
Abstract
Earth pressure in sealed chamber is affected by multisystem and multifield coupling during shield tunneling process, so it is difficult to establish a mechanism earth pressure control model. Therefore, a data-driven modeling method of earth pressure in sealed chamber is proposed, which is based on parallel least squares support vector machine optimized by parallel cooperative particle swarm (parallel cooperative particle swarm optimization-partial least squares support vector machine). The vectors are parallel studied according to different hierarchies firstly, then the initial classifiers are updated by using cross-feedback method to retrain the vectors, and finally the vectors are merged to obtain the support vectors. The parameters of least squares support vector machine are optimized by the parallel cooperative particle swarm optimization, so as to predict quickly for large-scale data. Finally, the simulation experiment is carried out based on in-site measured data, and the results show that the method has high computing efficiency and prediction accuracy. The method has directive significance for engineering application.
Keywords
Introduction
With the acceleration of industrialization and the needs of national significant strategies, the number of underground engineering projects is increasing. The earth pressure balance (EPB) shield machines are more and more widely applied to the construction under various soft soils. The EPB shield machine must maintain the excavation face stable during the tunneling process. Otherwise, it will cause earth surface deformation or even catastrophic accident. 1 Therefore, it is necessary to establish a prediction model of earth pressure to accurately predict the pressure in real time which can provide a basis for making control decision. Because the pressure in the sealed chamber is not only related to the multiple subsystems of shield machine, but also related to multifield coupling of the tunneling process, multi-phase medium components in chamber, geological conditions, and so on. It is difficult to establish a mechanism model of the earth pressure. Therefore, some scholars began to study modeling methods based on in-site construction data. Yeh 2 proposed to establish an earth pressure control model using back propagation (BP) neural network, which is first proposed to establish the model based on data. Alvarez et al. 3 established a control model for shield machine based on fuzzy neural system. Manuel and Luis 4 used the discrete element method to establish a discrete numerical model of the pressure. In Liu et al., 5 the pressure model was proposed based on mechanism analysis and least squares support vector machine (LS-SVM). In Liu et al., 6 using the basic LS-SVM theory, the earth pressure prediction model was established, and based on it, an optimization model was established, and then the optimal advance speed and screw conveyor speed were solved through particle swarm optimization (PSO) algorithm. In Li et al., 7 the model was established by the autoregressive moving average model (ARMA). In the above studies, the influence of the distribution difference of initial training samples on the classifier performance was not considered, as well as the efficiency and real-time performance for large-scale calculation. Therefore, the practicality of the model will be greatly affected.
Since the LS-SVM follows the structural risk minimization criterion, the structural parameters are determined according to the sample data during the training process, and the learning problem is transformed into the solution of linear equations, which speeds up the solution process. 8 In order to accurately and quickly predict the earth pressure in chamber based on large-scale data, a data-driven modeling method of earth pressure is proposed in this paper, which is based on parallel LS-SVM and the key model parameters are optimized by parallel cooperative particle swarm optimization (PCPSO). The support vectors are learned in parallel hierarchically, and the parameters C and σ are optimized by cooperative particle swarm, so as to complete fast prediction for large-scale data. Finally, the effectiveness of the method is verified through simulation.
LS-SVM regression algorithm
LS-SVM is an extension of the standard support vector regression machine.9,10 The optimization index uses the square term and it replaces the inequality constraint of the standard support vector machine with the equality constraint. Therefore, the quadratic programming problem is transformed into solving linear equations, the model is
where
Lagrangian function is established for the above optimization problem
where
K is defined as the kernel function,

The RBF ( Radial Basis Function) kernel function is a linear feedforward network learning algorithm with the characteristics of global convergence, fast learning speed. Therefore, this paper uses the RBF kernel function

where
Cooperative particle swarm algorithm
Particle swarm algorithm is an optimization method based on evolutionary computation technology. The basic idea is to find the optimal solution through information transmission and information sharing among individuals in the group. It has the advantages of fast convergence, few parameters, easy implementation, and small influence by dimensions. Particles update themselves by tracking two “extreme values.” 11 In order to avoid that particles oscillate around the local optimal solution, in this paper, the velocity calculation formula of particle swarm is established 12
where
The global extremum of the algorithm is defined as gBest and the local extremum is



Parameters optimization of LS-SVM model based on PCPSO
For the cooperative particle swarm, the population has to experience time-consuming secondary optimization calculations during every optimization process and the calculation efficiency is not high, so the cooperative particle swarm is group-optimized in parallel in this paper. The tracking process of particle swarms is done in a relatively independent parallel process, which not only improves the speedup but also ensures the diversity of the population in each process, and it is not easy to fall into the local minimum.13,14 Different parameters
Initialize the particle swarm algorithm parameters. Each process is assigned a group of particles for parallel computing. The structure of particle swarm on the
Get training set
Take the mean square error as the fitness function that can reflect the performance of the LS-SVM prediction model directly

Minimizing the fitness function can evaluate whether the optimization algorithm is convergence based on the parallel cooperative particle swarm. If the fitness value exceeds the allowable value, the cyclic calculation is continued; otherwise exit.
