In this article, the continuous integral terminal sliding mode control problem for a class of uncertain nonlinear systems is investigated. First of all, based on homogeneous system theory, a global finite-time control law with simple structure is proposed for a chain of integrators. Then, inspired by the proposed finite-time control law, a novel integral terminal sliding mode surface is designed, based on which an integral terminal sliding mode control law is constructed for a class of higher order nonlinear systems subject disturbances. Furthermore, a finite-time disturbance observer-based integral terminal sliding mode control law is proposed, and strict theoretical analysis shows that the composite integral terminal sliding mode control approach can eliminate chattering completely without losing disturbance attenuation ability and performance robustness of integral terminal sliding mode control. Simulation examples are given to illustrate the simplicity of the new design approach and effectiveness.
Sliding mode control (SMC) is a nonlinear control strategy, which usually demonstrates fine robust properties with respect to parameter uncertainties and disturbances.1 SMC has been widely used in many practical systems such as robotic systems,2 spacecraft systems,3 maglev suspension systems,4 mechanical systems,5 and piezoelectric-driven motion system.6,7 The conventional SMC methods could render the linear sliding mode manifold be reached in finite time.
Different to SMC scheme, a nonlinear sliding mode manifold is employed in nonsingular terminal sliding mode control (NTSMC),8,9 which makes that NTSMC not only keeps the main advantages of conventional SMC but also can guarantee that the states trajectories converge to the equilibrium in finite time. Compared to asymptotical stability, besides faster convergence rate, the closed-loop systems under finite-time control (FTC) law usually demonstrate higher accuracy and better disturbance rejection properties.10 In view of these advantages, FTC problems have received a lot of attention recently.11–34 Due to the superior properties of NTSMC, NTSMC has attracted significant interests from the control field.8,9,16,35–37 Recently, based on Bhat and Bernstein,11 NTSMC is developed to a class of higher order nonlinear systems.38,39 Despite NTSMC possesses significant theoretical and practical values, the study of NTSMC for higher order nonlinear systems is still quite underdeveloped, and further research is needed.
This article is devoted to develop a novel NTSMC approach, that is, an integral terminal sliding mode control (ITSMC) approach, for a class of higher order nonlinear systems. More specifically, inspired by Bhat and Bernstein11 and Qian and Li21 and the ITSMC approach in Xu,40 a novel global FTC law is proposed for a chain of integrators based on weighted homogeneity theory41,42 first. Then, based on the proposed FTC law, a novel ITSMC approach is introduced for a class of higher order nonlinear systems subject disturbances (hereafter the disturbances may include parameter uncertainties and external disturbances). Note that the discontinuity of the proposed ITSMC may lead to significant chattering. Although adaptive control has some robust ability and will not bring chattering, it is often ineffective when the considered system subject to strong disturbances43–51 is designed to estimate the disturbances; then a continuous composite ITSMC control law is proposed for the considered nonlinear systems. Within our methodology, it is easy to tune the control law parameters for the desired performances; thus, it is more suitable for practical applications. Simulation examples are carried out to show the validation of the proposed methods.
The outline of this article is as follows. In the “Preliminaries” section, preliminaries are given. The “Main results” section displays the control strategies for higher order nonlinear systems. Finally, concluding remarks are given in the “Conclusion” section.
Notations
Throughout this article, and denote real numbers and n-dimensional Euclidean space, respectively. A function represents that is continuously differentiable on its domain, and . Let be a set, denote the boundary of .
Preliminaries
In this section, we will introduce several useful lemmas, which will be used throughout the article.
Definition 2.1
Weighted homogeneity: For fixed coordinates and real numbers , (a) the dilation , with being called as the weights of the coordinates (for simplicity of notation, we define dilation weight ); (b) a function is said to be homogeneous of degree if there is a real number such that ; (c) a vector field is said to be homogeneous of degree if there is a real number such that for , .21,42,52
Lemma 2.1
Given the trivial solution of system is asymptotically stable, and is continuous and homogeneous of degree with respect to dilation weight .41 Then for any positive integer and any , there exists a homogeneous Lyapunov function of degree with respect to , such that with .
Consider the following chain of integrators
where and are the system state and control input, respectively.
For system (1), based on weighted homogeneity theory42 and the adding a power integrator technique,53 Qian and Li21 proposed an FTC method, while Bhat and Bernstein11 considered FTC design method for system (1) based on geometric homogeneity theory, which can be described by the following two lemmas, respectively.
Lemma 2.2
For any constant , there exists a homogeneous state feedback control law with the form21
where are constants, and
such that the closed-loop systems (1) and (2) are globally finite-time stable.
Remark 2.1
It should be pointed out that due to the nature of adding a power integrator technique, in Lemma 2.2, the control parameters may increase significantly along with the system dimension. Under the control law (2), it is clear that the closed-loop systems (1) and (2) are homogeneous of degree with respect to dilation weights .
Lemma 2.3
Let be such that the polynomial is Hurwitz, then there exists such that, for every , the origin is a globally finite-time stable equilibrium for the system (1) under the feedback control law11
where satisfy
with and .
Remark 2.2
Lemma 2.3 is obtained based on geometric homogeneity theory. Compared to Lemma 2.2, it is easy to choose control parameter , , for control law (4).
Lemma 2.4
Let and be topological spaces with compact and consider the product space . If is an open set of containing the slice of , then contains some tube about , where is a neighborhood of in .54,55
Inspired by Lemmas 2.2 and 2.3, we have the following result for system (1) based on weighted homogeneity theory, Lemmas 2.1 and 2.4, which will be a key role for the main results of this article.
