
Abstract
In this paper, we consider the cooperative adaptive cruise control problem of connected autonomous vehicles networked by heterogeneous wireless channel transmission. The cooperative adaptive cruise control model with variable input delays is established to describe the varying time-delays induced from vehicular actuators and heterogeneous channel transmission. Then a set of decentralized time-delay feedback cooperative adaptive cruise control controllers is computed in such way that each vehicle evaluates its own adaptive cruise control strategy using only neighborhood information. In order to establish string stability of the connected vehicle platoon with the decentralized controllers, the sufficient conditions are obtained in the form of linear matrix inequalities. The scenarios, consisting of four different cars with three heterogeneous wireless channels, are used to demonstrate the effectiveness of the presented method.
Keywords
Introduction
In recent years, increasing traffic congestion exacerbates such problems as drivers’ workload, environment pollution, waste of energy and so on.1,2 Much efforts have been devoted to autonomous highway/vehicle system to lessen these problems. Adaptive cruise control (ACC) is the earliest autonomous vehicle system. The most wildly used ACC is the proportional–derivative control system and the intelligent driver model system, which keep a desired inter-vehicle distance to the preceding vehicle with some constant speeds using the measurement of captors such as radar or laser.3–5 Since ACC primarily aims to enhancing driving comfort, a relative large inter-vehicle space is necessary to avoid rear-end collision and hence the fuel consumption and emissions increase.
By vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) wireless communications, vehicles are capable of communicating with other ones and make up a connected vehicle system. In such system, cooperative adaptive cruise control (CACC) has been presented to ensure safe car-following using distance and/or speed measurements and state information transmitted among vehicles via V2X.6,7 Specially, it has been shown that CACC allows for a smaller inter-vehicle distance than the conventional ACC and hence less fuel is consumed to keep a safe space and effectively raises road capability.8–10 Also, by sharing information of the preceding vehicle in real-time, the host vehicles can alter their driving behaviors to reduce the drivers’ workload and to avoid the rear-end accidents. 5
The basic requirement of CACC is to attenuate fluctuations along vehicle strings, which is characterized by the concept of string stability. There are many approaches to design CACC controllers to obtain string stability of connected vehicle systems. For instance, Guo and Yue,11,12 established string stability of a connected vehicle system with ranged-limited sensors by the linear matrix inequality (LMI) method. By delayed acceleration feedback, Ge and Orosz 13 achieved string stability of connected vehicle systems with actuators’ time-delay by analyzing the dynamics of the system. In previous works,14,15 the sliding-model control approach was used to ensure speed consensus of connected vehicle platoons. Moreover, the model predictive control method was employed to solve constrained CACC problems of connected vehicle systems.6,16–19
Many research works on string stability have considered the affects of homogeneous wireless communication on connected vehicle systems with identical vehicles.15–20 Nevertheless, heterogeneous wireless communication is often encountered in practice, where wireless channels have different transmitting properties (e.g. communication delays, fading channels) as well as different vehicular dynamics prosperities. In fact, the heterogeneous feature of channels leads to different fading channels and arbitrary time-varying delays of V2X wireless transmission due to switching channels when the connected vehicle string are running with high speeds. It is well known that the time-varying delays and fading communication degrade the performance of CACC and hence damage safe driving and string stability of the connected vehicle system. Hence, it is necessary to consider the affects of heterogeneous wireless channels on string stability of the connected vehicle system with different vehicles.
CACC can be exploited in different safe spacing strategies in order to adjust vehicular speed and spacing to improve fuel economy, ride comfort and avoid collisions. The most commonly used strategy is invariant headway time one, where inter-vehicle distance is independent of the speed of the host vehicles. Here, we use time-invariant headway time strategy as the vehicles’ spacing is constant for uniform speed. However, in this case, the condition guaranteed that string stability of the connected vehicle system is more stringent because of heterogeneous and/or non-uniform communications. 21
The aforementioned problems lead to the objectives of this contribution. Here, we are interested in developing a CACC method for connected vehicle systems by taking account of heterogeneous wireless channel transmission and different vehicular actuator delays. The tracking model with variable input delays is used to describe the time-varying delays induced by heterogeneous channels and actuators. Then an LMI-based systematic approach is proposed to design a set of ACC controllers for the connected vehicles with guaranteed string stability and zero steady-state spacing error. The presented CACC is decentralized in nature as each vehicle computes its own strategy using only neighborhood information. Some LMI conditions are obtained to guarantee string stability and zero steady-state spacing error of the connected vehicle system. A representative scenario is used to demonstrate effectiveness of the presented method, where four cars with different driving abilities are connected by three heterogeneous wireless channels transmission.
CACC models for connected vehicles
Consider a CACC system of connected vehicles by heterogeneous wireless channel transmission. In this system, the vehicles are assumed to run in horizontal environment. Safe inter-vehicle distance is set as δd > 0 and length of each vehicle is denoted by Li > 0. Let the ith (i = 0, 1, …, N) vehicle’s absolute position, velocity and acceleration be denoted by zi, vi and ai, where i = 0 stands for the leading vehicle. Here, the leader delivers periodically its states to the host vehicles through the heterogeneous wireless communication network consisting of n (1 < n <∞) wireless channels (see Figure 1).
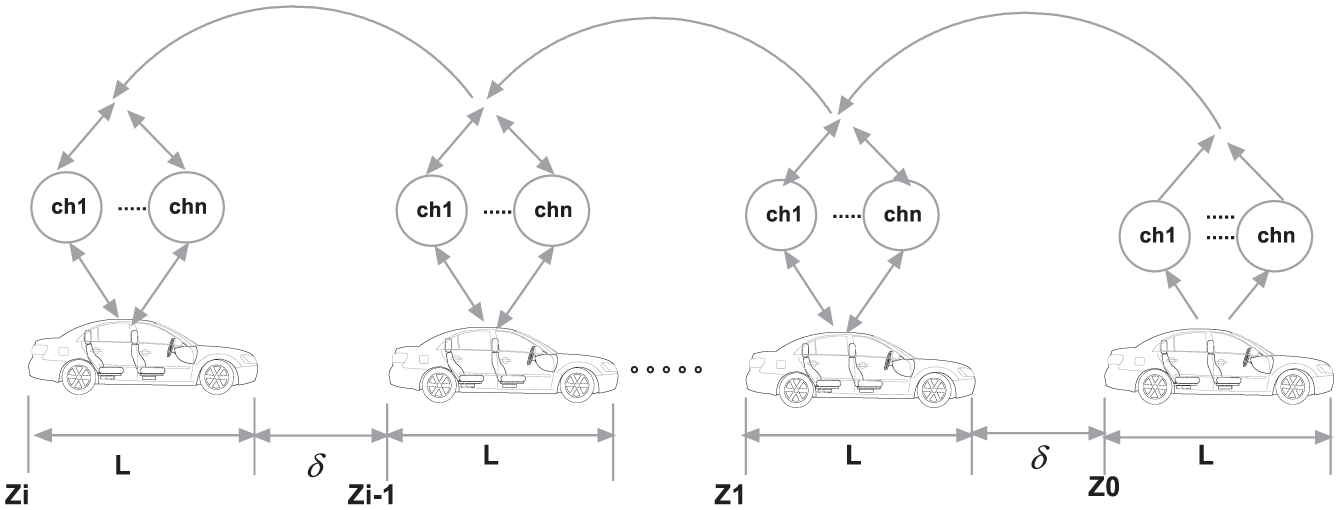
A cruise system schematic of connected vehicles by heterogeneous wireless channel transmission.
From Newton’s second law, the speed and acceleration errors of adjacent vehicles are expressed as, respectively, follows

