
Abstract
This paper presents a novel design of adaptive super-twisting sliding mode controller for two-axis helicopter with model uncertainties. The high-order super-twisting sliding mode control strategy is used to guarantee that the sliding surface can reach the equilibrium point in a shorter time and to avoid the chattering problem. The adaptive control algorithm has been developed based on Lyapunov theory to estimate the unknown parameters of 2-degree-of-freedom helicopter such that the global stability of the controlled system based on adaptive super-twisting sliding mode is guaranteed. A comparison study between conventional and adaptive super-twisting sliding mode controllers is made and the effectiveness of the proposed scheme is verified via computer simulation.
Keywords
Introduction
Nowadays, aerial robots are used in different military and civilian applications, such as border patrolling, geological surveying, traffic monitoring and surveillance, search and rescue, reconnaissance missions, environment exploration, area mapping and structure inspection and aerial cinematography, in which risks to pilots are often high. Rotorcraft has an evident advantage over fixed-wing aircraft for various applications because of their vertical landing/take-off capability and payload. 1
Recently, research works on air vehicles are rapidly increasing due to requirements and technological advancements. Acceptable new designs enable different types of aircraft to have effective vertical take-off and landing. One of the well-known vehicles of this type is the conventional helicopter with hovering, high maneuverability and flying at very low speeds. Thus, autonomous or non-autonomous helicopters have attracted the attention of many researchers in military and civil fields. Helicopters serve a wide range of applications, including transportation, rescue operations, firefighting, traffic control and tourism. 2
Helicopter systems are nonlinear, highly cross-coupled, unstable and difficult to model. The system parameter identification of helicopter model is a complex problem; a number of experiments are described to determine all system parameters. Due to the inaccuracy of these experiments, the model has to deal with a significant amount of parameter uncertainty. Moreover, the flight control problem involves many complications. Altitude, payload, weather conditions, complex mechanisms, nonlinear aerodynamics and changes in flight conditions may disturb flight stability. The control algorithm for aerial vehicles should overcome these difficulties. 3
Thanks to the sliding mode controller (SMC) structure having strong ability to deal with high nonlinearity and parameter fluctuations of control systems and thus it may help to improve system stabilization. In variable structure control theory, the conventional sliding mode controller (CSMC) structure is known as an essential topic. The CSMC increases the robustness of the system and compensates parameter fluctuations.4,5
The super-twisting algorithm (STA) is one of the most advanced and widely used second-order sliding mode (SOSM) algorithms and it is characterized by considerably reducing the amount of chattering. This control strategy is robust against internal and external parameter uncertainties. In addition, since the control technique does not need derivative feedback of the sliding variable, it is not sensitive to disturbance and noise. As such, this method is one of the leading candidates used in control of most actual systems for many applications.6–8
The following literature interviews and focuses specifically on different structures of sliding mode control for 2-degree-of-freedom (DOF) helicopter system. Yu and Liu 2 presented a novel design for control of 2-DOF helicopter. This control design is composed of two structures: sliding mode control and linear quadratic regulator (LQR). The LQR is used to control and stabilize the motions in yaw and pitch channels, while the sliding mode control is devoted to guarantee the robustness of the overall system against external disturbance. 2 Ahmed et al. 9 presented a robust control algorithm based on a super-twisting 2-sliding mode control (2-SMC) to cope with uncertainty in center of gravity (COG) of 2-DOF helicopter due to variation of mass distribution.
Zaeri et al. 10 designed a fuzzy sliding mode controller with boundary layer (FSMC-BL) for 2-DOF helicopter subjected to disturbance. The SMC is designed to give robust characteristics against disturbance and the fuzzy logic controller is used for online tuning of switching gain of SMC law to reduce the chattering behavior. The proposed structure has been compared to proportional–integral–derivative (PID) control based on LQR algorithm, where better enhancement in performance has been shown with FSMC-BL.
Zare and Koofigar 11 presented an adaptive SOSM controller to control elevation and azimuth angles of a helicopter with 2 DOFs. The controller has been designed to ensure stability, path tracking and robustness in the presence of bounded disturbances and uncertainties despite the effects of coupling. The PI-based sliding mode control is used to solve the problem of offset and zero convergence of error. The SOSM controller is presented to avoid the chattering phenomenon, while the adaptive switching gain strategy adopted in the design dispenses with the upper bound of system uncertainties.
Qu et al. 12 proposed sliding mode control scheme based on disturbance observer for helicopter. The disturbance observer is used to estimate the unknown disturbance of the system, while the sliding mode structure is designed to compensate for unknown uncertainties and disturbance, to guarantee convergence of error to go to zero. The quantum information technique has been included to improve the self-repairing accuracy of helicopter system.
Taimoor et al. 13 presented two control designs based on sliding and integral sliding mode (ISM) control to eliminate the effects of cross-coupling in the twin-rotor system, which leads to tainted action during the maneuver of twin-rotor system. The inclusion of sliding and ISM control could decouple the cross-coupling in variables of both yaw and pitch channels and achieve the desired performance. A comparison study between classical and integral SMCs has been established based on computer simulation.
Sadala and Patre 14 presented a new robust controller for position control of both yaw and pitch angles of 2-DOF helicopter. The control algorithm is composed of two continuous control schemes, composite nonlinear feedback (CNF) and super-twisting control (STC) techniques. The continuity of well-known STC could reduce the chattering due to the presence of discontinuous term in ISM control based on CNF control law.
Basri 1 presented an adaptive backstepping sliding mode control (ABSMC) for stabilizing, tracking and position control of a quadrotor aerial robot subjected to external disturbances. The control structure combines a backstepping and a sliding mode control technique. An online adaptation law is developed to avoid a necessity for knowledge of a bound of external disturbance. Particle swarm optimization (PSO) algorithm has been used to find the optimal parameters of the controller.
Kavuran and Yeroglu 3 presented a real time–based control using sliding mode control scheme with small differential deviations for 2-DOF helicopter system. The proposed controller could improve the steady-state errors of motion for both horizontal and vertical channels. It has been shown that smaller differential deviations lead to better tracking behavior against applied external disturbances.
Lambert and Reyhanoglu 15 proposed observer-based sliding mode control strategy to achieve trajectory tracking and perform attitude regulation to desired trajectory for 2-DOF helicopter system. A sliding mode observer has been designed to estimate the unmeasured angular velocities in both yaw and pitch channels. Analysis based on Lyapunov theory has been presented to guarantee the asymptotical stability of the 2-DOF helicopter systems based on SMC. Another stability analysis based on Lyapunov has been presented to prove the convergence of estimation errors for sliding mode observer to their equilibrium zero points. A comparison study between observer-based SMC strategy and a conventional PID controller has been made based on experimental results.
In the above literature, various control strategies are devoted to the control of 2-DOF helicopter system. However, it is interesting to interview new advances in sliding mode strategy in order to incorporate them in control of the helicopter system in future works. Wang et al. 16 proposed a new adaptive control (adaptive time-delay control (ATDC)) scheme for cable-driven manipulators with lumped uncertainties. The proposed ATDC scheme consists of three terms, namely, time-delay estimator (TDE), fractional-order nonsingular terminal sliding mode (FONTSM) error dynamics and adaptive laws. The TDE works to estimate the unknown system dynamics using time-delayed signals. The FONTSM manifold together with reaching law based on fast terminal sliding mode (TSM) can give a fast dynamical response and high tracking accuracy in both sliding mode and reaching phases. The role of adaptive laws is to simultaneously give both good robustness characteristics and effective suppression capability of chattering. In addition, further control enhancement is performed using chattering-free adaptive gains.
Zakeri et al. 6 presented a novel second-order SMC for fully actuated and underactuated nonlinear systems under uncertainty by introducing an interval type-2 fuzzy fractional-order super-twisting algorithm (IT2FFOSTA). The proposed IT2FFOSTA could enhance the fractional-order super-twisting algorithm (FOSTA) by utilizing the feature of interval type 2 fuzzy fractional-order sliding surface (IT2FFOSS). The FOSTA could considerably suppress the chattering behavior, while the IT2FFOSS could successfully reduce the tracking error, control effort and chattering level. A hierarchical sliding surface is employed to control the underactuated system. The multi-tracker optimization algorithm is utilized to adjust the controller’s parameters; this leads to optimal performance for the IT2FFOSTA. 6
Wang et al. 17 proposed a new adaptive fractional-order nonsingular terminal SMC based on time-delay estimation for precise tracking control of 2-DOF cable-driven manipulator under lumped uncertainties. By virtue of TDE, the unknown system dynamic and lumped uncertainties are estimated and compensated such that the feature model-free controller can be gained. The role of FONTSM control is to reach high precision in steady state. The proposed control scheme could satisfy fast convergence and low chattering characteristics by combing both adaptive techniques with reaching law. 17
Wang et al. 18 presented adaptive super-twisting FONTSM control based on time-delay estimation for the cable-driven manipulators. The time-delay estimation element is used to establish a model-free control strategy by estimating the system dynamics. The adaptive super-twisting scheme is utilized to reach both high tracking precision and good robustness characteristics in reaching phase without the need of boundary information for lumped uncertainties. However, the FONTSM control is devoted to satisfy fast convergence, high tracking accuracy and strong robustness characteristics in sliding mode phase. 18
Throughout the design analysis of adaptive super-twisting sliding mode control, several design parameters emerge, which have to be properly chosen. However, the selection of these design parameters has to meet the stabilization requirement of the designed controller and, also, it has been shown that these design parameters have an impact on controlled system performance. Trial and error procedure for selecting their values is exhaustive, and it does not lead to an optimal solution in terms of best performance. In other words, the optimization problem represents the design parameters of a control algorithm. As such, a modern optimization technique is required to find their optimal values in an auto-manner. In this study, PSO algorithm has been suggested as an optimal tuner. PSO is an evolutionary computation technique that was proposed by Kennedy and Eberhart 19 in 1995. This algorithm was inspired by the behavior of organisms, such as bird flocking and fish schooling. Generally, this optimization technique is famous, and it is commonly used as an optimized tuner; since it is merely executed, quickly convergent and computationally efficient, it has the ability to find a local and global solution. 20 Other modern and generalized optimization techniques can be employed either to improve the optimization process or to make a comparison in performance among each other.21–23
The motivation behind this study is that the 2-DOF helicopter system is normally subjected to many uncertainties in parameters due to inexact modeling, variation of mass or environmental conditions. To cope with this variation of parameters, an adaptive control algorithm based on super-twisting sliding mode control has been developed and detailed design of this adaptive control strategy is performed to 2-DOF helicopter system. Therefore, this paper highlights the following contributions:
Design of adaptive super-twisting SMC for 2-DOF helicopter system.
A stability analysis based on Lyapunov theory is established for helicopter system controlled by adaptive super-twisting sliding mode control.
A comparative study has been made between the super-twisting sliding mode control and adaptive super-twisting sliding mode control for helicopter system based on the simulated results.
Application of PSO algorithm to find the optimal values of design parameters such as an improvement in dynamic performance is obtained.
This paper is organized as follows; section “Mathematical model of 2-DOF helicopter” presents the modeling of 2-DOF helicopter system. A novel design and stability analysis of super-twisting SMC for 2-DOF helicopter system is discussed in section “Design of super-twisting SMC for 2-DOF helicopter.” In section “Design of adaptive super-twisting SMC,” a novel adaptive law is developed for 2-DOF helicopter based on super-twisting sliding mode control design. In section “Optimization of the design parameters for the super-twisting SMCs,” an optimization problem and solution based on PSO is presented for the design parameters of adaptive super-twisting SMC such as to improve the closed-system dynamic. The simulated results are presented in section “Simulation results.” In section “Conclusion,” conclusions based on simulated results have been drawn.
Mathematical model of 2-DOF helicopter
Figure 1 shows a prototype of simple 2-DOF helicopter system. This aerodynamical system consists of two main rotors driven by direct current (DC) motors lying at the ends of a beam, which is pivoted on its base center and it can rotate freely in both vertical (pitch) and horizontal (azimuth) planes. 24
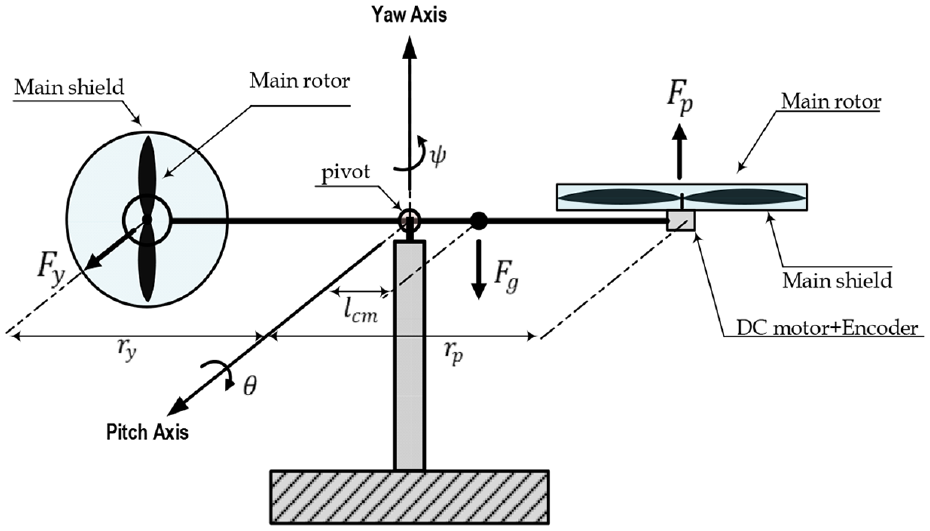
Schematic representation of 2-DOF helicopter.
The mathematical model of helicopter system can be described by 2-DOF and represented by angles
Based on the yaw and pitch rotation matrices and using the transformation of the coordinates, the center of aircraft mass is given by15,25,26



