
Abstract
Background:
Earth pressure balance shield machines are widely used in underground engineering. To prevent ground deformation even disastrous accidents, the earth pressure in soil chamber must be kept balance to that on excavation face during shield tunneling. Therefore, in this paper an advanced control strategy that a least squares support vector machine model-based predictive control scheme for earth pressure balance is developed.
Methods:
A prediction model is established to predict the earth pressure in chamber during the tunneling process by means of least squares support vector machine technology. On this basis, an optimization function is given which aims at minimizing the difference between the predicted earth pressure and the desired one. To obtain the optimal control actions, an improved ant colony system algorithm is used as rolling optimization for earth pressure balance control in real time.
Results:
Based on the field data the simulation experiments are performed. The results demonstrate that the method proposed is very effective to control earth pressure balance, and it has good stability.
Conclusion:
The screw conveyor speed and advance speed are the major factors affecting the earth pressure in chamber. The excavation face could be controlled balance better by adjusting the screw conveyor speed and advance speed.
Keywords
Introduction
Earth pressure balance (EPB) shield machines are used for excavation tunnels and so on in underground space construction. They mainly consist of cutterhead, shield body, screw conveyor, propulsion device, and so on. The space between cutterhead and clapboard is called soil chamber. During tunneling process, the soil chamber is full filled with muck cut by the cutter, therefore, the earth pressure in chamber must be kept balance to it on excavation face, so as to avoid the ground surface deformation. It is one of the technical difficulties of shield technology.
Currently, the common method for the EPB control is adjusting screw conveyor rotational speed or advance speed, 1 which depends mainly on the experiences of operator and is usually hysteretic. Consequently, it will cause some problems such as meandering routes, ground subsidence, and machine failure. To overcome these problems, some researchers have attempted to apply the intelligent control technology to shield tunneling construction. The fittingness of fuzzy control in shield tunneling process was first discussed and then successfully used in shield automatic control and management during excavation.2,3 The compound control of fuzzy control combined with a traditional proportion integration differentiation (PID) control that can compensate the closed-loop error and enhance the system performance was applied to the complex and multivariable shield tunneling process. 4 To improve the dynamic response and stability of the system, a fuzzy immune control method was developed and applied to shield’s EPB simulation system with time delay, nonlinear, and time-variable characteristics. 5 However, the fuzzy control is usually based on expert knowledge and difficult to examine all the input–output data recorded for the complex tunneling process to adjust the rules and membership functions.
Modern control theory such as optimal control or robust control theory seems to be an interesting alternative; however, they are based on accurate mathematical models. Therefore, some researchers began to study the EPB control model for shield tunneling. Sugimoto and Sramoon 6 proposed a model of the theoretical dynamic load acting on the shield during excavation. Subsequently, to verify the performance of the model, the simulation experiments of the shield behavior were carried out by applying the model of the loads acting on shield to the shield tunneling work. 7 Shi et al. 8 established an EPB control model with the measured data using the adaptive network-based fuzzy inference system. Cheng 9 modeled the mechanism of the earth pressure in the soil room of the shield based on a back-propagation neural network (BPNN). However, these models are not suitable for controlling the earth pressure real time. It is actually highly difficult to obtain accurate model for the complex process of shield tunneling to predict its interacting and nonlinear behavior.
