
Abstract
This paper investigates the robust consensus tracking and formation control problems of multiple second-order systems having exogenous disturbances and no velocity measurements. To account for the input saturation constraint in controller design, a novel notion of local neighborhood synchronization error is proposed, which is obtained using generalized saturation functions and can be regarded as a nonlinear variation of the well-known linear local neighborhood synchronization error. An important property of the notion is proved and then a continuous distributed controller is designed using it. To improve the robustness of the controller with respect to exogenous disturbance, a disturbance estimator–based design and a simple parameter mapping for parameter tuning are proposed. The resulting error system is proven to be small-signal
Keywords
Introduction
In recent years, distributed coordination of multi-vehicle systems (MVSs) has attracted much attention due to its practical significance. Two important types of cooperative control problems, the synchronized trajectory tracking problems and the distributed formation control problems, have been studied in the past decade. In a synchronized trajectory tracking problem, a given reference signal is required to be tracked by each vehicle with local interaction. The objective of a formation control is to ensure each vehicle involved in the group stay in a fixed pattern (or a geometric shape). It has been extended to allow these vehicles to follow a certain dynamic pattern, and representative works on the two topics include, but are not limited to previous works.1–7
However, the synchronized trajectory tracking and formation control under a given input constraint without using velocity measurements have not received much attention. On one hand, as far as the robust synchronized position tracking problem of MVS is concerned, the velocities of each vehicle and its neighbors are often assumed to be available in most existing works.8–11 On the other hand, these works11–14 have considered the input constraint in designing controllers without using velocity signals. The works12,13 focus on the problem of synchronized velocity tracking rather than position tracking.
Motivated by the above observations, the synchronized position tracking and formation control problems of multiple second-order systems are considered, and a robust distributed solution is aimed to develop without using any velocity signals under the input constraint. The communication topology among the group of agents is modeled by an undirected graph, and only partial agents in the group have access to the desired position trajectory information. The main technical contributions of this paper are threefold:
The notion of prior bounded local neighborhood synchronization error (LNSE) is introduced, which can be regarded as a nonlinear variation of the standard LNSE used in previous works.8,15,16 A lemma to show the relationship between the convergence of position tracking errors and the convergence of the prior bounded LNSEs is proposed. This work has been included in our previous conference papers 14 and 17 .
Using the notion of prior bounded LNSEs, a robust control scheme for synchronized trajectory tracking of multiple second-order systems without velocity measurements is designed. The scheme includes a tracker which can stabilize the nominal system globally asymptotically, and an uncertainty and disturbance estimator (UDE) to attenuate the effect of input disturbances. The scheme results in a continuous control signals for each agent and is different from the variable-structure schemes proposed in Khoo et al. 8 and Li et al. 18 The extension of the scheme for formation control application is also discussed.
An ingenious parameter mapping for UDE design is introduced and a simple parameter tuning approach is developed to reduce steady-state control errors via a single-parameter tuning.
The rest of this paper is organized as follows. Some preliminaries are reviewed and then the problem is formulated in section “Preliminaries and problem formulation.” Section “Main results” introduces the extension of LNSE, followed by some supporting lemmas and the main results of this paper. Simulation examples are shown to demonstrate the effectiveness of the control scheme proposed in section “Simulation results.” Section “Conclusion” concludes this paper.
Preliminaries and problem formulation
Notation and mathematical preliminaries

The generalized saturation functions (GSFs) which will be used in control design are now defined.
Definition 1
Let
then
With the definition of GSF, the following properties are presented:
P3: Assume that there exists a constant

P4:


Problem formulation
The mathematical model of the considered uncertain second-order system is

where
The desired trajectory is

and the formation control is asymptotically achieved if

The following three assumptions are set in this paper.
Assumption 1
For each
Assumption 2
The desired trajectory
Assumption 3
Main results
In the study by Li et al. 15 and Das and Lewis, 16 the LNSEs (which will be called as the standard LNSEs hereafter) are defined as

where
Let

The Laplacian
Lemma 1
Under Assumption 3,
Equation (7) can be written in the compact form
Clearly, there is a linear relationship between the vector
By the GSFs defined above, equation (8) is modified as

where

Then, the following technical lemma (Lemma 2) is proposed.
Lemma 2
If
Proof
Since a GSF

where

with the coefficient matrix
where

With property P3,
Tracker design
Equation (4) with

where

where
The following distributed controller is proposed for equation (16) using equation (10)


where
Then, the following inequality can be obtained by substituting equation (19) into equation (18) for

the inequality shows the control input
Based on the preparations above, the following theorem is ready to be presented now.
Theorem 1
Consider the control input given by equation (18) with equation (19) of the n-dimensional nominal system (equation (16)). Under Assumptions 2 and 3, that is, the graph

then, the following results have been obtained: (a)
Proof
From equations (20) and (21), result (a) can be readily proved. For proof (result (b)), Lyapunov-based approach is used, and the Lyapunov function candidate is presented in the following

