
Abstract
Generally, robot gripper is the tool to enhancing the efficiency and ability of grasping task of robot manipulator. The interaction between the object and the grasping finger is the main target of robotic gripper design stage. For this research, robot gripper is then proposed as the new method of robot gripper force control using real-time estimate force feedback signal in order to achieve higher performance of grasping objects. Robot gripper kinematics is also analyzed and adjusted to more practical development. The object manipulation is also identifiable using recursive least square estimation technique of both hard and soft objects during grasping. Force controller of robot gripper is obtained using real-time estimate force feedback signal by the recursive least square method. Comparison of proportional–integral–derivative controller gains is tuned with different force feedback signals, normal force feedback, and estimate force feedback during grasping hard and soft objects validated by experiment. The results of design and development are illustrated by simulation and experimental methods. In addition, due to the limitation of electromagnetic interference, signals will not affect other instrumentations with restricted working condition. The range of gripper motion is detected by applied visible light signal of light-emitting diode and photodiode as limit sensors.
Keywords
Introduction
Recently, applications of robotics and automations for industrial evolution have been increasing rapidly. Numerous industries apply robotics and automations for manufacturing in shop floor control such as automotive, electronics and hard disk drive, and electrical appliances. In the production process, a simple task of robot and automation is carried out by machine with human interaction. But for highly dexterous automation manufacturing system, all operational tasks such as picking, placing, loading, and unloading for a material transfer line system are operated by automatic machine or robot without human interaction. The higher sophisticated tasks are more carefully designed with a certain high level of automation system. Complex operation tasks in assembling process with high precision and dexterity still need to develop the new tools and methods to increase the high level of task manipulation. Thus, research on robot gripper design is currently being undergone in order to achieve the higher degree of fidelity and dexterity of the manufacturing process. The current robot gripper research works on design and development are described below. Previous related research works in the literature, such as the sliding mode control of shape memory alloy actuated gripper, are also presented.1,2 The proposed research works have shown the significant advantage of lower weight and smaller size of robot gripper, but its accuracy of position control is still to be further developed. Next, parallel proportional and integral (PI) force controllers are applied to predict the contact force for robotic manipulation of deformable objects. The efficacy of those parallel (PI) force controllers was demonstrated by simulations. 3 In other views, grip force and slippage controller for robotic object manipulation based on mechanical friction model are presented.4,5 These approaches allowed a load to be held without excessive force for a variety of weighting objects. However, the main drawback of those gripper designs was slippage being detected in only one axis. Moreover, the intelligent robotic gripper is designed and implemented to grasp unknown different objects with masses, dimensions, and friction coefficient using fuzzy control during handling object.2–6 Also, an interesting adaptive neuro-fuzzy inference system designed for relation of input and output for force control in order to overcome the slipping of object is proposed.2,7,8 Finally, grip force control based on the degree of slippage using optical tactile sensor is surveyed. 