However, in the process industries, model predictive control (MPC) has been widely accepted for set-point tracking and overcoming model-plant mismatch. 10 MPC is a form of control in which the current control action is obtained by solving on line a finite horizon open-loop optimal control problem at each sampling instant, using the current state of the plant as the initial state. 11 The predictive control algorithm is a brand-new computer-controlled optimization methodology which is featured by its multiplicities of predictive models, scheduled optimization of rolling forward, feedback adjustment compatibility, practicability of industrial process, excellent control capability, and robustness as well. 12 However, a very key factor of successfully applying MPC to solve these problems is the existence of an accurate prediction model. 13
SVM based on statistical learning theory has been developed to solve classification and regression problems. For its universal approximation ability, SVM is also successfully used to model nonlinear process with small samples, nonlinearity, and higher dimension. SVM maps input data into a high dimensional feature space and constructs an optimal separating hyperplane in this space. This basically involves solving a quadratic programming (QP) problem with inequality constraints in dual space.14,15 LS-SVM is a modified version of SVM, in which analytical solutions can be obtained by solving linear equations instead of a QP problem, and it reduces greatly the computational complexity. 16
Therefore, an LS-SVM model-based predictive control scheme for EPB is proposed in this paper. A dynamic prediction model of the system is established by means of LS-SVM, which is used to predict the controlled variables namely the earth pressure within a prediction horizon. Subsequently, the quadratic objective function is obtained based on the prediction model, aiming at minimizing the difference between the predicted earth pressure and the desired one. Due to its characteristics of nonlinearity, nonconvex, and constraint, the improved ant colony system (ACS) algorithm is introduced to solve a finite horizon optimal problem, and then an optimal control sequence of the screw conveyor speed and advance speed are obtained. At last, the simulation experiments of the validity of the method are carried out.
Control mechanism of EPB
The EPB shield machine mainly consists of shield body, cutter head, hydraulic jack, screw conveyor, segment erector and so on, as shown in Figure 1. During tunneling process, shield machine is pushed by hydraulic jacks, and the cutterhead cut the soil. Then the soil fills the entire space of pressure chamber and screw conveyor. The soil-in-soil chamber provides the supported pressure to balance the water and soil pressure on excavation face, as shown in left diagram of Figure 1. In the mean time, with the increment of the cut soil, screw conveyor will discharge it so that the excavation face can be kept balance and avoid ground deformation.
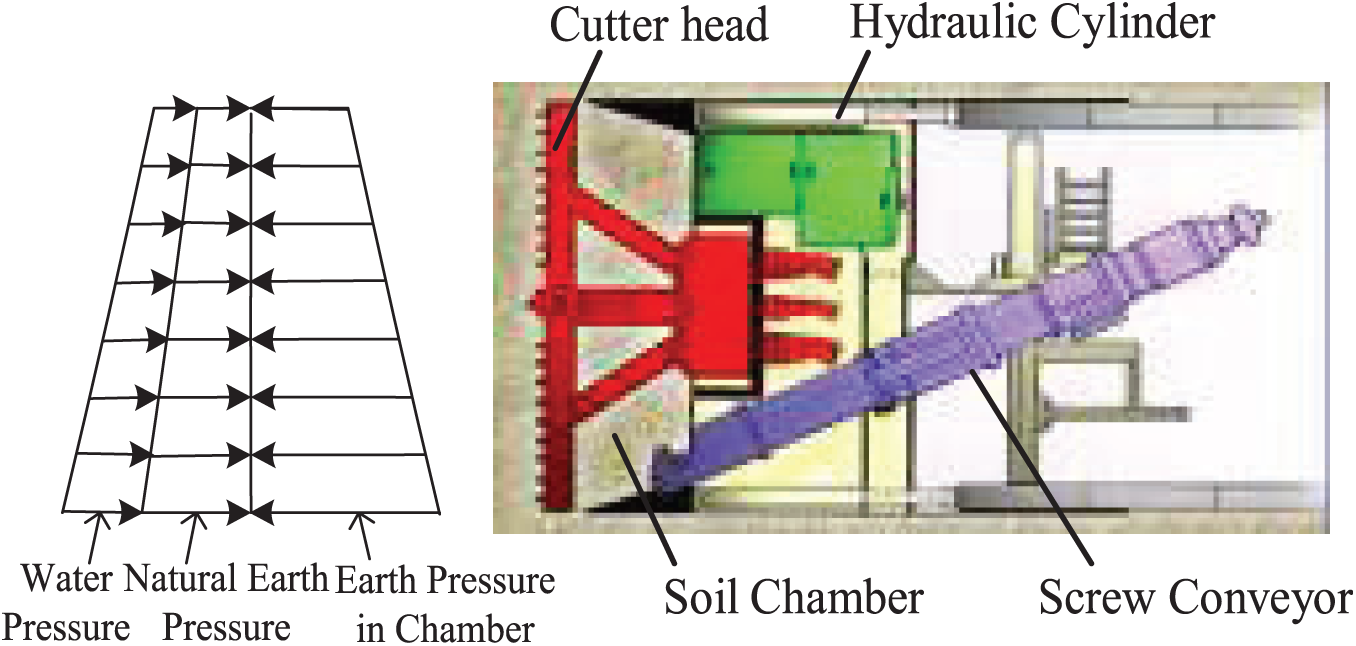
The working principle and structure of shield machine.
