
Abstract
The Peltier is a refrigeration device and usually used in the form of single layer. Sometimes single-layer Peltier may not have sufficient refrigerating capacity with deeper application. To this end, a double-layer Peltier system is proposed in this article. With the increasing layers, the nonlinearity of the system is enhanced and the multiple variables are coupled, bringing about control difficulty. To solve these control problems and promote the disturbance rejection performance, a composite controller is presented, consisting of feedback regulation based on finite-time control and feed-forward compensation based on finite-time disturbance observer. Then, finite-time Lyapunov stability analysis is shown to prove that this control scheme can converge to the equilibrium point in finite time. Last but not least, simulation and experiment are conducted to verify that the proposed strategy has not only a rapid convergence performance but also a prominent disturbance rejection property.
Keywords
Introduction
Virtual reality technology is one of the most significant technologies in this new century. It is a comprehensive modern science and technology, combining multiple technologies such as computer science, artificial intelligence, bionics, and communication. 1 It is widely used in medical treatment, aerospace, game industry, cultural relics, historic sites, and so on. 2 Aiming to provide people with sense of reality and immersion, virtual reality technology needs to reproduce the five senses of human (sight, hearing, smell, taste, and touch) effectively. 3 Compared with the other four senses, it is harder for touch to be represented. Touch mainly includes force touch, texture touch, and thermal touch. Force touch and texture touch have got great development because of the convenience brought by pressure sensor and computer image processing technology. 4 In the field of thermal touch, the Peltier device is most commonly used.
Peltier device is a heat-absorbing device and its basic principle is thermoelectric effect, including Seebeck effect, Peltier effect, and Thomson effect. 5 Peltier device has many advantages. For example, it has a compact size and does not generate vibration noises or freon gas. 6 The most prominent advantage is its relatively fast response characteristics. Due to these factors, it is typically used in cryomite and other refrigeration equipment.
However, the nonlinear characteristics exist in the Peltier device. First is the heat flux in the form of current square, and second is the coupling of temperature and state.7–9 What is more, the uncertain disturbances affect the system. For example, the heat of the contacted object can flow into the thermal system. 9 Controlling the thermal system is anything but a facile matter.
