic regulation unit
Enhanced adjustment algorithm
The enhanced conditioning unit corresponds to the positive regulation of insulin of human blood glucose concentrations. The design of the control algorithm follows the regulation of hormones and is carried out under the overall framework of antagonistic regulation. The control algorithm utilizes the system control deviation

where
Based on the Hill ascending segment function of the hormone regulation law, the coefficient value n is taken as 1, and the rate of change of hormone-enhancing regulatory factors

where
Suppression adjustment algorithm
The inhibition regulating unit corresponds to the reverse regulation of human blood glucose concentrations by glucagon and cooperates with the enhanced adjustment unit to complete the stable elimination of the control deviation on the basis of the enhanced adjustment. Similarly, the corresponding suppression adjustment algorithm is designed as follows

where
According to the design of the Hill decline function of hormone regulation, the same coefficient n in the Hill function is taken as 1; then

where B1 and B2 are two adjustable parameters greater than zero.
Antagonistic regulation algorithm
Under the framework of neuroendocrine control, the antagonistic functions of insulin and glucagon in the regulation of blood glucose concentration can be used to synthesize the control functions of the enhanced and inhibitory regulatory units. In antagonizing the deviation of the control system, when the deviation is large, the enhanced regulatory unit performs a relatively dominant role. On the other hand, when the deviation is small, the control effect of the inhibitory regulatory unit is strengthened. Antagonistic adjustment is generally in a state of dynamic balance so that it can quickly and stably eliminate the deviation, which is fully consistent with the human neuroendocrine regulation mechanism. Combining the control algorithm of the enhancement adjustment unit and the suppression adjustment unit, the algorithm for antagonizing the adjustment unit is designed as follows

To satisfy the correlation between the enhanced control output and the suppressed control output difference, an antagonistic control regulation linear function

Single-neuron PID control unit algorithm
To endow the neuroendocrine controller with good adaptability and robustness, the secondary control unit uses a single-neuron PID control unit based on PID control. This design fully draws on the principle of coordination between the human nervous system and the endocrine system. In practical industrial applications and other occasions, the control algorithm also enables the control system to adjust the control parameters in real-time and effectively respond to complex control objects, such as linear motors.19,20
According to the neural network control principle, the input signals of a single-neuron PID control unit are
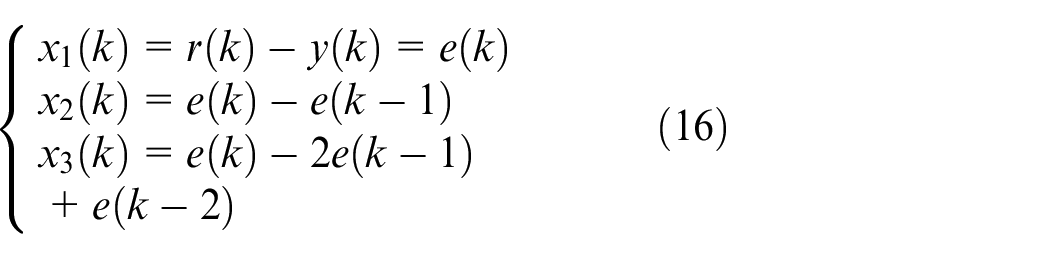
where

Thus, the output of a single-neuron PID control unit is
where K is the neuron proportion coefficient (>0) and
Ultrashort feedback unit algorithm
The ultrashort feedback unit is based on the regulation of hormones in the neuroendocrine system and uses the rate of change in the output of the controller itself as feedback. The algorithm of the ultrashort feedback module is as follows
Synthesis algorithm
The final signal output of the controller is a linear combination of the algorithm of each module. That is the formula
Control system and analysis of experimental results
PMLSM control system
To verify the feasibility and superiority of the proposed neuroendocrine control of the PMLSM over other control algorithms, a corresponding control system was established, and experiments on the parameters, such as linear motor speed and load, were performed. The vector control method was used in the system, and space vector model pulse width modulation (SVPWM) technology was used to perform the mathematical model coordinate transformation, thereby establishing a position, speed, and the current three closed-loop vector control system. The system mainly includes a vector conversion module, an SVPWM module, a three-phase inverter module, a speed and position detection module, and a linear motor, among others. The system control block diagram is shown in Figure 3.