Each term of
The time derivative of


Since
with which equation (27) becomes


It is obtained that

Since

Then, the boundedness of

From equations (19), (31) and (32)

Under the dynamic system (equation (19)), this implies that the conditions of Lemma 2 are satisfied. Thus,
Remark 1
By Assumption 2, the second-order derivatives of
UDE-based robustness improvement
For equation (4) with

where
The disturbance estimation error

and

The following UDE proposed in Zhu et al.
21
are used for all

where
The transfer function from

It is practically important to find a single design parameter which is closely related with the closed-loop steady-state performance. In particular, to make parameter tuning easy, it is expected that the relationship is as simple as possible. To this end, the following parameter mapping is proposed

where
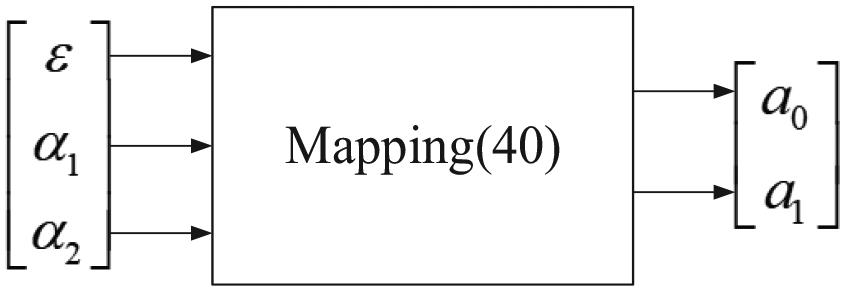
The approach to determine disturbance estimator parameters
Then, the transfer function (equation (39)) can be rewritten as

Note that

With the parameter mapping, it is readily obtained that when
Lemma 3
Under Assumption 1, the (globally) ultimate boundedness of
1. If the time derivative of

then for any initial condition

2. When equation (43) is not satisfied, the parameter

Lemma 3 implies that the steady-state errors can be controlled by a parameter tuning approach. From equations (4), (18), (34) and (35), the closed-loop error equations are obtained

The following analyses are focused on the closed-loop stability of equation (46)
Lemma 4
Consider the system (46) with
Proof
Consider the same Lyapunov function candidate as equation (24). The derivative of
Define
Then it is readily to obtain the inequality
For the general case with
Lemma 5
Consider the closed-loop system (equation (46) with equation (10)),
Proof
The system state and output for equation (46) are denoted by

where
The Jacobian matrices of
Under Assumption 1,

for any
By combining the results of Theorem 1 and Lemmas 3–5, the following result is obtained.
Theorem 2
Under all the assumptions defined in this paper, consider the closed-loop system (equation (46) with equations (4) and (10)). If all the conditions of Lemma 3–5 are satisfied and
Remark 2
Compared with other relevant approaches, the advantages of the proposed approach in this paper are summarized in the following two aspects: (1) our approach yields continuous control signals and actuator chattering is avoided compared with sliding-mode control approaches. Since both the UDE and nominal tracker are continuous, the resulting control signal is continuous. However, a sign function is included in standard sliding-mode controllers, and actuator chattering issue cannot be avoided. (2) The proposed approach is simpler than most of the relevant approaches proposed in recent literature. The simplicity lies in the following three aspects. First, the controller is structurally simple and has a relative-lower order. It consists of two components: the nominal control and the output of UDE. Their roles are separated from each other. Second, the parameter condition for the closed-loop stability is simple. The design parameters are only required to be positive real numbers to guarantee the stability. Third, the parameter tuning approach to control the ultimate bounds of synchronization errors (or tracking errors) is simple. Based on this approach, the steady-state control errors can be reduced via a single-parameter tuning.
Formation controller design
Considering the second-order system (equation (4)),