Theorem 1
There exists such that the system (1) can be globally stabilized in finite time under the homogeneous control law
where are the coefficients of Hurwitz polynomial , and , , is defined in equation (3).
Proof
For each , the closed-loop systems (1) and (6) can be described by the following compact form
where denotes the right-hand side continuous vector functions of the closed-loop system. It is easy to show that system (7) is homogeneous with degree with respect to dilation weights .
As , system (7), that is, , is a linear system with the Hurwitz characteristic polynomial . According to Lemma 2.1, there exists a positive definite, radially unbounded homogeneous Lyapunov function such that is continuous and negative definite.
Let and . Then both and are compact sets. Define by , then is a continuous function and satisfies for all , that is, . Note that is compact and is continuous; according Lemma 2.4, there exists a such that . Let , it follows that for , is negative on . Therefore, is strictly positively invariant under for every , and system (7) is globally asymptotically stable.
As , system (7) is homogeneous of degree ; it follows that system (7) is globally finite-time stable.
Remark 2.3
Compared to Lemma 2.2, the advantage of Theorem 1 lies in the following aspects: (a) the structure of the control law (6) is more simpler than that of (2), and (b) it is easier to choose control law parameters. Similar to Lemma 2.3, in Theorem 1, we proved that the control law (6) will steer the states of system (1) to the origin in finite time based on geometric homogeneity.11 It is easy to obtain a homogeneous Lyapunov inequality, that is, the positive constant in is dependent on homogeneous degree.32 Therefore, the disadvantage of Theorem 1 is that one could not provide the convergence time precisely.
Compared to Lemma 2.3, Theorem 1 has the following merits. (a) It is easier to choose parameters for control law (6). Specifically, once are chosen, one only needs to care about how to choose an appropriate parameter by Theorem 1. However there are two parameters need to choose according to Lemma 2.3, that is, one needs to care about how to choose and in Lemma 2.3. (b) In equation (3), once is chosen, it is easier to calculate the power of the control law (6), while according to equation (5), it is more complex to calculate with the increase of the dimension of system (1). (c) Both equations (4) and (6) are homogeneous control laws for system (1); it is clear that the closed-loop systems (1) and (6) are homogeneous of degree with respect to dilation weights , while it is not easy to calculate the homogeneous degree and the dilation of the closed-loop systems (1) and (4) with the increase of dimension of system (1).
The effectiveness of the propose control scheme can be shown by the following numerical example.
Example 1
Consider the following triple integrator system for simulation studies
For comparison studies, both Lemma 2.3 and Theorem 1 are employed in the simulation. According to Lemma 2.3 and Theorem 1, we can design the following two control laws
for system (8), respectively.
To have a fair comparison, we choose the same control gains for control laws (9) and (10). Furthermore, according to Bhat and Bernstein,11 under control law (9), the closed-loop systems (8) and (9) are homogeneous of degree . Here, we choose and such that the closed-loop system is homogeneous of degree under two different control laws (9) and (10). According to Lemma 2.3 and Theorem 1, we obtain that and . The simulation is conducted with . The response curves of the system (8) under the two different control schemes are shown in Figure 1. It can be observed from Figure 1 that both of the two control laws (9) and (10) can stabilize system (8) rapidly.
Responses of system (8) under control laws (9) (the dotted line) and (10) (the solid line). (a) The response curve of the state ; (b) The response curve of the state ; (c) The response curve of the state ; (d) The response curves of the two input signals.
Remark 2.4
In order to guarantee that , Lemma 2.2 and Theorem 2 demand that , and under the control law (6), the closed-loop system is homogeneous of degree . According to Bhat and Bernstein,11 under the control law (4), the closed-loop system is homogeneous of degree with . For the same system (1), if , then we have . Therefore, according to Lemma 2.3, if one choose for control law (4), it cannot stabilize system (1) in finite time. This point of view can be supported by simulation example in Bhat and Bernstein:11 Lemma 2.3 does not guarantee the finite-time stability of the triple integrator system (8) as . This demonstrates that there exists certain corresponding relationship between weighted homogeneity and geometric homogeneity for homogeneous system.
Main results
Consider the following higher order nonlinear system described by
where and are the system state and control input, respectively. is a nonlinear function, and the uncertain term represents disturbance.
Assumption 3.1
The disturbance is bounded, that is, there exists a constant such that .
Due to the appearance of and , all of the three control laws (2), (4), and (6) cannot guarantee the global finite-time stability of system (11) even in the case . As , by using nonsingular terminal sliding mode (NTSM) control method,8 one can design an NTSM control law for system (11), while , this method is invalid. Based on Lemma 2.3, Feng et al.38 and Zong et al.39 proposed ITSMC and NTSMC methods for system (11), respectively; both of the two control strategies can guarantee the global finite-time stability of system (11). Inspired by Theorem 1, and Zong et al.38 and Feng et al.,39 we will introduce an ITSMC method for system (11) in this section.
ITSMC for the higher order system (11)
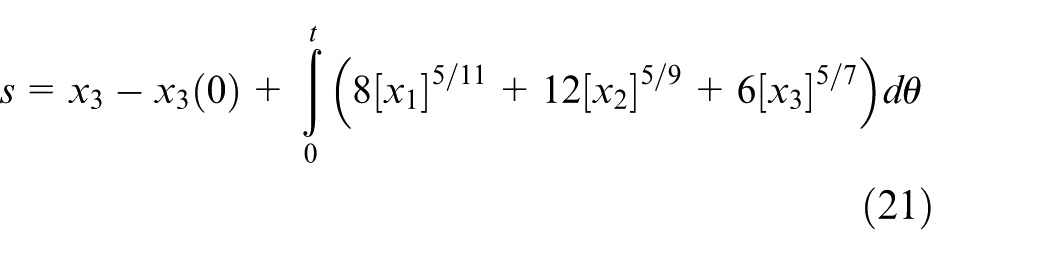
A novel terminal sliding mode surface for system (11) is designed as
where , , is defined in equation (3); is the initial value of ; and are selected such that the polynomial is Hurwitz.
