
Abstract
Quadrotor unmanned aerial vehicle is a nonlinear system of 6-degree-of-freedom motion. In order to handle the nonlinearity that causes undesirable behavior, robustness of flight control has been studied. In this work, we consider the combination of higher order sliding mode control and nonlinear time-varying sliding surface for robustness and accuracy in tracking. An adaptive super-twisting control, a second-order sliding mode control, is utilized to compensate for the uncertainty and perturbation of a quadrotor system. A time-varying sliding surface is designed with a nonlinear function to provide varying properties of closed-loop dynamics and to improve control performance with energy consumption reduction. The proposed control system performance including energy consumption was compared among nonlinear adaptive super-twisting control algorithm, linear adaptive super-twisting control algorithm, and linear super twisting controllers, without and under wind disturbance. The robustness and effectiveness of the proposed control system are demonstrated by several times simulation and experiment using a quadrotor helicopter test bed.
Keywords
Introduction
Quadrotor helicopter or quadcopter unmanned aerial vehicles (UAVs) have attracted research interest due to its wide range of applications such as navigation task (surveillance, mapping, rescuing, etc.)1–3 and recently physical interaction (environment and manipulation of object).4,5 However, the quadcopter requires robust control performance under aerodynamic forces, gyroscopic effect, variation of altitude, and wind payload and its resources and also the limited operational time due to power supply capacity. In reality, the characteristic of quadcopter dynamics is a nonlinear system and coupled; therefore, it requires a robust controller to compensate the uncertainties and external disturbances and also consider energy consumption. Most studies on reducing energy consumption for a quadcopter discuss the design of the quadcopter’s platform or mechanical parts. Another approach to reduced energy consumption is by changing only the control algorithm on the existing hardware, which is of low cost and shows higher efficiency. Therefore, the effect of a robust control algorithm for energy saving is addressed in this study.
A quadcopter has highly nonlinear and time-varying behavior because it is always influenced by unpredictable disturbances. In the conventional control approaches, feedback linearization 6 is developed which obtains the linear decoupled closed-loop system after a change of coordinates in the state–space. The requirement to measure all the states for this feedback controller is the most important limitation and it is vulnerable to parameter uncertainties. Sliding mode control (SMC) is used as a solution to deal with model uncertainties 7 because it provides perturbation rejection by designing boundary layer on sliding mode surface in the range of uncertainties/perturbation. 8 However, the boundary is difficult to estimate in most practical cases, therefore often leading to overestimation control, and also aggravates the chattering phenomenon which may decrease the tracking performance and increase energy loss. To overcome this weakness, an adaptive SMC was introduced for stabilizing the control system in altitude and attitude motion against the boundedness of uncertainty. 2 The idea of this adaptation algorithm is by increasing/decreasing the gain in order to adapt its magnitude to the perturbations and uncertainties in the sliding mode condition. Furthermore, it will force to increase the control gain to continue the adaptation process when the condition is not in the sliding mode. A backstepping and sliding mode controller was developed in simulation to control the position and attitude with an observer to know the bound fault of the system. 9
Another technique known as second-order sliding mode control (SOSMC) was introduced for chattering reduction.7,10 SOSMC has the main advantages of SMC and improves control performance with respect to chattering effects. SOSMC generates continuous control that drives the sliding variable and its derivative to zero in finite time. Among SOSMC, the super-twisting algorithm (STA) is a well-known controller which ensures robustness with respect to modeling errors and external disturbances because it contains a discontinuous function under the integral term and can reduce the chattering effect. 1 However, in practice, it is not easy to choose appropriate parameters of the STA for good control performance because the classical STA gain requires the bound of the disturbance as well as its time derivatives. To improve this weakness, adaptive super-twisting control algorithm (ASTA) was introduced without knowing bound of the disturbance and unmodeled dynamics, 11 and a modified STA was proposed by adding a linear stabilizing term to provide faster convergence to the sliding mode condition and robustness from any initial condition. 12 Multivariable STA was applied with neurofuzzy observer to estimate the bound of the uncertainty in SMC attitude of quadcopter in simulation. 13 However, all these SMC methods were conducted not in real-time application and not considering energy consumption.
The closed-loop dynamics in SMC 1 depends on the design of the stable sliding surface. To improve the performance in SMC, a fuzzy system strategy was utilized to update parameters of a sliding surface, 14 a time-varying sliding surface was considered, 15 and a variable damping ratio of closed-loop dynamics was applied to reduce high overshoot. 16 However, these methods will increase the computation time.
In addition, recent studies on disturbance rejection for a quadcopter have been developed for outdoor environment against wind gust. A controller based on active disturbance rejection was introduced to observe the presence of disturbance and maintain the position at a fixed point. 17 Another approach is using an adaptive observer with incremental nonlinear dynamic inversion, to counter the wind gust disturbance using a small quadcopter. 18 However, these methods are only verified in hovering motion and do not consider the energy consumption.
In this study, we propose a real-time robust control algorithm and a nonlinear sliding surface (NSS) 19 for a quadcopter in order to obtain robust tracking control and energy saving. The robust control algorithm is inspired from the ASTA 20 and is based on adaptive SOSMC and a modified STA that have a robust behavior to modeling errors, uncertainties, and perturbations with unknown bounds while having controller gain dynamically adapted. The control algorithm consists of the equivalent control part with a nonlinear function and an ASTA. The NSS is a function of tracking error, and it is designed to reduce the energy consumption of quadcopter during the flight. We verify the effectiveness and control performance of a quadrotor by simulation and experiment. In addition, we show the control signals in order to verify the chattering reduction that relates to reduce energy consumption. In order to verify the repeatability of the proposed controller’s performance and ensure the fair comparison with conventional controllers, we conducted repeated experiments in an indoor environment with an artificial wind disturbance. This article is an extension to the work in a conference paper. 21 Differences include the following: (1) an indoor experiment based on a rigid link quadcopter to demonstrate the performance without and under wind disturbance, (2) the stability proof of the designed controller using the Lyapunov stability theory, (3) demonstration with desired trajectory x-y-z motion simultaneously with disturbances in the simulation, and (4) energy consumption evaluation.
Dynamics model of quadrotor helicopter
A quadcopter consists of two pairs of contrarotating rotors, one pair (M2 and M4) rotates clockwise and the other (M1 and M3) counterclockwise, as shown in Figure 1. The changing altitude of the quadcopter is managed by rotating all rotors. The rotation body along z-axis (yaw motion) is generated by managing the differences of clockwise and counterclockwise rotor speeds simultaneously. The rotation body along x- and y-axes (pitch and roll motion) is achieved by controlling speed of clockwise rotor and counterclockwise rotor that will generate forward, backward, left, and right motions.