The local preferable solution is selected from the particle swarm of each process as follows

In the mean time, gather them into the main process, then the global optimal solution is selected from the particle swarm in main process as follows
where
Receive the global optimal solution
The main process judges whether the training times reach the maximum value or the fitness value reaches the requirement. When the condition is satisfied, the optimization finishes; meanwhile, the optimal parameters C and σ are obtained; otherwise, then go to step 2.
Establishment of earth pressure prediction model based on parallel LS-SVM
Parallel learning method is to decompose the original problem into several sub-problems and then integrate them. The advantage for this method is that it can shorten the training time and it has good scalability.15,16 Therefore, a parallel learning algorithm of LS-SVM is proposed in this paper, which divides all features into several feature subsets according to different abstract levels, then process them in parallel using multiple classifiers, in the meantime update the initial classifiers using feedback method. The structure of the parallel LS-SVM algorithm is shown in Figure 1. The first layer: the original training sample set T is decomposed into four training subsets
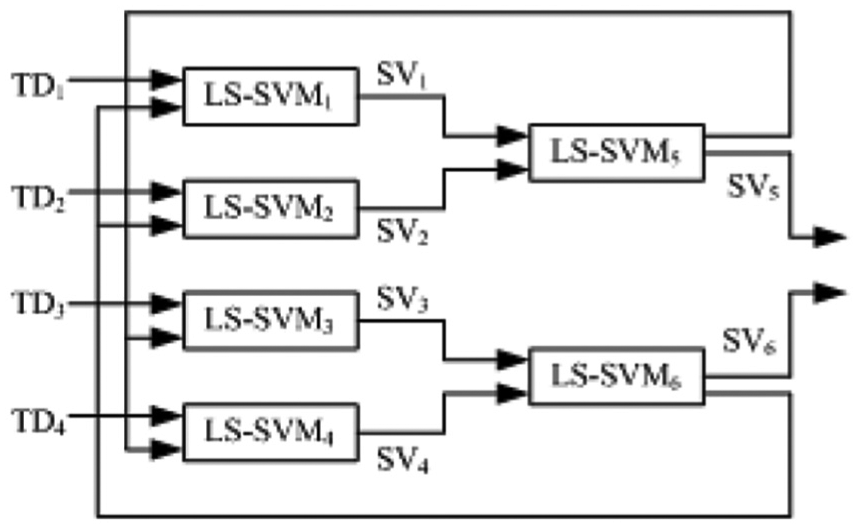
Structure of the three-layer parallel LS-SVM.
The steps of the algorithm are summarized as follows:
Decompose the original training sample set T into four training subsets:
Combine
Cross-feedback
If
After training, the support vector set is merged, and the earth pressure prediction model
Simulation experiments and analysis
Project overview
The relevant data of simulation experiments were collected from No.10 line of Beijing Metro, and the ring numbers of the segments are 360–390 in one section. The soil texture mainly was mixed filling, sandy clay, silty clay, fine sand, and pebbles. The depth of tunnel is 12.6 m and the groundwater depth is 7.1 m. The project adopts the EPB shield construction method. The diameter of shield machine is 6.25 m and the excavation diameter is 6.28 m. There are four earth pressure sensors in chamber which are respectively located on the horizontal and vertical diagonal lines perpendicular to each other at the center of the pressure-bearing plate. The distance to the circumference is 0.9 m. The distribution of the sensors is shown in Figure 2, and all pressure data for the experiment were collected from them.
