
Abstract
In the past decade, many approaches that attempted to solve the problem of optimal control and parameter estimation of an unmanned aerial vehicle with a priori uncertain parameters simply implied two ways to solve such problem. First, by the formation of optimal control based on a refined mathematical model of the unmanned aerial vehicle, and second, by using the estimation and identification methods of the model parameter of the unmanned aerial vehicle based on measured data from flight tests. However, the identification of the dynamic parameters of the unmanned aerial vehicle is a complicated task because of a number of factors such as random vibration noise, disturbance, and uncertainty of the sensor measurements. Due to the influence of random vibration noise, the problem of correlated vibration noises and uncertainty has encountered inevitably, and the accuracy of the state estimation for unmanned aerial vehicle is degraded. This study concentrates on the optimal control and state estimation for the unmanned aerial vehicle under the combination of both random vibration noise and uncertainty collected by the sensors. The effects of random vibrations at various stages of a large-scale flight that are a priori uncertain require the inclusion of identification algorithms in the optimal control loop. The results showed that the method used in the analysis had been able to provide accurate estimations.
Introduction
The mathematical model of the unmanned aerial vehicle (UAV) is a set of equations of the ideal work of the UAV, which cannot be accurately produced in real conditions, due to the influence of random external parameters on the UAV. 1 Consequently, the response of subsystems (sensors, actuator, controller, etc.) of the UAV will produce parameters with values that differ from their theoretical values. 2 The main sources of uncertainties of the UAV during operation mode depend on various external factors such as atmospheric disturbances, vibrations noise, inaccuracy of coordinate transformations, and missing measurements. 3 However, the external factors affecting the uncertainties can be represented by a set of stochastic differential equations in the Cauchy form.
Because of the positive correlation between vibration noise and uncertainty, it can be mentioned that minimizing the vibration noise will greatly contribute to the reduction of the uncertainty. Hence, the mathematical model of controlling UAV parameters must consider the effect of both factors.
Most researches considered the problem of uncertainty in the UAV systems as a linear noise.4,5 This consideration often suffered of performance degradation once the flight condition of the UAV diverges from hovering. However, to overcome the challenges of controlling the UAV parameters under uncertainty, vibrations, and disturbances, a number of diverse approaches have been proposed.
Paw et al. 6 presented a systematic procedure of uncertainty modeling by linearizing the nonlinear uncertainties. Conde et al. presented a method based on particle filters to predict trajectories of UAVs under uncertainties. The particle filter is able to cope with the influence of different sources of uncertainty such as the atmospheric conditions. 7 Alexis et al. 8 presented a switching model predictive attitude controller for an unmanned quadrotor helicopter subjected to atmospheric disturbances.
However, Yang et al. 9 suggested a study that proposed a new attitude-control approach for an UAV using the variable structure control theory with a particular focus on the parameter uncertainty and external disturbance. Relatedly, Al-Sabban et al. 10 presented the Markov decision processes for planning drone flights under uncertain wind direction conditions, in which time-varying wind was considered. Moreover, Xu et al. 11 suggested a quantitative feedback theory-based robust design approach by considering the model quadrotor dynamics as a set of linear models with parameter uncertainties. Then, Jaeger et al. presented a procedure for reliable and robust optimization of an aircraft at the conceptual design phase. Uncertainties on model and design variables are taken into account in a probabilistic setting. 12 Warsi et al. 13 presented a control algorithm for fixed-wing UAV longitude and latitude angles (yaw, pitch, and roll) controlling under uncertainty and perturbed condition. Islam et al. 14 proposed a study for the stability and the problem of tracking control of a quadrotor UAV in the presence of modeling error and disturbance uncertainty. Xiong and Zhang 15 presented the sliding mode control for a quadrotor UAV with parameter uncertainties. Hervas et al. suggested the control of fixed-wing UAVs in the presence of stochastic winds. A nonlinear controller was designed based on a full nonlinear mathematical model that includes the stochastic wind effects. 16 Ren et al. 17 presented in their study a command filter-based back-stepping controller for robust height and attitude tracking for small unmanned helicopter with flapping dynamics under uncertainties and external disturbances. Jafari and Xu 18 proposed a research that consists of the design of an adaptive intelligent control strategy, which is effective for the real-time autonomous flight of a UAV, even under the system uncertainties and disturbances. Finally, Kim et al. 19 presented a robust optimization approach to find the optimal flight schedule in the flight network considering uncertain battery duration.