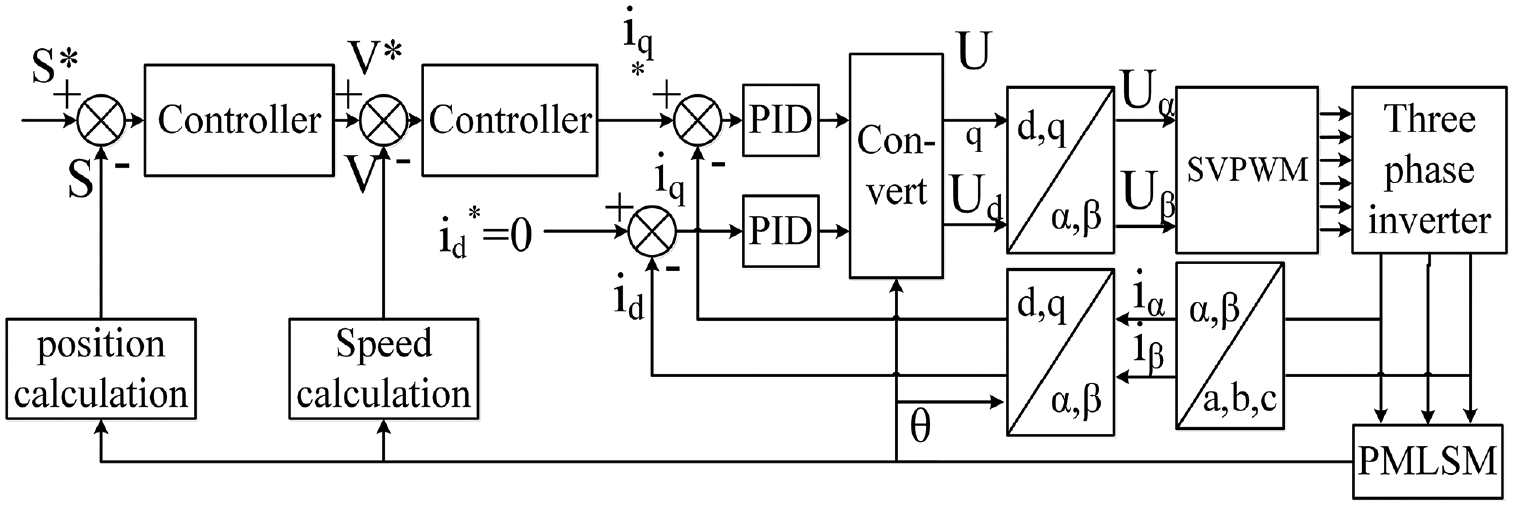
Structure of the PMLSM vector control system.
The servo control system hardware consists of a main control circuit unit, a detection circuit unit, a protection circuit unit, and other parts and can communicate with the host computer. The details of the hardware system structure are shown in Figure 4. The digital signal processor chip TMS320F2812 is the core chip of the main control circuit unit.21,22 A Hall sensor and grating scale were used in the detection circuit to obtain the current and position signals of the linear motor, and an intelligent power module (IPM) was used in the inverter circuit for power conversion. The three-phase inverter adopts IPM to realize the conversion of SVPWM signals and control voltage.