Theorem 2
Consider the higher order nonlinear system (11) with the novel terminal sliding mode surface (12); if Assumption 3.1 holds, then system (11) can be globally stabilized in finite time under the following ITSMC law
where is a constant and satisfies .
Proof
For the integral terminal sliding mode surface (12), the derivative of with respect to time along system (11) is
Substituting control law (13) into equation (14) yields
Consider Lyapunov function . Taking the derivative of along system (11) under control law (13) gives
where . Equation (16) implies that the ideal terminal sliding mode surface can be reached in finite time in spite of uncertainties and disturbances.
The ideal integral terminal sliding mode can be written as
In Theorem 1, it is easy to show that equation (18) is globally finite-time stable. This completes the proof. □
In what follows, a numerical example is given to show the effectiveness of the proposed ITSMC method.
Example 2
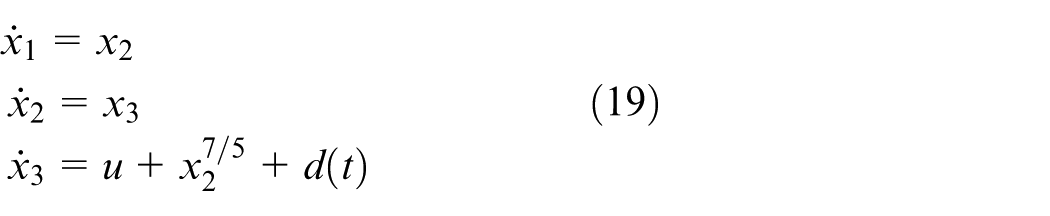
Consider the following system
where .
For system (19), we choose , from which , then we have . We choose and , and initial condition . Obviously, , and Assumption 3.1 holds. According to Theorem 2, the control law can be designed as
where
The responses of closed-loop systems (19) and (20) are shown in Figure 2. Figure 2(a) shows that control law (20) can stabilize system (19) rapidly. However, the discontinuity of control law (20) leads to undesired chattering in the control signal, which can be seen from Figure 2(b).
The responses of the closed-loop systems (19) and (20). (a) The response curves of the states; (b) The response of the input signal.
Remark 3.1
It should be pointed out that if parameter in control law (13) is larger than the upper bound of disturbance (i.e. ), the control law not only can suppress the external disturbances and parameter uncertainties but also can guarantee the states of the closed-loop system that reach the sliding mode in finite time. However, the signum function in control law (13) will bring undesired chattering. To reduce chattering, boundary layer method is usually adopted3,8,56 in the literature. In Yu et al.,9 exponential reaching law is used to take place of constant speed reaching law, that is, is replaced with . However, both of the above two methods can only guarantee the finite-time reachability of the neighborhood of the sliding mode surface when there exist parameter uncertainties and disturbances. Therefore, finite-time stability cannot be guaranteed.
Chattering-free composite ITSMC law design
Finite-time disturbance observer (FTDOB) was first introduced in the study of Levant,57 which has a high efficiency in realizing nonlinear dynamical estimation and has been successfully used in missile guidance systems.58,61 In order to estimate the total disturbance (here, the total disturbance includes parameter uncertainties and external disturbances) by using FTDOB, the following assumption is introduced.
Assumption 3.2
Given , and there exists a constant such that .
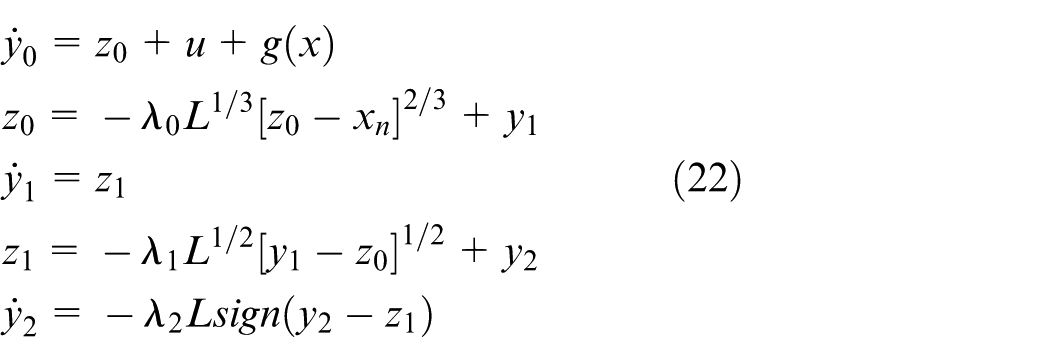
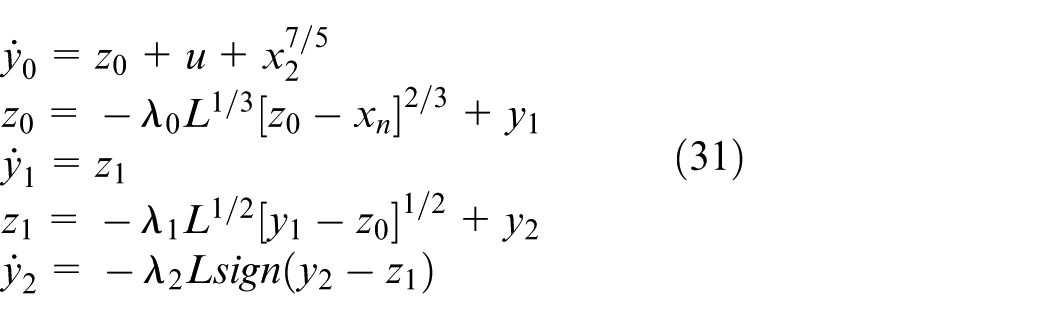
According to Levant57 and Assumption 3.2, we design the following FTDOB for system (11)
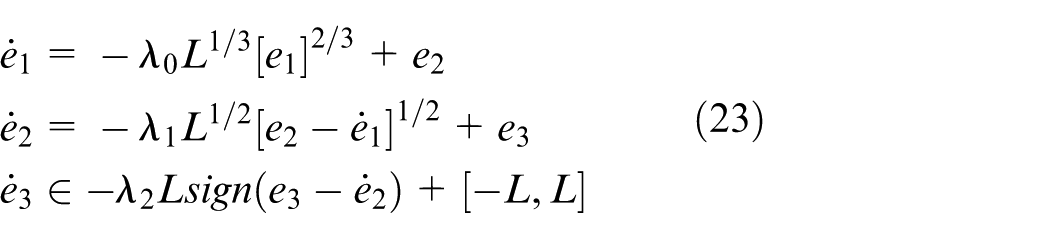
By defining observer errors , it follows from equations (11) and (22) that
where , , and are appropriate positive constants.