Define an auxiliary variable

Then, equation (54) is equivalent to

with the auxiliary variable
From equation (55), the following is obtained

Considering the input replacement

Considering the input disturbance

Then, the design of formation control has been converted to a design of consensus control
Besides, equation (10) can be converted as

where
Applying equations (18) and (19)–(58),


Remark 3
Note that the dimension of
Simulation results
The position consensus tracking and formation control of a team of
The associated undirected communication digraph
The control gains
The initial states of the four agents are as follows





The desired position signal is a ramp function, where

Choose GSF
The communication graph used in this section.
In the following, four simulation cases are considered based on the main results in this paper. MATLAB 2016a is used as the simulation tool and is assumed that the sampling time is fixed to be 0.001 s and the solver is ode3 (Bogacki–Shampine).
Case 1: position tracking without disturbance
Consider system (equation (16)) with controller (equations (18) and (19)) in 2D space with the simulation conditions. Figure 3 shows the results of this case. The following three points are obtained: each position trajectory
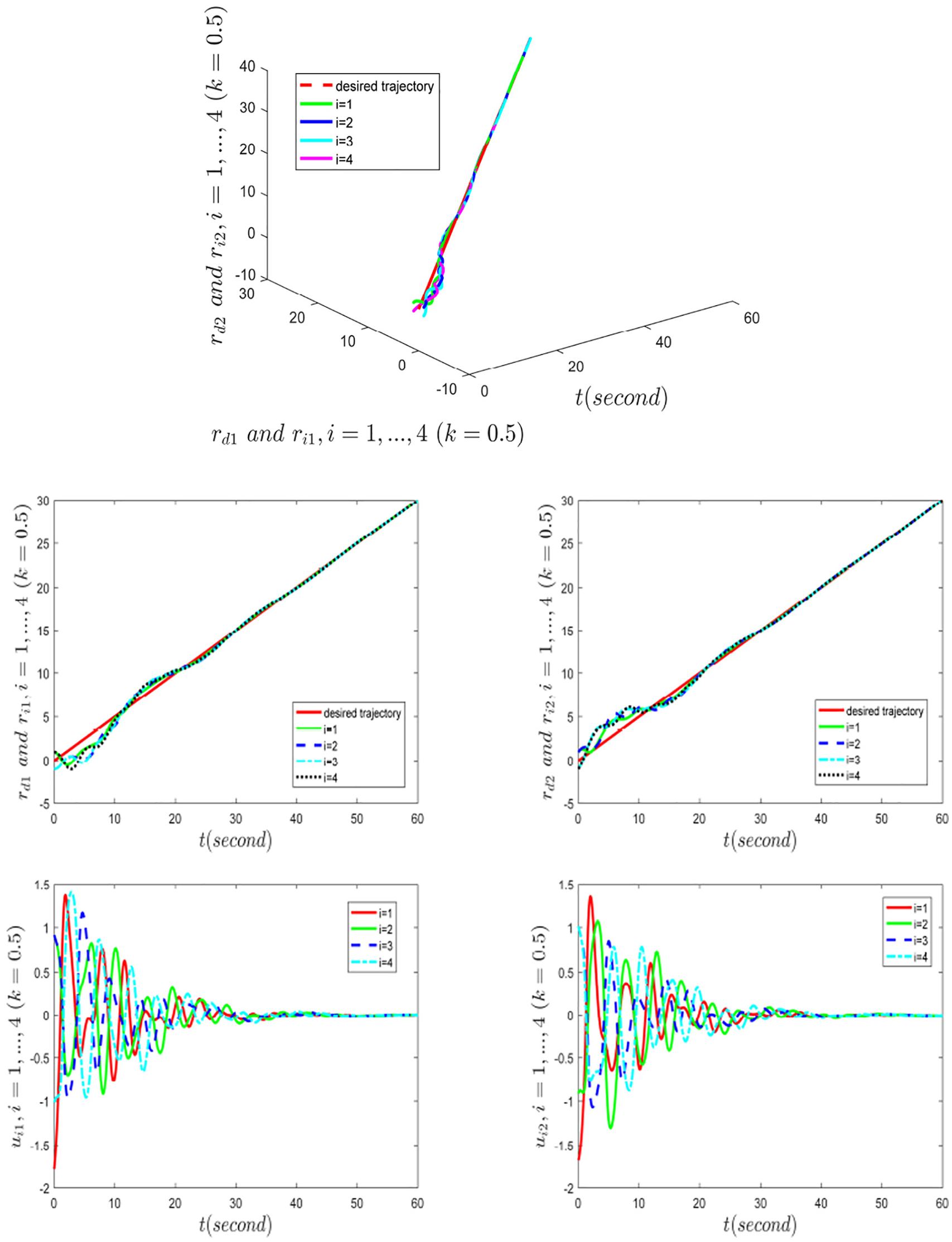
Simulation results of Case 1.
Case 2: position tracking with UDEs to reject constant
In this case, the position tracking with UDEs is considered to reject constant disturbances. The disturbance is given as