Many researches related to the control parameters of the UAV have reported experimental data suggesting approximate functions to the vibration noise or to the uncertainty.20–23
Although the effect of uncertainties has been investigated by several researchers, the effect of both vibration noise and uncertainties on the UAV control parameters has not been well addressed.
According to the literature review of this study, some of the problems can be summarized as follows:
The optimal control performed for the UAV in some researches, but the optimal controller is linear, rather than nonlinear;
The control design did not accommodate the coupling in the dynamics;
The combination of the random vibration and uncertainty was unavailable in the mathematical model;
The modeling of random vibrations had not been considered as an additional source of uncertainty when control algorithms were designed.
Most of the methods used for the optimal control are based on the linearized dynamic models which may cause uncertainty errors in the existence of the unmodeled dynamics.24,25
However, the main objective of this study is to develop an optimal estimation of UAV control parameters with the consideration of the combination of uncertainties and random vibration noise. Many of the analyses and designs of the researches which are related to the control of the UAV parameters depend on the general scheme of the flight control system (Figure 1). 26
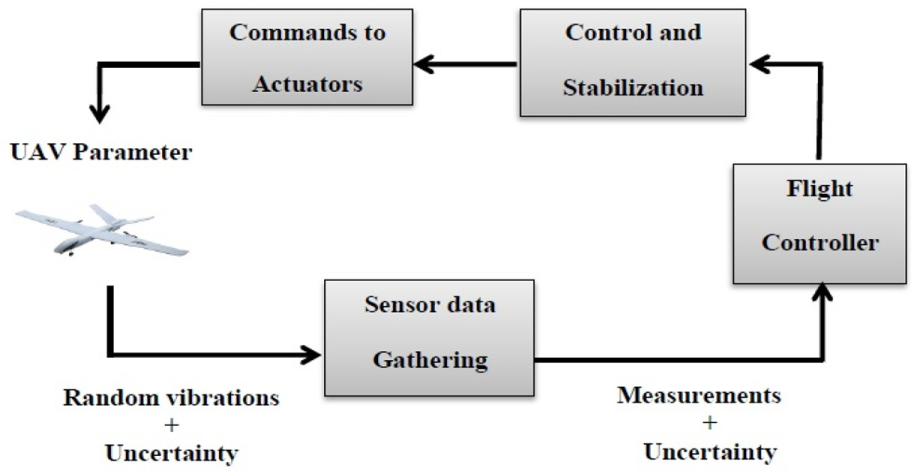
Flight control system of the UAV.
To accommodate the model of control of the UAV parameters, this study presented a mathematical model of the combination of both vibration noise and uncertainty. By considering the influences of vibration noise and uncertainty in the subsystems of the UAV, the mathematical model of vibration noise has produced a set of systematic linear models with the addition of the parameter of uncertainty. Consequently, the parameters can be estimated optimally based on the use of Kalman filter technique.
Combination of random vibration noise and uncertainty in the UAV model
In the execution of any movement of UAV, there is always timing uncertainty. 27 This is due to the fact that when micro-electromechanical system (MEMS) sensors are operating as a standalone navigator in the UAV, they produce positioning errors in the order of several hundred meters per minute. These large errors in the position, velocity, and attitude estimates are mainly due to sensor bias (uncertainty) and vibration noise that corrupt the measurements. 28 The main consequences associated with the uncertainty are described below.
First, it limits the performance of any task of the UAV. Second, it has implications on the overall control system of the UAV. Most of the studies deal with the prediction of the uncertainties in UAV by assuming an uncertainty of (±X dB) in their modeling or by adding a safety factor of (+X dB) to their design. 29
It is important to recognize that all predictions of the uncertainties in the UAV system contain some degree of error. Therefore, when predicting the uncertainties from something as complex as random vibration noise or air disturbances from UAV operations, there are many errors or extra uncertainties that will occur with predictions and the uncertainties associated with the prediction of vibration noise levels can be quite large. Hence, the solution is to mathematically combine the uncertainty and vibration noise in the model of the error and to consider this error as a systematic error.
Dynamic parameter identification of UAV
Dynamic parameter identification of UAV is complicated because of its nonlinear identification models and the combination of noisy and biased (missing) sensor measurements. 30
Many studies presented the problem of the missing measurements (uncertainties) as a linear error; in other words, some predictable bias or constant offset affects equally all the measurements conducted under a given condition. 31 Due to the fact that most of the random vibration noise has nonlinear behavior, the external and internal uncertainties of complex technical systems (including UAVs) can be represented by a stochastic nonlinear differential equation with structural uncertainty 32