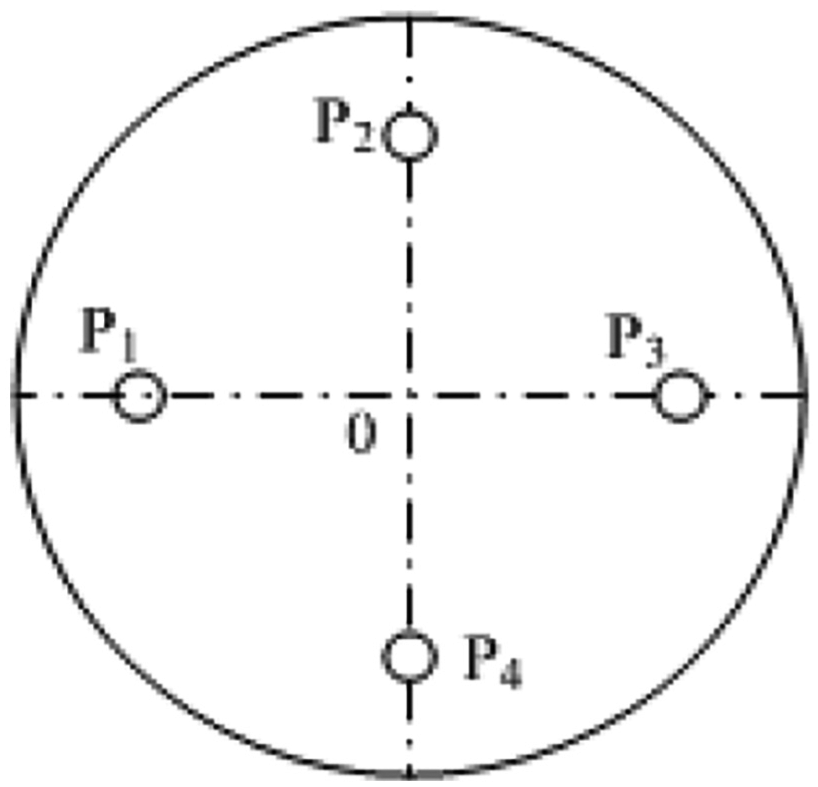
Distribution of the sensors in soil chamber.
Data acquisition and parameters setting
According to actual tunneling control experience of the shield machine, the main control parameters affecting the earth pressure
The simulations are carried out using MATLAB software. Based on multiple experiments repeatedly, the best initial parameters are obtained as follows: the particle population size is 240, which is random equally divided into four processes for calculation. The number of dimensions of each particle is 2, inertia factor
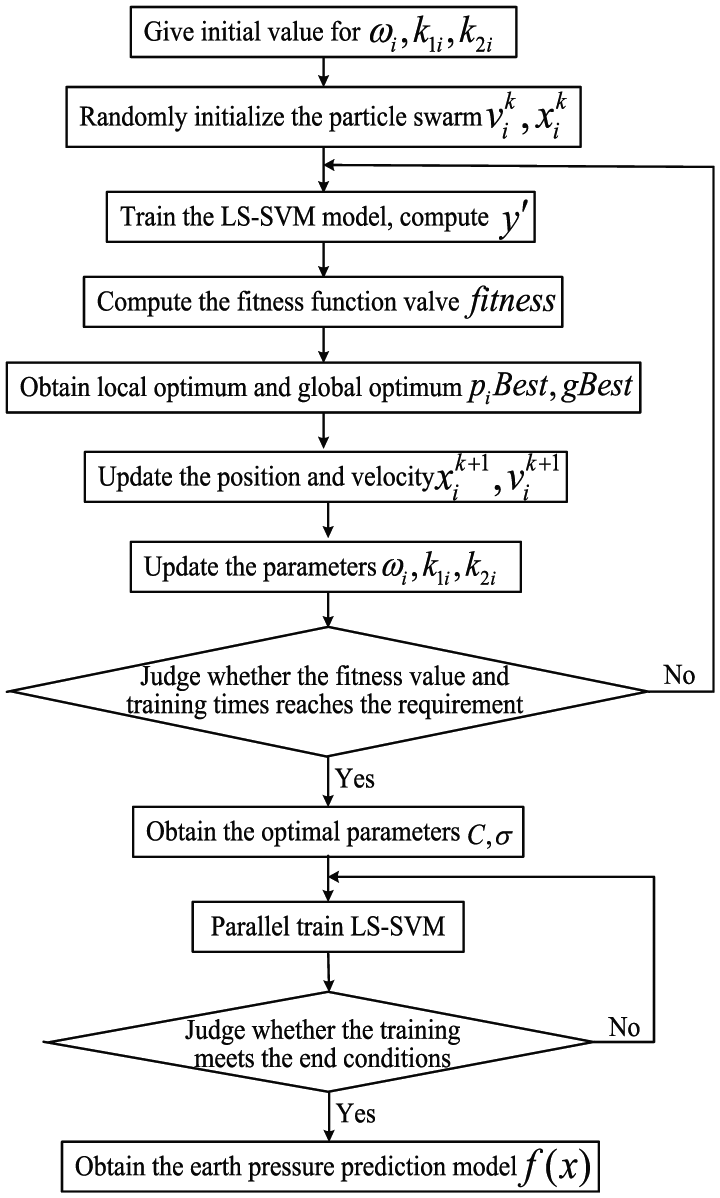
Flow chart of PCPSO-PLSSVM algorithm.