The earth pressure in chamber is mainly influenced by advance speed, screw conveyor rotational speed, total thrust and cutter speed. However, in practical engineering, we usually control the screw conveyor speed or advance speed to keep the EPB. In order to control EPB in chamber better and prevent ground deformation, in this paper, an LS-SVM model-based multiple-variable predictive control strategy is employed to control the screw conveyor speed and advance speed simultaneously. The control algorithm is mainly composed of prediction model, reference trajectory, feedback correction, and rolling optimization. In this approach, an LS-SVM model is established, which is used to predict the earth pressure in chamber over the specified prediction horizon. Then the cost function is established, and a numerical optimization routine is performed which attempts to minimize the difference between the desired earth pressure and the predicted one. Then, an optimal control sequence is obtained by solving a finite horizon open-loop optimal control problem through the improved ant colony optimization algorithm. Finally, the optimal screw conveyor speed and advance speed are implemented at each sampling instant.
LS-SVM regression
Given a training data set of
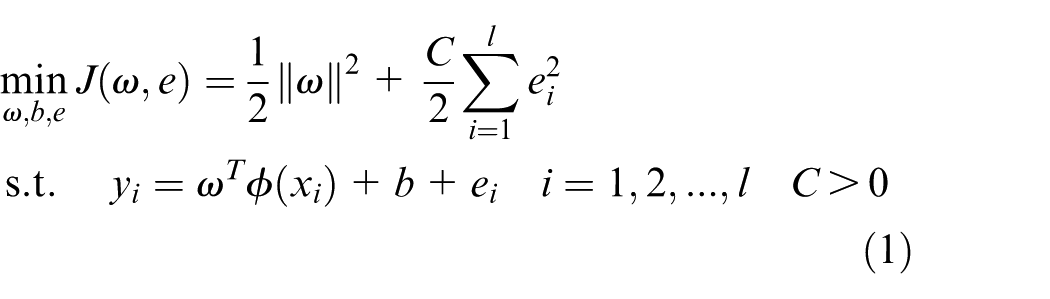
where
To solve this optimization problem, its corresponding Lagrange function is given by
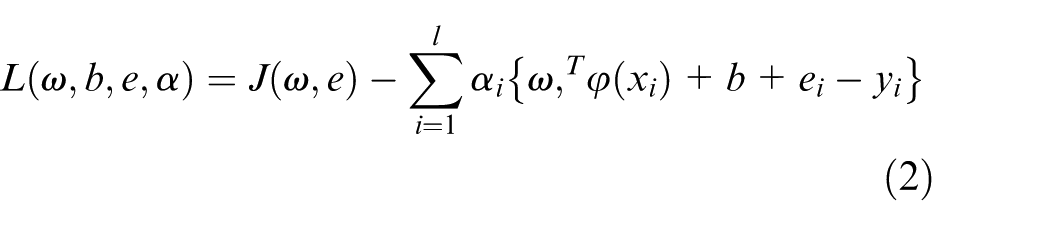
where
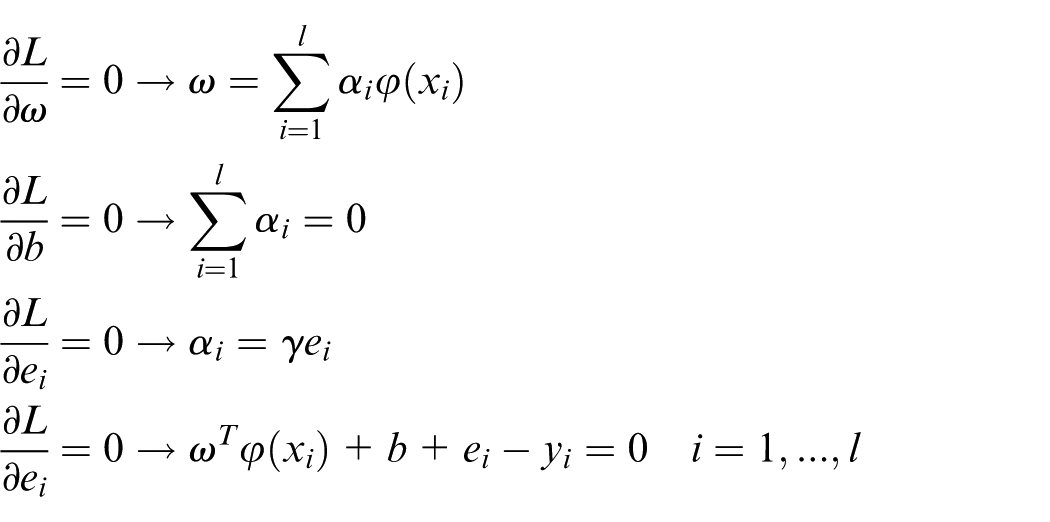
The solution is obtained after elimination of

where

Model predictive control strategy for EPB in chamber
LS-SVM prediction model of earth pressure
An LS-SVM model is established to predict the earth pressure in soil chamber several steps in future over the prediction horizon. In order to reflect the practical process more accurately, the main factors affecting the earth pressure in chamber are considered as input variables for the prediction model, and the output is the earth pressure in chamber. Therefore, the output of the system at time