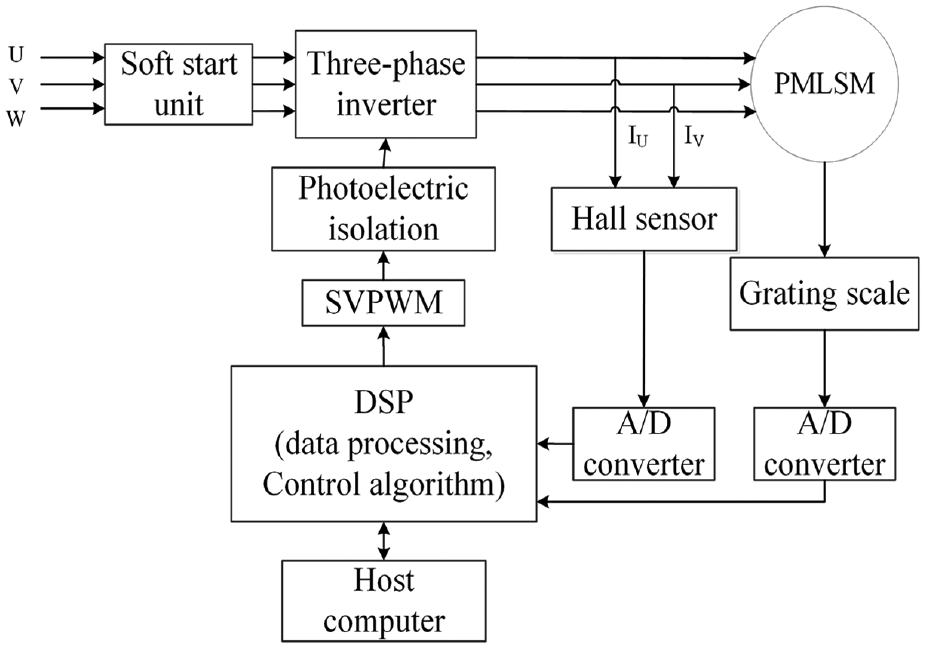
Hardware structure of the control system.
To verify the superiority of the neuroendocrine control of the PMLSM over other similar systems, comparison of the control performance between the proposed intelligent controller and PID control algorithm was performed. In the experimental system, the relevant parameters of the PMLSM are as follows:
Variable speed and constant load experiment
In the variable speed and constant load experiment, the linear motor load is fixed, and the variable velocity signal is analyzed to verify the speed and stability of the control algorithm applied to the linear motor control system. The speed tracking response curve is shown in Figure 5. The set target speed was observed to change between 0.1 and 0.3 s. Comparison of the two speed response curves revealed that the PID control requires a long time to track a given signal in the case of different amplitudes and direction of the speed changes, and a certain degree of speed fluctuations occurred. By comparison, according to the motor thrust response curve shown in Figure 6, the motor thrust waveform controlled by the neuroendocrine algorithm has a faster and more effective response, and the fluctuation amplitude is smaller. These findings indicate that the control adjustment of the motor operation is more stable and effective.
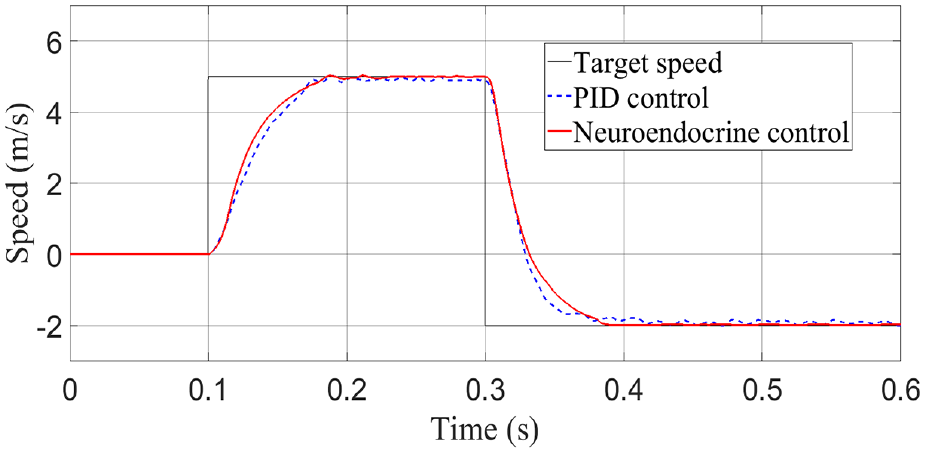
Variable speed tracking response curve.