where time t > 0 and δi = zi-1−zi−Li−δd is the space error with respect to δd for i = 1, …, N. Here, the vehicular throttle and braking pedal units are assumed to have desired dynamics. We use the following representation to formulate the longitudinal acceleration of the host vehicles

where number ςi represents a parameter characterizing the internal actuator dynamics and ûi is the desired acceleration for the ith vehicle. This model has been widely exploited in the literature to design and analyze cooperative ACC systems.10,11 However, a more realistic dynamics of the acceleration should include actuating delays in order to account for the throttle and braking delays. Here, we extend this model with an additional time-varying actuator delay (τa(t) > 0) between the acceleration command (ui) and the desired acceleration

where τi, a is the varying delay of the ith vehicular actuators. Clearly there exist an upper bound
We select the state vector of the ith vehicular cruise system as

where di is the desired acceleration ûi−1 of the preceding vehicle and matrices

with i = 1, …, N. Note that the desired acceleration of the preceding vehicle is not easy to be obtained accurately by the host car and the time-derivative of a0 is omitted as the leader is assumed to run at a constant speed. Moreover, in heterogeneous wireless communication network, the states of the CACC system (4) are packed to be shared by V2X communication. Then the output variable is defined as follows

where Ci > 0 is the channel gain matrix for i = 1, …, N. Note that considering the fading channels of V2X communication, the gain satisfies that 0 < Ci ≤ 1 for i = 1, …, N.
In V2X communication, there generally exists a transmission delay (τc) of magnitude 0.1–0.4 s due to intermittencies and packet drops.
11
Moreover, in the context of heterogeneous wireless channels, the time delay is often different for different wireless transmission channels, that is,

where

with i = 1, …, N and j = 1, …, n.
The goal of the paper is to develop the time-delay feedback CACC method of connected vehicle systems by heterogeneous wireless channel transmission. The set of controllers is required to drive its host vehicles to follow the preceding vehicle by maintaining δd in the face of varying delays induced by actuators and heterogeneous channels while guaranteeing string stability of the platoon system. Here, we use model (7) and the LMI approach 22 to meet the goal.
Time-delay CACC for connected vehicles
Considering the output equation (7) of the ith car, we have