The experimental computer is ThinkPad X1 Carbon, Intel(R) Core(TM)i5-4210U CPU at 1.7 GHz.
Experimental results and analysis
Validation of the prediction model
In order to reflect the pressure change of the entire excavation face, we predict the earth pressure of the four monitoring points
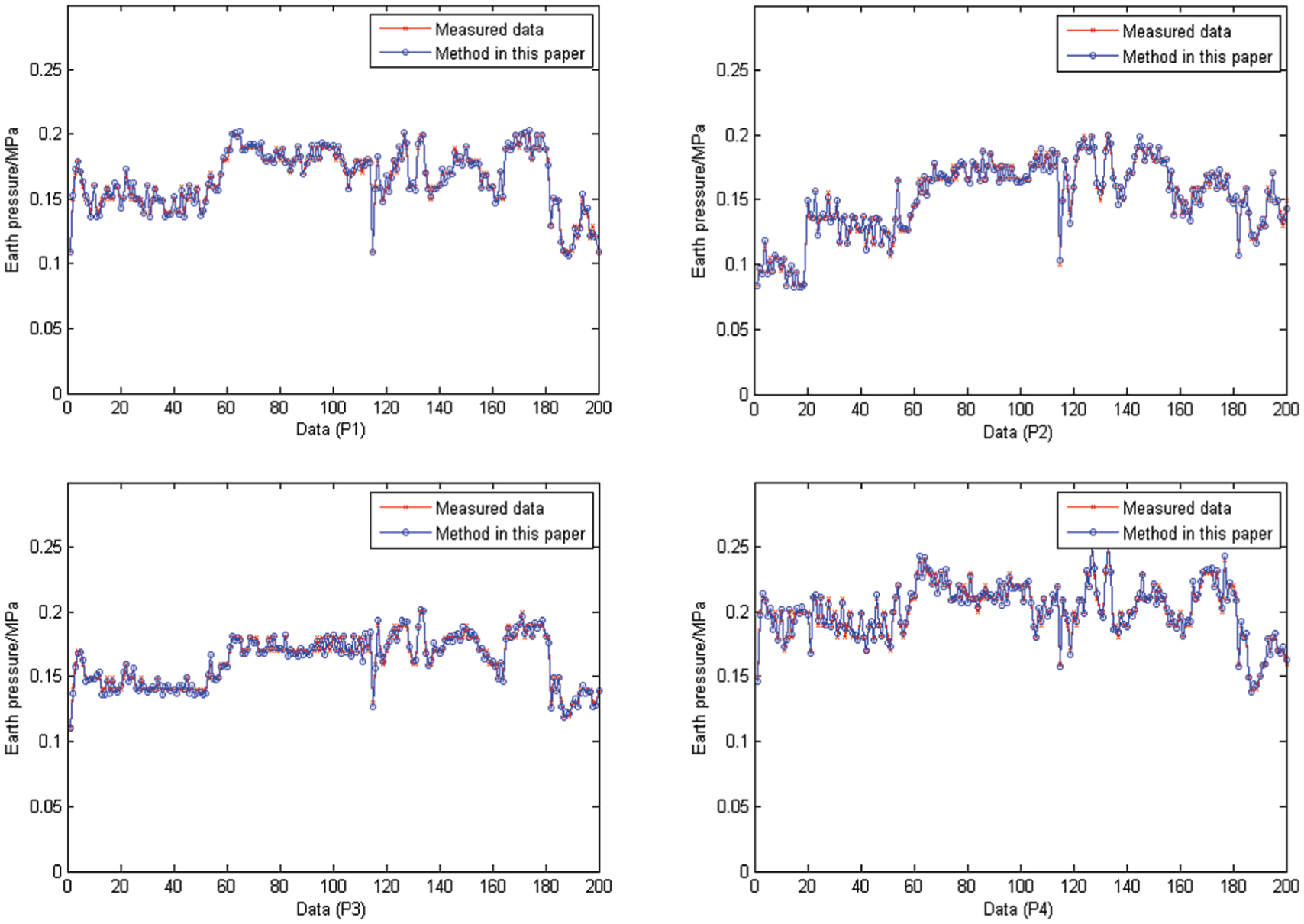
Prediction results of the four monitoring points
In Figure 4, the red line is the measured value of earth pressure, and the blue one is the predicted value of earth pressure. It can be seen that for the four monitoring points