where

where
The gravitation force leads to the development of potential energy given by

The rotational kinetic energy on pitch yaw is represented by


where

where
The total kinetic energy

Defining the Lagrangian variable L to represent the difference between kinetic and potential energy of the system, that is

The equations of motion of Euler–Lagrange are derived according to the following set of differential equations 24


Therefore, the following generalized forces can be obtained


where
The Euler–Lagrange expressions of equation (8) can be expanded in terms of the forces described by equation (9) and the following equations of motion are obtained
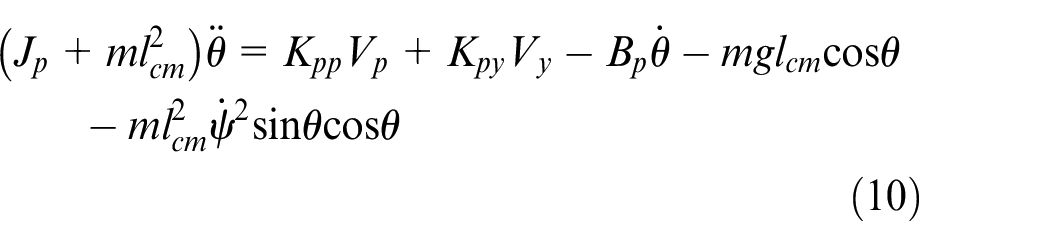

The above equations can be modified by introducing uncertainties in parameters


where the following notations are defined for model simplification




Remark 1
Design of super-twisting SMC for 2-DOF helicopter
First, the sliding mode control design is established for pitch channel with

where

The time derivative of equation (14) gives

Substituting equation (12) into equation (16), the following is obtained
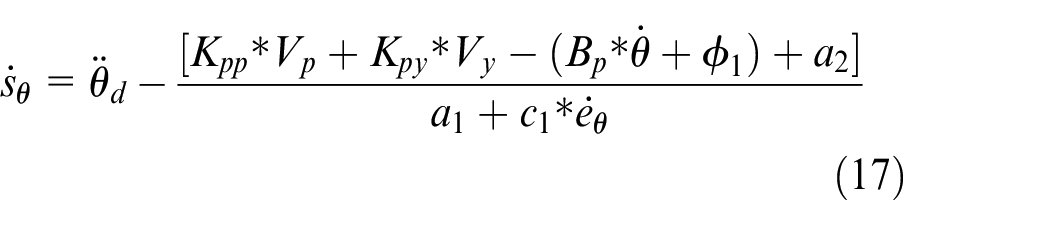
The pitching control signal consists of equivalent and switching control laws as follows