Theorem 3
Consider the higher order nonlinear system (11) with the novel terminal sliding mode surface (12); if Assumption 3.2 holds, then system (11) can be globally stabilized in finite time under the following ITSMC law
where and are parameters to be determined.
Proof
The proof of this theorem is divided into two steps: Inspired by Li and Tian,59 first we will show that under the proposed composite control law (24), the states of the closed-loop systems (11) and (24) are bounded in the time interval , where is the convergence time of the observer error system (23). While in the second step, we will show that the closed-loop systems (11) and (24) are globally finite-time stable.
Step I: Taking the derivative of with respect to time along system (11) under control law (24) yields
Substituting control law (24) into system (11) leads to
Consider the following finite-time bounded (FTB) function for system (26)
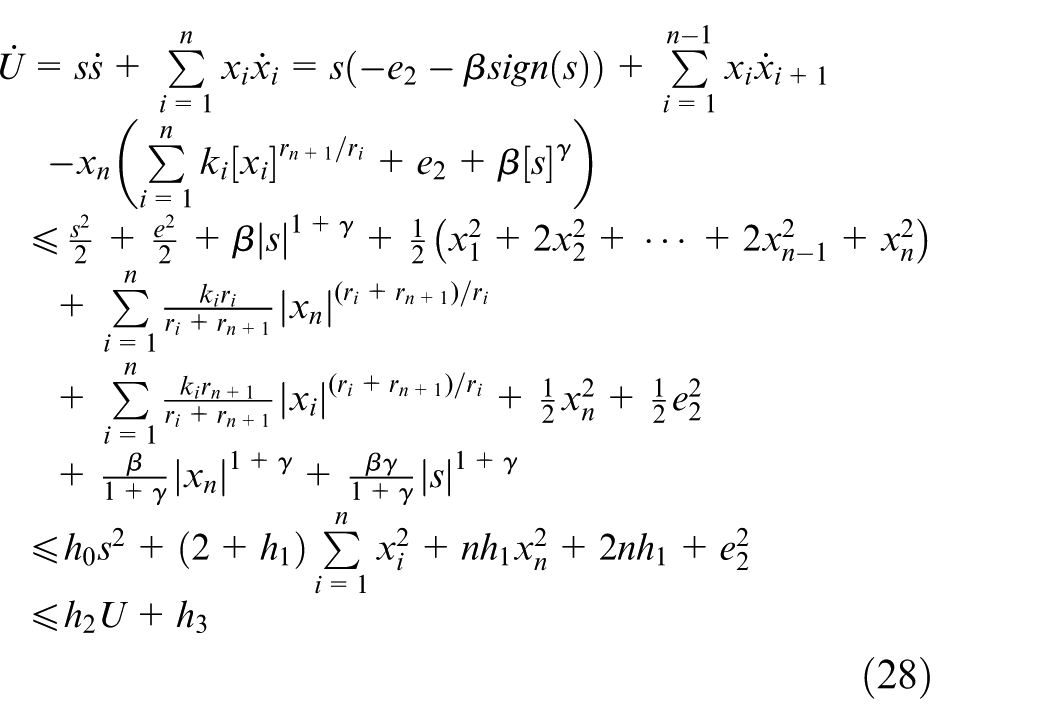
Note that , then we have and . Taking the derivative of along the system (26) yields
where , , , and (in equation (28), the famous Young’s inequality is used repetitively). According to Levant,57 system (23) will converge to the origin in finite time, which implies that are bounded, and then is bounded. It follows from equation (28) and Li and Tian59 that the FTB function are bounded in the time interval ; thus, the states of the closed-loop systems (11) and (24) will not escape to infinity as .
Therefore, under the proposed composite control law (24), the states of the closed-loop systems (11) and (24) will reach in finite time.
On , system (26) reduces to system (18). It is derived from Theorem 1 that equation (18) is finite-time stable. □
Example 3
We still take system (19) as an example to show the effectiveness of the control law (24).
According to equation (22), the following FTDOB is designed for system (19)
Furthermore, in Theorem 3, the following continuous ITSMC is constructed
for system (19).