Researchers have applied PID (proportional–integral–derivative) control, 10 internal model control, 11 sliding mode control, 12 and so on, to control the temperature of Peltier device. Janicki et al. 10 discussed the practical realization of controlling cooling conditions during the transient thermal measurements by PID algorithm. In the work by Jiang et al., 11 a Peltier device was applied to microfluidic platform to perform sensitive biochemical reactions for medical diagnostics. The authors employed internal model control to achieve the genetic amplification. Guiatni et al. 12 used linear and nonlinear recursive autoregressive moving-average (ARMA) equations and linear least square method (LSM) to identify the complicated heating models. They successfully constructed a more robust controller by sliding mode control algorithm so that it can be implemented on a haptic system for virtual reality and telepresence applications.
The above papers employed diverse methods to Peltier device in various areas successfully. However, they still have some room for improvement. On one hand, all the methods mentioned above belong to passive disturbance rejection control which utilizes tracking error to adjust the control quantity, and they can suppress disturbance to some extent, while they can not eliminate the effect on the system disturbances quickly and may sacrifice the nominal performance of the system. 13 To enhance the disturbance rejection performance, researchers have put forward active disturbance rejection control technique based on feed-forward disturbance compensation. 14 The so-called active disturbance rejection control is used as the control signal to compensate for real disturbance in the system. At first, the feed-forward element evaluates the value of the disturbance and then compensates the plant for the evaluated disturbance. Under the action of compensation, the system disturbance can be reduced or even eliminated.
On the other hand, with the improving application requirements, single-layer Peltier cannot meet the actual demands for the following reasons. Generally, the refrigeration temperature of single-layer Peltier cannot exceed no more than 70 K. 15 Besides, the refrigeration performance will deteriorate under a large temperature difference. Moreover, the application of single-layer Peltier is restricted in cryogenic areas. For the sake of improvement, we design a double-layer Peltier device combined by two single-layer Peltier devices. Double-layer Peltier can not only achieve a greater temperature difference in refrigeration but also perform well when the temperature difference between the Peltier device and the external environment increases. However, with the increasing layers, the nonlinearity of the system and the coupling variables will become more complex for the researchers to control.