The equivalent control law can be defined as
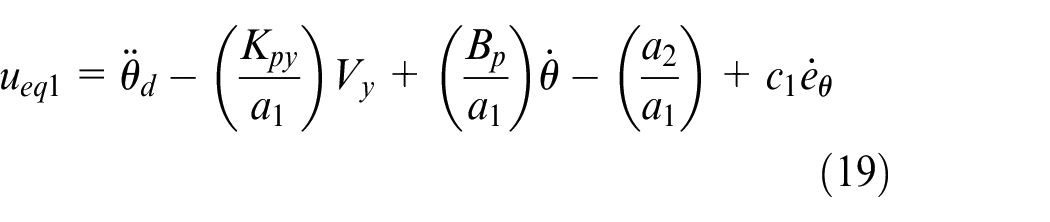
On the other hand, the switching control law is designed based on the STA. Based on this algorithm, the switching control law is set as follows

where
Then, substituting equation (21) into equation (17), the following is obtained

The same analysis as above can be pursued to design the SMC for yawing channel based on

where

Taking the time derivative of sliding surface equation to have

Using equation (13), equation (25) becomes
Substituting equation (21) into equation (26), the following is obtained
or
The yaw control signal

The equivalent law is assigned as
The switching control law component is given by

where
Substituting equation (32) into equation (28),
To investigate the stability of 2-DOF helicopter controlled by super-twisting controller, Lyapunov method is used. The Lyapunov candidate function is chosen to be quadratic in terms of pitch and yaw surfaces

The time derivative of the Lyapunov function can be computed as

Using equations (22) and (33), equation (35) becomes
or
Remark 2
In order to ensure the stability of the 2-DOF helicopter, the values of
It is clear that V is a positive definite, and
Remark 3
Super-twisting sliding mode control can make the system states reach the equilibrium point in a finite time, the brief mathematical expression of convergence time can be written as
where

The estimation of the convergence time T is optimal when
Design of adaptive super-twisting SMC
For the 2-DOF, it is assumed that the two parameters


or


Substituting equation (41) into equation (10), and equation (42) into equation (11), the following is obtained


Therefore, equation (21) can be rewritten as

where
or
Substituting equation (46) into equation (16), the following is obtained

Equation (32) is rewritten as
where
or
Substituting equation (48) into equation (50), the following is obtained
Substituting equation (51) into equation (25), the following is obtained
The Lyapunov function candidate has been chosen in terms of sliding surfaces

where

The time derivatives of the estimation errors are


Substituting equations (47), (52), (55) and (56) into equation (54), the following is obtained
Enforcing


The above equations are the source of emerging the adaptive laws, which can be determined as


The adaptive laws given by equations (60) and (61) are responsible for reducing the time derivative of Lyapunov function to be as follows
Figure 2 shows the block diagram of 2-DOF helicopter controlled by adaptive super-twisting controller.
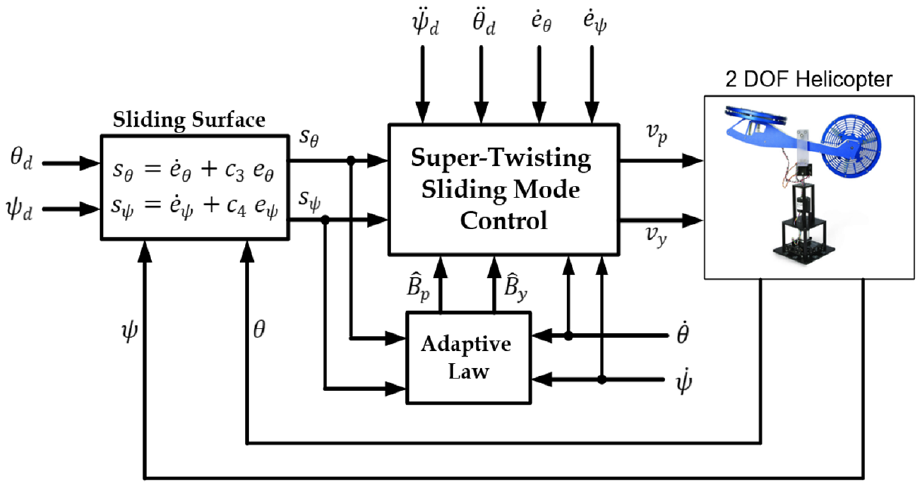
The 2-DOF helicopter controlled by adaptive super-twisting controller.
Optimization of the design parameters for the super-twisting SMCs
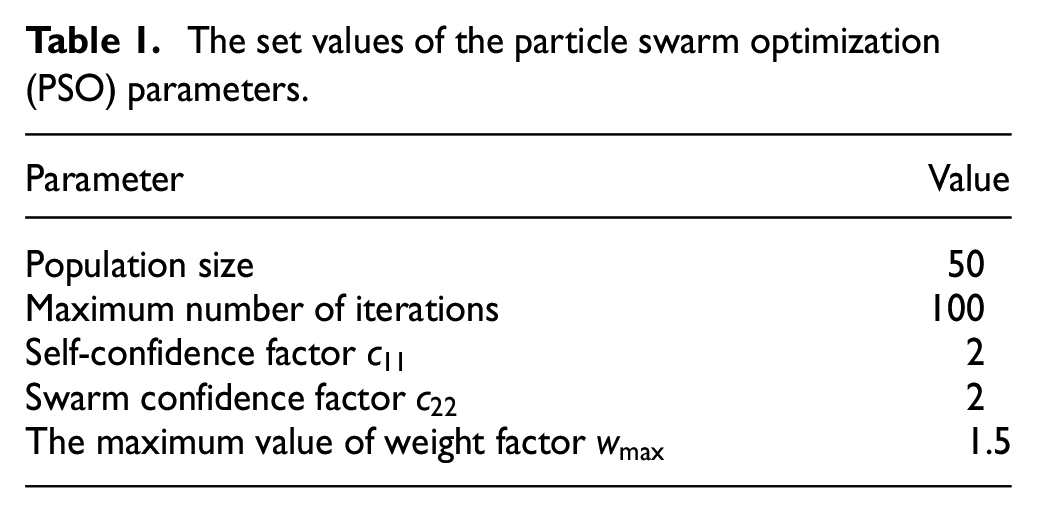
Throughout the design of the adaptive super-twisting sliding mode control algorithm, one issue arises, which is represented by selecting the values of design parameters for the sliding mode control algorithm. In this paper, a PSO algorithm was adopted for autonomous tuning and to find optimal values of these parameters.19,20 The problem of PSO can be defined as 27

where “Optimize” stands for

The expression of the integral time absolute error (ITAE) performance index has been selected to enhance the transient and steady-state performance of the controlled system in terms of minimum steady-state errors. It has been shown that the following candidate formula gives a good optimization search and in turn it leads to good dynamic performance.
In this work, the PSO is employed to tune the design parameters of both classical and adaptive super-twisting sliding mode control. The design parameters of classical super-twisting sliding mode control controller are
Each particle in the population is updated in each iteration according to two “best” values. The first best value is the best result (fitness) that has been found previously by the same particle, and it is indicated as