9 Currently, the state of the art of development of a robot gripper is proposed. 10 Recursive least square (RLS) method has been proposed in combination with real-time self-tuning regulator control technique. 11 The above-mentioned research works mostly proposed several methods of control and design of robot gripper. Thus, the high performance of robot gripper control design with high accuracy of force feedback control structure would be still researched to improve the accuracy of grasping force for different physical feature objects. The contribution of the proposed research is to control the force of robot gripper with hard and soft objects. The comparison experiments are set up to validate the grasping force control performance with normal force feedback and estimate force feedback using the RLS method. This paper is organized as follows. Section “Design and development of robot gripper” presents the design and development of robot gripper. Kinematics of the robot design is explained in section “Kinematics of robotic gripper.” In section “Experimental and simulation results,” experiment and simulation design is validated for the overall system into the design stage. Finally, Section “Conclusion” describes the conclusion.
Design and development of robot gripper
Primarily, a general two-finger gripper is first designed as depicted in its three-dimensional (3D) structure and assembly design in Figures 1 and 2, respectively.
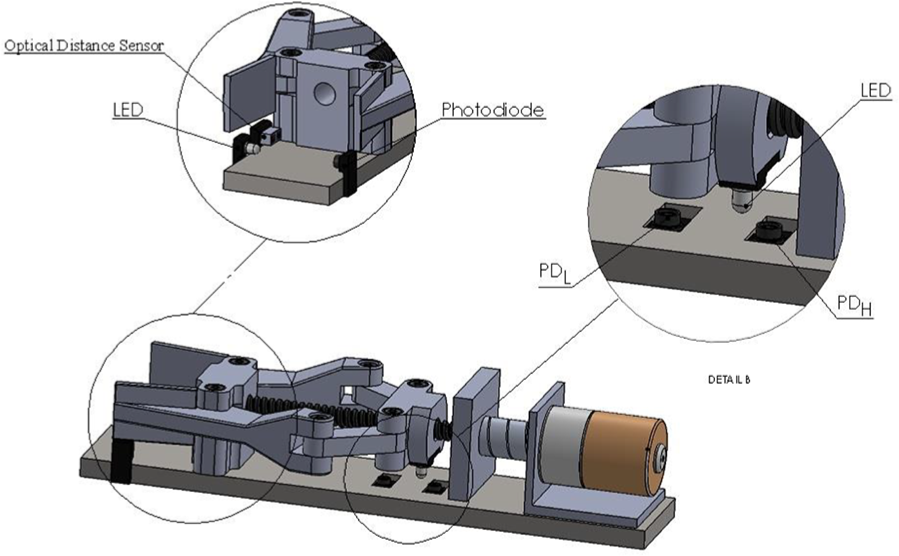
Three-dimensional design of robot gripper.
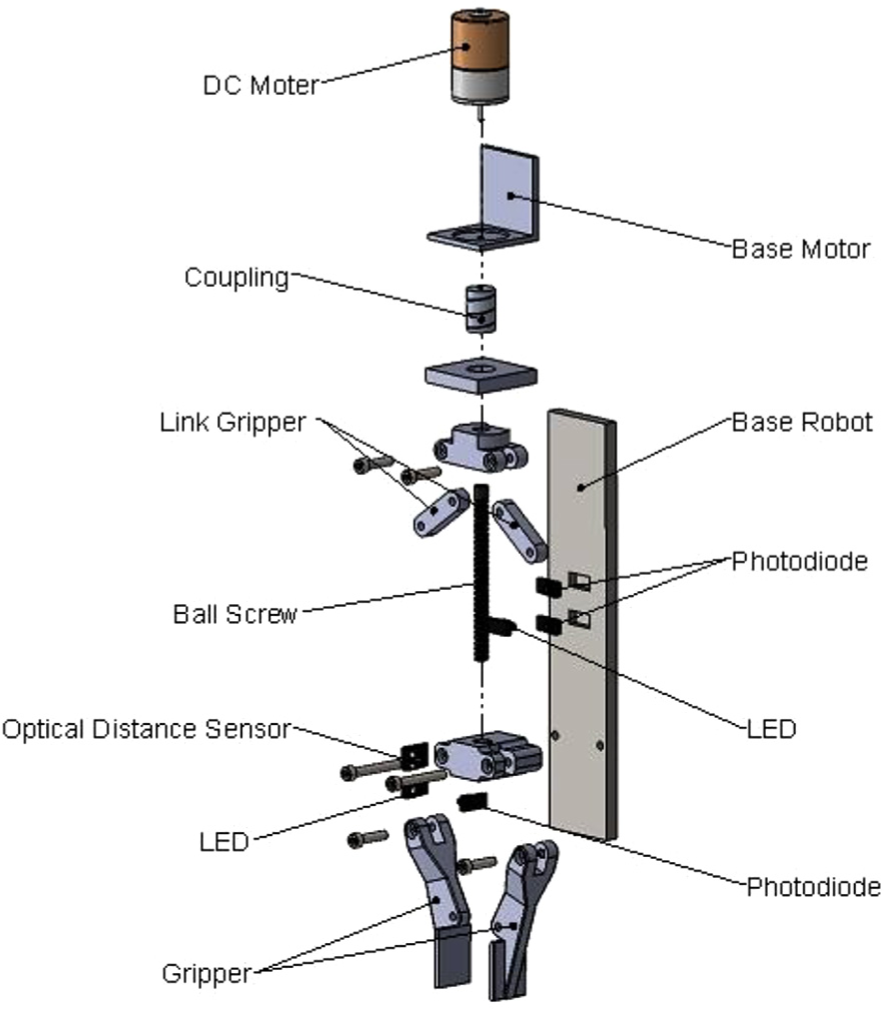
Assembling design of robot gripper.
The mechanical components of the robot gripper are developed, including gripper finger, linkage mechanism, transmission system, actuator, and sensing devices. The material of gripper structure is made from industrial-grade aluminum. Contact force sensing is attached to the gripper finger to measure the contact force. Force sensing resistance (FSR) type, the resistance of which will change to voltage output across a bridge circuit, is applied to measure contact force. DC motor is the actuator for driving linkage and transmission mechanism for grasping and releasing objects. The diameter of those three objects is limited to 38 mm, and their weighs must not be more than 5 kg. The control algorithm is implemented using Arduino microcontroller with MATLAB package tool to implement the robot gripper prototype. The overall design of integrated system development is shown in Figure 3.
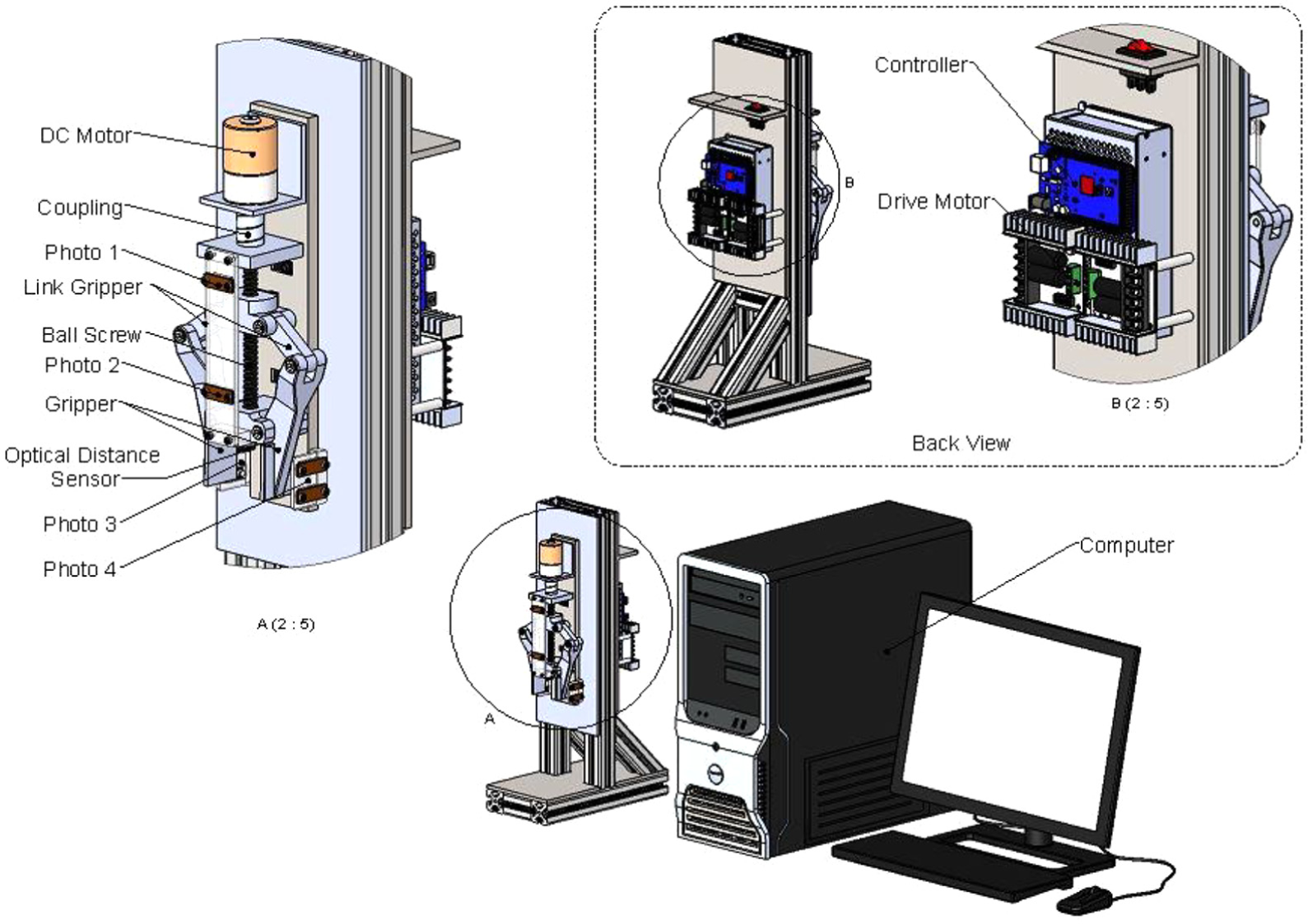
The proposed overall robot gripper design.
Kinematics of robotic gripper
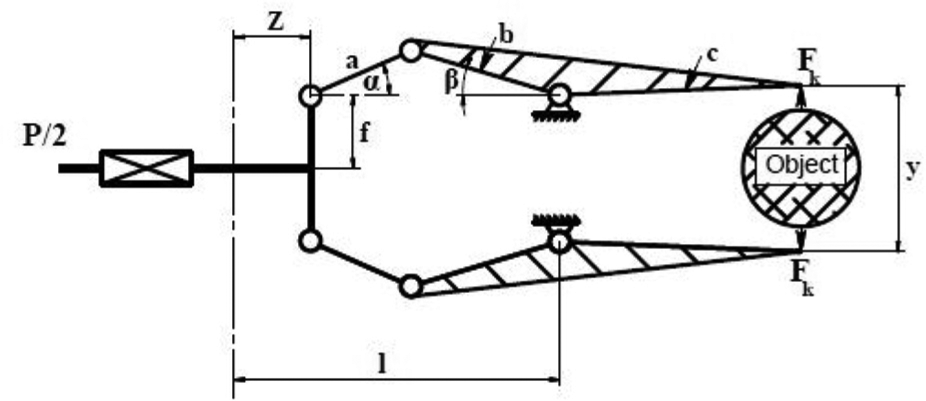
The kinematic and dynamic model of a designed robot gripper is analyzed in order to control the robot gripper precisely. The optimized design of the robot gripper configuration is described.12–14 The most suitable configuration of the two-finger robot gripper is reported, 12 as shown in Figure 4. Thus, this work is adapted to optimize the configuration for this design purpose. The kinematic model is analyzed. 15
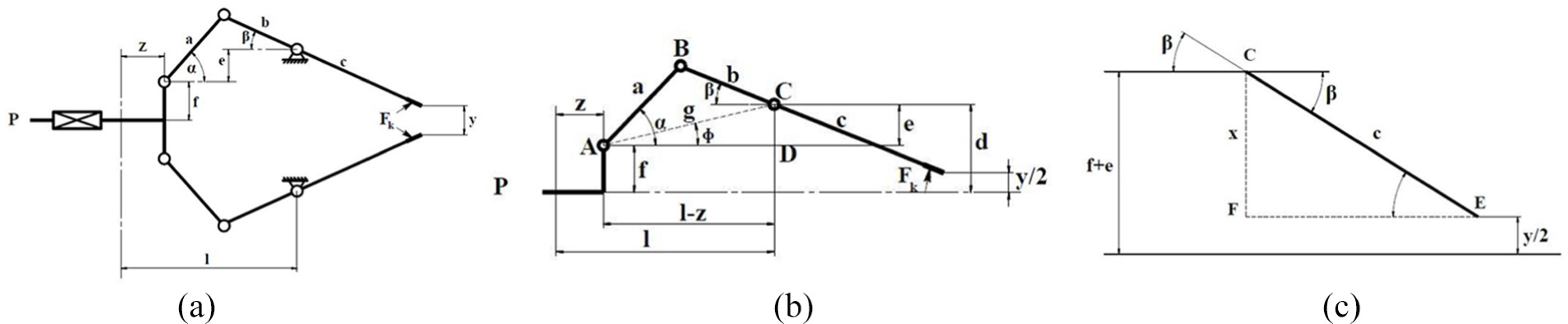
Kinematics of robot gripper for optimal configuration. 12
The relation of actuating force and positioning of gripping force during grasping object is calculated by equations (1) and (2), respectively