where
Thus

Take the regression vector and its corresponding earth pressure as the training and testing set
The procedures for establishing the prediction model are as follows:
Step 1: Getting the training set
Step 2: Given the RBF kernel function:
Step 3: The penalty parameter
Step 4: Take the training sample, kernel function, kernel parameters, and structure parameters into LS-SVM and solve the regression function

the root mean square error
Step 5: At next sampling instant, add the new data into the training set
Step 6: Return to step 4.
Reference trajectory and feedback correction
The aim of introducing reference trajectory is to make the system output reach the set point smoothly according to the reference input trajectory which is given beforehand. It is described in an exponential form from current output value as follows

where
Due to the influence of uncertainty, there is difference between the predicted earth pressure and the actual earth pressure. Therefore, the feedback correction is introduced to compensate the predicted earth pressure of the model and reject disturbance. The predicted error at

Then, the predicted output earth pressure after feedback correction over the prediction horizon

where
Rolling optimization by improved ant colony algorithm
The optimization problem of the predictive controller is minimizing the sum of squared errors between the desired reference trajectory and the predicted output earth pressure, with an additional penalty imposed on excessive changes in the manipulated variables. The aim is to derive an optimal control sequence for EPB control. The optimal control sequence is then obtained by solving a finite horizon open-loop dynamic optimization control problem. The objective function of the optimization problem in this predictive control strategy has the form as follows