As the controller designing, finite-time control has attracted the attention of more and more investigators in recent years. The major reason is that finite-time control is sensitive to the external disturbances and can reduce them quickly and effectively by means of tracking error in the feedback channel. Relative to other asymptotic convergence control system, finite-time control system has a faster convergence speed and a better robust performance. 16 What is more, disturbance observer-based control (DOBC) has triggered a boom in research because it can eliminate the nonzero disturbances, provided they can be estimated accurately.17–19 Finite-time observer can observe the value of the disturbances exactly and then the estimation value can be employed to compensate the disturbances from the feed-forward channel, neutralizing the effect of the disturbance and greatly improving the disturbance rejection property.20,21
One of our previous papers 8 researched on the asymptotic stability of the single-layer Peltier system based on generalized proportional integral observer (GPIO). For the proposed double-layer Peltier system in this article, we adopt an advanced control strategy consisting of finite-time feedback control and finite-time observer-based feed-forward control. By finite-time Lyapunov stability theory, we successfully prove that this control scheme is feasible and can stabilize the system in finite time. Besides, we disturb the system at a particular moment and verify that this double-layer Peltier system is a robust system with strong disturbance rejection property. What is more, through simulation and experiment compared with single-layer Peltier finite-time stable system and double-layer Peltier asymptotically stable system, the double-layer Peltier finite-time stable system exhibits an outstanding control performance in faster convergence speed and better disturbance rejection property.
This article is organized as follows. Section “Modeling of double-layer Peltier system” gives the model of the double-layer Peltier system and sets up the differential equations according to the equivalent circuit diagram. In section “Controller design,” we design a composite control algorithm based on disturbance feed-forward compensation and finite-time control. Then, the finite-time Lyapunov stability analysis is presented in this section. In section “Simulation and experiment,” the results of simulation and experiment verify the superiority of the proposed method. Finally, conclusions are drawn in section “Conclusion.”
Modeling of double-layer Peltier system
The schematic diagram of double-layer Peltier system is shown in Figure 1. It composes of two single-layer Peltier devices in parallel, two sensors (on the top of each layer), an object (e.g. a finger), and a heat sink, respectively.
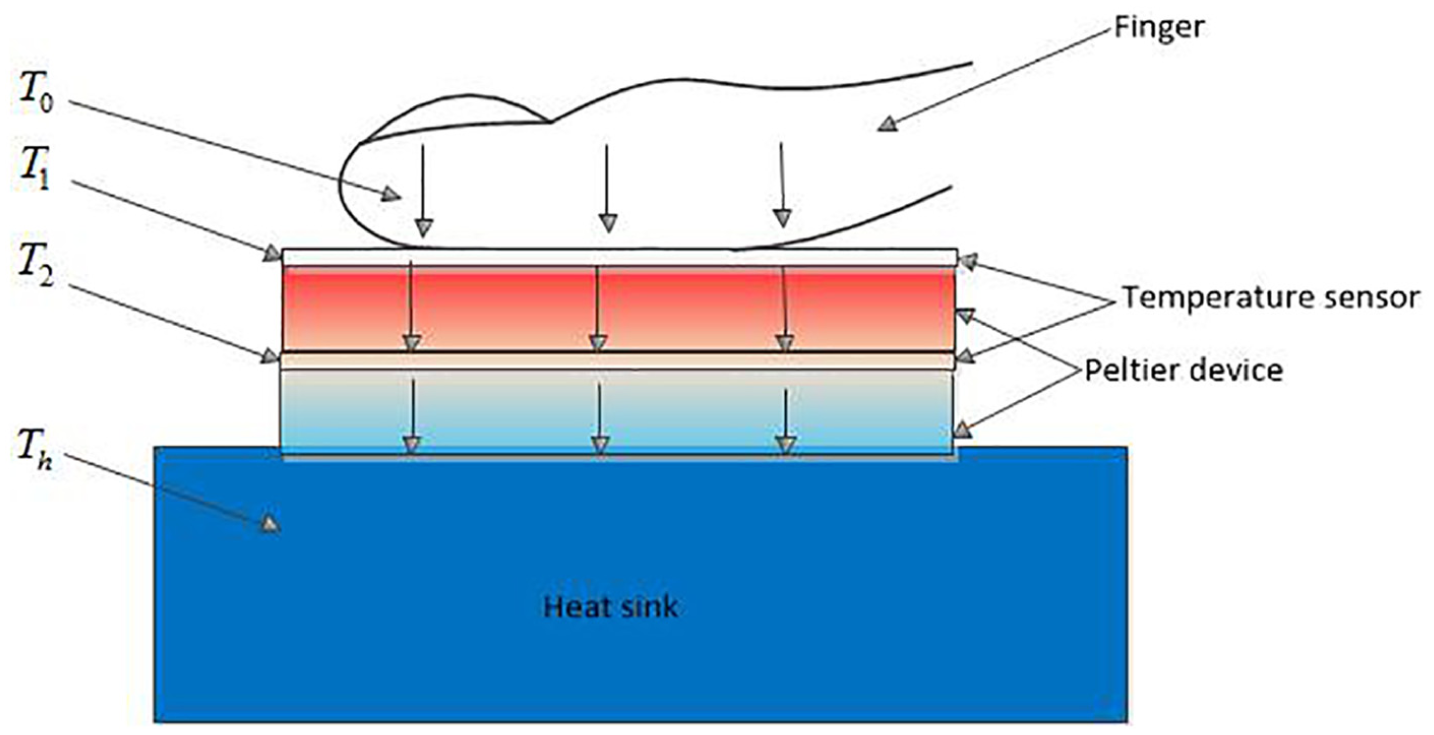
Schematic diagram of double-layer Peltier system.
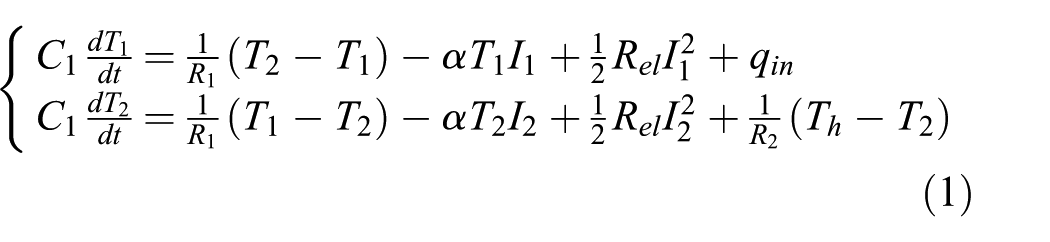
Thermal network model is a kind of effective method in modeling Peltier system. In the works by Morimitsu and Katsura 7 and Chen et al., 8 the single-layer Peltier thermal network model has been established. Here, we extend single-layer Peltier thermal network model to double-layer Peltier. Through the thermal network method, we can easily obtain the equivalent circuit diagram. The equivalent circuit diagram of double-layer Peltier is shown in Figure 2.