and

The actuator of the gripper design is chosen by DC motor, with specific parameters presented in Table 1. Thus, a simple torque and force is calculated by equation (3)

Actuating motor specification.

where
Kinematic model for developed gripper
The development of the robot gripper prototype is related to the abovementioned section. The overall configuration of the developed robot gripper is illustrated in Figure 5. The design data of links and parameters are shown in Table 2. The actuating force is derived as input torque generated by DC motor with microcontroller and electrical amplifier. The output is the acting force at gripper yaw of two-finger robot hand. Ball screw helps the mechanical driver to couple with link
Robotic gripper design and kinematic model.
Design link length parameters.

e = 0 for the developed design model.
Experimental and simulation results
Design robot gripper parameters
Gripping force is the simulated force value of variable angles to acting force. Actuating toque that transfers to link of gripper with resultant force is 47 N through links
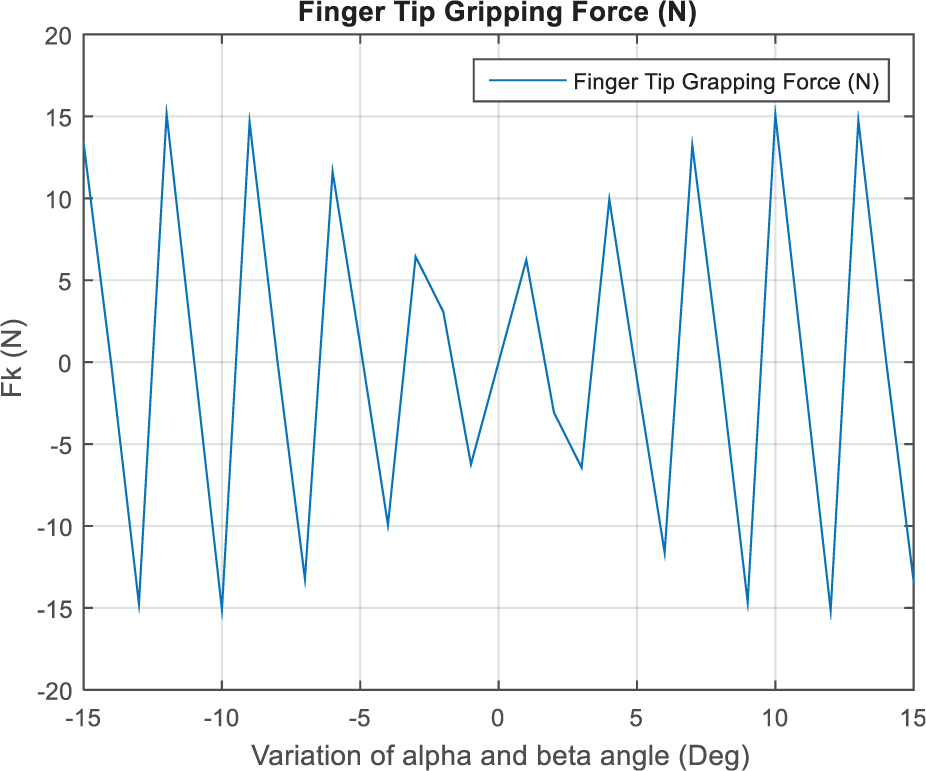
Force output relation to robot position configuration.
The position and velocity of the fingertip robot gripper are described in Figure 7. The fingertip gripper position can be obtained using equation (4). The fingertip gripper velocity can be obtained using equation (5)