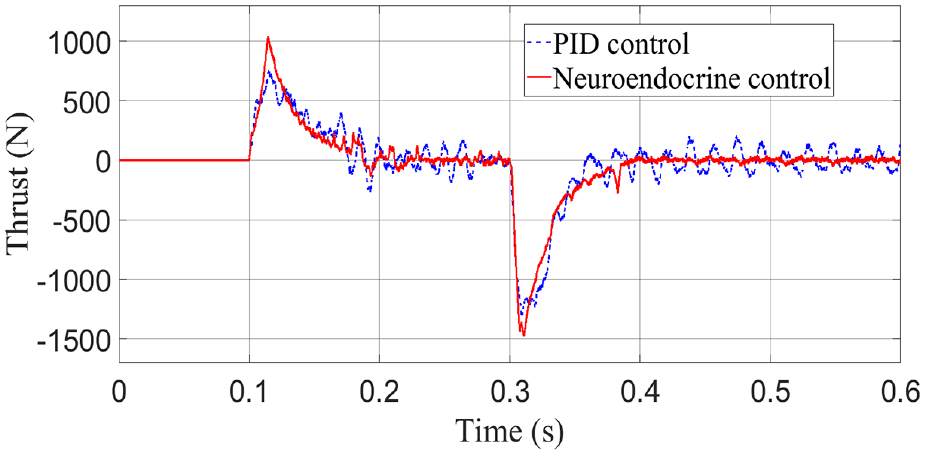
Variable speed thrust curve.
Constant-speed variable load experiment
In the constant-velocity variable load experiment, the speed of the linear motor is set to 3 m/s, and the load is adjusted during the operation process. The motor speed change and thrust curves obtained with the two control methods are compared and analyzed. The speed response curve of the constant-speed variable load state is shown in Figure 7. Here, the speed of the linear motor under PID control presents obvious jitter when the load changes. However, when the proposed neuroendocrine algorithm is used, the motor speed changes only slightly and quickly returns to its original state. The thrust response curves of the constant-speed variable load simulation experiment are shown in Figures 8 and 9. Comparison of the two figures indicates that the neuroendocrine algorithm control used in PMLSM can suppress the thrust pulsation more effectively than the PID control.
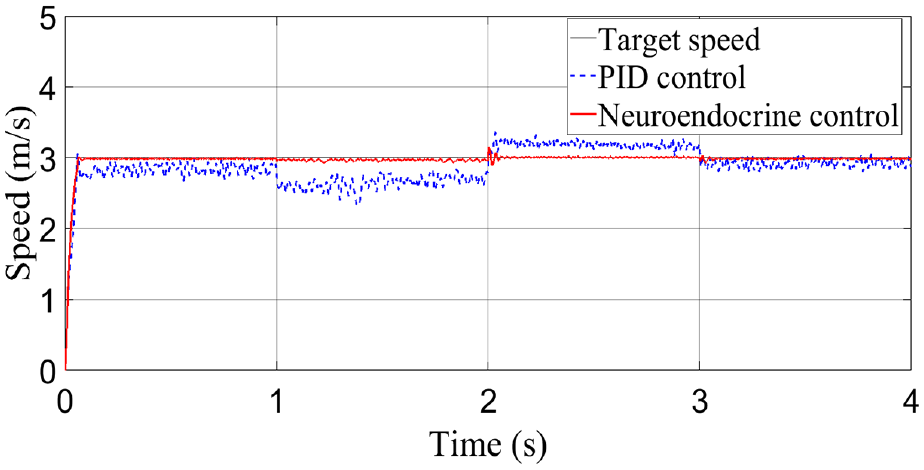
Variable load speed response curve.