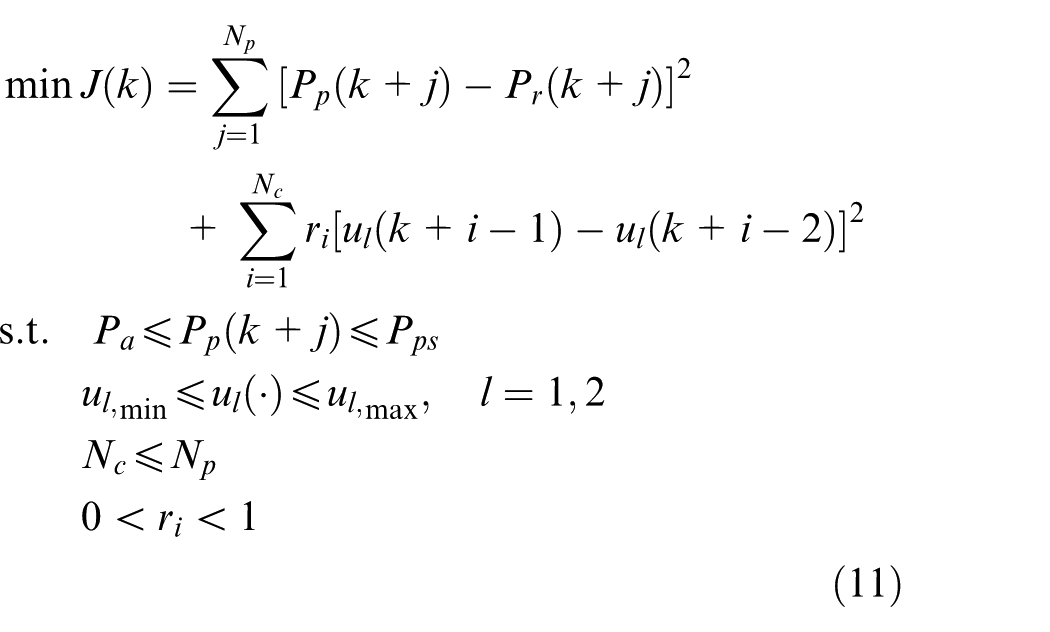
where
Because the optimization function is nonlinear, nonconvex and constrained, it is difficult to solve by conventional numerical optimization method. However, the ant colony algorithm is easily implemented with fewer parameters to adjust, and it is very suitable for solving the complicated nonlinear problems.19,20 In order to get global optimal solution, the ant colony system algorithm is improved to solve the optimization model; in the mean time, to reduce the computation time, the control horizon is taken
The main idea of the improved ACS algorithm in this paper is in each iteration, each ant selects a path independently, which corresponds to a control sequence of the screw conveyor speed and advance speed; substitute them into the prediction model and obtain corresponding predicted output after feedback correction; then substitute them into function (11) to compute the objective function values, based on which update the pheromone; then the algorithm enters next iteration; the iteration is over when all ants converge to the same path or it reaches the maximum iteration times. Finally, find the minimum objective function value which corresponds to the optimal path, therefore, the optimal control sequence of the screw conveyor rotational speed and advance speed are obtained. The specific process for searching the optimal solution is as follows:
Formation of the moving path for ants
In order to use the ACS algorithm conveniently, we express the values of the control sequence on plane

2. Selecting nodes on a moving path
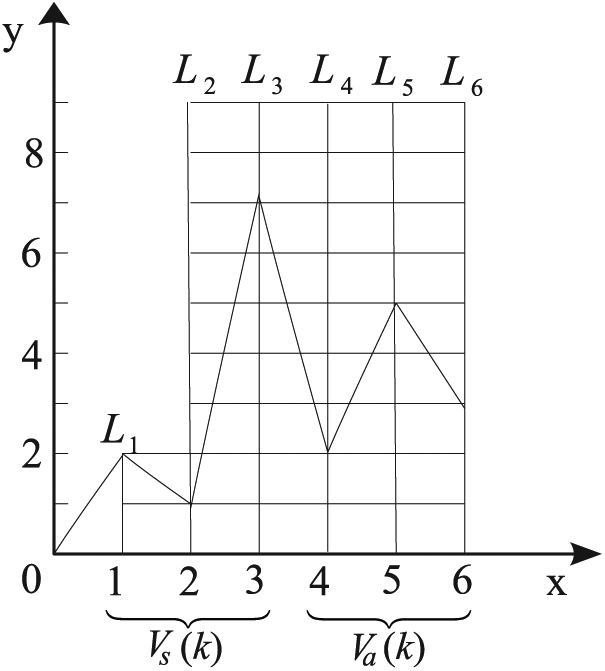
Searching path of the ants.