where

The updated position for each particle is described by

where
The set values of the particle swarm optimization (PSO) parameters.
Since, in the next computer simulation section, a comparison of the adaptive super-twisting sliding mode control with the super-twisting sliding mode control is intended, it is worth mentioning that the PSO tuner is utilized for tuning the design parameters of both the classical and adaptive controllers. The design parameters of a super-twisting SMC are
Optimal design parameters of both classical and adaptive super-twisting SMCs.
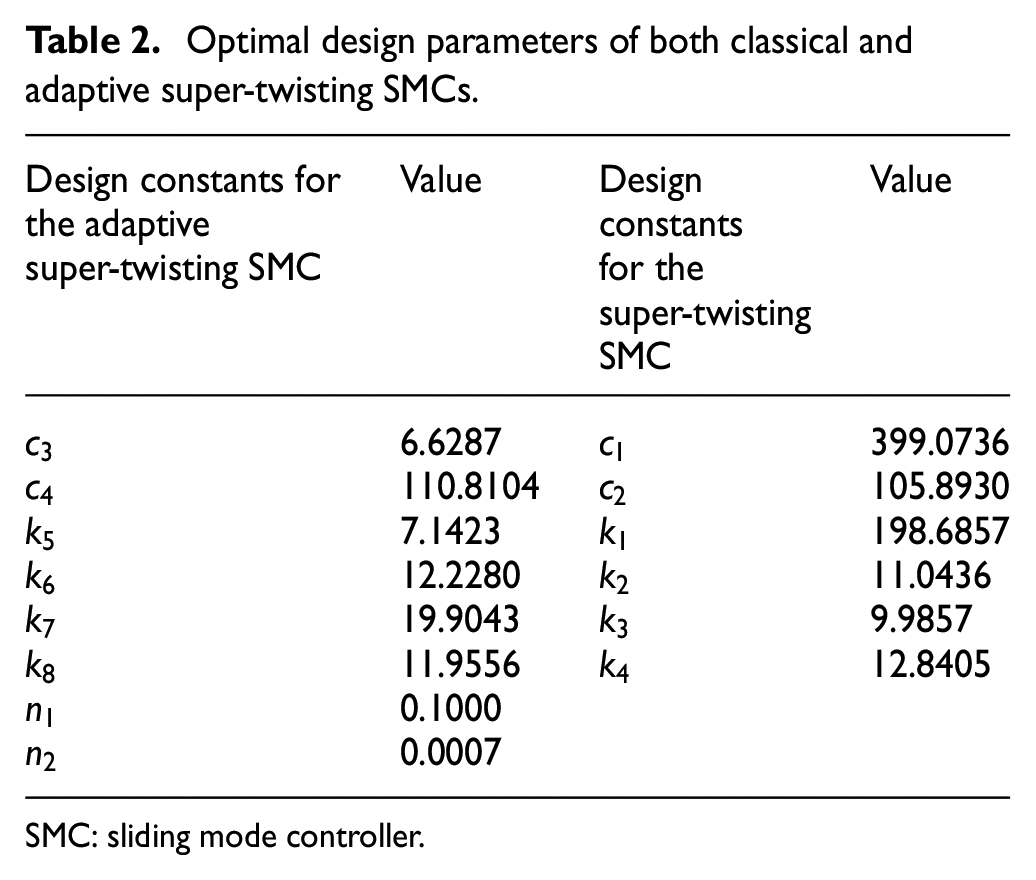
SMC: sliding mode controller.
Simulation results
In this section, the effectiveness of the proposed adaptive controller via the simulated results within the MATLAB environment is provided. A performance comparison study of the adaptive super-twisting SMC with the super-twisting SMCs performed and discussed through simulation. The model parameter values of the 2-DOF helicopter system are listed in Table 3. 14
The numerical values of the 2-DOF helicopter system parameters.
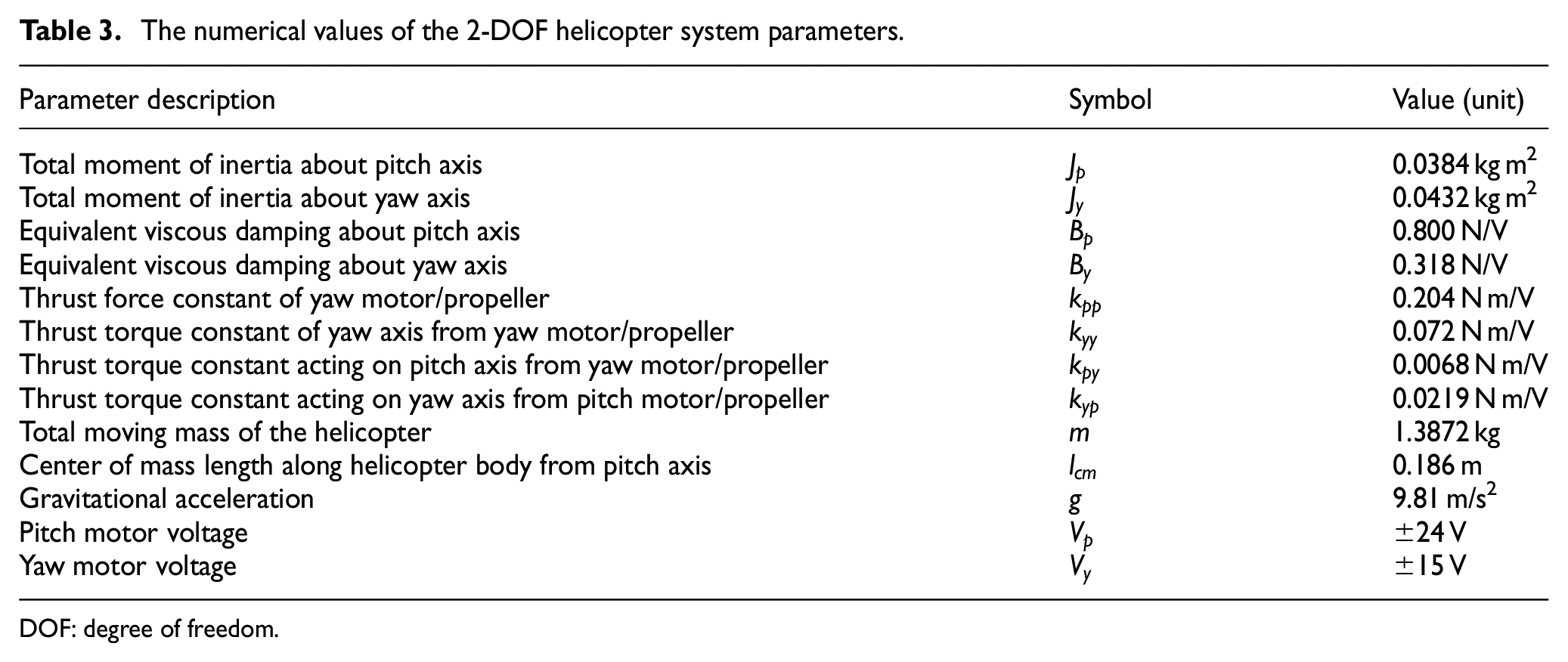
DOF: degree of freedom.
The initial values of variables θ,