It is readily to obtain that
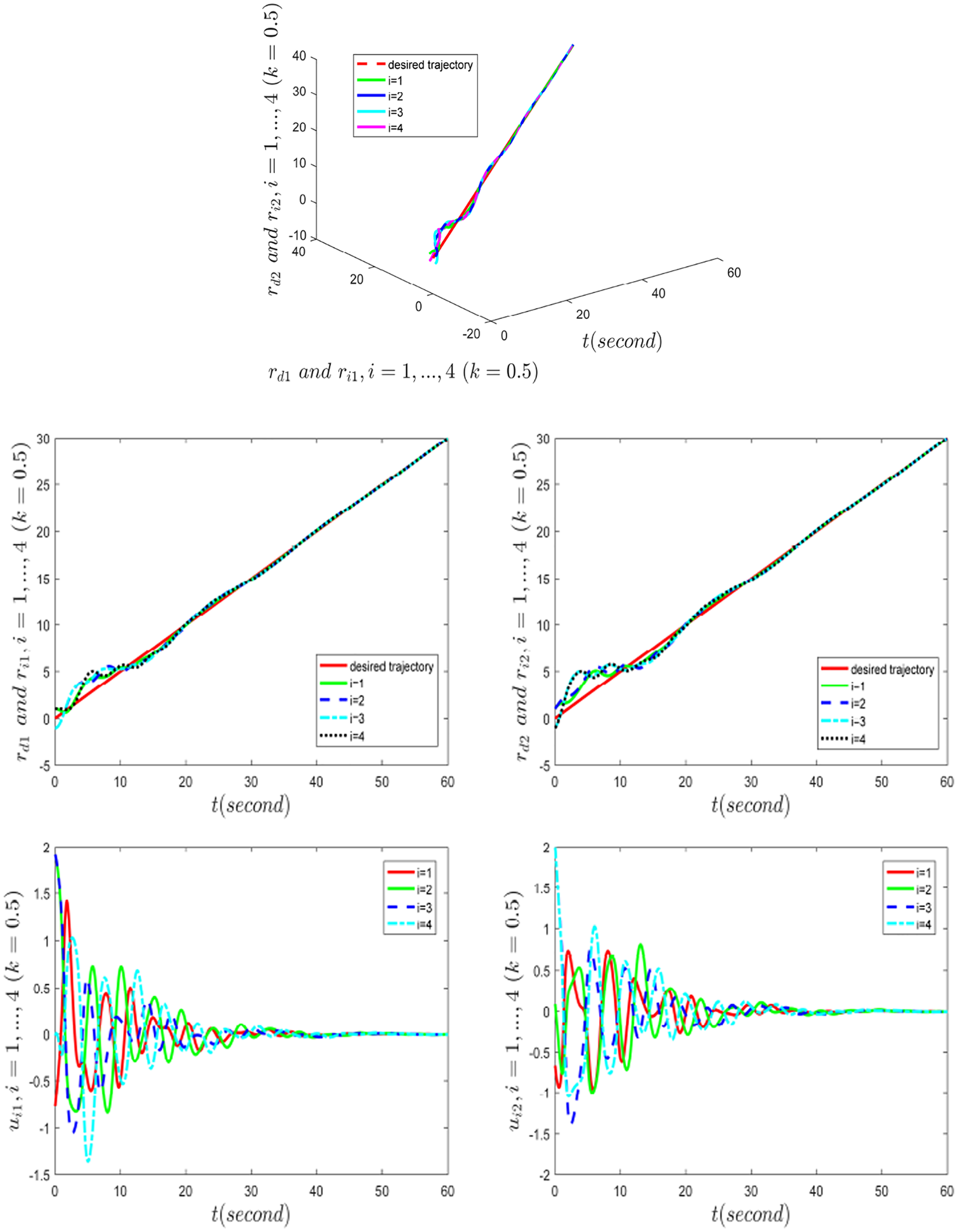
Simulation results of Case 2.
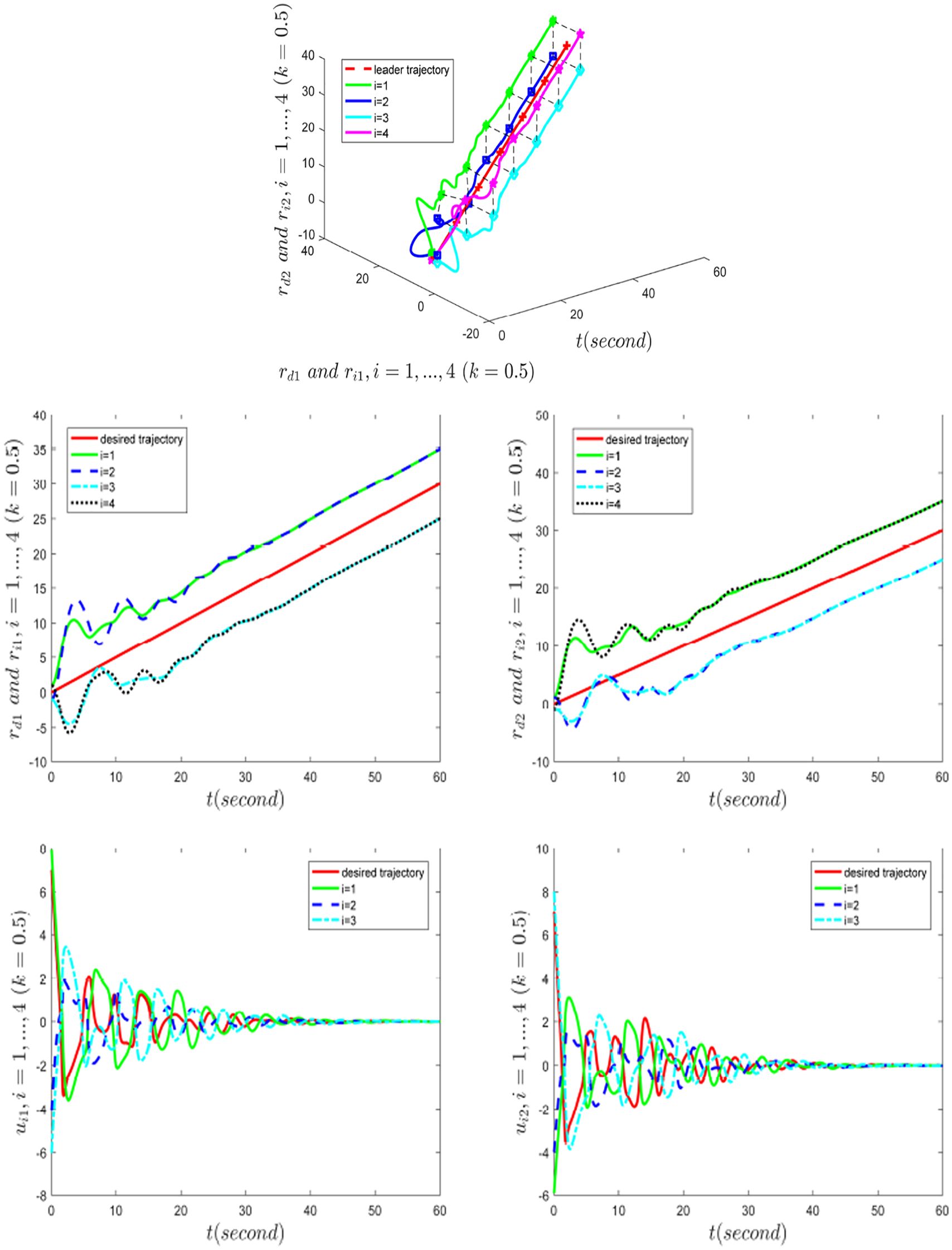
Case 3: formation control with
In this case, the desired position deviation is given as
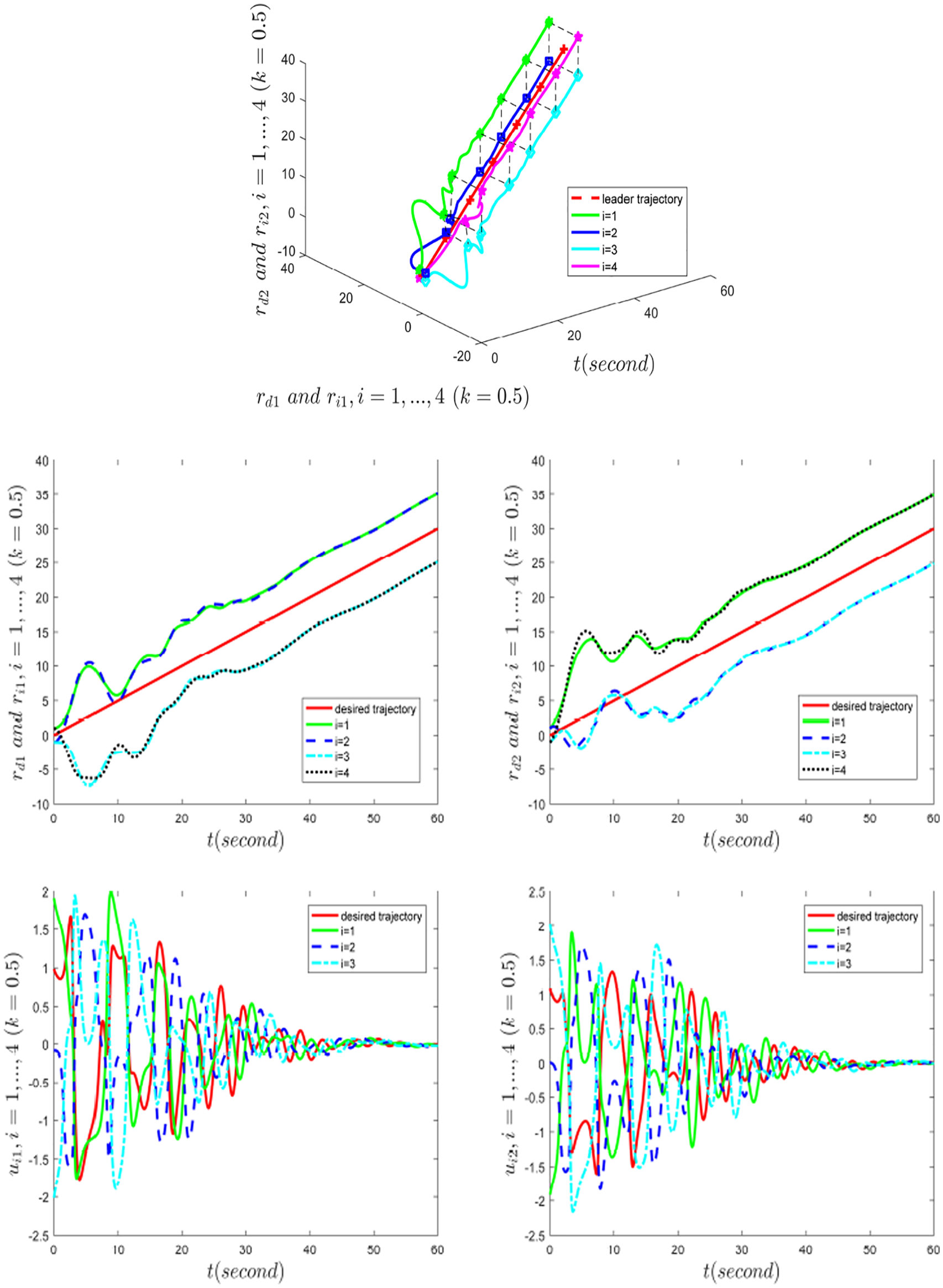
Simulation results of Case 3.
Case 4: formation control with UDEs to reject constant
In this case, the same UDEs as in Case 2 are used. Applying controller (equations (61) and (62)), the simulation results are shown in Figure 6. It is seen that the UDEs reject the disturbances effectively, and the square formation is achieved and the controllers are converged to 0 as time increased.
Simulation results of Case 4.
Remark 4
From the simulation examples, it is seen that the system trajectories suffer from quite obvious oscillations; the reason is twofold: (a) note that the control design in this paper is limited by input saturation constraint, the simulation results are compared in Zhu et al. 21 (with no control input constraint) and in this paper and it is obvious that the control input constraint is the primary reason to cause system oscillations. (b) the velocity measurements are assumed to be unavailable in this paper; velocity information are not used to design a controller, and this will make system damping smaller.
Conclusion
In this paper, the synchronized trajectory tracking problem of a group of agents with multiple second-order dynamics without velocity measurements is studied first, taking into account the input saturation constraint. Then, the position tracking problem is extended to the formation problem by adding the desired position deviation of each agent from the leader’s trajectory. The effectiveness of the presented control schemes is illustrated by numerical simulation results. In future work, the effects of design parameters on the convergence rate are studied systematically.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.