During the process of constructing a solution, ants select the next node through a stochastic mechanism. Assume the number of ants is


where
The essential feature of the transition condition (14) is that it is chosen as a time-dependent function of the iteration index
3. Updating the pheromone intensity
After n steps, each ant has traversed all lines and completed a cycle. The pheromone intensity of each node on the best tour is updated according to the following formula

where
where Q is a constant,
The procedures of the ACS algorithm used in this paper are summarized as follows:
Step 1: Establish the free solution space for the ant searching the path as Figure 2 and define a one-dimensional array
Step 2: Define the number of ants
Step 3: Set
Step 4: Ant
Step 5: Set
Step 6: Set
Step 7: According to the array
Step 8: For all the
Step 9: Define
Step10: Set each element of
Simulations
Tunneling project
The data used in the simulation experiments were collected from a metro tunnel project in Beijing. The over-burden depth of the tunnel was approximately 22.4 m and the groundwater level was about 8.2 m below the ground surface. The tunnel was excavated by an EPB shield in silty clay, fine sand, and pebbles throughout this site. The data were collected continuously by the automatic measurement system. The data of earth pressure were measured on the upper left of the bulkhead, 1545 mm vertically apart from the horizontal axis and vertical axis, respectively.
Validity of the prediction model
Based on the field measured data, we test the validity of the prediction model. Select 400 sets data samples
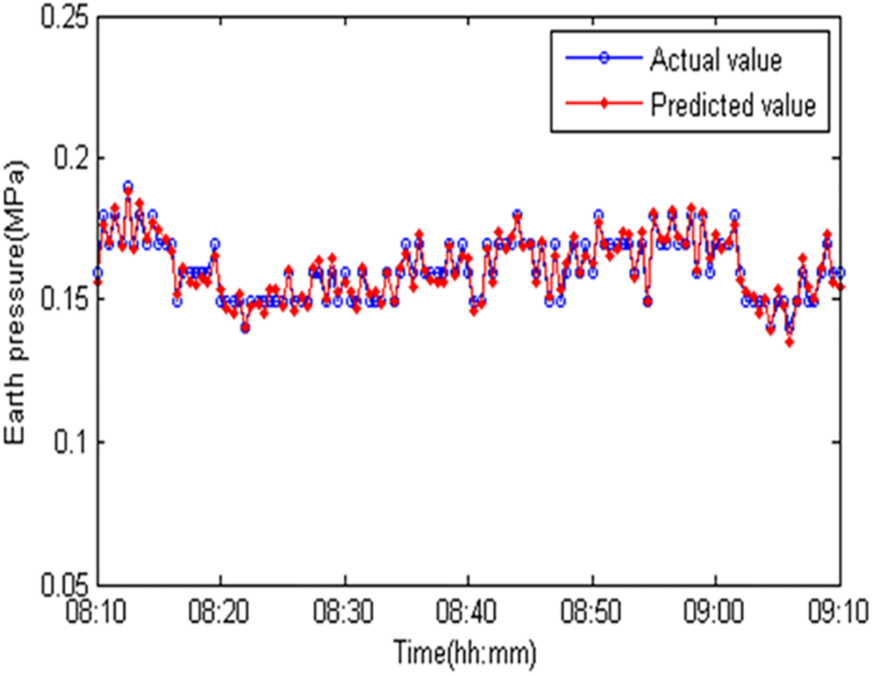
Contrast between actual pressure and predicted one.