with the initial value of
The random response in the UAV system excited by a random vibration can be represented as a mathematical correlation function. Hence, we will consider the mathematical model of random vibration noise represented by the following cross-correlation function 1

Equation (2) can be described by the second-order differential equation with additive noise

where
However, Equation (3) can also be described in Cauchy form with the following notes:
1


When solving the random vibration problems, most studies used simplified models. The inadequacy of such adopted simplified model leads to the random behavior of the UAV along a non-optimal trajectory and does not allow to fulfill terminal conditions with high accuracy. Thus, the observation of the parameters of the UAV can be described by a nonlinear algebraic stochastic equation

where Z(t) represents the extended measurement matrix of the sensors with dimensions m ≤ n; C(y, t) represents the specified sensitive output matrix with dimension m×n; and N(t) represents the output measured noise (combination of random vibration and uncertainty).
Due to the combination of vibration noise and uncertainty, the input random vibration noise ξ(t) will have an expectation (mean) value of

The relationship between the input noise and the output measured noise can be considered as uncorrelated function due to the fact that they are from different sources as produced in this article.
However, if the input noise ξ(t) and the output measured noise N(t) are uncorrelated from each other in time and the parameters in Equation (1) are too small, then the optimal estimation problem can be considered with low measurement noise, and the following initial conditions can be obtained from the expectation values as

Then, it can be stated that

where
If the input noise is correlated with the output measured noise, then the output measured noise will take the Gaussian distribution form which has the following characteristics

Based on Equation (8), it can be stated that the random variable y0 will have the following initial expectation values

Based on Equations (4) and (5), the mathematical differential equations of the expectation value for the process

Consequently, the expectation expression for the process

For the simplicity of the analysis, the variance of the process

Thus, the correlation moment between the processes

with initial condition
Hence, Equation (12) can also be described in the Cauchy form as

In steady state, it can be deduced that

Thus, the variances of the processes
where
To account for model uncertainty and random vibration, the process model used can be modified and Equation (6) can be rewritten in the following form35,36

State estimation of UAV dynamics
As stated in the previous section, the state vector of the UAV will be changing with respect to time due to the combination of random vibration and uncertainty. The state estimation of the UAV dynamics from noisy data is an algorithm that characterizes the following:
The UAV dynamics perturbed by random vibrations, disturbances, or white noise.
The measurements of the sensors that are perturbed by random vibrations to avoid uncertainty.
Based on the observations, the optimal estimation is a significant way to infer the information about the UAV state. For optimal state estimation, the output errors (uncertainties) caused by the random vibrations must satisfy the following conditions:
Unbiased, that is, have zero mean along the time period;
Have a Gaussian distribution along the time period;
Contain all the frequencies (white).
According to the optimal estimation theory, the challenge is to determine the best estimate

The filtering process is using measurements to recover the data gathered by sensors about the state vector of the UAV in the presence of vibrations or uncertainties. 38 One of the filtering types is estimation. The aim of estimation is to recover the missed data about the state vector at time t using measurements up till time (t).
The Kalman filter is the most well-known algorithm that solves the filtering problem and produces an optimal estimate in the sense that the mean value of the sum (the actual linear combination of both random vibration and uncertainty) of the estimation errors gets a minimal value.
However, the solution to the state estimator