and

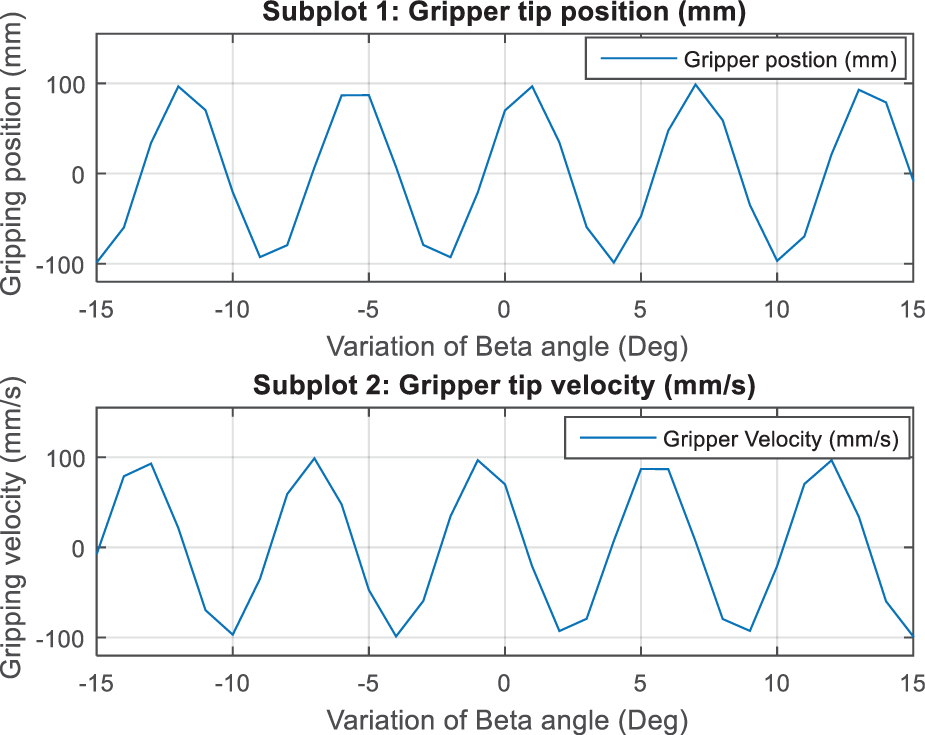
Position and velocity of robot gripper hand tip.
Estimation with linear time-invariant system
A linear time-invariant model is considered as system input

General system.

where

The system with sampling time




Linear regression with ARX model
Error model structure
The input–output model of linear difference equation is described by equation (12)

where

We introduce equations (13) and (14) as follows

and

Then

With ARX (autoregressive with exogenous terms) model

When
Prediction of parameter is computed using equation (17)

In deterministic model, the vector of predictive values can be introduced as equation (18)

Equation (18) can be rewritten as equation (19)

Prediction of known data vector
Compliant estimation by RLS approach
RLS is calculated by equation (20)







Sequence of computational RLS method
Linear model

The square error model between output and actual output is represented by equation (30)

By minimizing the function, unknown parameter can be obtained by the inversion method in equation (31)

Recursive algorithm is a chosen method to solving the linear system, since it is more simpler solution than inversion methods. There are three main steps of computation, represented by equations (32)–(34).
Step 1: To find gain

Step 2: To find the covariance matrix
Step 3: To calculate the unknown estimated value

Algorithm of computation is implemented through four steps, represented by equations (35)–(38).
Step 1: Initialize parameters
Unknown parameters
Step 2: Update parameters



Step 3: Repeat steps 1–3
Step 4: Return the estimated true value
Compliant estimation of hard object by experimental data
The compliant estimation of force during grasping objects is carried out through experimental data. The computational algorithm is computed using the RLS method with a defined forgetting factor
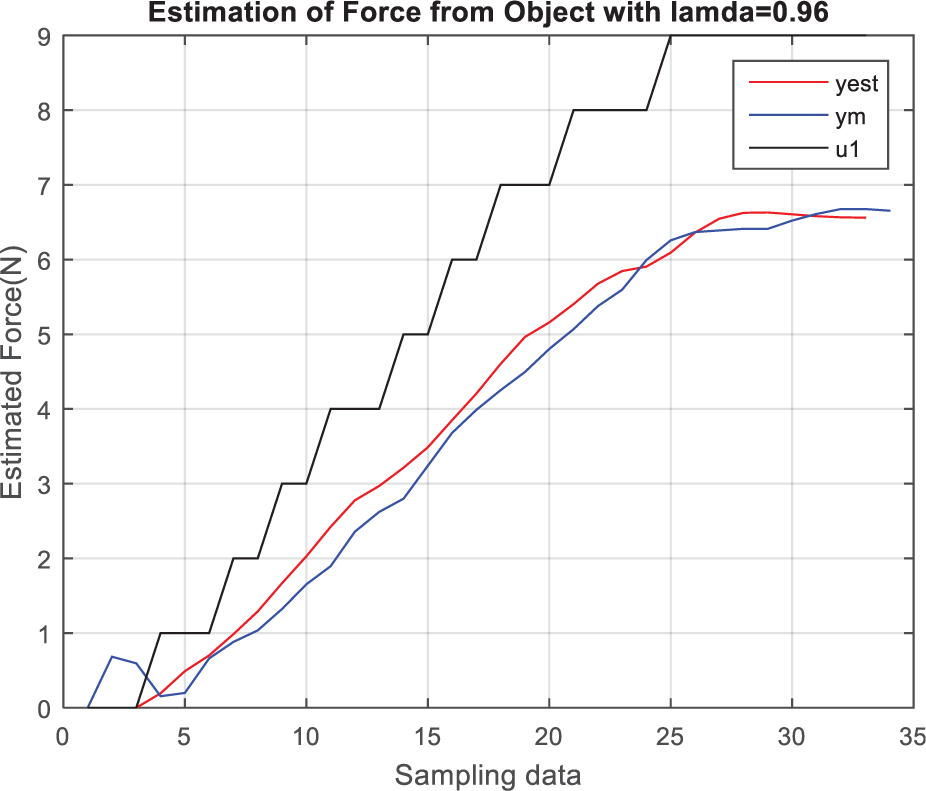
Estimation of force of hard object.
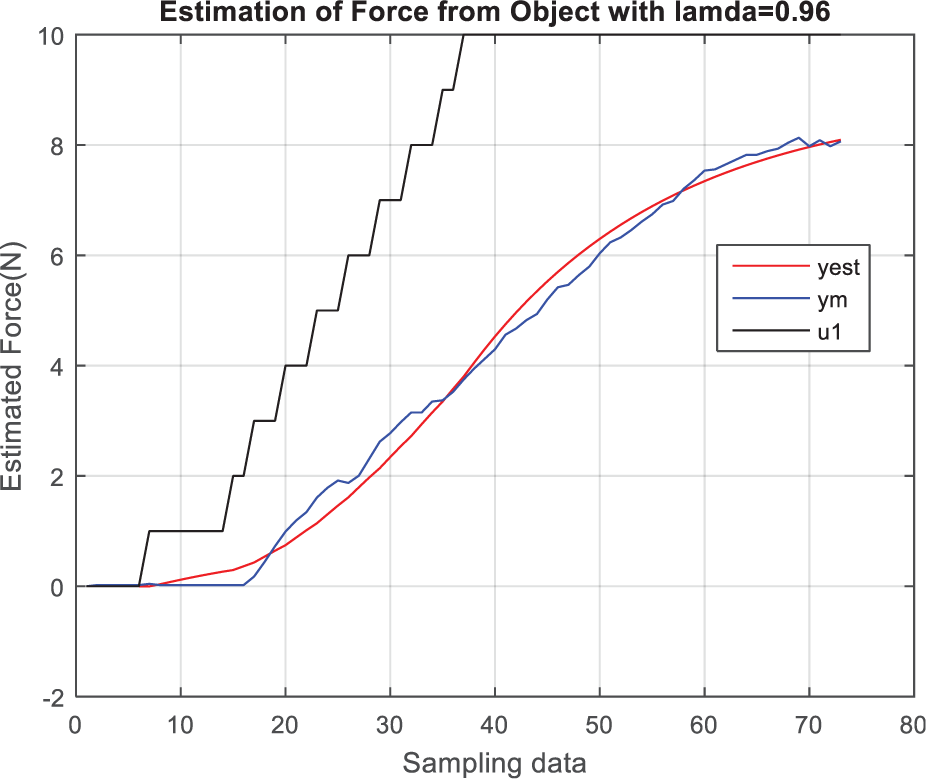
Estimation of force of soft object.
Experimental results
Transmitter and receiver device
For transmitter, light-emitting diode (LED) with
In the case of receiver, it will receive the
Wavelength
Robot gripper control using LED and photodetector
LED and photodiode are functional to limit sensor that consists of transmitter and receiver parts:
In the transmitter part, illumination of LED is adjusted by PWM value using microcontroller through graphic user interface (GUI) of MATLAB software in duty cycle block, which is shown in Figure 13. The value of the duty cycle can be adjusted from 0 to 1 level, since the value “0” will cause the highest LED illumination.
In the receiver part, the operation of input signal can be thresholded by the prescribed condition of “On” and “Off” that depends on the received value of light intensity with reference value and deviation in voltage signal level. This condition of signal will be calculated using microcontroller to control the motion of robot gripper.
Force sensor interface
Force sensor is applied to measure a contact force ranged from 0.1 to 10kgf. The interface of force quantity is converted to voltage signal using the potentiometer circuit, as shown in Figure 11. The relationship of output voltage and resistive change is calculated by equation (39)