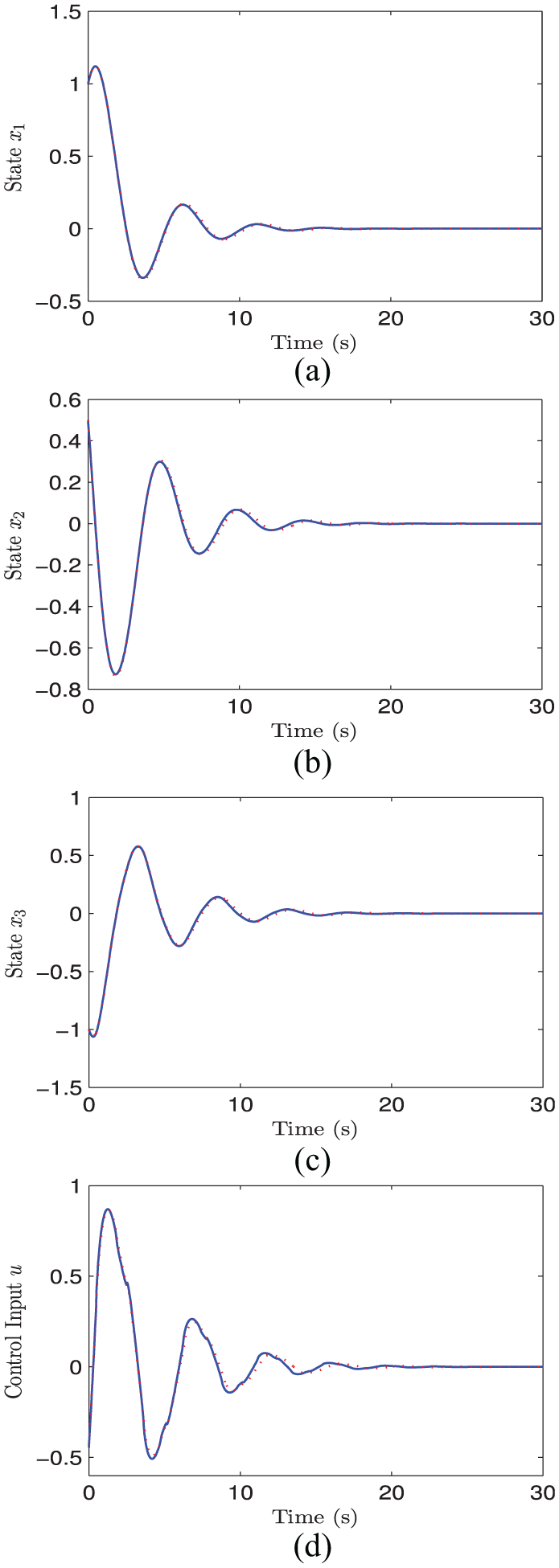
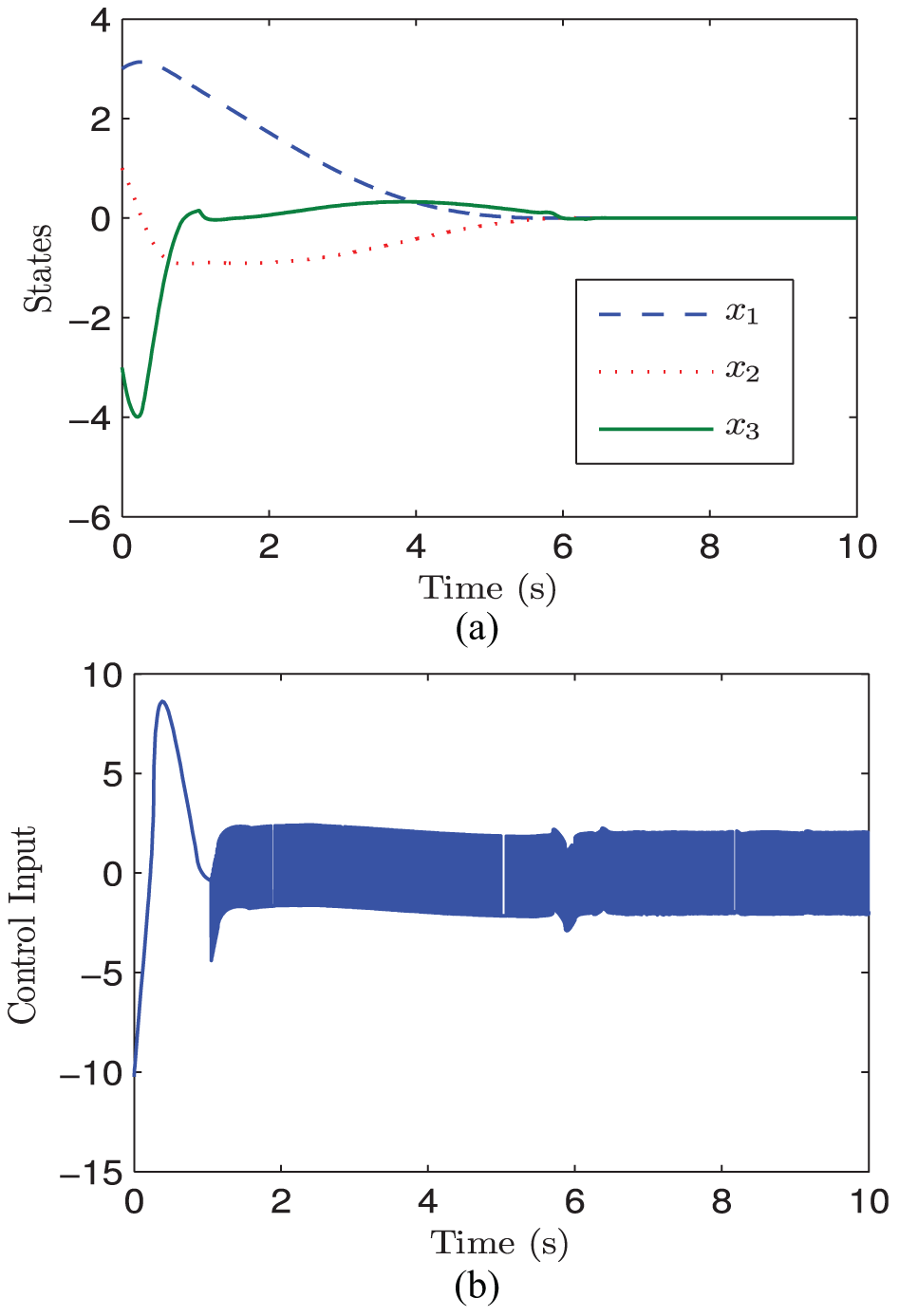
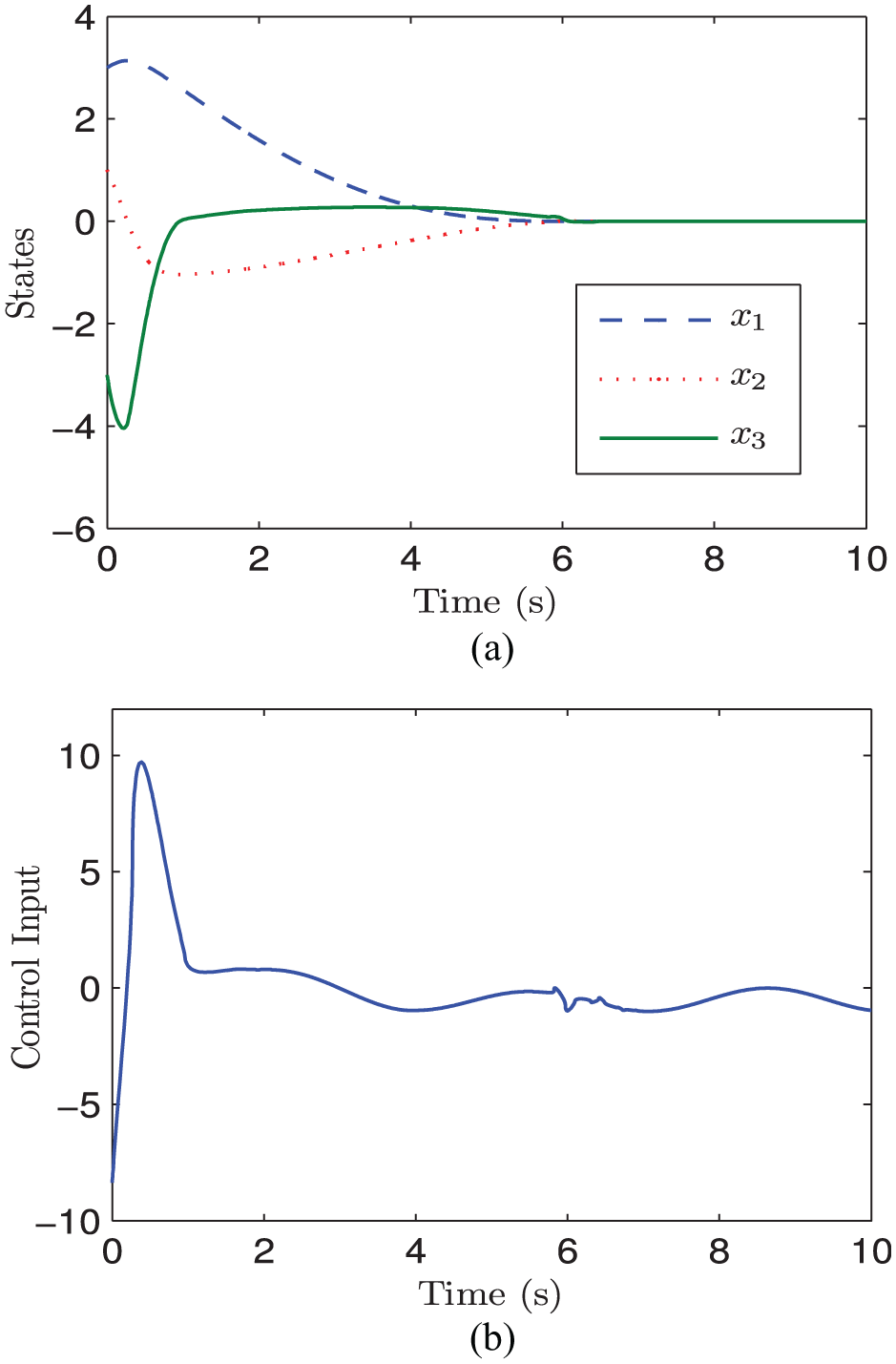
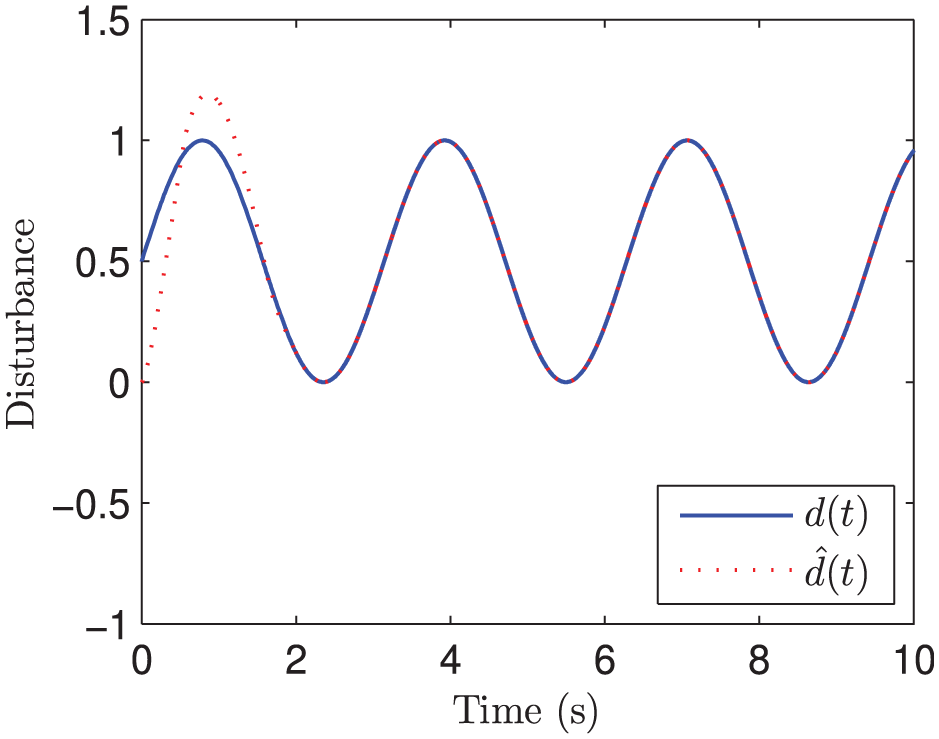
In simulation, we choose parameter values and initial conditions as and . The simulation results are shown in Figures 3 and 4. It can be observed from Figure 3(a) that under the control law (32), the states of system (19) converge to the origin rapidly in spite of the disturbance. Figure 3(b) shows the responses of the input signal, which demonstrates that the proposed control law is chattering free. The responses of the real value and its estimated value of disturbance are shown in Figure 4, and it is observed that FTDOB can estimate the disturbance quickly and efficiently.
The responses of the closed-loop systems (19) and (32). (a) The response curves of the states; (b) The response curve of the control signal.
The real value (, the solid line) and the estimated value (, the dotted line) of disturbance.
Conclusion
The ITSMC problem for a class of higher order nonlinear systems has been studied in this article. The main contribution of this article lies in the following aspects: (a) a novel FTC law with a simple structure has been proposed for a chain of integrators by using weighted homogeneity theory; (b) inspired by the proposed novel FTC law, a novel ITSMC law has been proposed for a class of higher order nonlinear systems; and (c) based on FTDOB technique and ITSMC approach, a chattering-free composite control law has been proposed for a class of higher order nonlinear systems in spite of parameter uncertainties and external disturbances.