The simulation results were launched by showing the behavior of the fitness function concerning the optimization iterations, as illustrated in Figure 3. The final value of the fitness function indicates the reaching of the optimal set of optimized parameters. The behavior of the fitness functions throughout the optimization process of the design parameters for the adaptive and classical controllers is described in Figure 3(a)–(d).
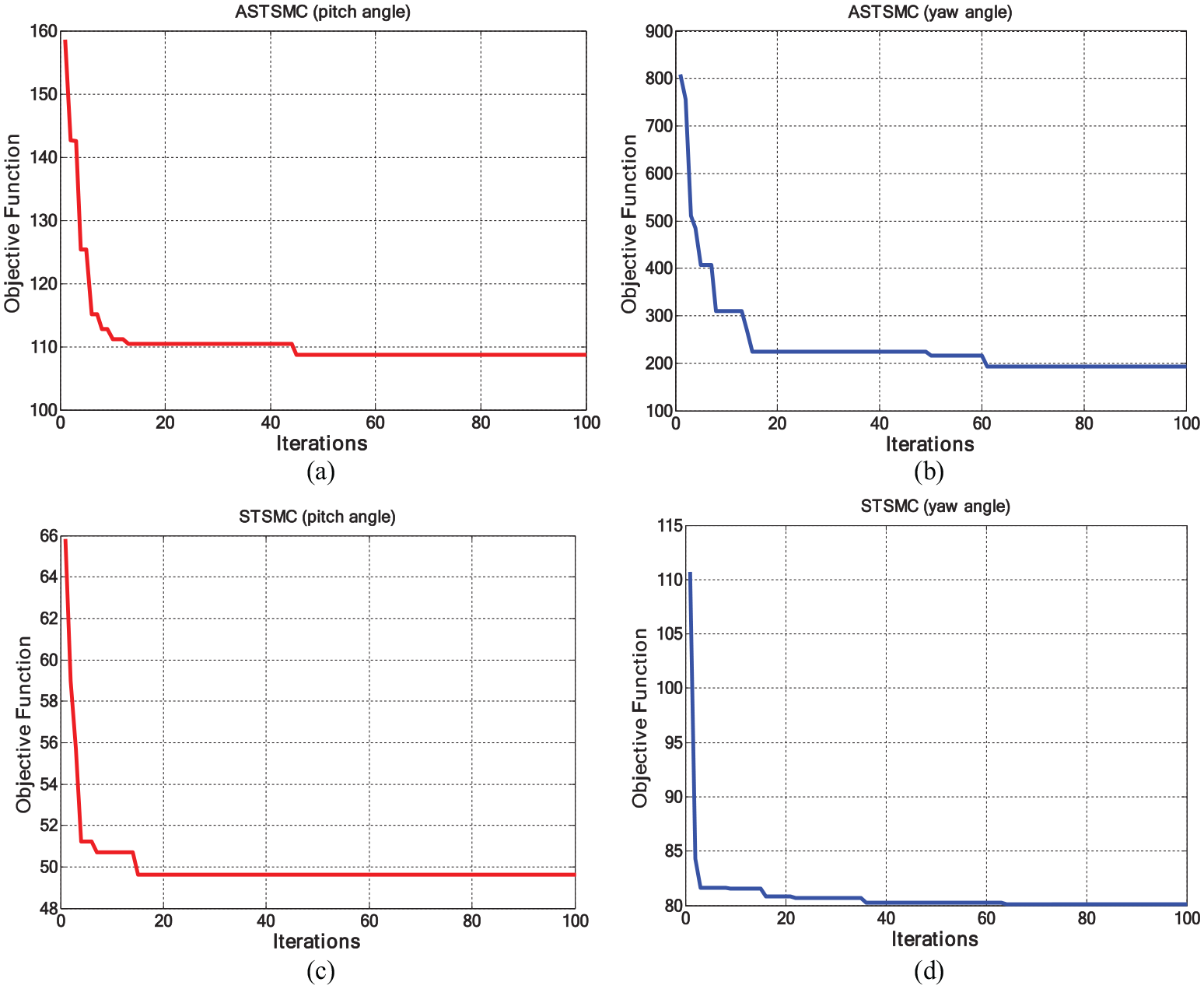
Evolution of the objective function versus the iterations: (a) adaptive super-twisting sliding mode controller (pitch angle), (b) adaptive super-twisting sliding mode controller (yaw angle), (c) super-twisting sliding mode controller (pitch angle) and (d) super-twisting sliding mode controller (yaw angle).
The behavior of the design parameters concerning the iteration of the optimization process is given in Figures 4 and 5. Figure 4(a)–(d) shows the behavior of the design parameters
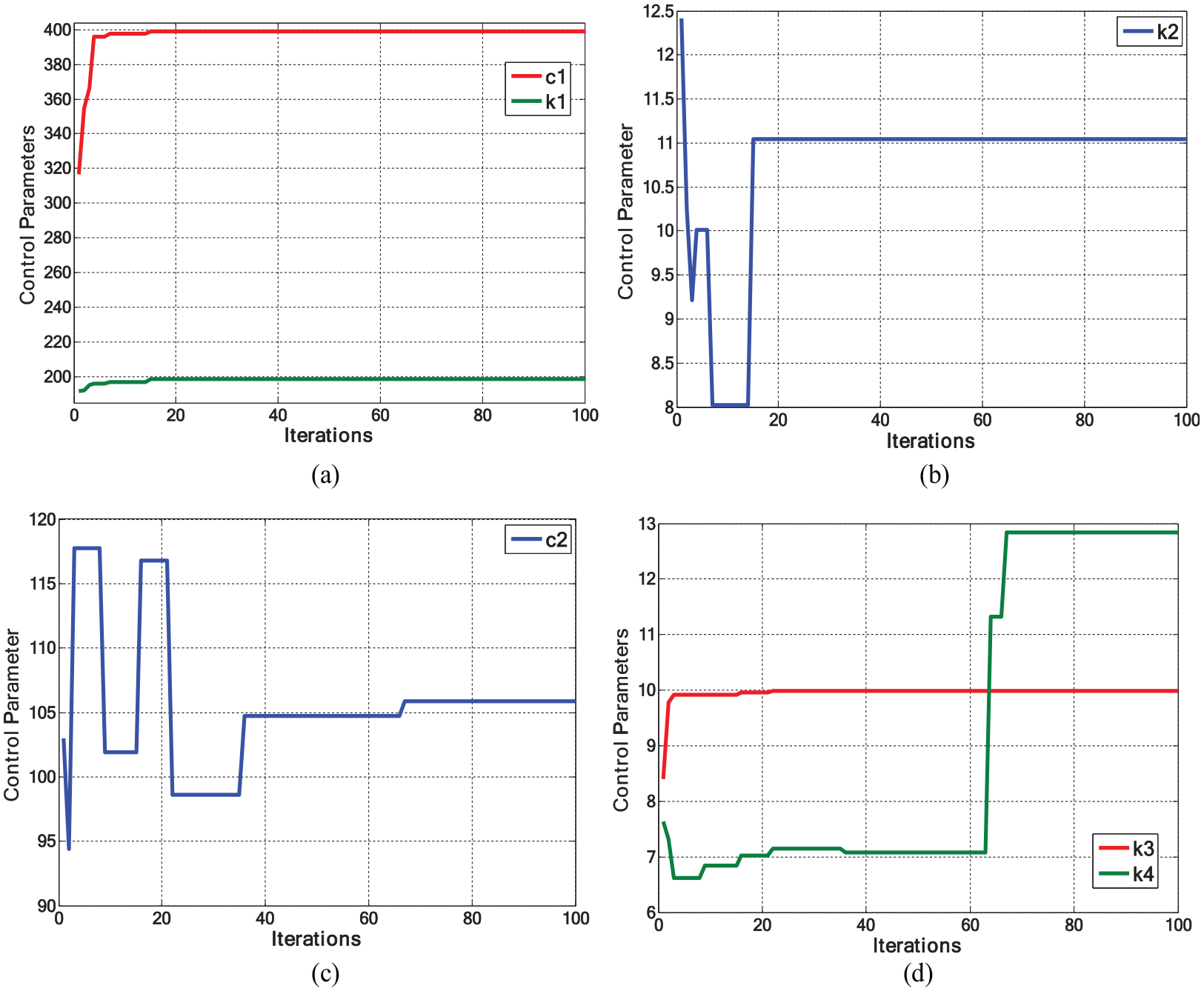
Evolution of the optimized parameters versus iterations: (a)
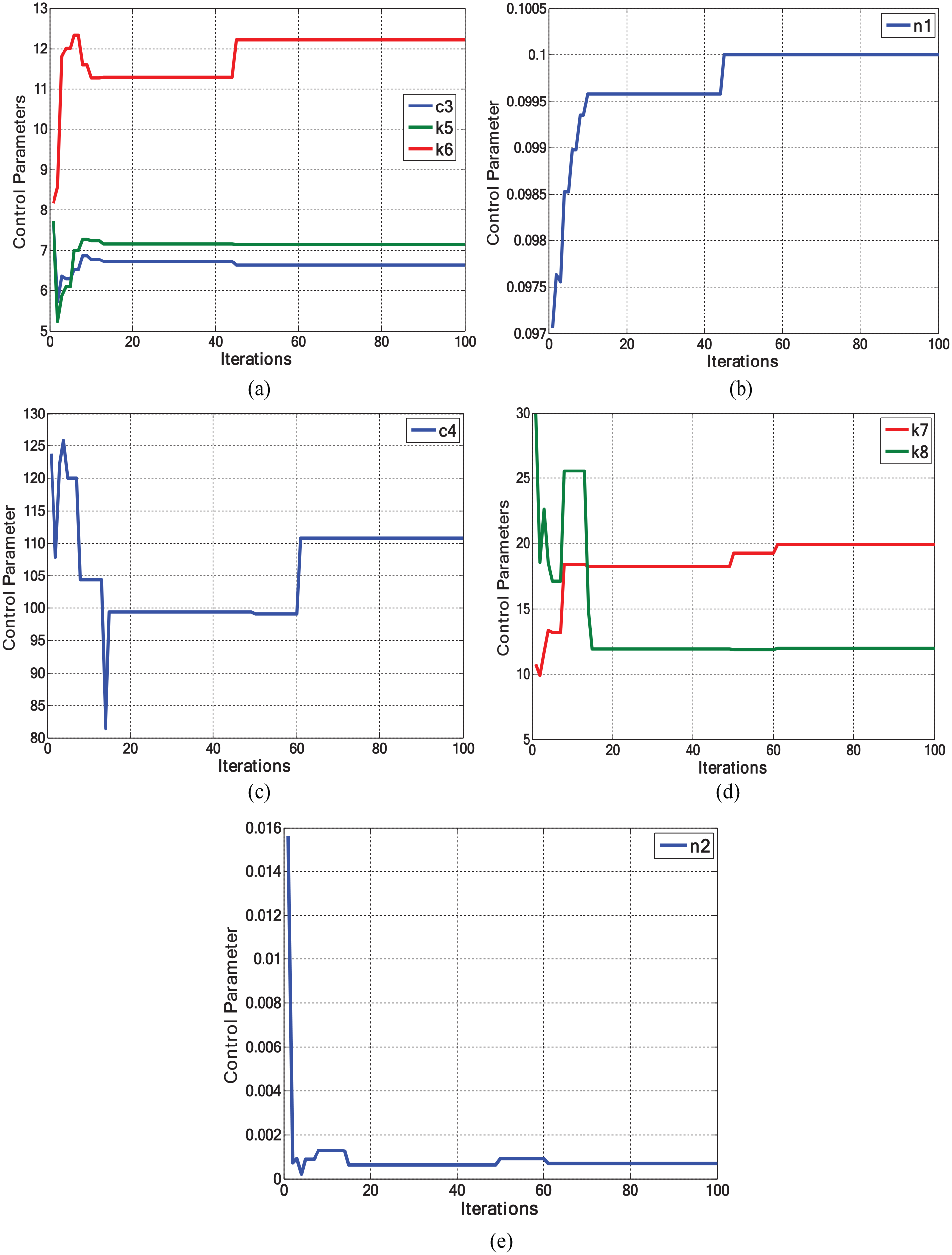
Evolution of the optimized parameters versus iterations: (a)
The dynamic response of the controlled system is shown in Figure 6. Figure 6(a) shows the response of pitch angle, Figure 6(b) shows the response of yaw angle, Figure 6(c) shows the response of angular velocity pitch angle and Figure 6(d) shows the response of angular velocity yaw angle, resulting from the conventional and adaptive super-twisting