Quadrotor model.
A rigid 6-degree-of-freedom (DOF) body of quadcopter will operate considering in two model frames as shown in Figure 1. A body frame {B} is fixed at the quadcopter’s center of gravity, in which the rotor axes point to positive z-axis and the two arms point to x- and y-axes. An earth/inertial frame {E} is a rigid body with respect to the ground. In {E}, we describe the quadcopter’s position and orientation as

where

R is a rotational matrix derived from ZXY Euler angle of yaw, pitch, and roll; H is a transformation matrix from angular velocity {B} to {E}; and s and c represent sine and cosine, respectively.
The Newton–Euler approach in {B} is utilized to obtain the system dynamics of quadcopter for translational and rotational motion. For controller design, the dynamics will be represented in {E}. The dynamics of quadcopter is described as follows

where


Input
The gyroscopic and aerodynamic effects are not included in quadrotor model but it is considered as a disturbance term. In addition, four rotors have limits for speed and torque, and thus the control inputs have minimum and maximum values in operation.
Control system design
In this section, we present the control scheme for the quadcopter which is a 6-DOF underactuated system with four control inputs. The system dynamics is changed into a decoupled system by transforming four control inputs, u, into six new synthetic inputs, v, in order to obtain a linear form. Then, the new input v is transformed into original control input u, desired attitude
In addition, the control of pitch and roll angles is quite sensitive and the discontinuous control law could bring unstable behavior of the system. It can reduce the interest to use robust discontinuous control laws like the first-order SMC. The second-order sliding mode controller is an attractive approach to avoid discontinuity. In addition, the proposed controller adaptively limits the magnitude of the control input and then the chattering. The STA also limits the essential discontinuous behavior of the control input which does not use the time derivative of the sliding variable as the standard second-order SMC.
Control system structure
To simplify controller design, we transform the system dynamics in equation (1) into a decoupled system like in the work by Sumantri et al., 22 and we consider the virtual input

Hence, the decoupled system in equation (1) considering equation (2) is rewritten into a linear state form as follows

where
From the new definition virtual input vector in equation (3), considering equation (2), we obtain two sets of equations: translation and rotational dynamics. For translational dynamics, we have

For rotational dynamics, we have

Substituting the attitude variables into desired attitude variables in equation (4), we can calculate desired pitch and roll angles

To obtain the original inputs

The inputs

The above control strategy is summarized in Figure 2 and described as follows:
Step 1. Desired trajectory of
Step 2. The attitude controller which is explained in the following section handles the attitude tracking error between current angular states
Step 3. The virtual input vector
In the following section, the calculation of v is explained as one vector. However, all the calculations are decoupled into each DOF so that the sequential calculations in Figure 2 are possible.

Control system structure.
Design of nonlinear sliding surface
We apply SMC for the calculation of virtual input v for achieving the robust control performance. Using an NSS function, the damping ratio of the closed loop system is changed from its initial low value to a final high value as the output approaches the desired trajectory. The nonlinear sliding surface equation for the dynamics in equation (3) is designed as follows 16

where

where
The nonlinear function,
To derive the SMC law achieving

Equations (3) and (11) lead to

Then, we choose a control law v which consists of equivalent control

where

Here, we assume that the desired accelerations of pitch and roll motion are zero to avoid second derivative calculation of equation (6) in implementation.
Design of adaptive super-twisting control
In this study, we consider the STA that is an extension of previous control algorithm
10
with a constant plus proportional and power rate reaching law to include an extra linear correction term, which ensures finite-time convergence of sliding variable for broader class of uncertainties. It provides stronger robustness and faster convergence speed.
24
It also has an important feature which is directly applicable to systems with relative degree 1 and without measuring derivative of sliding variable

where

are the nonlinear stabilizing terms and
Generally, gains of

where
The second line of adaptation law is used to ensure that the gains are always positive. We may consider to tune
The overall closed-loop dynamics is obtained by substituting equation (13) into equation (3) and considering equation (9) as follows