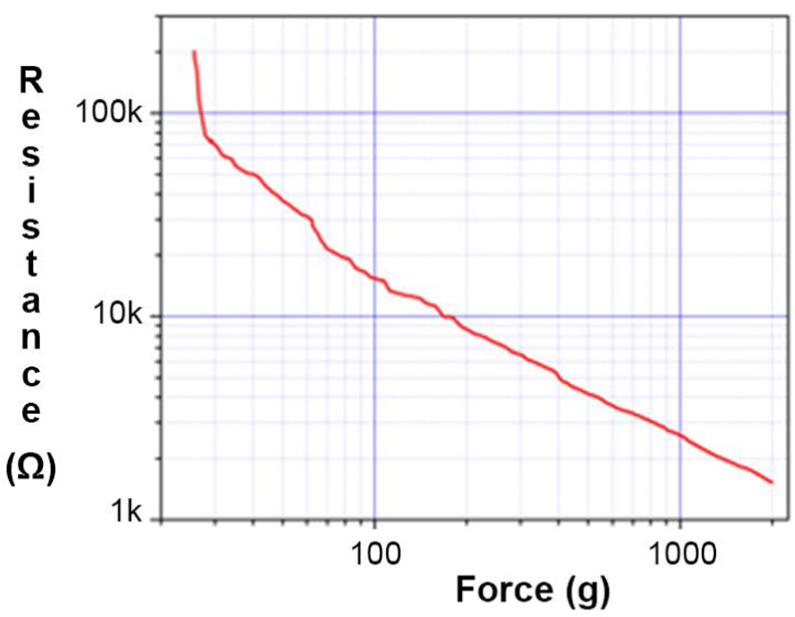
Voltage output relationships between force and resistance change.
Robot gripper control operation
The operation of robot gripper control consists of two modes of operation, manual and automatic control:
In the manual mode, the operation for controlling the robot gripper is commanded through GUI button by fixing the duty cycle at 0.4% of robot gripper velocity.
In the automatic close loop, the operation of gripper control is the control gain from the difference between reference force command and force measurement feedback. Force control is implemented with the proportional–integral–derivative (PID) controller technique. Gains of controller can be assigned via GUI command.
Hardware control
The experiments are conducted to measure and control the grasping force of robotic gripper when grasping the different objects—hard and soft objects. Force sensor is attached to the yaw gripper hand tip to be used for force feedback measurement of the current contact force between the object and the grasping finger. Command of force is assigned through GUI interface by computer interfaced to microcontroller to set the command of force to manipulate objects.
