
Abstract
Arm mounted unmanned aerial vehicles provide more feasible and attractive solution to manipulate objects in remote areas where access to arm mounted ground vehicles is not possible. In this research, an under-actuated quadrotor unmanned aerial vehicle model equipped with gripper is utilized to grab objects from inaccessible locations. A dual control structure is proposed for controlling and stabilization of the moving unmanned aerial vehicle along with the motions of the gripper. The control structure consists of model reference adaptive control augmented with an optimal baseline controller. Although model reference adaptive control deals with the uncertainties as well as attitude controlling of unmanned aerial vehicle, baseline controller is utilized to control the gripper, remove unwanted constant errors and disturbances during arm movement. The proposed control structure is applied in 6-degree-of-freedom nonlinear model of a quadrotor unmanned aerial vehicle equipped with gripper having (2 degrees of freedom) robotic limb; it is applicable for the simulations to desired path of unmanned aerial vehicle and to grasp object. Moreover, the efficiency of the presented control structure is compared with optimal baseline controller. It is observed that the proposed control algorithm has good transient behavior, better robustness in the presence of continuous uncertainties and gripper movement involved in the model of unmanned aerial vehicle.
Keywords
Introduction
In modern era, unmanned aerial vehicles (UAVs) are hired in a wide range of military and civilian applications. It includes long duration of aerographic sampling, localization, detection of pollution, landscape, path-planning and finding objects in remote areas. Modern UAVs require more precise and accurate tracking control to perform the desired task.1–3
To reduce its cost, weight factor, energy conservation and improved system performance, it is commonly designed to be an under-actuated UAV, such that it can achieve the same control properties as a fully actuated UAV with less input control laws by Madani et al. (2006). 4 In addition, a fully actuated UAV along with failed actuators is considered as under-actuated system, which is controlled by an under-actuated control algorithm.
Aerospace robots are concerned; there are two wide categories that robots fall in it, one is remotely operated UAV and other is autonomous operated UAV. Remotely operated vehicles are very common in the aerospace domain. The underwater robots that are able to swim in water are also very common for naval and underwater photography application, which is explained by Nicholson and Healey 5 and Wynn et al. 6 An emerging area of research is to apply robotics in the aerographic domain as well. Aerospace robotics has become very popular for many reasons, one among these is to access remote locations and grab objects.
This research proposes a model, controlling of rotorcraft, which is equipped with a gripper and we commonly called it as gripper. The main purpose of the attachment of gripper is that the aerospace robot should be able to grasp and carry payload from remote locations to desired destination. 7 UAVs equipped with a gripper is very common nowadays, and they have high degree of freedom (DOF) more than six that could prompt to transmuting applications, like fire frightening, infrastructure development and carry payload. We require a perfect precise, accurate controller for continuously moving UAV along with moving gripper end effector with respect to a protest of intrigue definitely enough for handling payload. The movement of the gripper affects the dynamic stability of UAV, additionally muddling the locations from previous works.8–11
Previously, many researchers have worked on UAV equipped with gripper through 1-DOF to 9-DOF. 12 The host UAV is responsible to offer the extension for the manipulation of DOF. And their results are valuable; some of them use simple grasping instead of ambidextrous handling. 13
The research work presents an innovative gripper-based UAV model which is controlled by using adaptive hybrid control structure, and its stability is also investigated. Our proposed UAV contains 8 DOF along with three manipulators: 6-DOF for UAV and 2-DOF for the gripper. Previously, an adaptive sliding mode controller (ASMC) was designed for the quad rotor aerial manipulation with 2-DOF gripper by Kim et al. 14 A two-layer-based novel controller was proposed for controlling the inverse kinematic of quadrotor UAV equipped with a manipulator, which is designed by Arleo et al. 15 The design and control of a hyper-redundant manipulator of UAV have 6 DOF, in which 6 DOF is for UAV system and 3 DOF is for the gripper, which was proposed by Danko and Oh. 16
If there are accumulation uncertainties in the dynamics of system, it will deteriorate the preferred close-loop performance of the system and then recovers the preferred performance by expanding the optimal baseline controller with model reference adaptive control (MRAC).