Implementation and evaluation
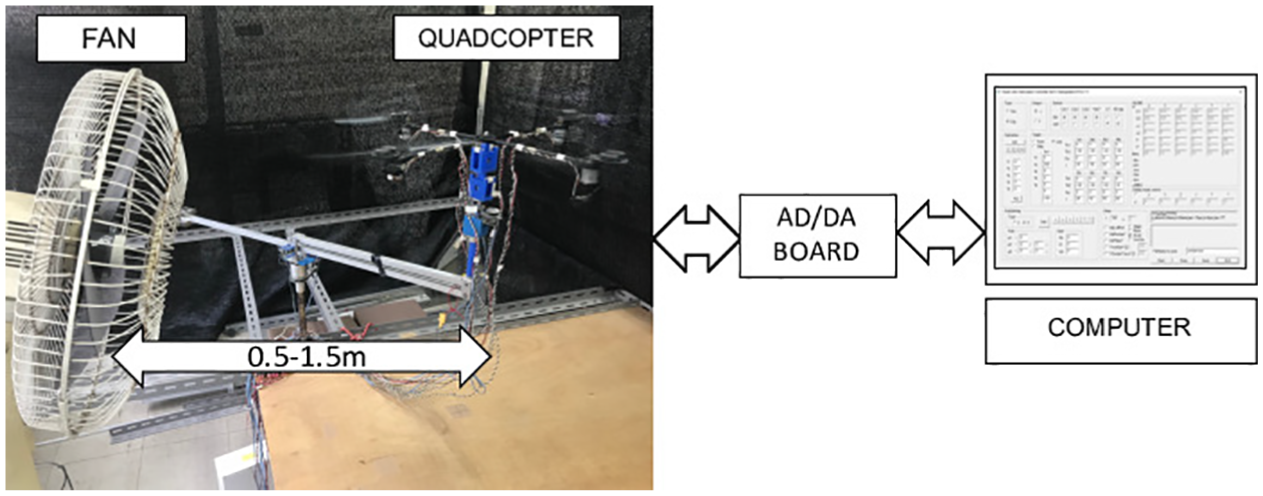
In this section, we examine the effectiveness and robustness of the proposed controller design, by comparative results with STA and ASTA controllers in numerical and experimental tests without and under disturbance. In the experimental test, we use a quadrotor experimental test bed as shown in Figure 3. This test bed was built to verify the repeatability by maintaining the same experimental condition. The parameters in equation (1) for these numerical and experimental tests are obtained from previous work
19
as follows:

Experimental system configuration.
Simulation results
Simulation results of the proposed controller for trajectory tracking are illustrated in this section in order to evaluate the robustness of the control performance with sampling time 0.005 s. The desired trajectory in Figure 4 consists of the following four different motions (total 60 s): (1) take-off motion from A to B (0–25 s) with the height of 0.1 m, (2) maneuvering in the
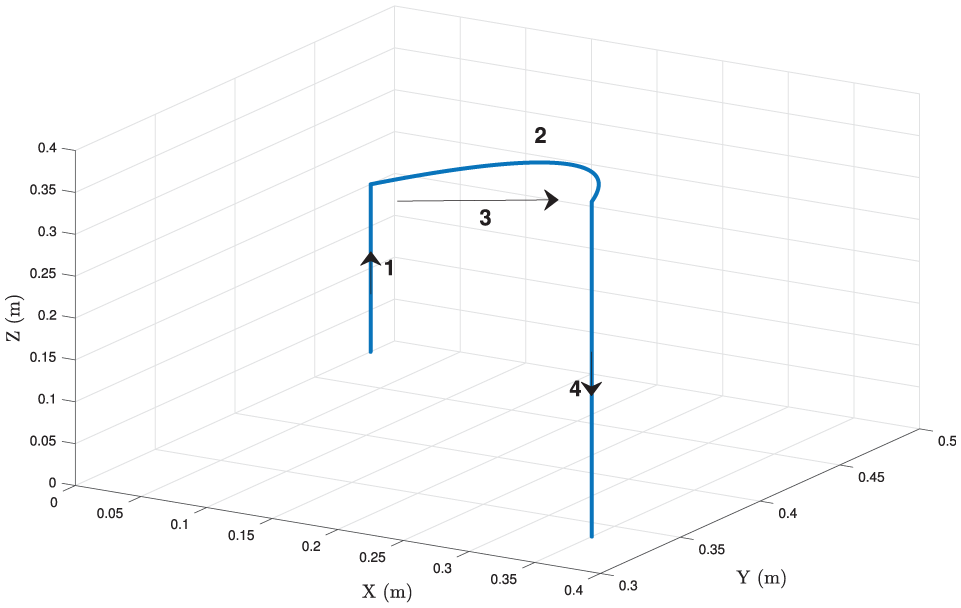
The 3D desired trajectory in simulation.
In this study, we demonstrate the simulation with different parameters from the previous work
21
by considering disturbances. The same tuning parameters are chosen for fair comparison including NSS parameters and initial parameters for adaptation (units are omitted):
The ASTA with NSS (ASTAN) achieves smaller tracking position error in Figure 5, which reduces the mean and variance of the tracking position error by 33% without disturbance and 26.8% under disturbance on the average. Figure 6 shows the control performances of these controllers. The control input
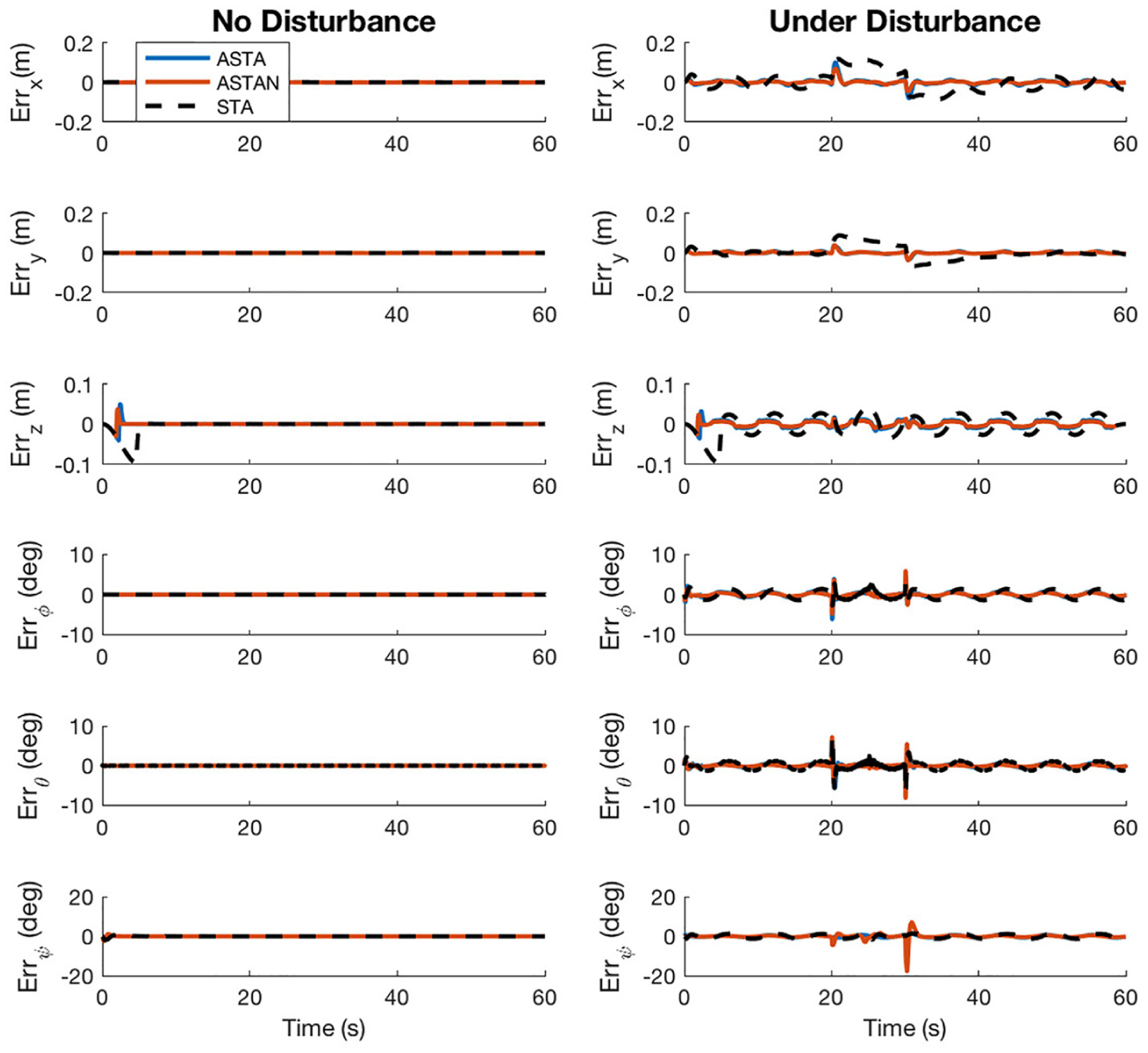
Tracking error results in simulation.

Control input profiles in simulation.

Results of adaptive gain
The root-mean-square error (RMSE) and the standard deviation (SD) for all methods are summarized in Table 1, which shows that the ASTAN performs better than ASTA. In addition, it is verified that the adaptive mechanism is also effective for ASTAN case without and under disturbance. The variance of control input for these methods is summarized in Table 2, which shows that the ASTAN is also effective to reduce the chattering of the system very well.
Tracking error comparison results in simulation.

ASTA: adaptive super-twisting control algorithm; ASTAN: ASTA with nonlinear sliding surface; RMSE: root-mean-square error; SD: standard deviation; STA: super-twisting algorithm.
Control input variance comparison results in simulation.

ASTA: adaptive super-twisting control algorithm; ASTAN: ASTA with nonlinear sliding surface; STA: super-twisting algorithm.
Experimental results
Experimental results of the proposed controller for trajectory tracking and stabilization are illustrated in this section. Figure 8 is a desired trajectory in experiment, which consists of six motions during 60 s as follows: (1) take-off motion from A to B (0–10 s), (2) perform yaw motion and maneuvering in the x–y plane from B to C (10–15 s), (3) hovering at C (15–30 s), (4) maneuvering from C to B (30–34 s), (5) hovering at B (34–50 s), and (6) landing from B to A (50–60 s). We applied wind disturbance from an electric fan (power: 57 W) to verify the robustness of the proposed method with distance 0.5–1.5 m, as shown in Figure 3. The disturbance magnitude is proportional to the distance between the quadcopter and the fan. The variable disturbance conditions are considered along the trajectory from B to C and C to B, where it takes the maximum at C. With the position and direction of the fan are fixed, it generates different air flow directions to the motion of quadcopter from B to C and C to B. Therefore, we may evaluate the effectiveness of the proposed controller design under variable magnitudes and directions of the wind disturbance. The environment in experimental test bed includes dynamics uncertainties and perturbation different from simulation. We obtain the controller parameters by several experiments as follows (units are omitted):