Note that the channel gain Ci > 0 for i = 1, …, N, the transformation (8) is true for all times. Substituting equation (8) into equation (7), we obtain the equivalent cruise system representation

where matrices

Consequently, the CACC system (7) with delays from actuators and channels can be equally transformed the model with only variable input delays.
Since the desired acceleration of the preceding vehicle is hard to be obtained accurately by the host car, here we use the nominal model of equation (9) to design CACC. Let

for i = 1, …, N. Note that the nominal system may lead to some conservativeness of the CACC controllers with respect to the desired acceleration of the preceding vehicle. From equation (10), we have the state-space model of the whole CACC system as follows
Considering equation (10), we define the state feedback law as the CACC policy of the ith host vehicle

where ki is the control gain of the ith host vehicle for i = 1, …, N. Clearly, the CACC controller (12) of the ith host vehicle is determined only by the driving information of its preceding vehicle. Note that the equal transformation (8) implies that the states xi and the outputs yi have the same convergence conditions.
In order to compute the gain ki of the CACC controller in equation (12) of the ith vehicle, we consider its dynamics (10) and a sufficiently small number gi > 0. At time t, let σ1 = gi and σ2 =τi(t). From the Newton–Leibniz formula, we have

Then for some matrices Mmn (m = 1, 2 and n = 1, 2) with some proper dimensions, it is derived from equation (13) that
Moreover, for some matrices Xmn and Ymn (m = 1, …, 3 and n = 1, …, 3) with proper dimensions, we have
where
Since the CACC system (10) has time-delays from actuators and channels, we select the following Lyapunov–Krasovskii functional for equation (10) in closed-loop with equation (12)
where positive definite weighted matrices Pi > 0, Qi > 0, Ri,1 > 0 and Ri,2 > 0 will be computed to determine the gain ki of equation (12). To this end, we have the time derivative of Vi(t) along the trajectories of the closed-loop systems (10) and (12)
Note that

for any 0 <θ ≤ σl. Moreover, combining equations (18) and (14) yields
where
To establish monotonous diminishing of the time derivative of Vi(t) to guarantee stability of the ith vehicle cruise control system, we substitute equations (18) and (19) into equation (17) to derive that

where
In order to guarantee the inequality (20), we consider the following matrix inequality
Applying the Schur complement to equation (22), the inequality (20) satisfies that
However, the inequalities (22) are nonlinear due to the nonlinearities from Ri,1 and Ri,2. It is not easy to solve these inequalities. Hence, in order to obtain the gain ki, we now select the matrices

and we have

Let
where
where
In other words, the decentralized CACC laws in equation (12) are computed by solving the LMIs (25) which drive the host vehicles to converge to their preceding one by maintaining the expected safety space in the face of varying delays induced by the actuator and heterogeneous channel transmission. It is pointed out that a big size of LMI will lead to a computational problem of the CACC controller. The size of LMIs will increase when increasing the number of cars in the connected vehicle system. One of methods to lessen the computational burden of the controller may be to use more efficient numerical algorithms to solve the LMIs via higher level computers.
Remark 1
Note that when a vehicle platoon is running, there are actually some contradictions between maintaining the desired vehicle spacing and the same speed. To balance those contradictions, we defined the spacing error w.r.t. the desired spacing, relative speed and relative acceleration of adjacent cars as the state vector and then established a set of third-order state-space model (4) to represent the dynamics of the CACC system. Clearly, maintaining the desired vehicle spacing and the same speed can be achieved at the same time if the state vector can be stabilized to the origin by a CACC system, which is ensured by the fact that the CACC system in closed-loop with the proposed CACC controller obtained by computing LMIs (25) is asymptotically stable to the origin from the basic results presented in Zhang et al. 22
String stability of connected vehicles
In order to guarantee that the transient spacing errors of adjacent vehicles are not enlarging along vehicle platoons, string stability of the platoon has to be established. In this section, the sufficient conditions of the CACC controllers in equation (12) are presented to establish string stability of the closed-loop vehicle platoon control system with respect to the transient spacing errors.
Let L denote the Laplace operator of a signal of interest and Δ i (s) = L(δi(t)) for i = 1, …, N, with the spacing signal δi for evaluating the string stability property of the vehicle platoon control system. Define the string stability transfer function as Gi(s) = Δ i (s)/Δi−1(s) for all i = 1, …, N and s∈C. Then from Guo and Yue, 11 the vehicle platoon control system has string stability if Gi(s) satisfies ||Gi(jw)|| ≤ 1 for all i = 1, …, N and w ≥ 0, where ||·|| is the 2-norm.
Theorem 1
Consider the vehicle platoon control system (10) with the CACC controllers in equation (12). The transfer function Gi(s) satisfies that ||Gi(jw)|| ≤ 1 if the following inequalities