As can be seen from Figure 3, the predicted pressure conforms to the actual value on the whole. The maximal predicted error is not beyond 0.0176 MPa, and the RMSE of the predicted pressure due to the prediction model is 0.00695 MPa. These results indicate that the model in this paper has higher forecast accuracy.
Control effect simulation
To test the control effect of the method presented in this paper, the model proposed by Li is taken as controlled plant to carry out the control simulation, which can describe the relationship between the pressure and control parameters during shield tunneling.
18
For the MPC used in this research, in order to find a set of suitable control parameters, a number of simulations have been tried, and suitable control parameters for set-point tracking are chosen as prediction horizon
After rolling optimization by ACS algorithm, the control sequences of
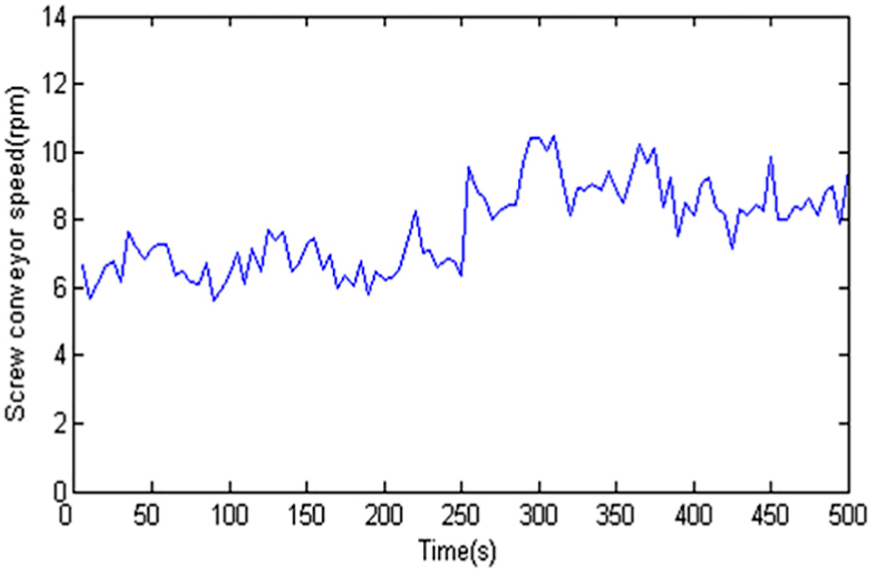
The optimized screw conveyor speed.
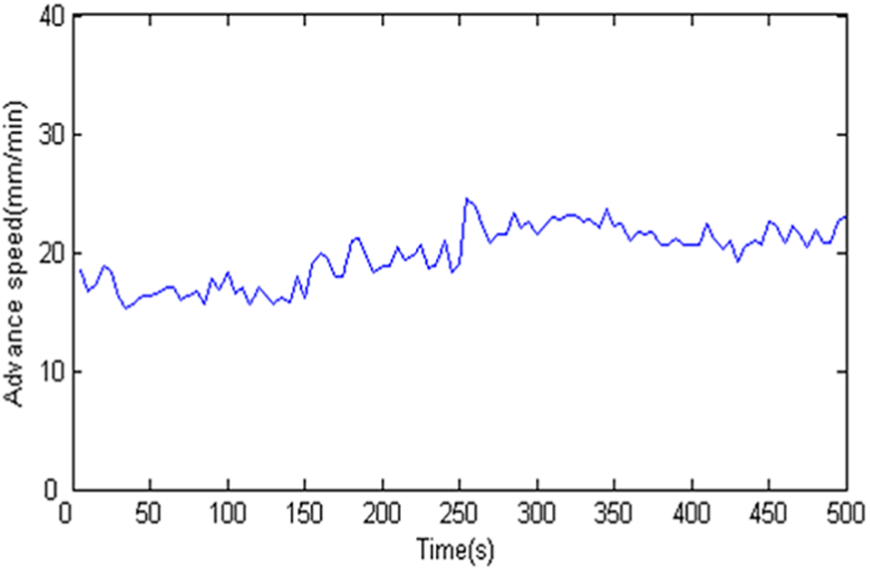
The optimized advance speed.