The 3D desired trajectory in experiment.
Control performance evaluation
The tracking error resulting from three control strategies in the experiments without/under wind disturbance is shown in Figure 9. It shows that both control strategies provide robustness in experiments without/under wind disturbance. Generally, the larger error occurs in hovering motion after maneuvering motion. Under wind disturbance, all states have large magnitude error than without wind disturbance. During the hovering motion, the pitch motion exhibits larger error results than the other state motions because it is largely affected by wind disturbance. From Table 3, we conclude that the ASTAN provides the smallest tracking errors than the others in all conditions. The repeatability of these controllers is also evaluated by performing five-times experiments and the results are illustrated in Figures 10 and 11. On average, the ASTAN provides around 2% and 3.5% smaller mean value than that by ASTA and STA in both conditions without/under wind disturbance and has around 1.5% and 5% smaller variance in the condition without wind disturbance. Figure 12 shows the control performance in each trajectory condition in Figure 8. On average, the ASTAN provides more effectiveness for maneuvering and hovering without wind disturbance.

Tracking error profiles in experiment.
Tracking error comparison results in experiment.

ASTA: adaptive super-twisting control algorithm; ASTAN: ASTA with nonlinear sliding surface; RMSE: root-mean-square error; SD: standard deviation; STA: super-twisting algorithm.

Comparison of root mean square and variance of tracking errors without wind diturbance.
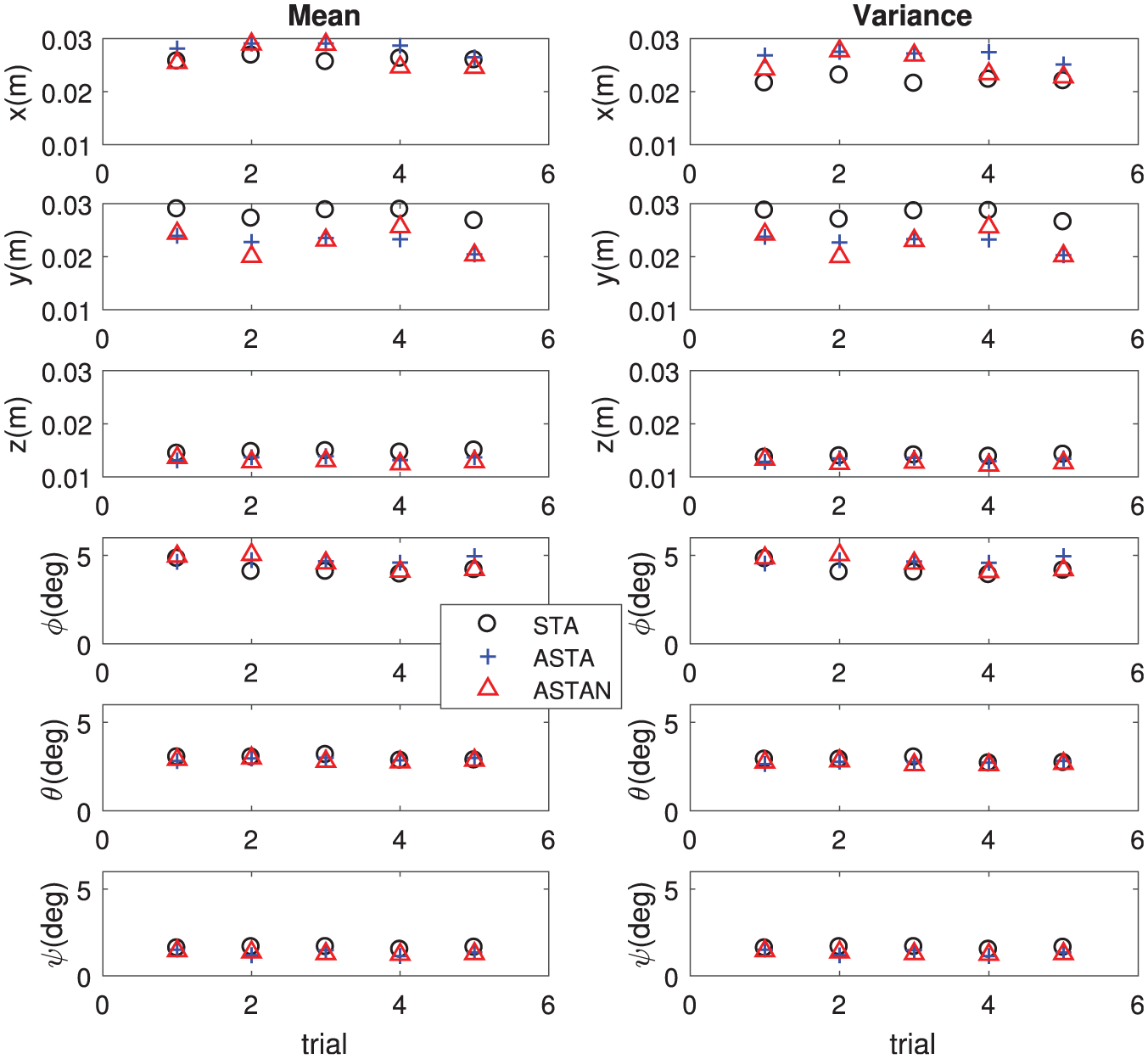
Comparison of root mean square and variance of tracking errors under wind disturbance.