hold for all i = 1, …, N and w ≥ 0.
Proof
For simplicity, let the CACC gain ki =[ki,1ki,2ki,3]. Taking Laplace transform of longitudinal acceleration models (2) and (3), we have

Since
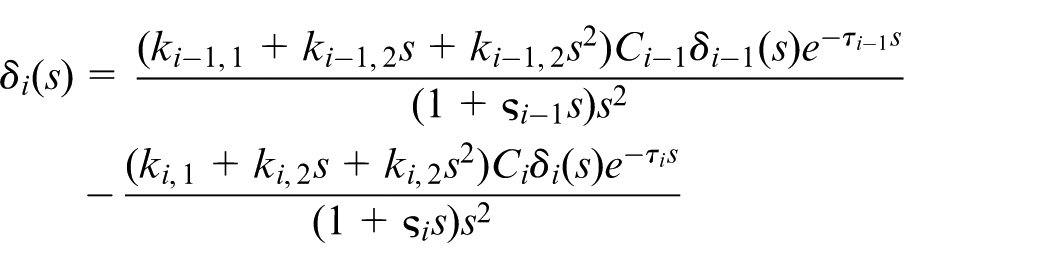
Then the transfer function Gi(s) is derived as follows
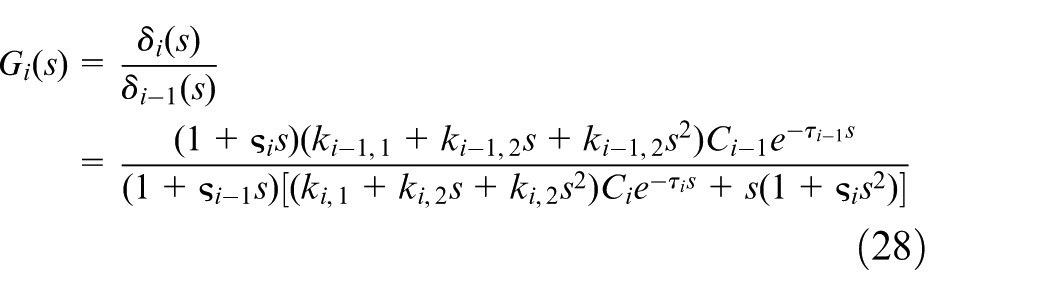
In order to obtain the conditions to guarantee string stability of the platoon control system (10), we use Euler formula to expand ejw = cos(τw) + jsin(τw). Substituting s = jw with w > 0 into equation (28), we have analog of equation (28) in the frequency domain