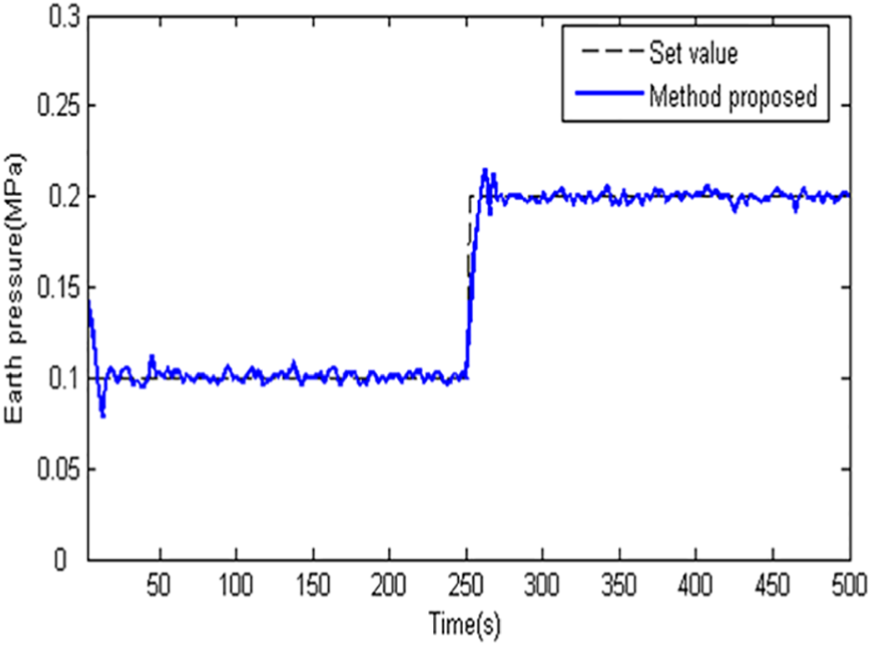
Control effect of the method proposed.
From Figures 4 and 5, we can see that there is a little change in screw conveyor and advance speed when the geological condition is changed at 250 s because the working condition and the change of control parameters are very complex. As can be seen from Figure 6, the earth pressure in chamber is controlled near the desired pressure better, which demonstrates the controller has better tracking control performance. The output response changes are steady with small over shoot, and importantly, the control process does not exhibit notable oscillations at any set points. Only when the geology condition changed at 250 s, there is a little delayed response of the pressure control which is because that the LS-SVM prediction model needs to be updated and trained on line. With respect to the entire control process, the satisfactory performance is owing to the full representation of the nonlinear dynamics of the tunneling process by the LS-SVM model and the rolling optimization by ACS algorithm.
Conclusion
To keep the excavation face balance better during tunneling process, an LS-SVM model-based predictive control scheme for EPB in chamber is developed. A prediction model is established for the earth pressure in chamber by means of LS-SVM technology. The model obtained by this way is found to have good generalization property and higher accuracy. It lays the important foundation of implementing the MPC. The optimal control algorithm shows that the control performances are quite satisfactory with respect to the reference tracking ability, steady-state accuracy, amplitude of overshooting, and consideration of constraints. Therefore, the control strategy presented in this paper is very effective to control EPB and it can be applied to practical shield tunnel engineering.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
Project (61773190) supported by the National Natural Science Foundation of China; Project (201501104) supported by the PhD Start-up Fund of Science and Technology Department of Liaoning Province, China.