Comparative analysis of prediction results
In order to verify the effectiveness of the proposed method, it is compared with standard LS-SVM algorithm. In order to make the effect more obvious and intuitive, only 100 data samples are used for prediction. The comparison prediction results are shown in Figure 5 and the corresponding prediction errors are shown in Figure 6.
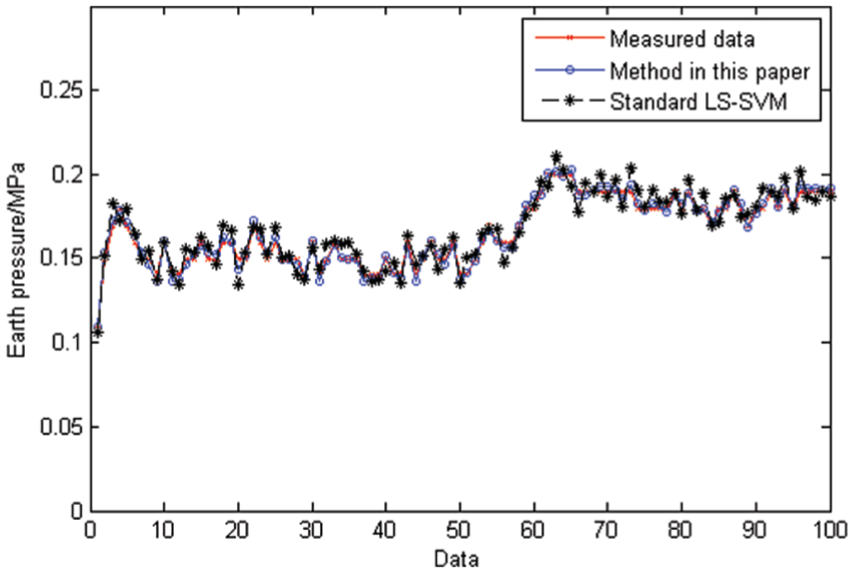
Prediction results contrast of the two methods.
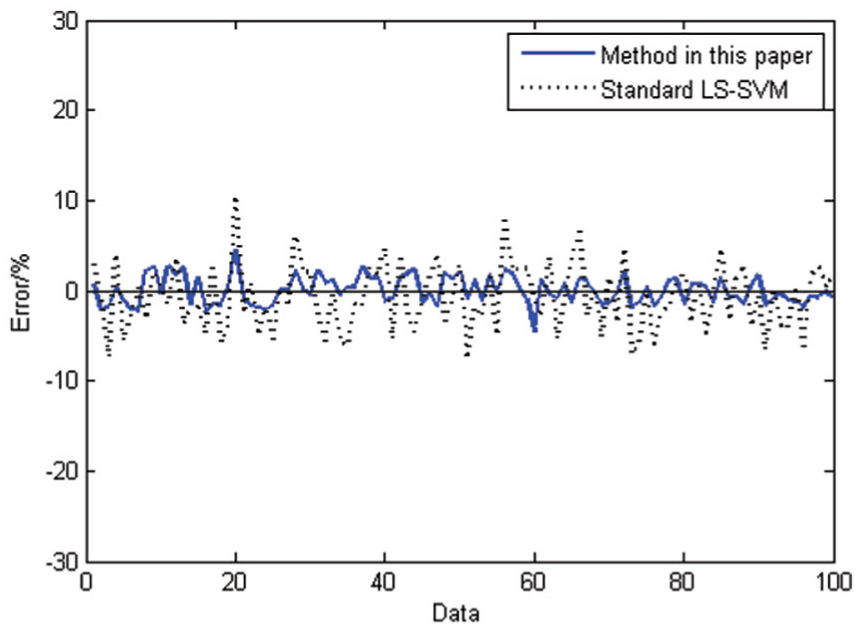
Error contrast of the two methods.