where
Taking 2-norm of equation (29), we have

where

Clearly,α > 0. Hence, to derive the inequality ||Gi(jw)|| ≤ 1 for any w ≥ 0, we only need to test the condition ofβ > 0.
Consider the fact from Guo and Yue 11 that sin(τw) ≤ τw ≤ 1 and cos(τw) ≤ 1 for any w > 0. Substituting the inequalities (26) to β, it is tested thatβ > 0 for any w > 0. Consequently, we have ||Gi(jw)|| ≤ 1 for any w ≥ 0 and all i = 1, …, N. This completes the proof. ▪
The result of Theorem 1 shows that the vehicle platoon control system with the CACC controllers (12) has the string stability property in the vehicular network of heterogeneous wireless channel transmission. The property ensures that there is no vehicle with collision and dropping out the whole platoon. Note that in principle string stability of connected vehicle platoons obtained here is independent of the number of cars in the platoon. However, increasing the number of vehicles in the platoon raises the size of the LMIs in equation (25), which may lead to a computational problem of the CACC controller.
Simulation results
The simulation scenario considered here is a single lane road and consists of four connected vehicles by three heterogeneous wireless channels, that is, N = 4 and n = 3. In our approach, each host vehicle implements an ACC controller that is computed by the LMI software package in MATLAB R2014a. The