Equivalent circuit diagram of double-layer Peltier system (
From Figure 2, the temperature model can be written as follows
Denoting

where
Since the temperatures

Setting the reference temperatures of the upper and the lower layers as

Controller design
Disturbance rejection and rapid convergence performance are extremely critical criteria to evaluate the performance of a control system. 22 Of all the control algorithms, finite-time stable system has received widespread attention because of its strong robustness and disturbance rejection property compared with asymptotically stable system.23,24
In order to provide a superior stability and tracking performance, we adopt DOBC. 25 The core idea of DOBC is to detect the unknown disturbance and then dilute the influence of the disturbance by a feed-forward compensator. 26
In this article, at first, we design finite-time disturbance observers to estimate the value of the disturbances. Then, based on the disturbance feed-forward compensation and feedback control, a composite controller is developed, which stabilizes the disturbed system. Finally, finite-time Lyapunov stability theory is provided to prove the stability of the proposed method.
Design of the finite-time observer
In this section, we introduce two finite-time observers for each layer of the double-layer Peltier system.
Definition 1
Given two metric spaces

Any such
Assumption 1
In system (2), the disturbances
Considering the disturbances of system (4) satisfying Assumption 1, the finite-time observers for system (4) can be designed as follows
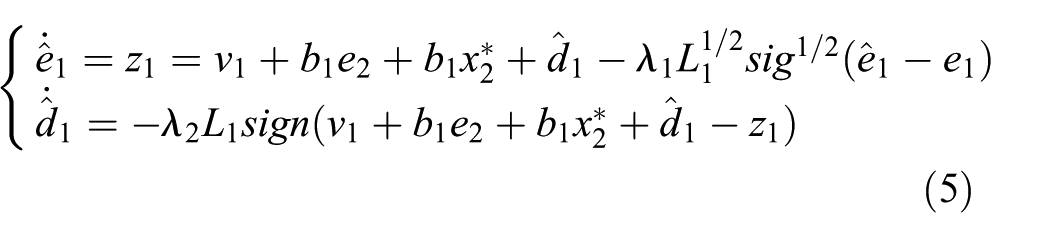

where
Design of the finite-time composite controller
With regard to double-layer Peltier system, there exists the coupling of states between the upper layer and the lower layer. The coupling will be more complex as the numbers of the layers increase.
In this double-layer system, taking into consideration that the states
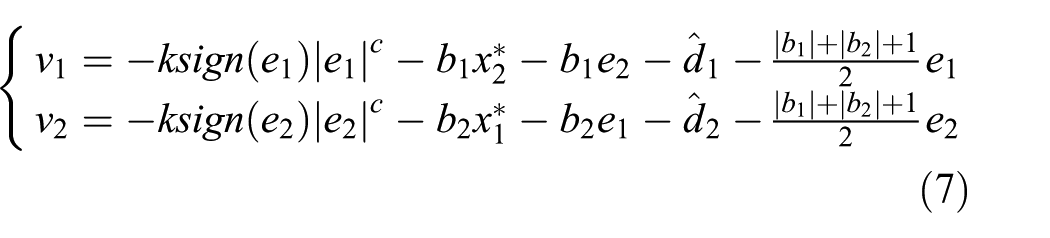
where

The other solution of the control equation (3) is far out of the system input range
Stability analysis
In order to prove the finite-time stability of system (2), we adopt the finite-time Lyapunov stability theory.
Lemma 1
Assume that continuously differentiable function
There exists

The system is stable in finite time. When
Lemma 2
If the disturbance satisfies n times differentiable and
where
Theorem 1
Considering that the disturbances acting on system (2) satisfy Assumption 1, when the control laws are designed as equation (8), the double-layer Peiter system (2) will be stable in finite time.
Proof
Under the action of the control laws (equation (8)), the closed-loop error system is obtained as follows

For system (4) and disturbance observers (equations (5) and (6)), define the observation error
The finite-time stability analysis of the closed-loop system (10) is divided into two parts. One is the boundedness of
On one hand, when

where
On the other hand, when

Selecting the same Lyapunov function as above, when

Hence, when

where
Remark 1
Here, we revert composite finite-time method to single layer. From our previous paper, 8 the temperature model of single-layer Peltier is shown as follows

where

where

where
The stability proof of the finite-time composite method for single-layer Peltier can refer to the preceding text, which is omitted here.
Remark 2
Also from the work by Chen, 8 we extend single-layer asymptotically stable method to double layer. The GPI observers for system (2) are given as follows


where

When the fractional power
Here, the stability proof of the asymptotic convergence system above is omitted as well.
Simulation and experiment
In this section, simulations and experiments are carried out to verify the superiority of the proposed method. At first, we apply the finite-time composite control (FTCC) to single-layer Peltier and double-layer Peltier, respectively, verifying that double-layer Peltier has better refrigeration property. Then, we adopt proportional–integral (PI) control and generalized proportional integral observer–based control (GPIOC) in contrast to the presented FTCC approach, showing that FTCC methods have not only rapider convergence performance but also better disturbance rejection performance. Besides, in order to make fair comparison, we adjust the parameters of each method to ensure that each method obtains the best performance relatively. What is more, control volume of each method is almost in the same amplitude.
Simulation
Disturbances are manifold in reality. Polynomial disturbance is fairly common; thus, when imitating the external disturbance, we select a kind of polynomial disturbance to act on the Peltier system. For the sake of comparison, the system must be stable when the disturbance occurs; we choose a relatively conservative time point
Taking practical use into consideration, the input has a saturation limit of
Control parameters of Peltier system.