The main innovations of this research are as follows: (1) a dual control structure MRAC augmented with an optimal baseline controller which consists of adaptive control and linear quadratic regulator (LQR) with proportional integral (PI) feedback connection; (2) the baseline controller is able to control under minimal conditions—it means that it does not able to operate under uncertainties in the system. But it would be able to handle the constant disturbances in the system and perform the desired task; (3) the fine tuning of the system is done by using adaptive control laws and its stability is dealt by Lyapunov equation; (4) to minimize the Riccati equation for the calculation of state feedback gain by using optimal matrices is a major design issue in optimal baseline controller.
The content of this manuscript is structured as follows. Section “System model” discusses the complete model of quadrotor UAV equipped with gripper, which is followed by section “Designing of control architecture” in which designing of control architecture is presented, and the “Dual control approach” and dynamic effects of gripper are also discussed in this section. In section “Simulation results and discussions,” the validity of control structure simulations and experiments are defined. Finally, section “Conclusion” concludes the whole manuscript.
System model
The movements of quadrotor UAV along with 6 DOF are defined as in Figure 1.
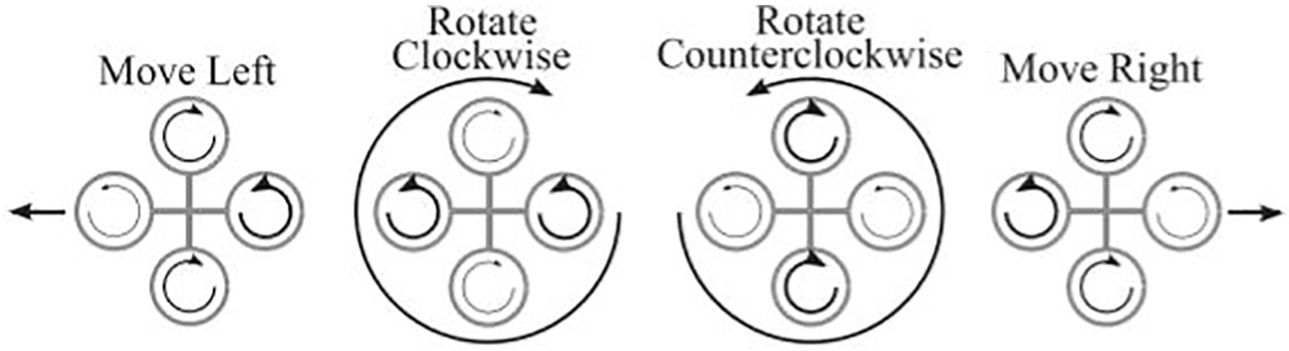
Movements of quadrotor aerial vehicle. 16
Assumption 1
The free body diagram and movements of aerial vehicle along
Supposition of rotor movements.
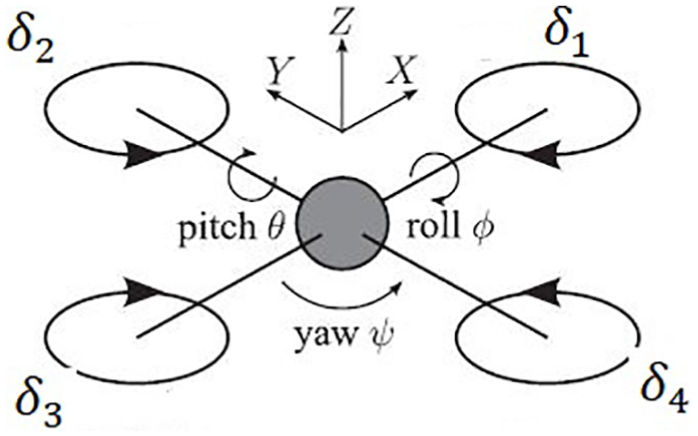
The fixed body Earth frame, roll, pitch, yaw and rotor movements are defined in Figure 2.
Remark 1
The drag and thrust coefficients must be taken as constant, as well as drag and rolling moments are neglected

where d is the drag factor and b is the thrust factor.
Assumption 2
If the propeller (rotors) velocities are varying slowly, its acceleration is insignificant for the dynamics of the system.