Comparison of root mean square and variance of tracking errors in six trajectory conditions.
Figure 13 shows control input profiles. It is seen that the control input
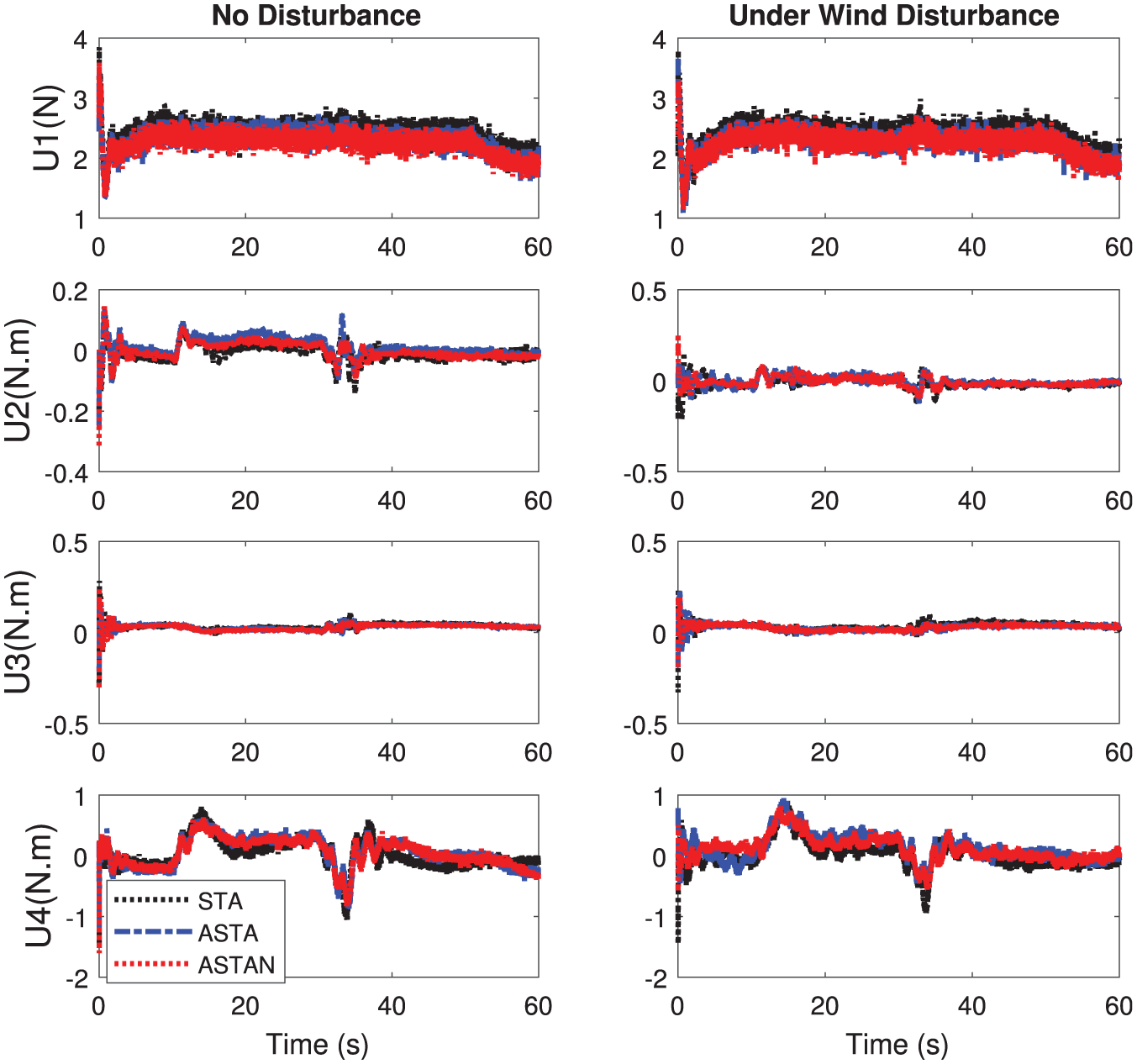
Control input profiles.

Control input variance in five-times experiment.

Control input variance in six trajectory conditions.
Control input variance comparison results in experiment.