The RLS algorithm with online estimate sets parameters for computation for using three data samples with initial values as
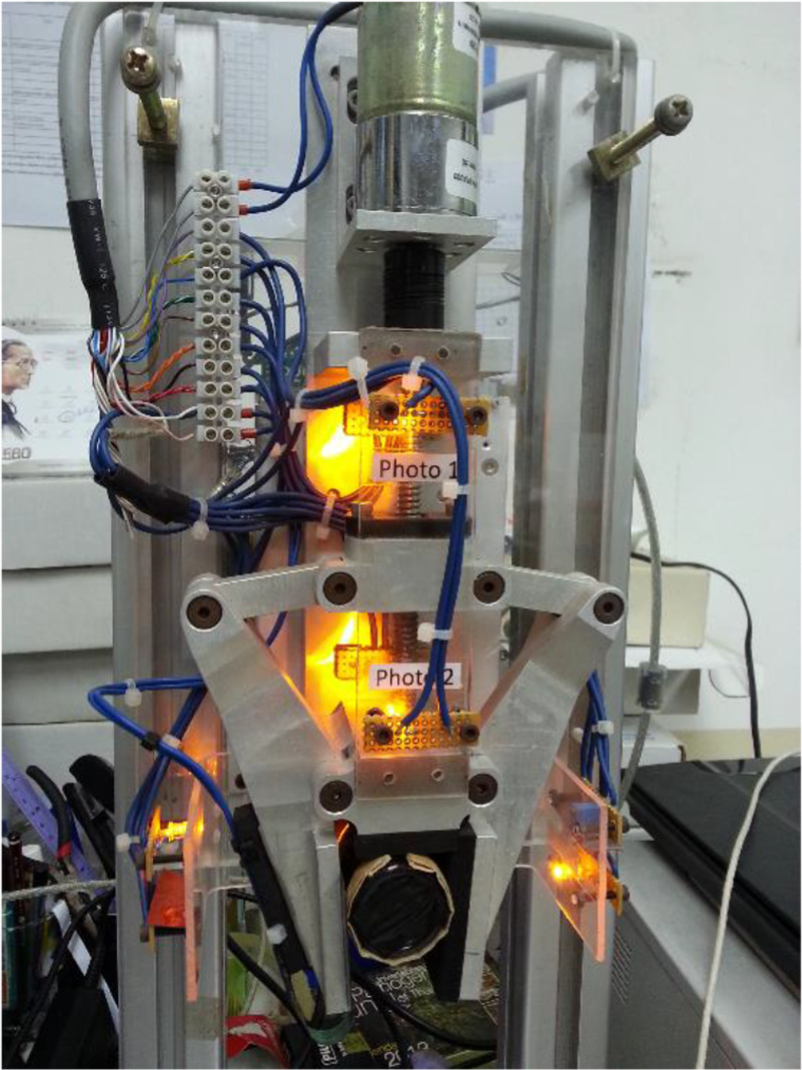
Photo of experimental setup.
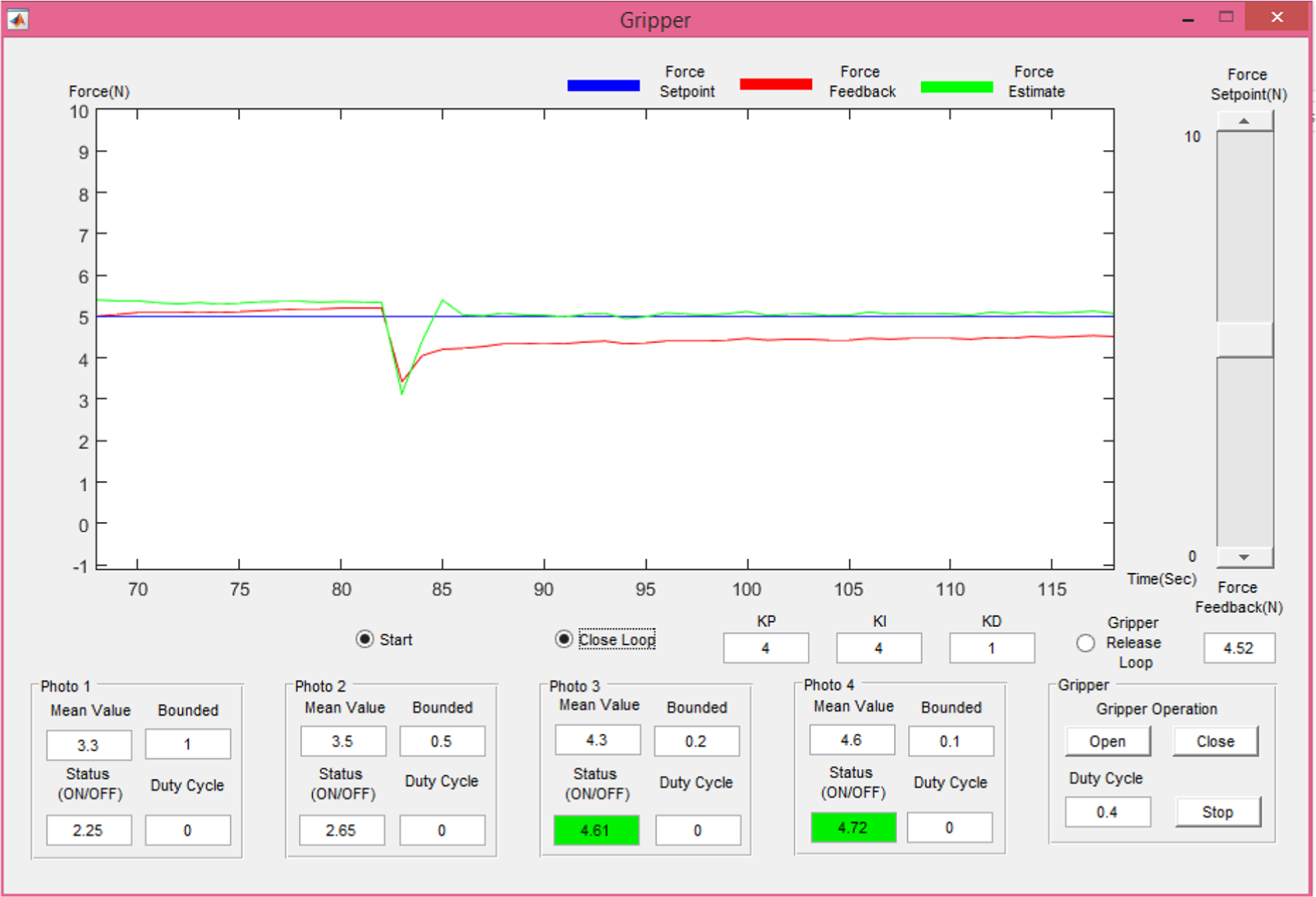
Experiment results by GUI interface.
PID controller gains.
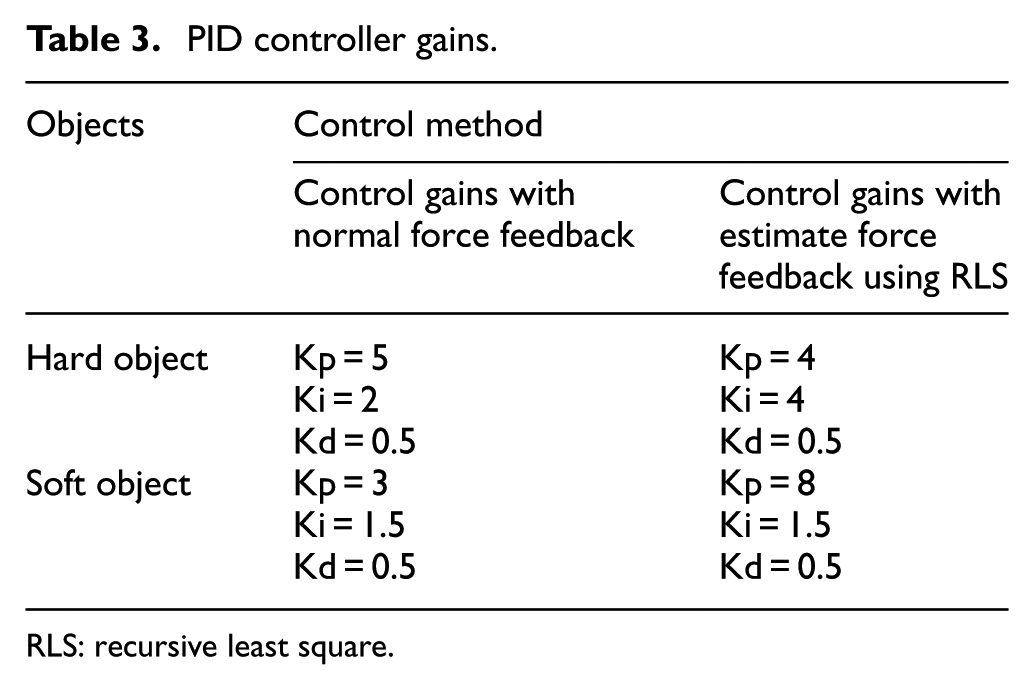
RLS: recursive least square.
GUI interface is developed for assigning and receiving data between the controller and the computer. Start and stop control of robot grasping can be commanded through specific design button. Force feedback information of robot control characteristics can be displayed in the main window. The other status of LED and photoelectric signal and gripper operation in jog mode is presented in partition window. Command force is assigned by using the slider tab for command set point. PID controller gains are adjusted by online tuning control gains at Kp, Ki, and Kd labels.
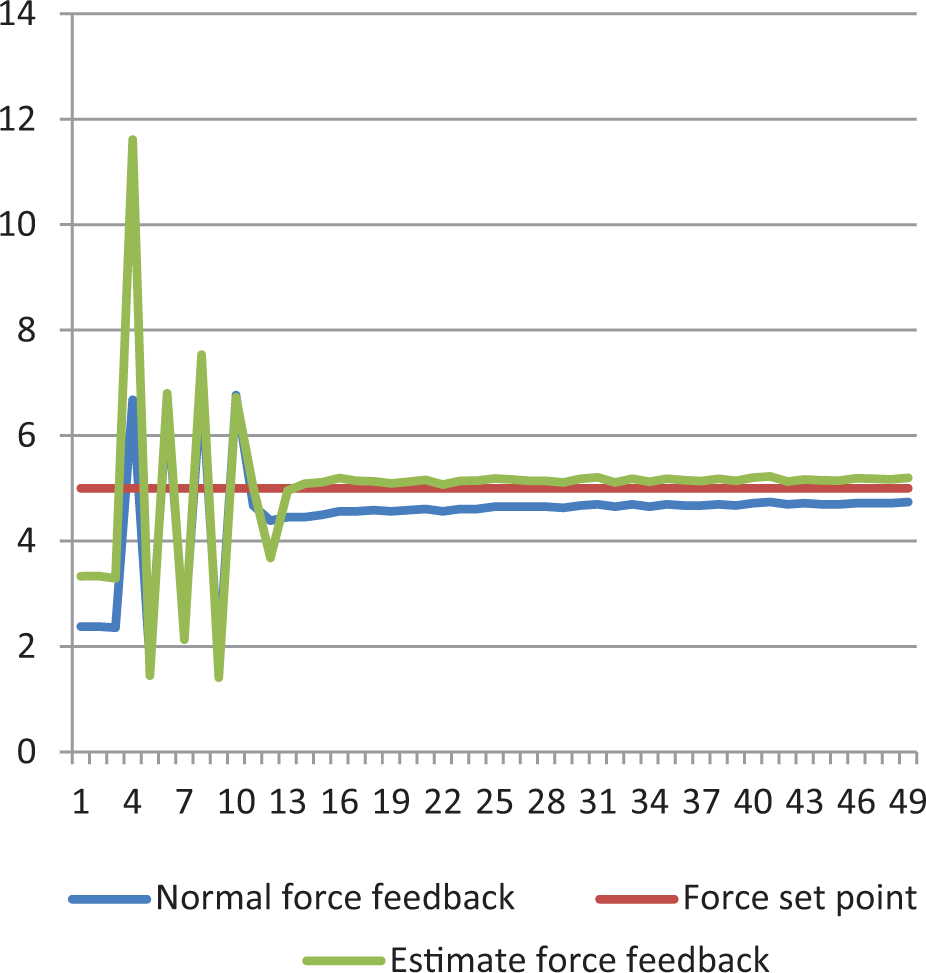
From the experiment, results of grasping hard and soft objects with normal force feedback are illustrated in Figures 14 and 15. Results of grasping hard and soft objects with real-time estimate force feedback using the RLS method are illustrated in Figures 16 and 17. The better force control performance is validated by minimal