FTCC: finite-time composite control; GPIOC: generalized proportional integral observer-based control; PI: proportional–integral.
Other parameters of the double-layer Peltier.

Temperature response curves between single-layer Peltier and double-layer Peltier are shown in Figure 3 and their performance indexes can be seen in Table 3. From Figure 3 and Table 3, under the action of the same FTCC method, the double-layer Peltier system reaches the equilibrium point at

Temperature response curves between single-layer Peltier and double-layer Peltier.
Comparison of single-layer and double-layer Peltier performance indexes.

OS: overshoot;
The control method of each system is finite-time composite control (FTCC).
Next, in order to testify that FTCC method has superior control performance, we compare it with the PI and GPIOC methods. For the double-layer Peltier system, the simulation results of three different methods are shown in Figures 4 and 5 and Table 4.
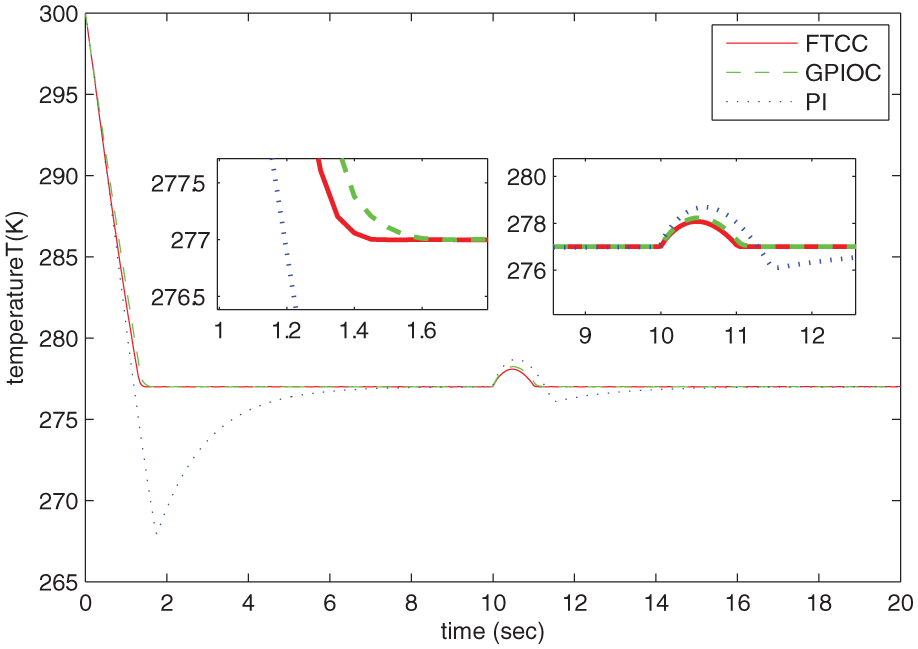
Temperature response curves between the three methods (simulation).
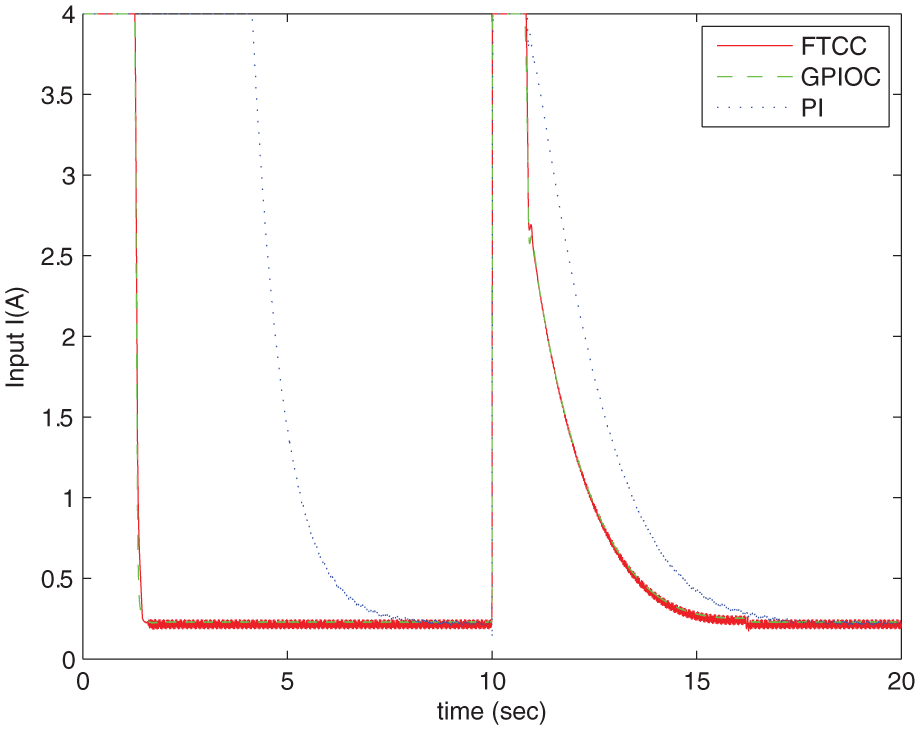
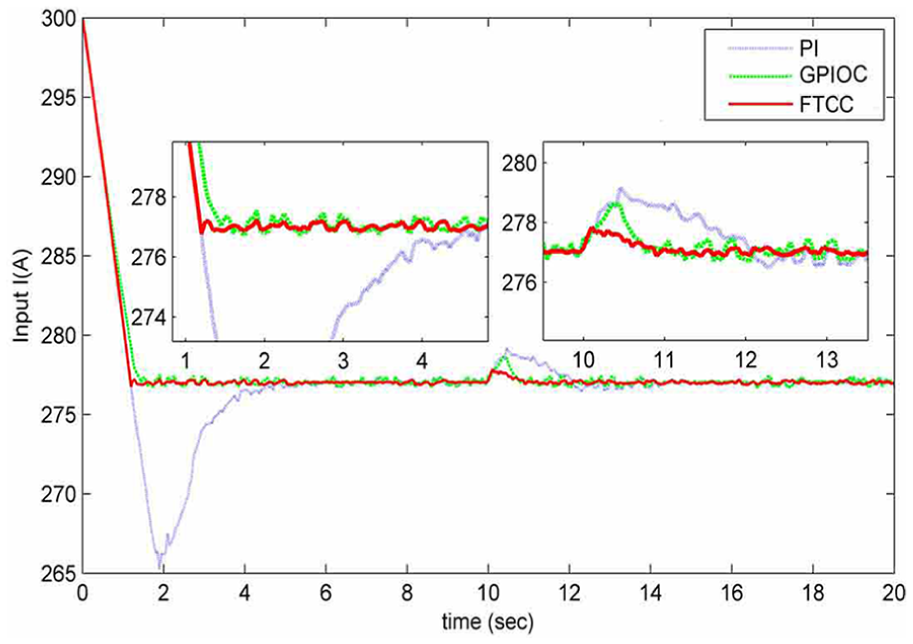
Control volume curves between the three methods (simulation).
Comparison of the simulation and experiment performance indexes.