where B(t) is the gain of the Kalman filter and it is defined as

Equation (19) involves the covariance matrix R(t) which represents the solution of the Riccati differential equation (RDE) for the filter gain equation.
Computation of the optimal feedback gain of the estimator can be achieved by solving the Riccati equations. This solution will indicate the priori prediction of the performance of the Kalman filter estimator. 1 The Riccati equations will also provide a way for verifying the appropriate performance of the actual estimator when it is running. For this analysis, the related RDE, which provides the covariance R(t) needed for the Kalman gain, is of the form
with initial conditions
Based on the analysis produced for compensating both the random vibration noise and the uncertainty in the UAV system, the block diagram of the parameter control system is presented in Figure 2.
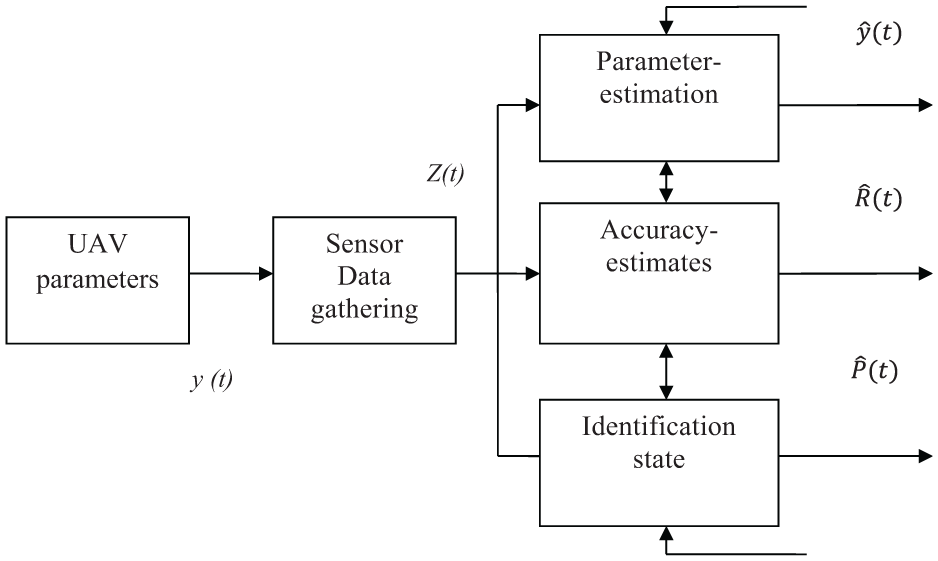
Parameter control scheme for UAV.
In Figure 2, it is designated that, y(t) is the vector of output parameters of the controlled object; Z(t) is the measured parameter vector;
In accordance with Equations (18)–(20), the algorithm for optimal parameter estimation y and


And the covariance R(t) needed for the Kalman gain can be described as



An illustrative example
In this section, a numerical example is proposed to show the effectiveness and feasibility of the developed method used in this study. The example illustrates that the proposed optimal estimation method is suitable for controlling the parameters of an UAV object for minimizing the random (nonlinear) vibration noise and uncertainty.
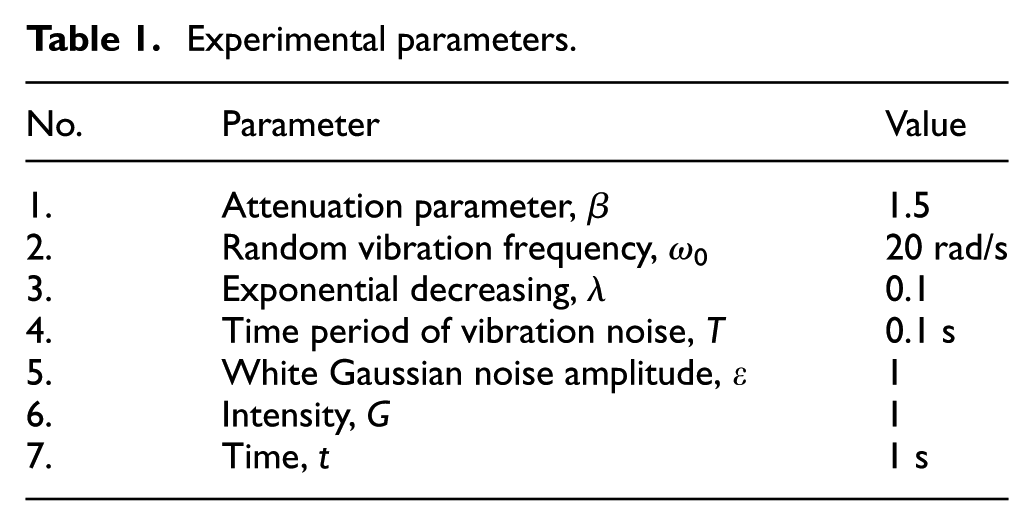
To test the activity of the analysis, the following dynamic parameters are considered for the simulation results (Table 1).
Experimental parameters.
To simplify the analysis, the following initial conditions are considered