goal of the ACC controllers is that each host vehicle avoids collision with other vehicles and tracking its immediately preceding vehicle by maintaining the desired safety space in the presence of varying delays induced by its actuator and the heterogeneous channel transmission.
In this case study, the vehicles’ parameters are selected as Li = 4 m for i = 0, 1, 2, 3, ς0 = 0.25 s, ς1 = 0.2 s, ς2 = 0.3 s, ς3 = 0.15 s, and
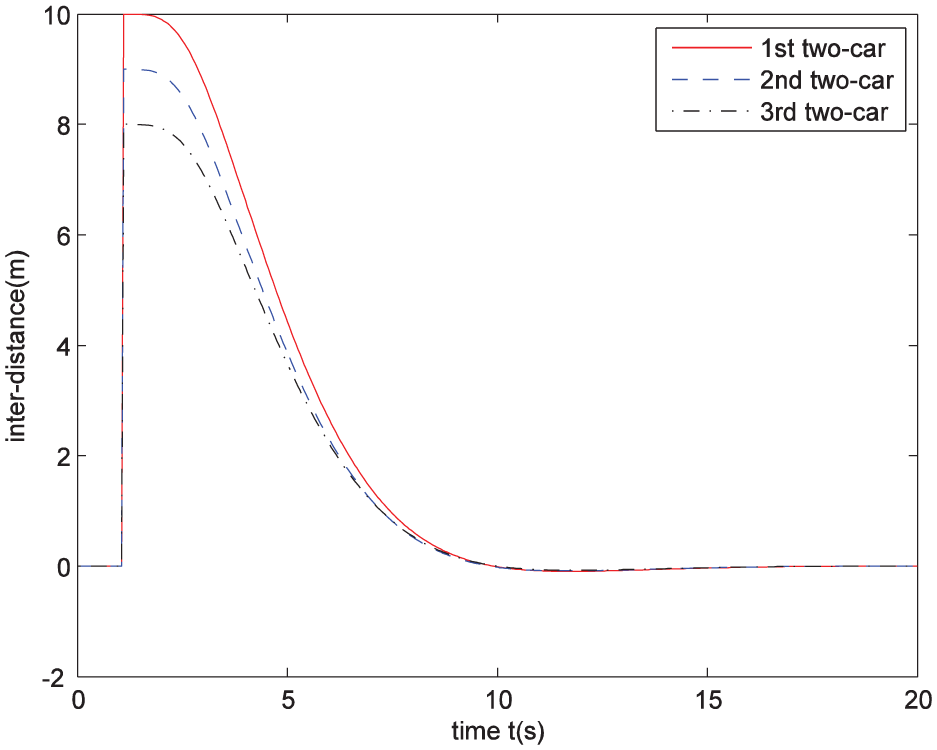
Profiles of the inter-distance errors.
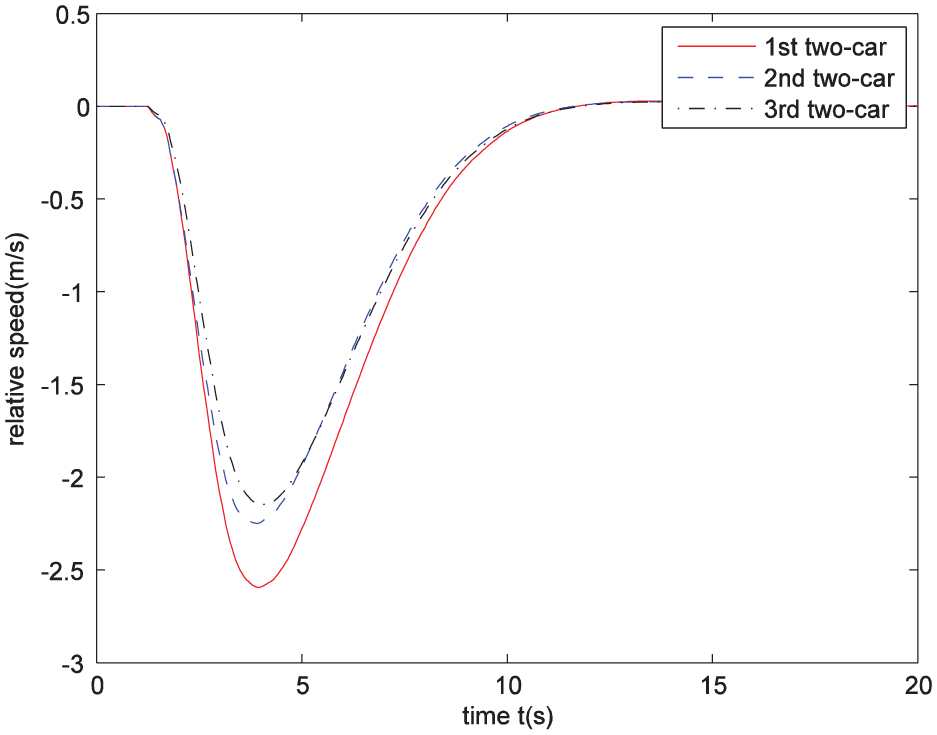
Profiles of the relative speeds.
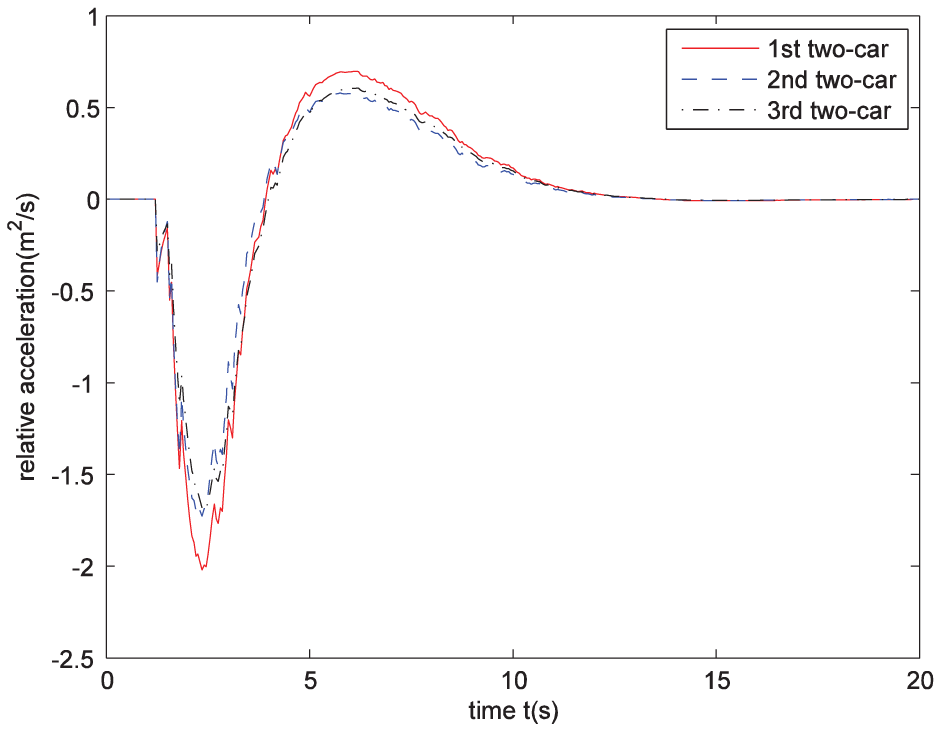
Profiles of the relative accelerations.
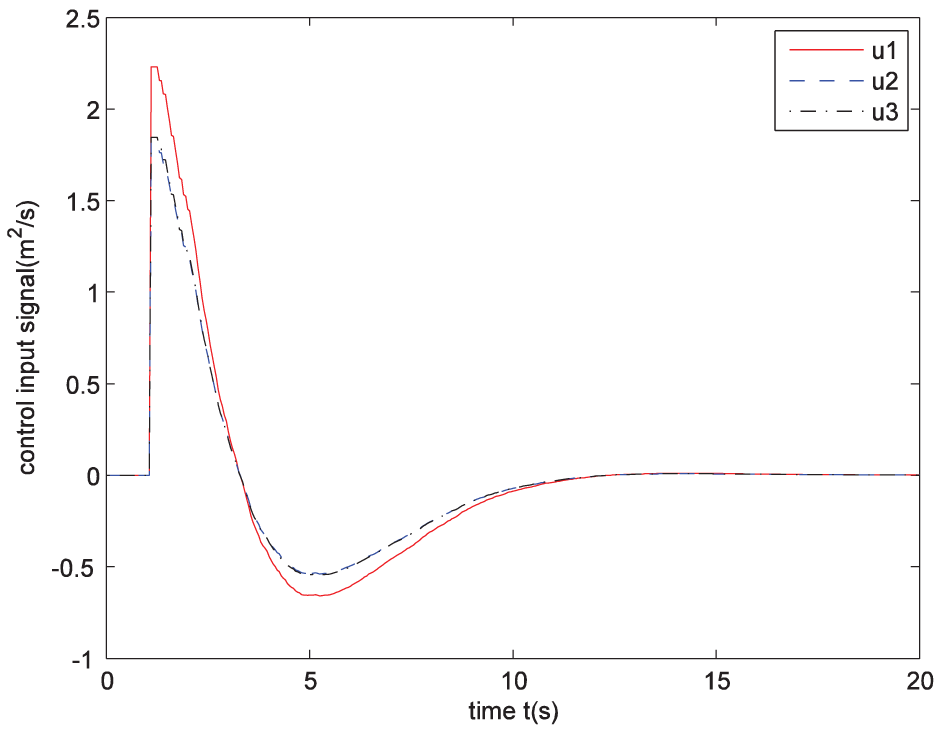
Profiles of the control inputs.
From Figures 2–5, one can see that the trajectories of all vehicles can quickly converge in the face of varying delays induced by the actuators and heterogeneous channel transmission. In other words, each host vehicle has the ability to track its immediately preceding one and maintain the inter-distance at the desired space as well as ensuring a consensus speed of all vehicles. These results demonstrate the effectiveness of the presented method. From the transient plots in Figures 2–3 and 6, it can be further observed that the host vehicles driven by the proposed ACC controller satisfy the predecessor follower string stability property