OS: overshoot;
The tolerance band of overshoot is selected as
It can be seen from Figure 4 and Table 4 that FTCC and GPIOC methods have almost no overshoot, while PI method has a
Experiment
In this section, we verify the efficiency of FTCC by experiment. This device takes TI company’s dual-chip OMAP-L138 as the master controller composed of ARM9-AM1808 and DSP-C6748, of which the dominant frequency is 456 MHz. We run on the Linux operating system, completing non-real-time tasks on ARM. This system is responsible for man–computer interaction, reading data measured by the sensors, sending data to DSP, and so on. In DSP, we operate the SYS/BIOS system, making calculation of high-strength real-time data. This system receives data from the ARM circularly for computing dual core communication with each other through the DSPLINK (Figures 6 and 7).
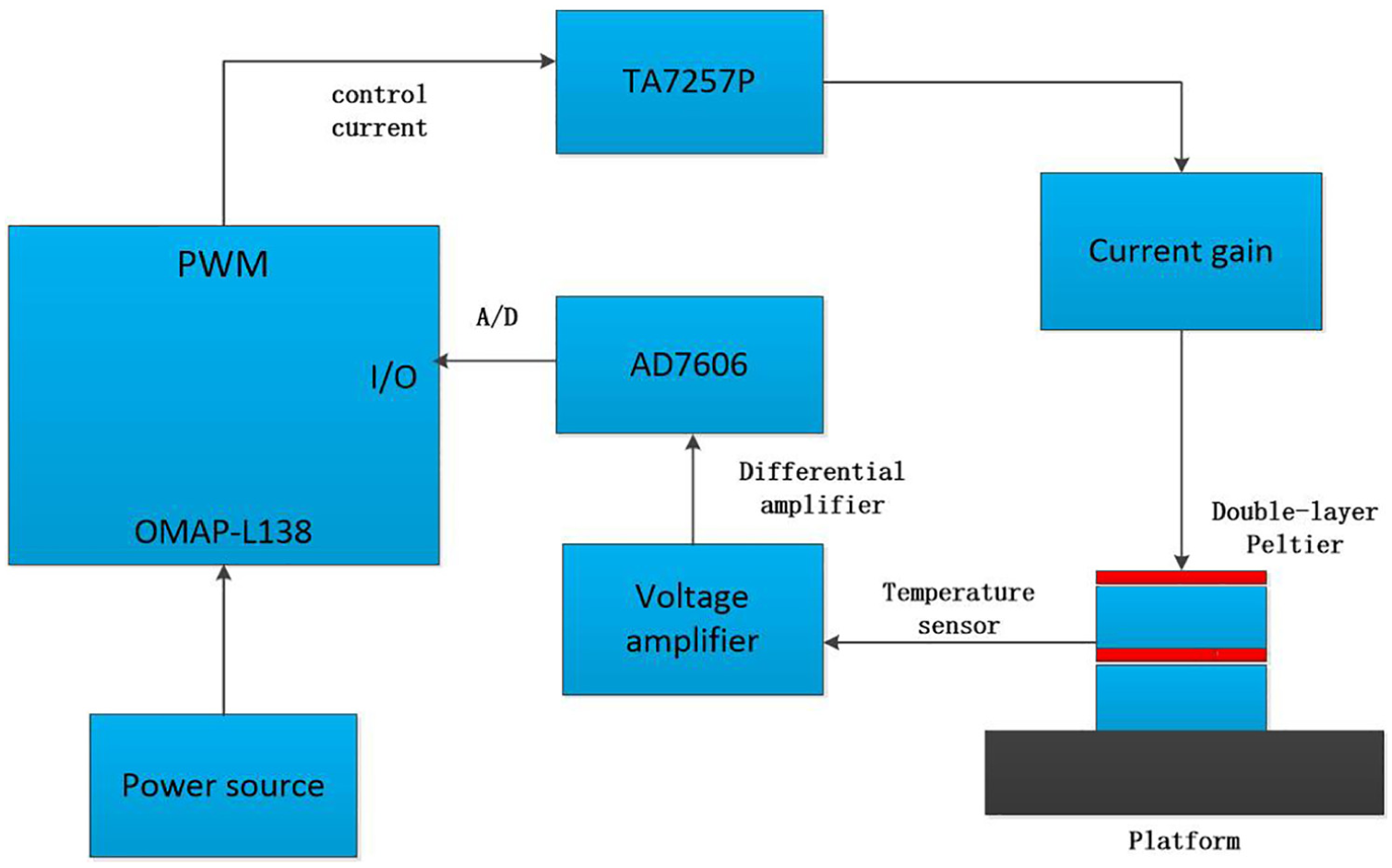
Configuration of experimental test setup.
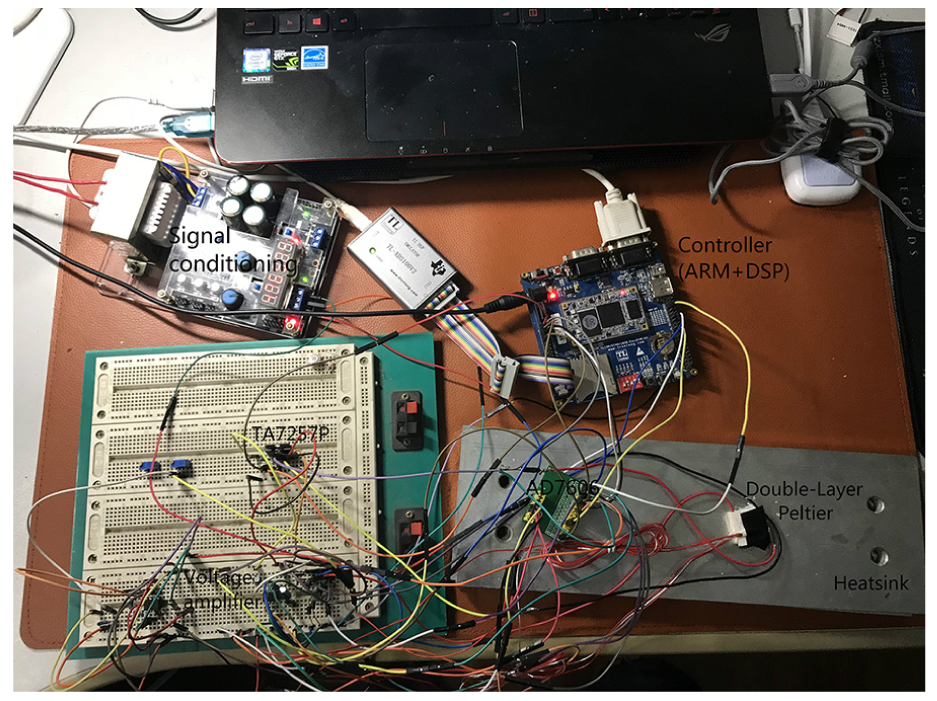
Experimental test setup.
The experimental setup has a saturation limit and thus the current range is set to
Figures 8 and 9 show the temperature response curve and the controlled quantity curve, respectively. It can be observed from Figure 8 and Table 4 that the FTCC method has the smallest overshoot, the shortest settling time, and the lowest temperature increase. As shown in Figure 9, the values of the three control methods are almost the same, which can ensure a fair comparison. All the experiment figures and indexes exhibit that FTCC method has the optimum control performance in rapid convergence and quick elimination of disturbance.
Temperature response curves between the three methods (experiment).

Control volume curves between the three methods (experiment).
Despite the fact that simulation and experiment have slight difference because of the experimental environment effect, the difference in external disturbance, and the thermal resistance variation, both of them exhibit that FTCC method has the optimum control performance in rapid convergence and quick elimination of disturbance.
Conclusion
In this article, we have proposed the concept of double-layer Peltier system and solved the control problem of Peltier system in cryogenic refrigeration field. Through thermal model, we have, respectively, designed the finite-time observer to estimate the disturbance of each layer. Based on the feed-forward compensation and output feedback, we have designed a composite finite-time controller, resolved the issue of finite-time stabilization, and certified the stability of the composite finite-time control. Through simulation and experiment, we have testified that the double-layer Peltier has a more robust performance than single-layer Peltier. In addition, we have certified that the FTCC method has better convergence performance and disturbance rejection property in contrast to the PI and GPIOC methods.
Footnotes
Handling Editor: Muhammad Akhtar
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was funded by the National Natural Science Foundation of China (NSFC) (grant numbers U1531104, U1731120, and 61473080) and the Special Fund of Jiangsu Province for Transformation of Scientific and Technological Achievements (grant number BA2017043).