ASTA: adaptive super-twisting control algorithm; ASTAN: ASTA with nonlinear sliding surface; STA: super-twisting algorithm.
We use the voltage formula and power measurement for each motor which are obtained from the work by Sumantri et al.
22
including how to calculate power of each motor from control inputs
The total energy consumed in each actuator is calculated by integrating its electric power during motion. The effect of chattering evaluation on energy consumption for five-times experiments in the conditions without/under wind disturbance is shown in Figure 16 and Table 5. It can be seen that the ASTAN is more effective to reduce energy consumption in both conditions. The ASTAN can reduce energy about 3% and 5% than with ASTA and STA without disturbance and also 1.4% and 3.3% under wind disturbance.
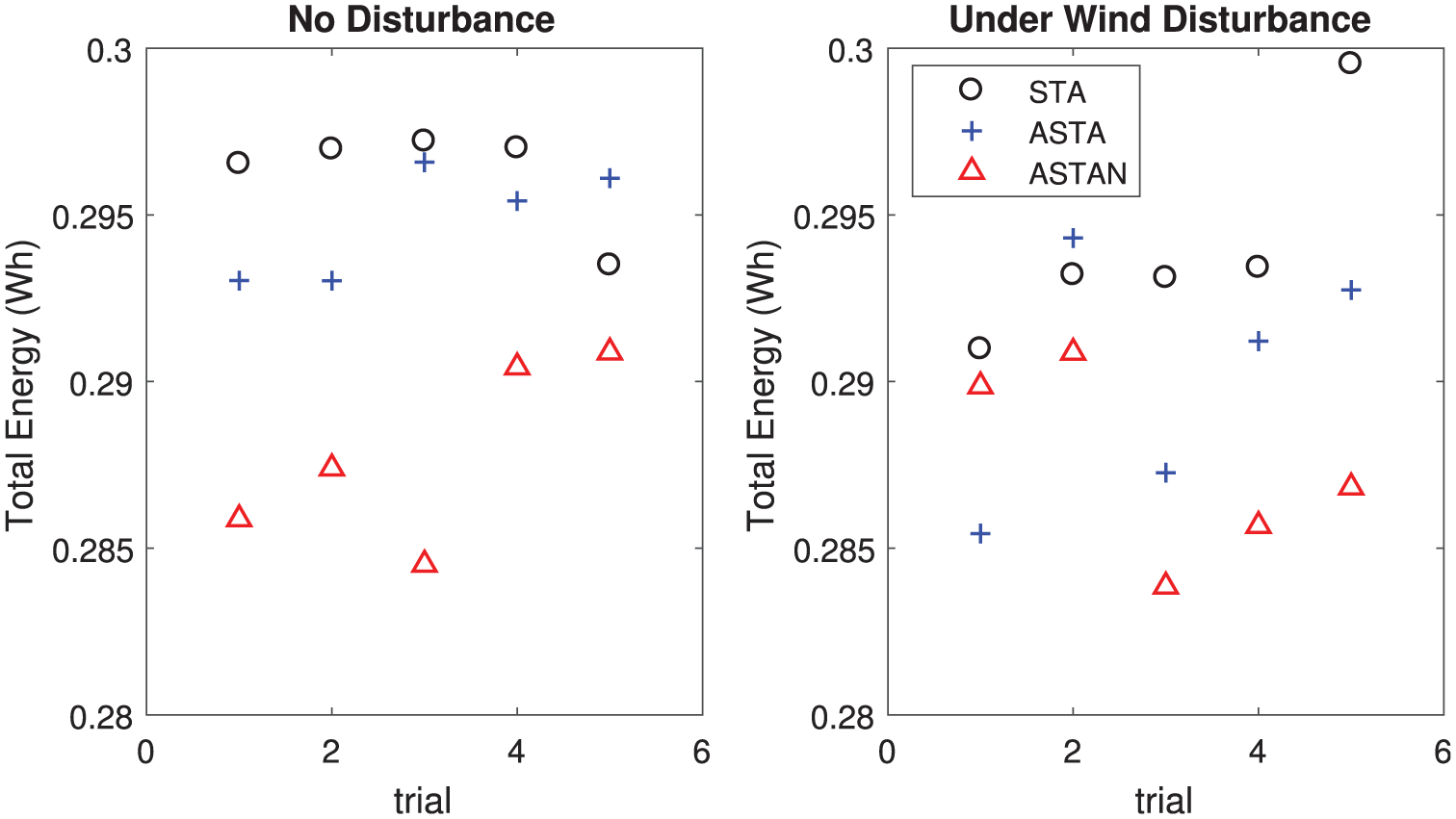
Total energy consumed in actuators in five-times experiment.
Total energy comparison results in experiment.
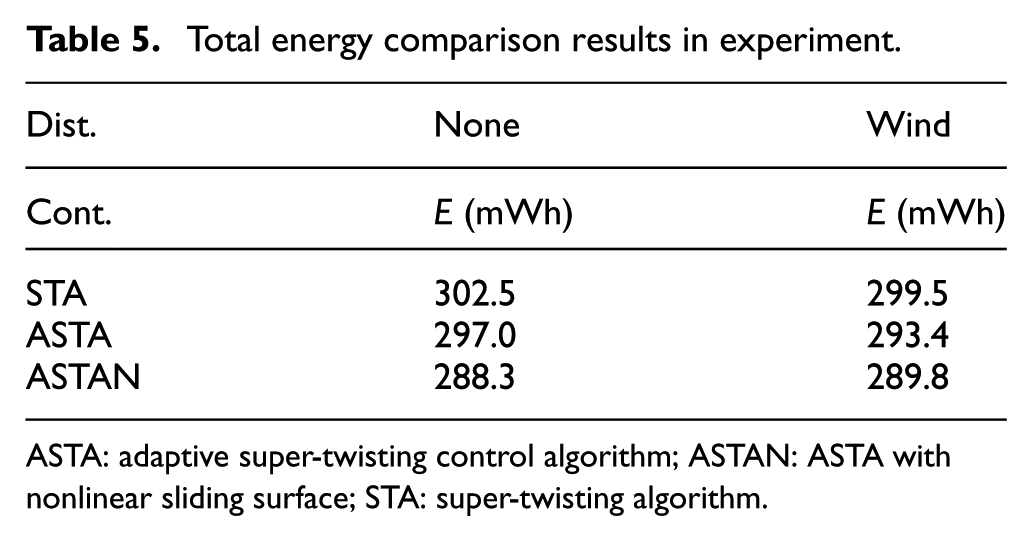
ASTA: adaptive super-twisting control algorithm; ASTAN: ASTA with nonlinear sliding surface; STA: super-twisting algorithm.
In addition, we extend the evaluation in order to obtain information of energy consumption in six trials during operational flight, which is shown in Figures 17 and 18. Figure 17 describes average energy consumption for each motion in which the hovering motion consumed less energy than others. Figure 18 describes energy consumption for several experiment in each motion, and ASTAN has less energy consumption significantly for a case without disturbance. However, under wind disturbance, while there is no significant difference energy consumption, ASTAN has less energy consumption on average during hovering motion.