SMCs, in order to present the tracking performance of the 2-DOF helicopter system based on both of the super-twisting SMCs, with the same initial conditions. The corresponding control signals due to both controllers are shown in Figure 6(e) and (f). The performance of adaptive super-twisting sliding mode controller (ASTSMC) and super-twisting sliding mode controller (STSMC) is reported in Table 4. The performance evaluation is based on root mean square error (RMSE) and settling time. It is evident from the table that the adaptive super-twisting SMC has better dynamic characteristics for yaw angle signal than the conventional controller, while the pitch angle signal is on the contrary.
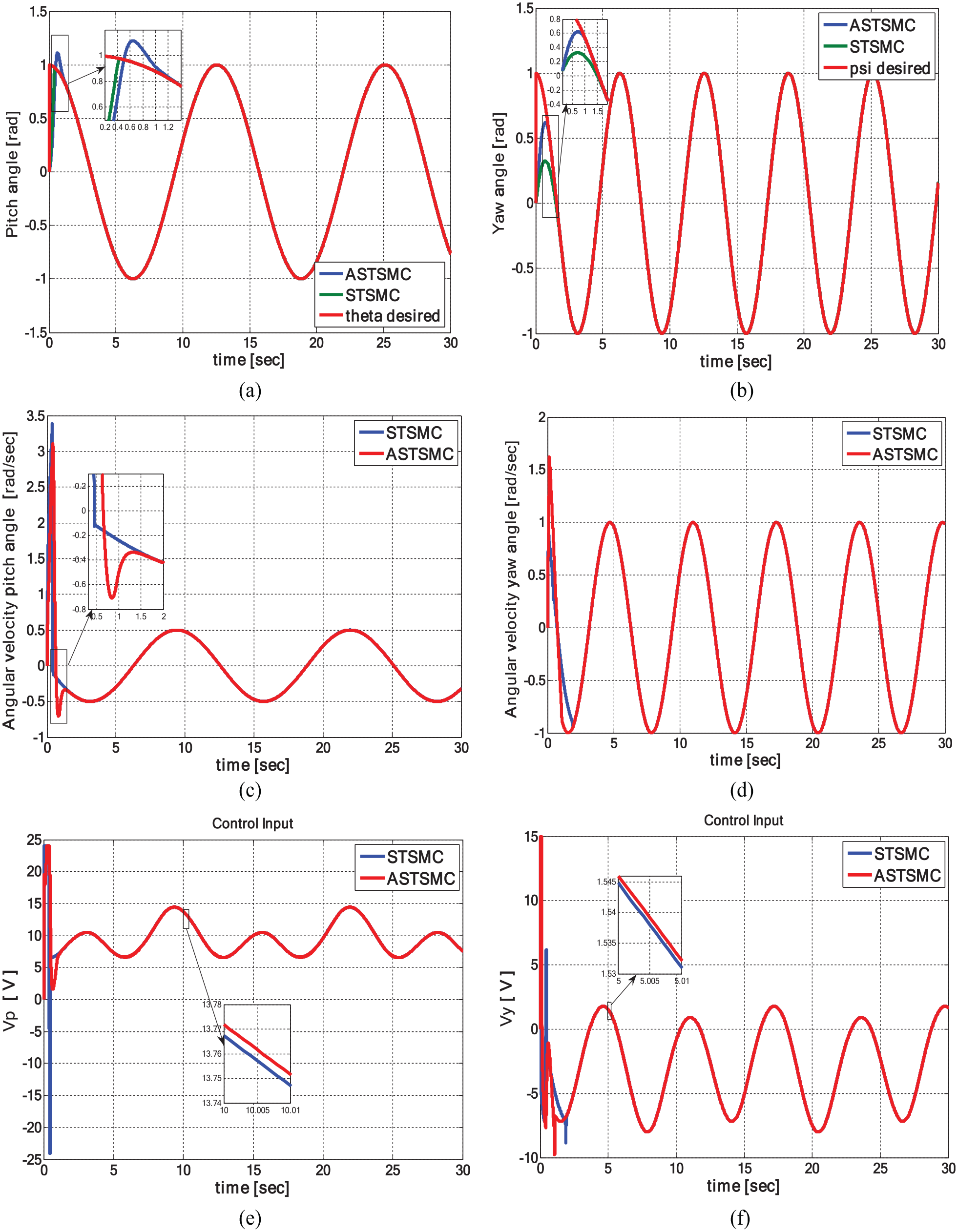
Dynamic responses of different state variables and control signals for the systems based on the adaptive and conventional super-twisting sliding mode controllers: (a) pitch angle, (b) yaw angle, (c) angular velocity pitch angle, (d) angular velocity yaw angle, (e) control signal
Tracking performance of the 2-DOF helicopter system based on the controllers.
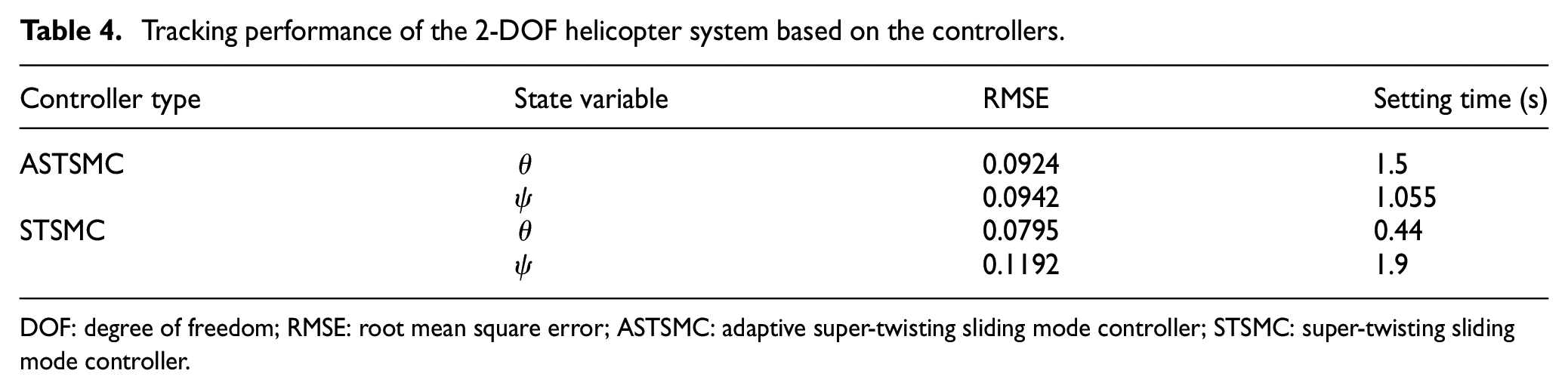
DOF: degree of freedom; RMSE: root mean square error; ASTSMC: adaptive super-twisting sliding mode controller; STSMC: super-twisting sliding mode controller.
Next, the uncertainty rejection capability was investigated by exerting increasing in the value of parameters (
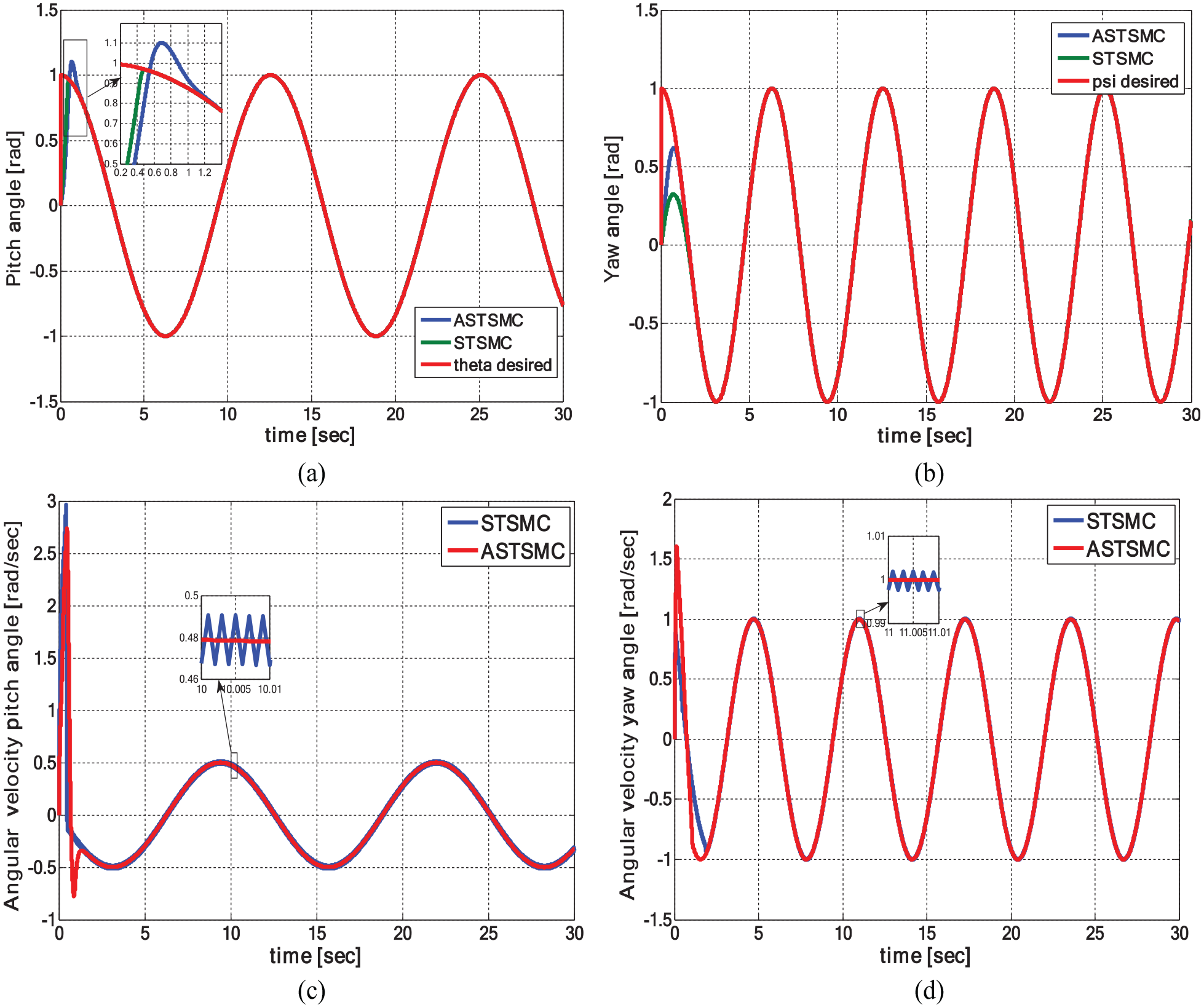