In Figure 5, the red line is the measured value of earth pressure, the blue line is the predicted value by proposed method, and the black line is the predicted result of the standard LS-SVM. It can be seen that the prediction results of this paper are closer to the measured values than the standard LS-SVM method, and the prediction effect is better. The error comparison is shown in Figure 6, the blue line is the prediction error in this paper, and the black line is the LS-SVM prediction error. It can be seen that the prediction error in this paper is significantly smaller than that of LS-SVM, and the prediction accuracy is higher. In addition, in order to fully demonstrate the characteristics of the proposed method, it is also compared for the compute time and the root mean square error (RMSE), and the results are shown in Table 1. It can be seen from Table 1 that the RMSE of each monitoring point is significantly smaller than the LS-SVM method, and the compute time is also shorter. The compute accuracy and efficiency of this method are improved.
Contrast of computation results of PCPSO-PLSSVM and LS-SVM.
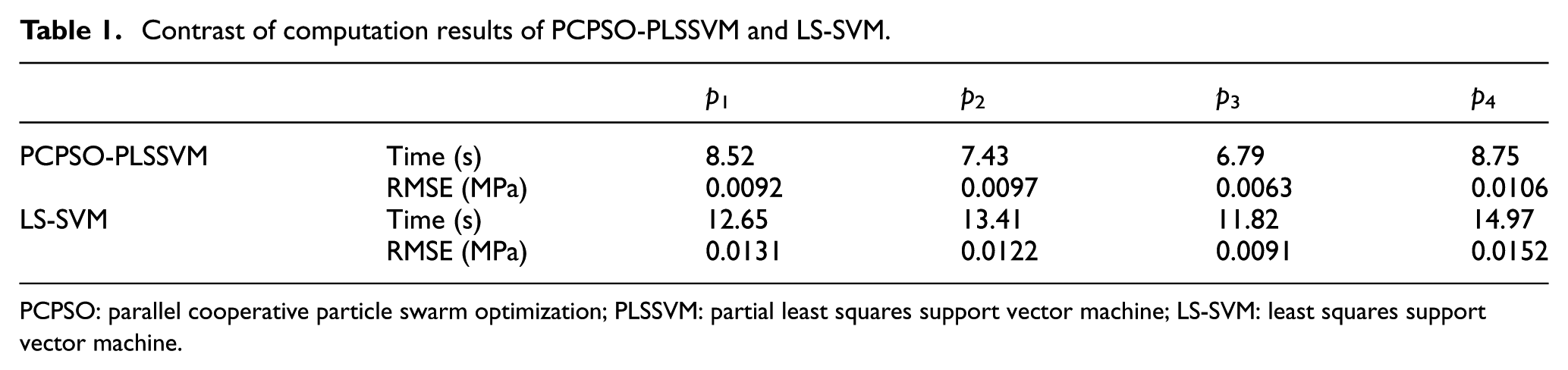
PCPSO: parallel cooperative particle swarm optimization; PLSSVM: partial least squares support vector machine; LS-SVM: least squares support vector machine.
Conclusion
In order to predict the earth pressure in sealed chamber accurately, a data-driven modeling method based on parallel LS-SVM optimized by multiple cooperative particle swarm is proposed. The support vectors are hierarchically parallel learned, and then they are cross-feedback retrained to obtain the support vectors for establishing the prediction model. The simulation results based on field data show that the method can significantly improve the modeling efficiency and accuracy.
In the future, as an important part of the automatic control system of shield machine, the method can be used to monitor the earth pressure change of entire soil chamber in real time, and it can provide basis for quick decision-making about the EPB control. It can be widely used in underground engineering to ensure the construction safety, especially in soft soil stratum.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work is supported by the national natural science foundation of China (grant no. 61773190) and the Doctor Start-up Scientific research foundation of Liaoning province (grant no. 201501104).