Total energy consumed in actuators for each trajectory condition.
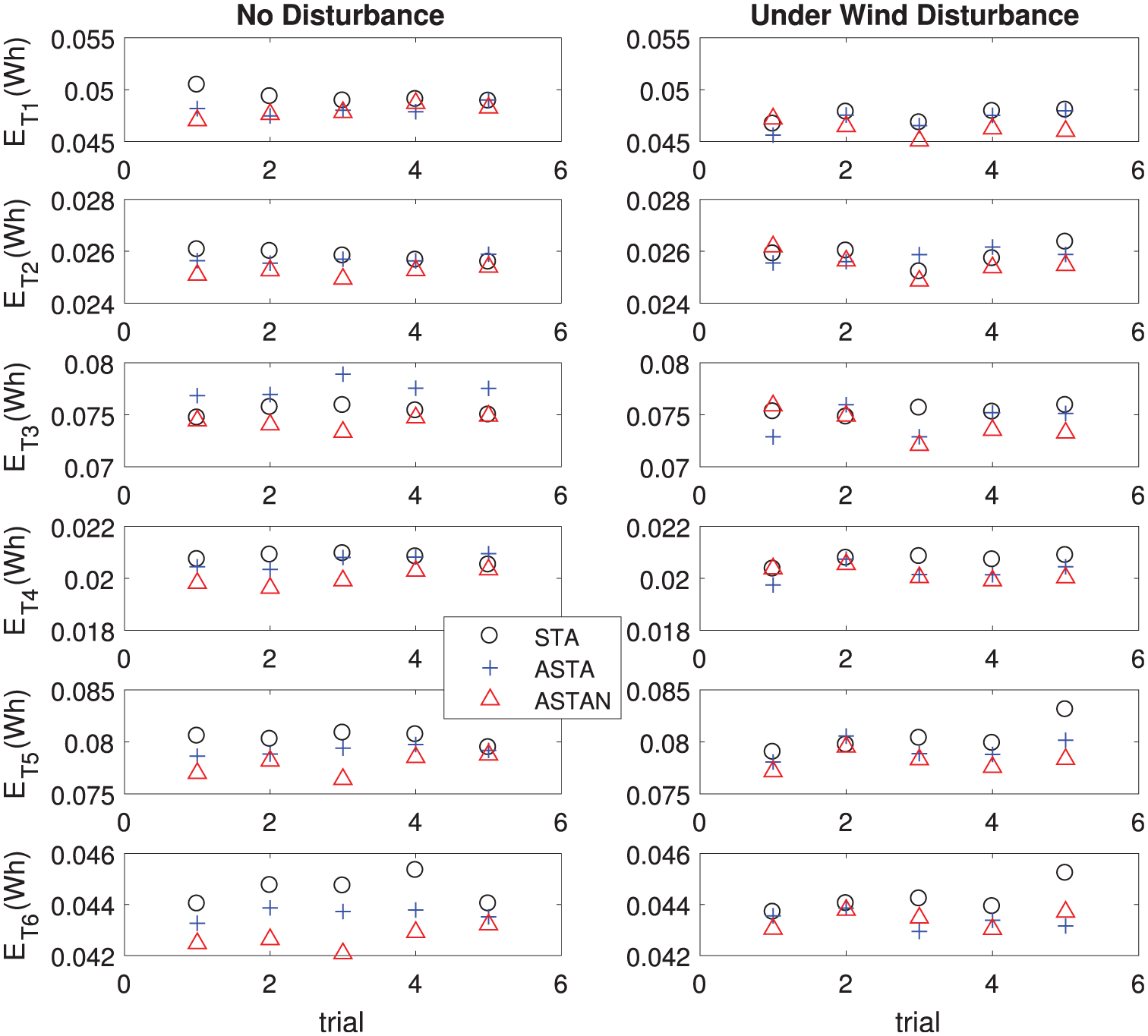
Total energy consumed in actuators for six trajectory conditions (
Conclusion
In this article, we design an ASTAN for trajectory tracking of a quadrotor system. Because the parameter adjustment of NSS is sensitive, adaptation mechanism is included based on the Lyapunov stability theory. The designed ASTAN has been verified by comparative simulation and experiments with conventional STA and ASTA. It maintains stability to external disturbances and provides smaller tracking errors. In experiments, the proposed ASTAN provides better performance compared to ASTA and STA in which the average mean of tracking error is reduced by 2% and 3.5% in both conditions (cm), and 1% and 32% without disturbance (°) and 1.5% and 17.3% under wind disturbance (°); the variance of tracking error is reduced by 1.5% and 5% without wind disturbance (cm) and 1.5% and 2.8% under wind disturbance (cm), and 1% and 30% without disturbance (°) and 1.5% and 17.5% under wind disturbance, and is also effective to reduce the energy consumption by 3% and 5% without wind disturbance and 1.4% and 3.3% under wind disturbance, respectively. In future work, we will include unmatched disturbance rejection and conduct outdoor experiment with the proposed control method.
Footnotes
Appendix 1
Handling Editor: Parvathy Rajendran
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.