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work is supported by National Natural Science Foundation of China under Grant 61503122, the Foundation of Henan Education Committee under Grant 18A120008, and the Outstanding Youth Science Fund of Scientific and Technological Innovation from Pingdingshan under Grant 2017011(11.5).
ORCID iD
Qixun Lan
References
1.
UtkinVI.Sliding modes in control and optimization. Berlin; Heidelberg: Springer, 1992.
2.
GuldnerJUtkinVI.Sliding mode control for gradient tracking and robot navigation using artificial potential fields. IEEE Trans Robot Automat1995; 11(2): 247–254.
3.
ZhuZXiaYQFuMY.Adaptive sliding mode control for attitude stabilization with actuator saturation. IEEE Trans Ind Electr2011; 58(10): 4898–4907.
4.
YangJLiSHYuXH.Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans Ind Electr2013; 60(1): 160–169.
5.
DavilaJFridmanLLevantA.Second-order sliding-mode observer for mechanical systems. IEEE Trans Automat Control2005; 50(11): 1785–1789.
6.
XuQS.Digital integral terminal sliding mode predictive control of piezoelectric-driven motion system. IEEE Trans Ind Electr2016; 63(6): 3976–3984.
7.
XuQS.Piezoelectric positioning control with output-based discrete-time terminal sliding mode control. IET Control Theory Appl2017; 11(5): 694–702.
8.
FengYYuXHManZH.Non-singular terminal sliding mode control of rigid manipulators. Automatica2002; 38(12): 2159–2167.
9.