from the viewpoints of the inter-vehicle distance and speed variables. This implies that the proposed ACC method has the ability to attenuate vehicle space and velocity fluctuations coming from the vehicles in front. This ability is beneficial to improve and maintain smooth traffic flow of roads. It is remarked that human drivers usually rely on inter-vehicle distance and speed information to be unable to ensure the string stability property due to their reaction time delay. These results further evaluate the performance of the presented ACC method.
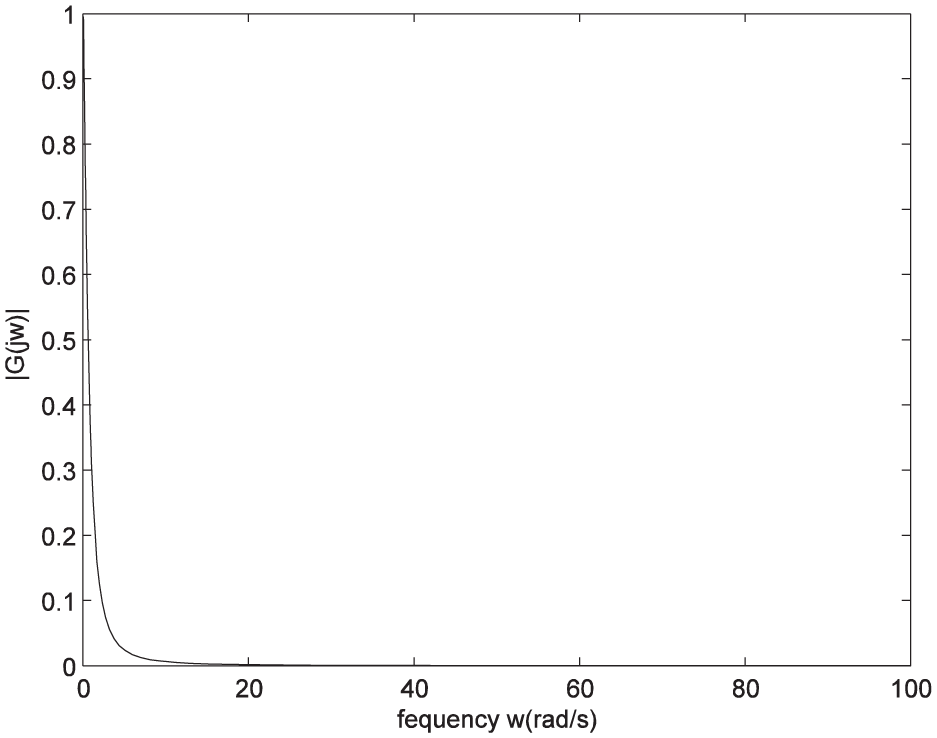
Frequency response for any w > 0.
In what follows, we use the CarSim2016.1 software to further illustrate the results obtained in this paper. The software is a high fidelity simulation environment with an interface for MATLAB/Simulink. The simulation scenarios of four cars are shown in Figure 7. In this software, the selected cars are C class hatchback with front wheel drive, engine power 125 kW, braking system, transmission system, suspension, and so on. The model parameters of these cars are selected as the defaults of the software, but their speeds and accelerations are set according to simulation scenarios. The fading values of the channels and the controllers of the three following cars are followed from those of the aforementioned MATLAB simulation experiments.