Dynamic responses of the (a) pitch angle, (b) yaw angle, (c) angular velocity pitch angle and (d) angular velocity yaw angle with the two controllers under model uncertainty.
The control signals due to both controllers are shown in Figure 8(a)–(d). In this figure, one can see the chattering phenomenon is still present in the response of control signal based on classical super-twisting SMC. However, much reduction of chattering has seen in the response of control signal based on adaptive super-twisting SMC. Therefore, a better enhancement in chattering has been made by the adaptive controller as opposed to the non-adaptive controller.
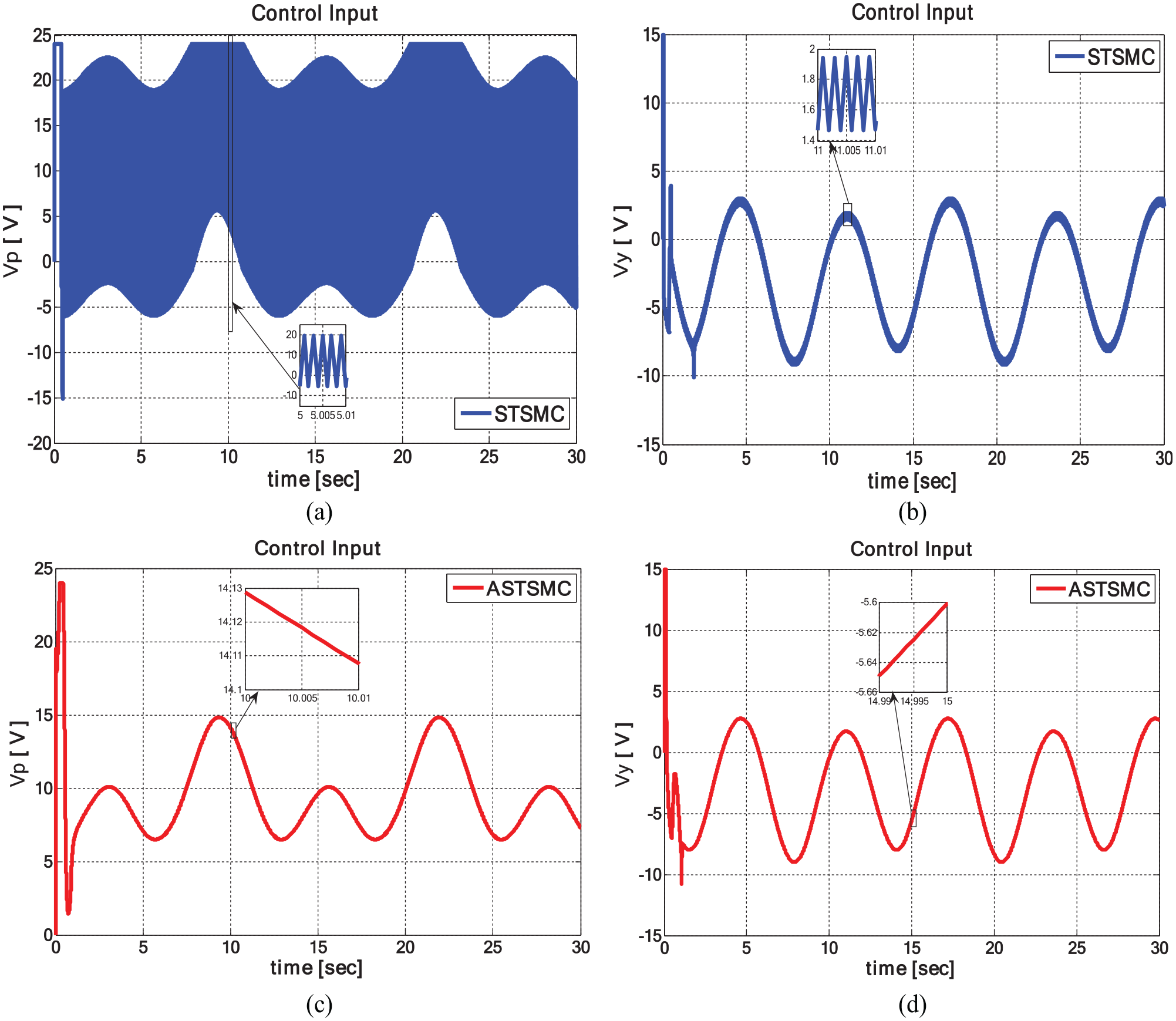
The corresponding control signals: (a) control signal
Figure 9(a) and (b) shows the estimation behaviors of parameters Bp and By, respectively. It is clear from the figure that there is a steady-state estimation error for both parameters and the estimation error may not reach zero as time tends to infinity. This can be attributed to the importance given to the zero convergence of system error over the estimation error in the stability analysis based on Lyapunov method. However, despite that the estimation error may not reach zero, this estimation error remain bounded as indicated in the figure. In turn, the bounded steady-state estimation error will prevent the gains Bp and By to increase without bound, which may lead to instability problems.
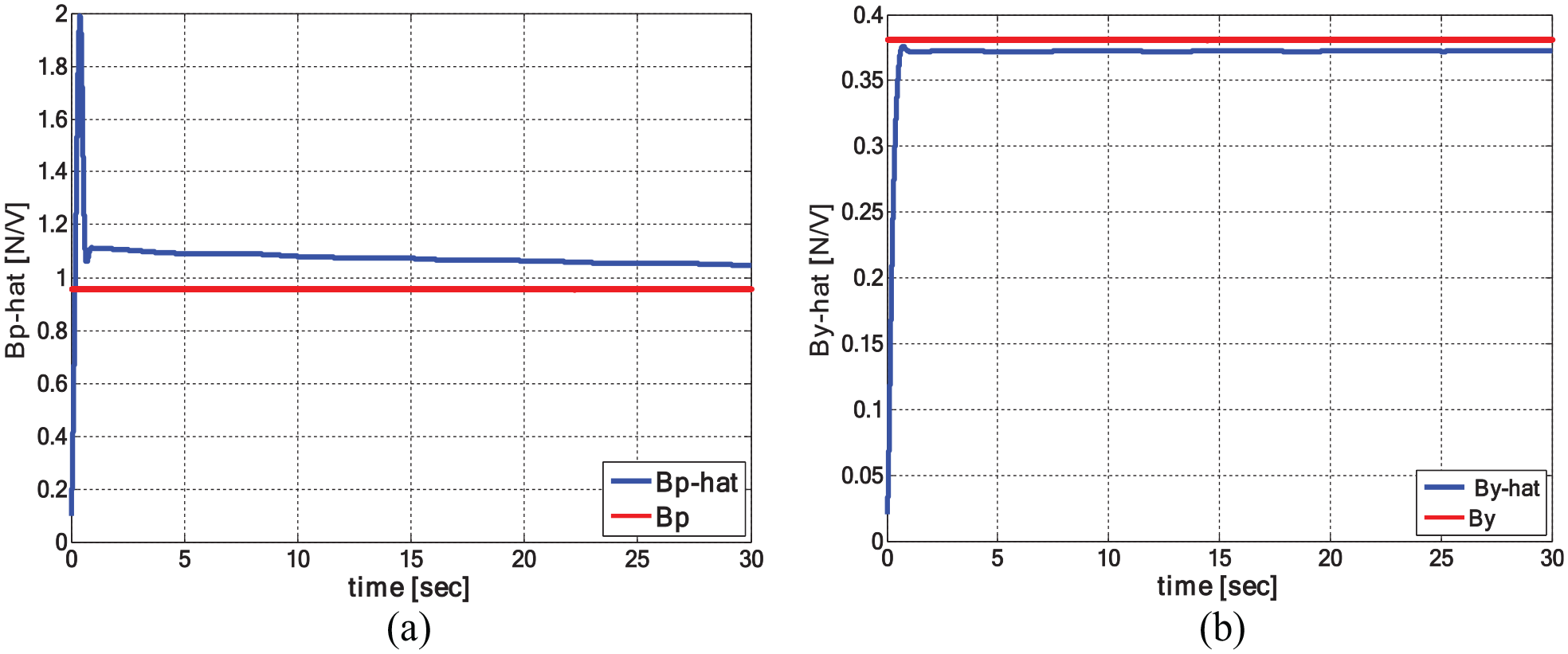
Model uncertainty estimation: (a) the estimation of parameter Bp and (b) the estimation of parameter By.
Conclusion
In this work, an adaptive super-twisting sliding mode control method is developed for the trajectory tracking and estimation of unknown parameters of 2-DOF helicopter. This method combines the advantages of high-order super-twisting sliding mode control and the adaptive control methodology. The stability analysis based on Lyapunov method is presented and the asymptotic convergence of systems and estimation errors is assured. The results based on computer simulation showed that the adaptive super-twisting SMC can not only ensure quick and precise trajectory tracking of 2-DOF helicopter, but also effectively reduce the chattering and make the control input smoother as compared to the controller resulting from classical super-twisting SMC.
It has been shown that from the simulated results, the adaptive super-twisting SMC has better robustness characteristics than the other controller. This is because that the adaptive super-twisting sliding mode could cope with the uncertainty in system parameters and hence it can better keep the dynamic performance of the nonlinear-controlled system unchanged in the presence of parameter variation than the non-adaptive version of super-twisting SMC. An improvement of dynamic response of 2-DOF system based on adaptive and non-adaptive super-twisting SMC is attained due to the inclusion of PSO algorithm to tune the design parameters of both control strategies to optimize ITAE performance index.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.