error at steady state condition. Thus, real-time estimate force feedback using the RLS method has higher performance of grasping force control of both hard and soft objects. The high gain of control for grasping soft object is required in the tuning process.
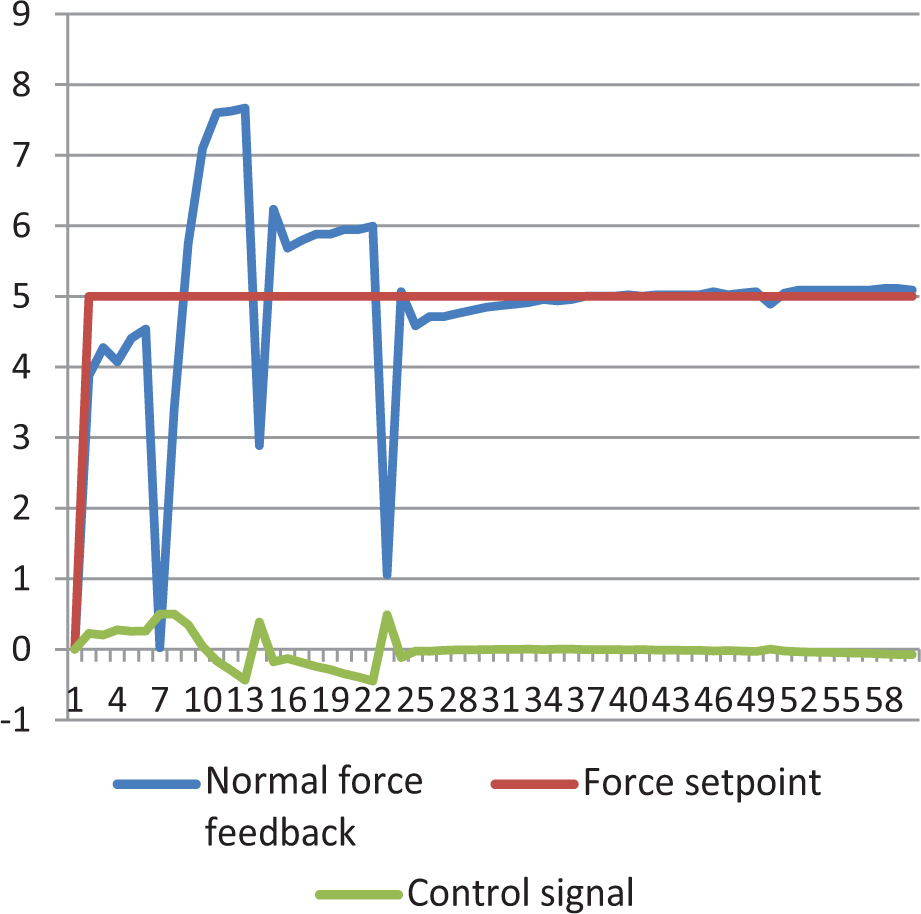
Force control for grasping hard object with normal force feedback.
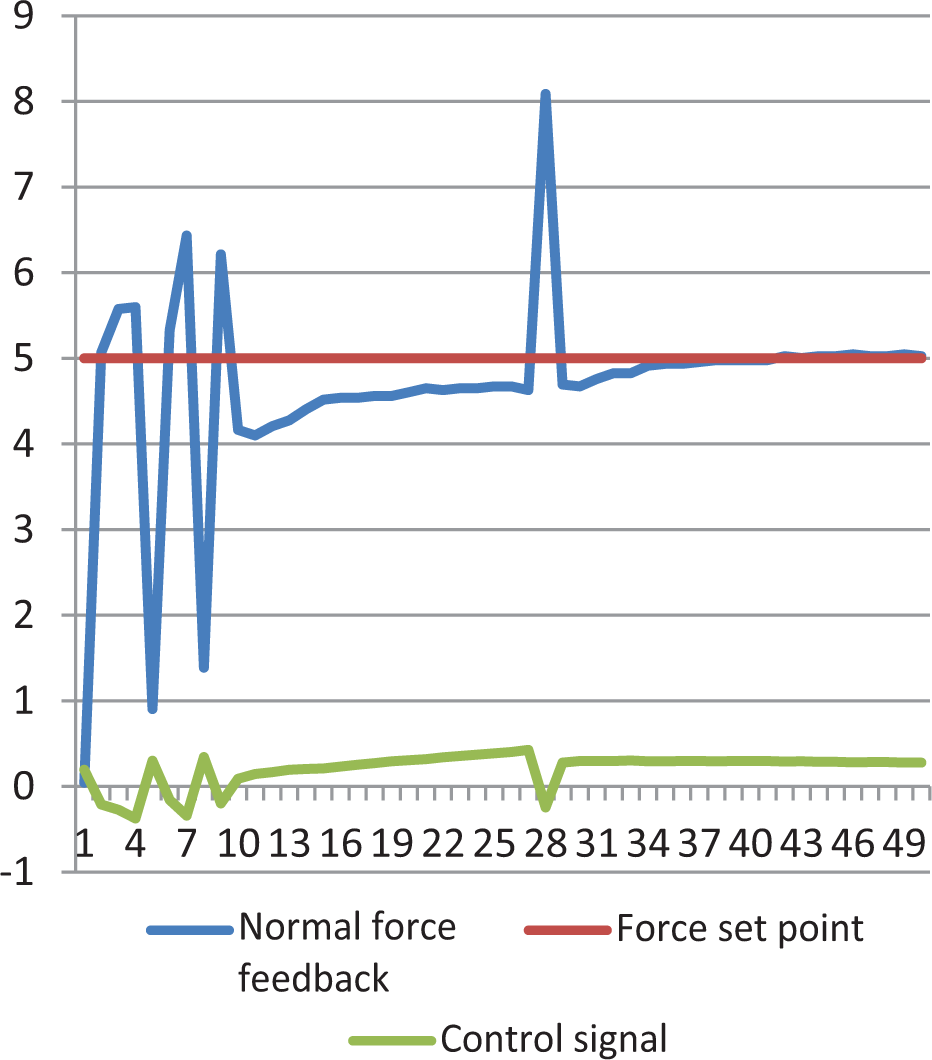
Force control for grasping soft object with normal force feedback.
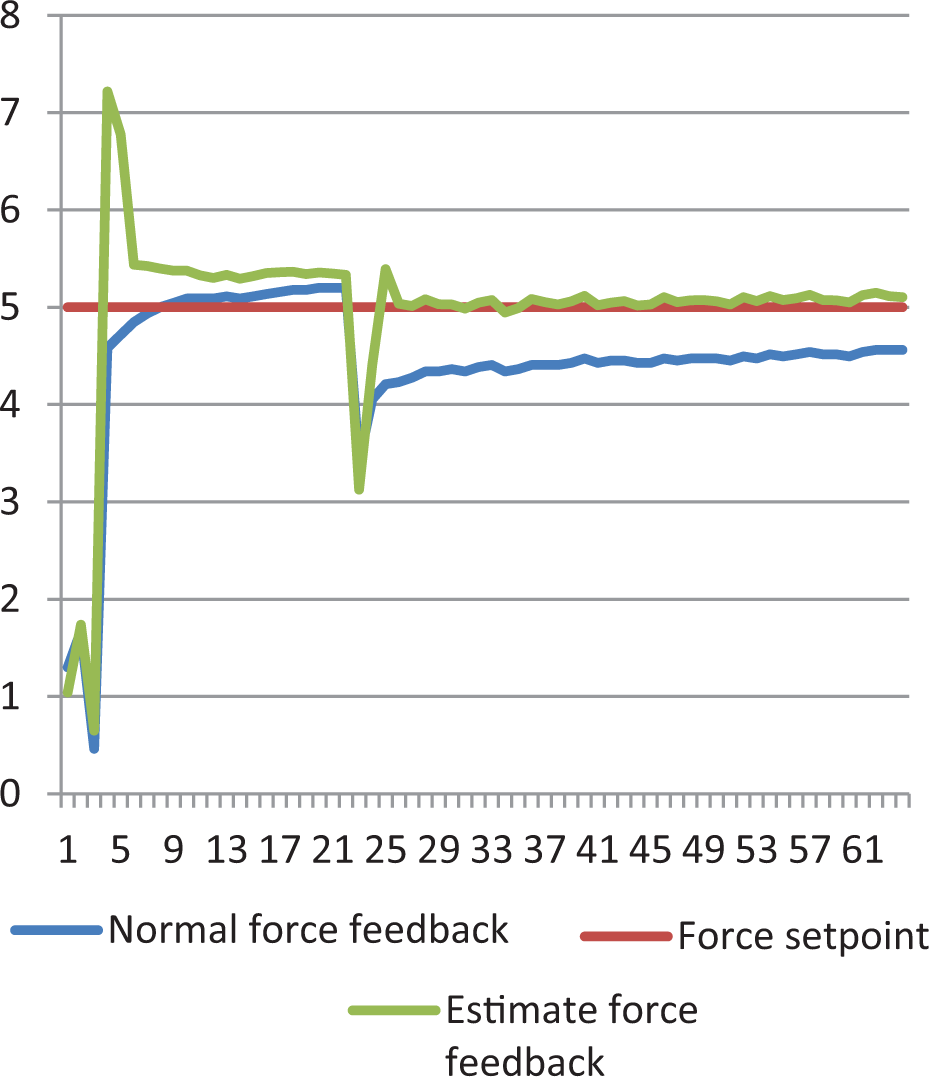
Force control for grasping hard object with real-time estimate force feedback using the RLS method.
Force control for grasping soft object with real-time estimate force feedback using the RLS method.
Conclusion
Design and development of a novel system of robotic gripper is proposed as this research objective. The design gripper is based on the simple two fingers of robot gripper type. The mechanism of links and parameters is revised for development. The limit motion range of the traditional mechanical stoppage could be replaced by using the principle of visible light system. LED and photodiode apply to system with limit switch of gripper motion. The more reliability and user-friendliness for controlling the robot gripper of control operation are beneficial for GUI applications. The visible light signal will not affect the interference to other equipment signals, especially in the hospital or in restricted signal workplace. Indeed, object compliance can be estimated through the least square regression (RLS) method. The estimation of contact force of hard and soft objects is more precise in control design and implementation in the online estimation algorithm. Robot gripper force control is mainly controlled using the PID control algorithm. There are two cases in experiment of force control. Case 1 is set for control with estimate force feedback using the RLS method, and case 2 is set for control with normal force feedback. From experimental results, controller gains are tuned with different values for hard and soft objects in both cases of experiment. The GUI interface of robot gripper control is implemented for manipulation of controlling gripper and displaying data. Future work should be focused on the learning algorithm for grasping multiple objects in order to recognize force feature to enhance grasping performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by King Mongkut’s University of Technology North Bangkok (contract no. KMUTNB-GOV-59-14).