CACC simulation diagram of four vehicles in CarSim.
In simulation, the software CarSim outputs the position, speed and acceleration of each car in the platoon to Simulink at each time. Then in Simulink the control input is computed by the three outputs of CarSim. According to the mass of cars in CarSim and the computed control input, the driving force corresponding to the acceleration can be calculated. Then by the default parameters of the vehicular powertrain system and braking system, the throttle opening or the main cylinder pressure output of the brake is calculated and then is output to the car in CarSim. Figures 8–10 show the control results of the four cars in CarSim. One can see from these figures that the connected vehicles can still be safely cruising with a steady-state space of 4 m although the wireless communication channels are fading and have time varying delays. These results are the similar to those of the aforementioned MATLAB simulation experiments and further illustrate the effectiveness of the proposed approach.
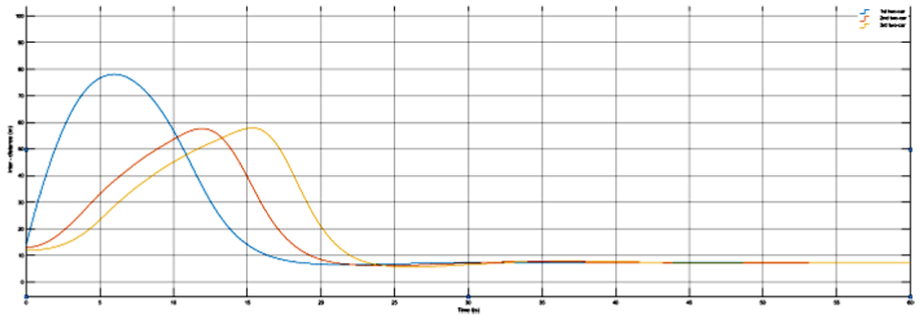
CarSim for relative distance between four vehicles.
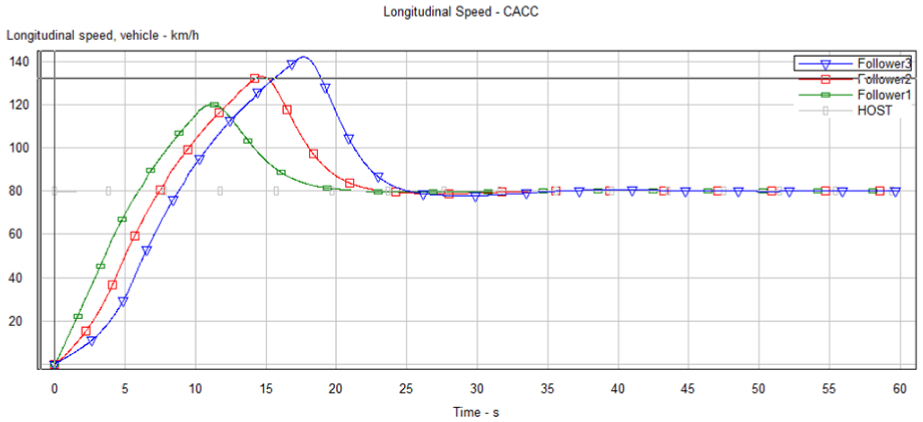
CarSim for absolute speed of four vehicles.
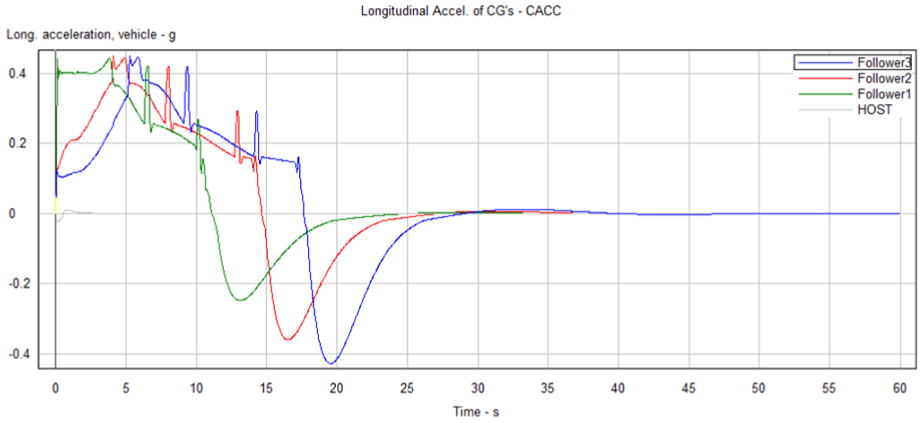
CarSim for absolute accelerations of four vehicles.
Conclusion
In this paper, we presented a new CACC method for time-delay autonomous vehicles connected by heterogeneous channel transmission. Some LMIs are solved to design the CACC controller of the autonomous vehicles. Moreover, the LMI conditions are established to guarantee the asymptotic cruise stability property of the connected vehicles in the presence of varying time-delays induced by the vehicular actuators and the heterogeneous wireless communication channels. The proposed strategy is decentralized in nature since every vehicle calculates its own controller using only neighborhood information. The simulation results demonstrated the effectiveness of the method presented here and certified string stability of the connected vehicles with heterogeneous channel transmission. In the future pursuing work, the CACC problem of connected vehicle systems with multi-objective optimization23–25 as well as following-path determination 26 will be studied by considering heterogeneous channel transmission and the variation of vehicle mass, road grand angle and so on.