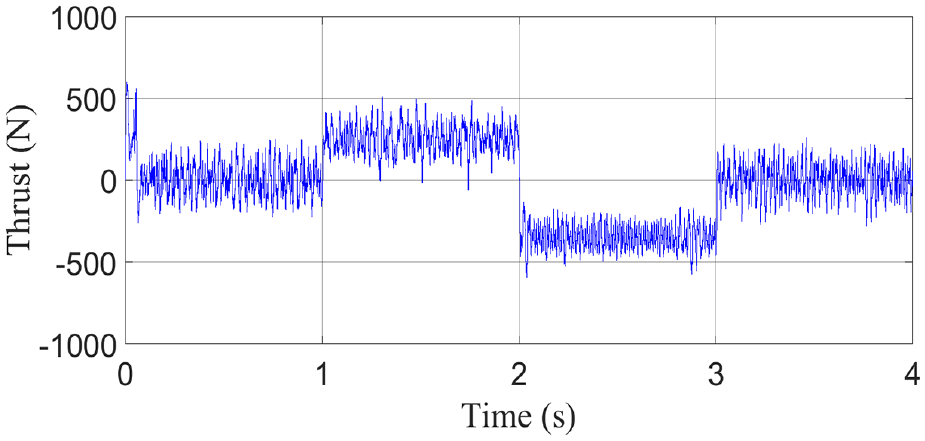
Variable load thrust response curve by PID control.
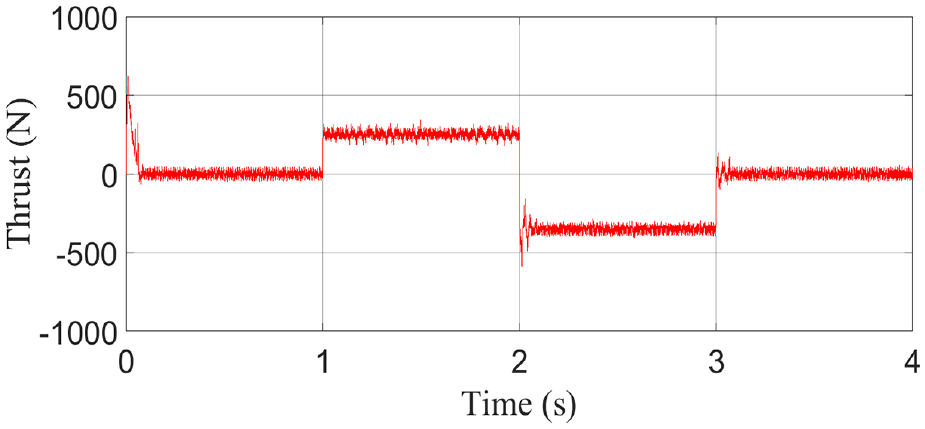
Variable load thrust response curve by neuroendocrine algorithm control.
Conclusion
PMLSMs present the characteristics of a complex mathematical model, strong nonlinearity, and multiple disturbances, which causes difficulties when adapting the traditional control method to high-precision servo control applications. Following analysis of the mathematical model of the motor and the establishment of a vector control system, this paper proposes an intelligent control algorithm based on the human neuroendocrine system. The controller mainly includes a hypothalamic regulation module, a single-neuron PID module, and an ultrashort feedback module. It is designed and referenced to the long feedback, short feedback, and ultrashort feedback loop mechanisms of neuroendocrine hormone regulation and abides by the principle of human neuroendocrine hormone regulation. The antagonistic hormone regulation module achieves rapid and stable elimination of errors through the fusion of enhanced regulation with regulation inhibition, and the single-neuron PID module enhances the adaptive and self-learning capabilities of the control system.
In this paper, based on the mathematical model of the PMLSM vector control system, and using the proposed control method, the experimental research is carried out, and compared with PID control. Through the comparison of the experimental results of linear motor speed, thrust, and response time under variable-speed constant load control and constant-speed variable load experiment, it can be concluded that the intelligent control based on the neuroendocrine algorithm can significantly improve the dynamic response performance of the level and effectively improve the system robustness. The proposed algorithm can also quickly and stably eliminate system deviations while improving self-adaptation and self-learning abilities. The proposed intelligent controller supplements and enriches the existing intelligent controller, but it needs to be further tested and improved according to the application object. In addition, can we use the other information processing mechanisms of the endocrine system to propose new endocrine strategies, or develop other forms of compound endocrine strategies? That is to be further researched.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work is supported by the Fundamental Research Funds for the Central Universities (Grant No. JZ2019HGTB0082). The support provided by China Scholarship Council (CSC) is also acknowledged.