YuSHYuXHShirinzadehBet al. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica2005; 41: 1957–1964.
10.
BhatSPBernsteinDS.Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans Automat Control1998; 43(5): 678–682.
11.
BhatSPBernsteinDS.Geometric homogeneity with applications to finite-time stability. Mathemat Control Signals Syst2005; 17: 101–127.
12.
HongYG.Finite-time stabilization and stabilizability of a class of controllable systems. Syst Control Lett2002; 46(4): 231–236.
13.
HongYGJiangZP.Finite-time stabilization of nonlinear systems with parametric and dynamic uncertainties. IEEE Trans Automat Control2006; 51(2): 1950–1956.
14.
HuangXQLinWYangB.Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica2005; 41(5): 881–888.
15.
ShenYJXiaXH.Semi-global finite-time observers for nonlinear systems. Automatica2008; 44: 3152–3156.
16.
DingSHLiSH.Stabilization of the attitude of a rigid spacecraft with external disturbances using finite-time control technique. Aerospace Sci Technol2009; 13: 256–265.
LiSHDuHBLinXZ.Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics. Automatica2011; 47: 1706–1712.
19.
DuHBLiSH.Finite-time attitude stabilization for a spacecraft using homogeneous method. J Guid Control Dyn2012; 35(3): 740–748.
20.
LiJQianCJDingSH.Global finite-time stabilisation by output feedback for a class of uncertain nonlinear systems. Int J Control2010; 83(11): 2241–2252.
21.
QianCJLiJ.Global output feedback stabilization of upper-triangular nonlinear systems using a homogeneous domination approach. Int J Robust Nonlinear Control2006; 16(9): 441–463.