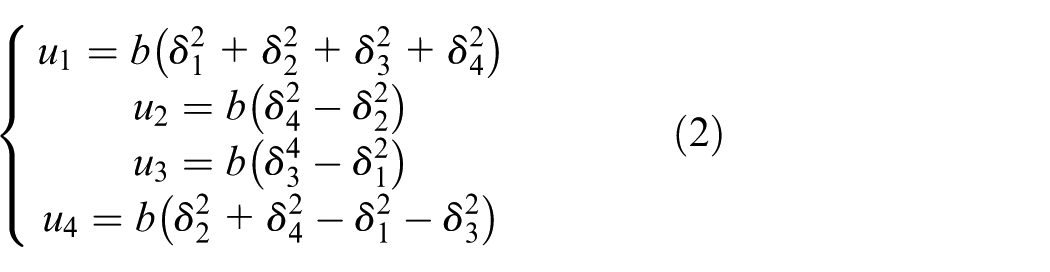
Following are the control terminologies of the UAV in which “
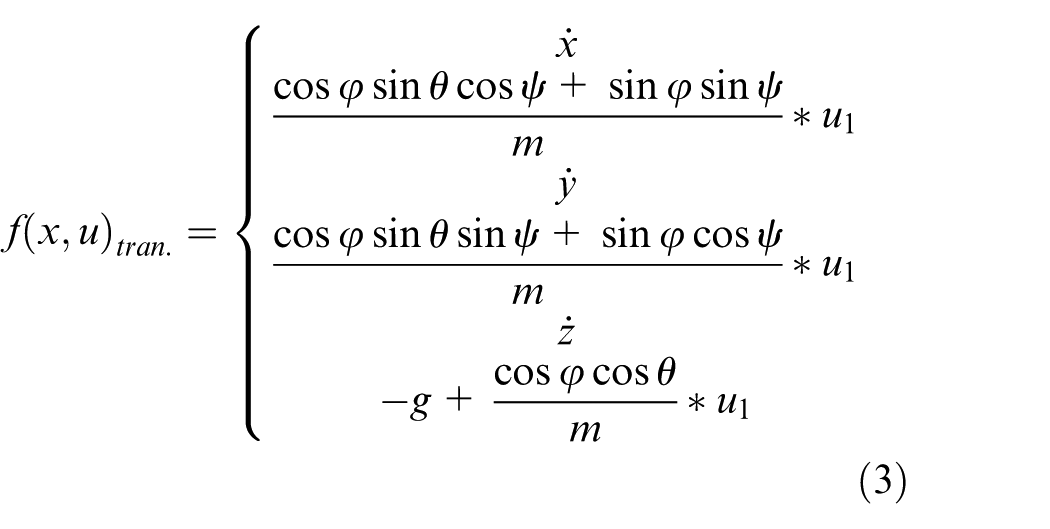
The translational movements are defined in Equation (3), which is used to control the translational velocities of quadrotor aerial robot. 19 The real-time constraints of embedded control loop are as follows
Rotational movements are defined in Equation (4) for the controlling of rotational velocities of quadrotor and can be obtained as follows
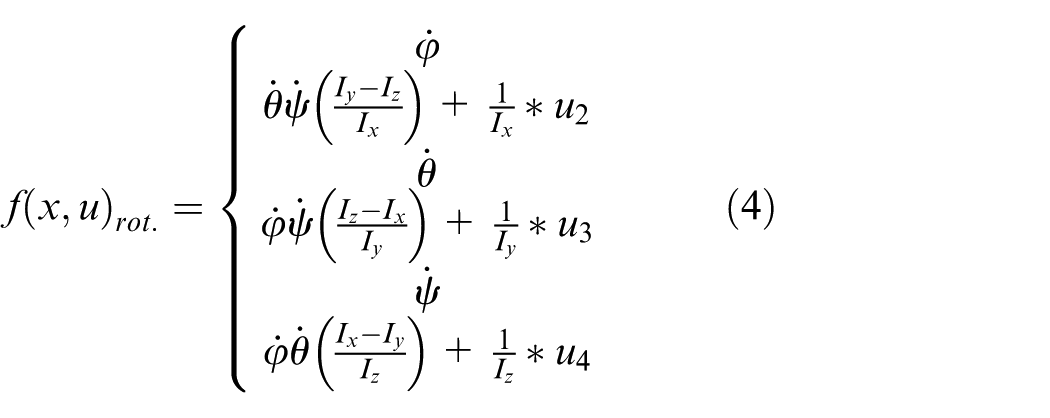
Newton’s equation of motion states that the rotational dynamics of any rigid body can be obtained as,

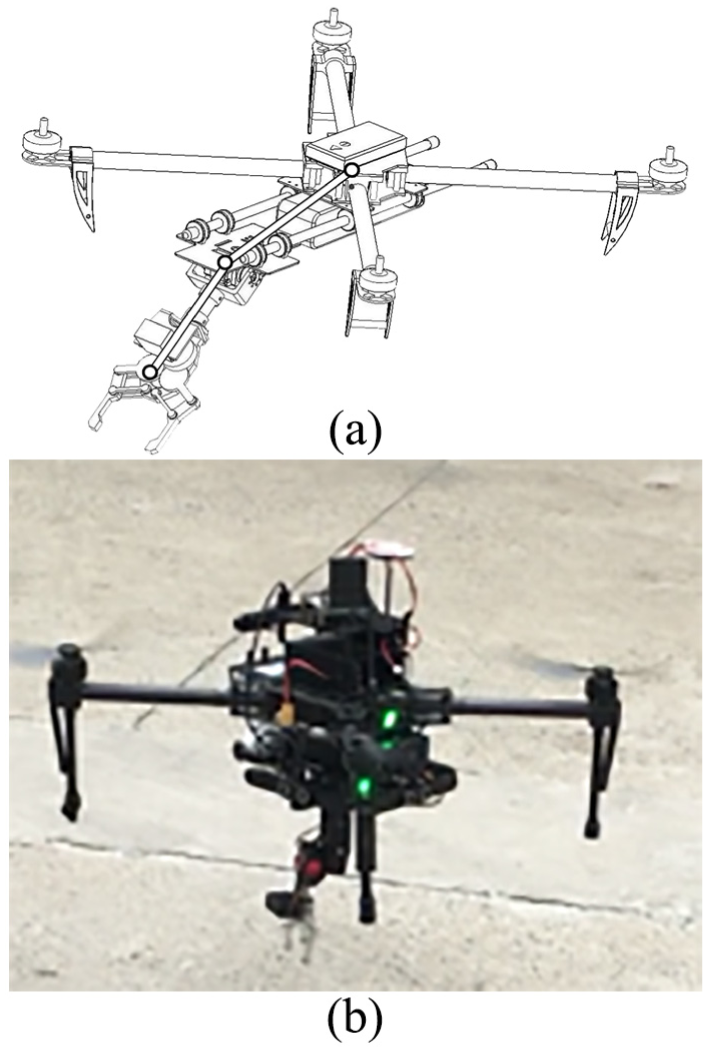