The simulation results are shown in Figures 3–7.
System state
System actual state
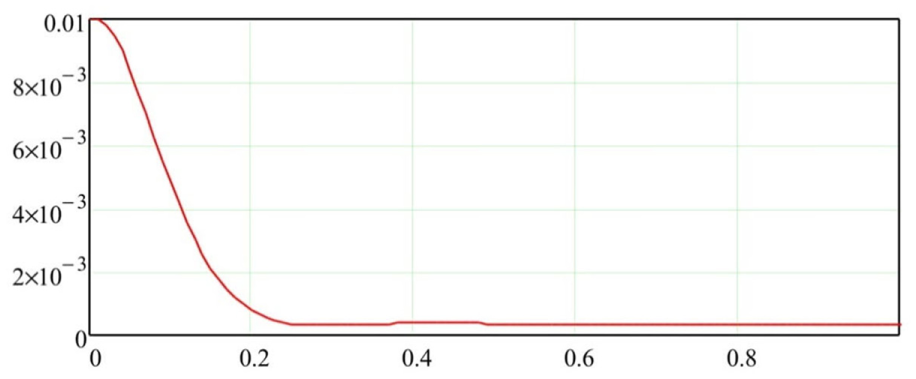
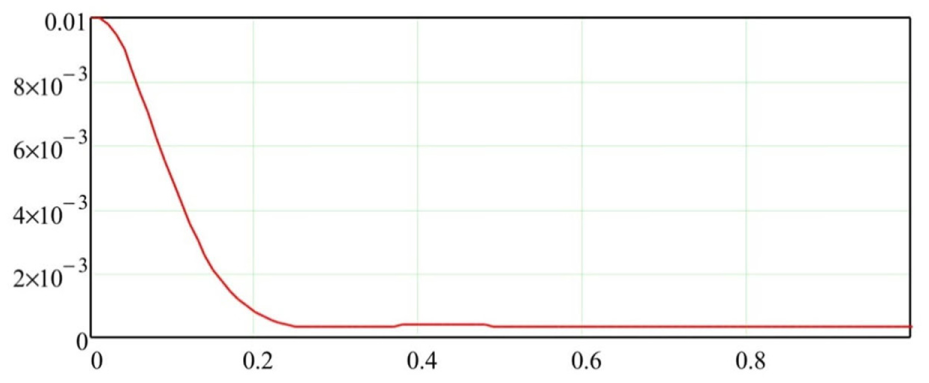
Covariance changing plot R11 for the system state y1(t).
Covariance changing plot R22 for the actual state y2(t).
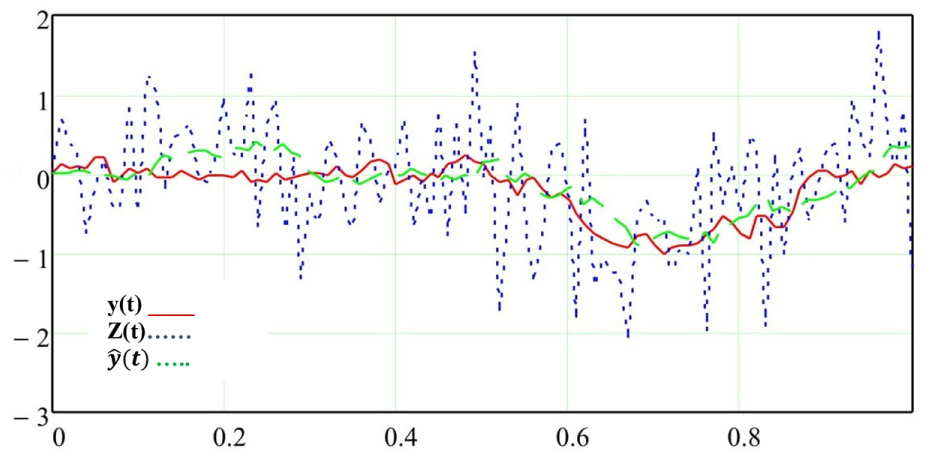
System state y(t), measurement Z(t), and the optimal estimation
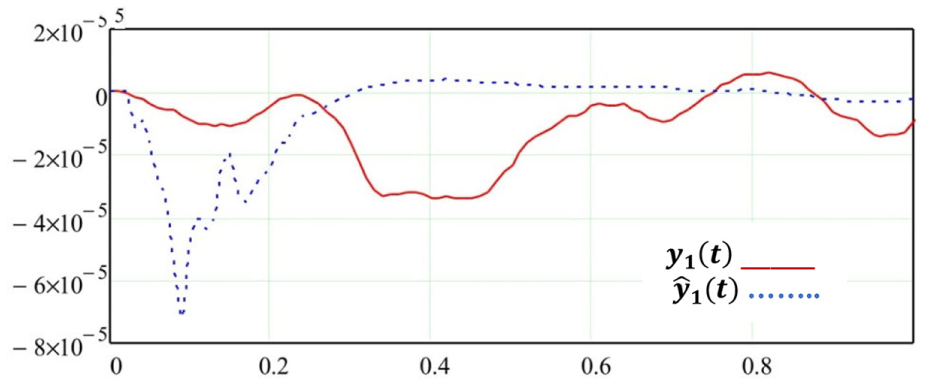
When the random vibration noise and uncertainty are uncorrelated variables, then the system state function y1(t) can be obtained. Figure 3 illustrates the system state function y1(t) and its optimal estimation
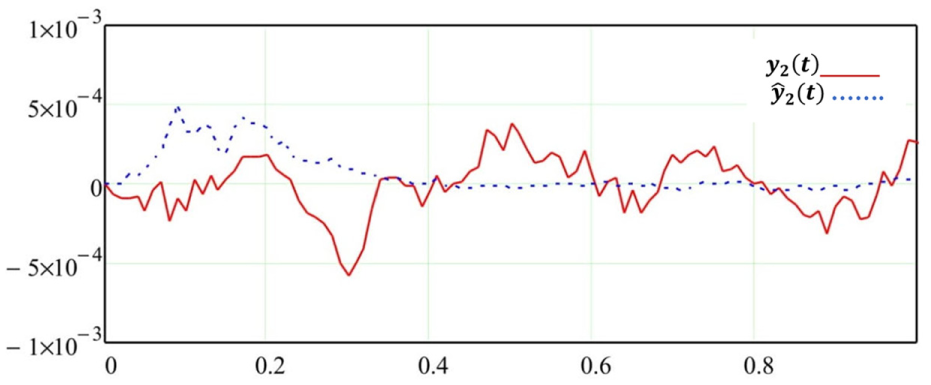
The covariance changing plots (R11 and R22) are illustrated for both the system states, y1(t) and y2(t), in Figures 5 and 6, respectively. Figure 7 presents the comparison between the system state
Based on Figure 7, it can be concluded that the real data obtained from the UAV are always subjected to various types of noise, that is, there is always some amount of uncertainty. Most of the error estimation methods for the UAV parameters require a good knowledge about the error distribution caused by the random vibration and uncertainty of the measured data. Table 2 summarizes the numerical results of the analysis used in this study and provides an impression about the clear difference between the actual system state and the measured state. Table 2 also provides the applicability of the method used in this study for optimal control and state estimation of the UAV parameters regardless of the amount of errors associated with the measuring values due to the random vibration and uncertainty.
Numerical results of the UAV state, measurement, and optimal estimation.

From the simulation results, it can be observed that the proposed method can estimate the system state control parameters well irrespective of the correlated vibration noise and the occurrence of the random uncertainty. Additional efforts have been made to combine the effects of correlated random vibration noise and uncertainty when deriving the Kalman optimal filter. The simulation results give a visual quantitative and qualitative understanding of the process control of the UAV parameters under various noises. Thus, it can be deduced that the optimal estimation and the parameter control of the UAV mainly depend on the presented mathematical model which takes into consideration all the random parameters and not consider them as a predictable constants.
Conclusion
This study introduced an optimal estimation and state estimation approach for the UAV parameter control under the condition of existence of random vibration noise and uncertainty. It has been shown that every measurement of the sensors in UAV will be uncertain due to the presence of random vibration noise. The approximation of the uncertainty in the mathematical model will increase the error associated with measurement instruments used in the source vibration noise measurement of the UAV.
The combination of vibration noise and uncertainty in the model will allow concluding the full mathematical model of control parameters of the UAV. The new model presented in this paper, which is based on the optimal estimation technique, showed the efficiency and effectiveness of this approach. The results showed that the optimal estimation approach for nonlinear parameters should be used rather than the linear deterministic model to minimize the failure rate of the UAV.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.