22.
HongYGHuangJXuYS.On an output feedback finite-time stabilization problem. IEEE Trans Automat Control2001; 46(2): 305–309.
23.
LiJQianCJ.Global finite-time stabilization by dynamic output feedback for a class of continuous nonlinear systems. IEEE Trans Automat Control2006; 51(5): 879–884.
24.
SunZYLiuZGZhangXH.New results on global stabilization for time-delay nonlinear systems with low-order and high-order growth conditions. Int J Robust Nonlinear Control2015; 25(6): 878–899.
25.
YinJLKhooSYManZHet al. Finite-time stability and instability of stochastic nonlinear systems. Automatica2011; 47: 2671–2677.
26.
SunZYXueLRZhangKM.A new approach to finite-time adaptive stabilization of high-order uncertain nonlinear system. Automatica2015; 58: 60–66.
27.
SunZYYunMMLiT.A new approach to fast global finite-time stabilization of high-order nonlinear system. Automatica2017; 81: 455–463.
28.
WangZLiSHYangJet al. Current sensorless finite-time control for buck converters with time-varying disturbances. Control Eng Pract2018; 77: 127–137.
29.
SunHBHouLLZongGDet al. Fixed-time attitude tracking control for spacecraft with input quantization. IEEE Trans Aerospace Electr Syst2018; 55: 124–134.
30.
SunHBHouLLZongGD.Continuous finite time control for static var compensator with mismatched disturbances. Nonlinear Dyn2016; 85(4): 2159–2169.
31.
YangJDingZTLiSHet al. Continuous finite-time output regulation of nonlinear systems with unmatched time-varying disturbances. IEEE Contr Syst Lett2018; 2(1): 97–102.
32.
ZhangCLYangJWenCY.Global stabilisation for a class of uncertain nonlinear systems: a novel non-recursive design framework. J Contr Decis2017; 4(2): 57–69.
33.
LanQXQianCJLiSH.Finite-time disturbance observer design and attitude tracking control of a rigid spacecraft. J Dyn Syst Measure Control2017; 139(6): 061010.
34.
LanQXNiuHWLiuYMet al. Global output-feedback finite-time stabilization for a class of stochastic nonlinear cascaded systems. Kybernetika2017; 53(5): 780–802.
35.
ZhaoDYLiSYGaoF.A new terminal sliding mode control for robotic manipulators. Int J Control2009; 82(10): 1804–1813.
36.
ChiuCS.Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems. Automatica2012; 48: 316–326.
37.
LuKFXiaYQ.Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica2013; 49(12): 3591–3599.
38.
FengYYuXHHanFL.On nonsingular terminal sliding-mode control of nonlinear systems. Automatica2013; 49: 1715–1722.
39.
ZongQZhaoZSZhangJ.Higher order sliding mode control with self-tuning law based on integral sliding mode. IET Contr Theory Appl2010; 4(7): 1282–1289.
40.
XuQS.Continuous integral terminal third-order sliding mode motion control for piezoelectric nanopositioning system. IEEE/ASME Trans Mechatron2017; 22(4): 1828–1838.
41.
DingSHMeiKQLiSH.A new second-order sliding mode and its application to nonlinear constrained systems. IEEE Trans Automat Control. Epub ahead of print August 2018. DOI: 10.1109/TAC.2018.2867163.
42.
HermesH.Homogeneous coordinates and continuous asymptotically stabilizing feedback controls. Different Equat Stabil Control1991; 109: 249–260.
43.
SunHBHouLLZongGDet al. Composite adaptive anti-disturbance control for MIMO nonlinearly parameterized systems with mismatched general periodic disturbances. Int J Comp Mathemat2017; 94(10): 2089–2105.
ManYCLiuYG.Global adaptive stabilisation for nonlinear systems with unknown control directions and input disturbance. Int J Control2016; 89(5): 1038–1046.
46.
SunZYLiTYangSH.A unified time-varying feedback approach and its applications in adaptive stabilization of high-order uncertain nonlinear systems. Automatica2016; 70: 249–257.
47.
ZhangJLiuYGMuXW.Further results on global adaptive stabilisation for a class of uncertain stochastic nonlinear systems. Int J Control2015; 88(3): 441–450.
48.
SunZYYangSHLiT.Global adaptive stabilization for high-order uncertain time-varying nonlinear systems with time-delays. Int J Robust Nonlinear Control2017; 27(13): 2198–2217.
49.
LiFZLiuYG.General stochastic convergence theorem and stochastic adaptive output-feedback controller. IEEE Trans Automat Control2017; 62(5): 2334–2349.
50.
SongZBSunZYYangSHet al. Global stabilization via nested saturation function for high-order feedforward nonlinear systems with unknown time-varying delays. Int J Robust Nonlinear Control2016; 26(15): 3363–3387.
51.
LiTSunZYYangSH.Output tracking control for generalized high-order nonlinear system with serious uncertainties. Int J Control2016; 90(2): 323–333.
52.
MoulayE.Stabilization via homogeneous feedback controls. Automatica2008; 44: 2981–2984.
53.
QianCJLinW.A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans Automat Control2001; 46(7): 1061–1079.
LevantA.Higher-order sliding modes, differentiation and output-feedback control. Int J Control2003; 76(9): 924–941.
58.
ShtesselYBShkolnikovIALevantA.Guidance and control of missile interceptor using second-order sliding modes. IEEE Trans Aerospace Electr Syst2009; 45(1): 110–123.
59.
LiSHTianYP.Finite-time stability of cascaded time-varying systems. Int J Control2007; 80(4): 646–657.
60.
KhooSYYinJLManZHet al. Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatica2013; 49: 1403–1410.