(a) Free body diagram of quadrotor aerial vehicle equipped with gripper 24 and (b) actual UAV model.
Transformation matrix between the angular velocities
Assumption 3
Simulated results show that the supposition

Rotation rates including motors input are used to define linearization of physical model of UAV. In the initial stage, steady-state solution must be taken in order to linearize the nonlinear behavior of the system by converging it to zero. In the simplest way, the UAV must linearize to the possible equilibrium points which is as follows

Remark 2
The trim point conditions are suitable to linearize the system. However, the operating points of the UAV is are by the input torque on the rotors
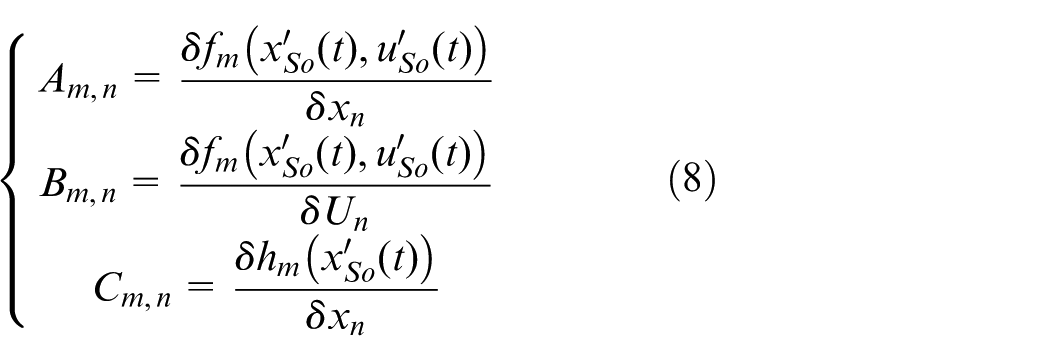
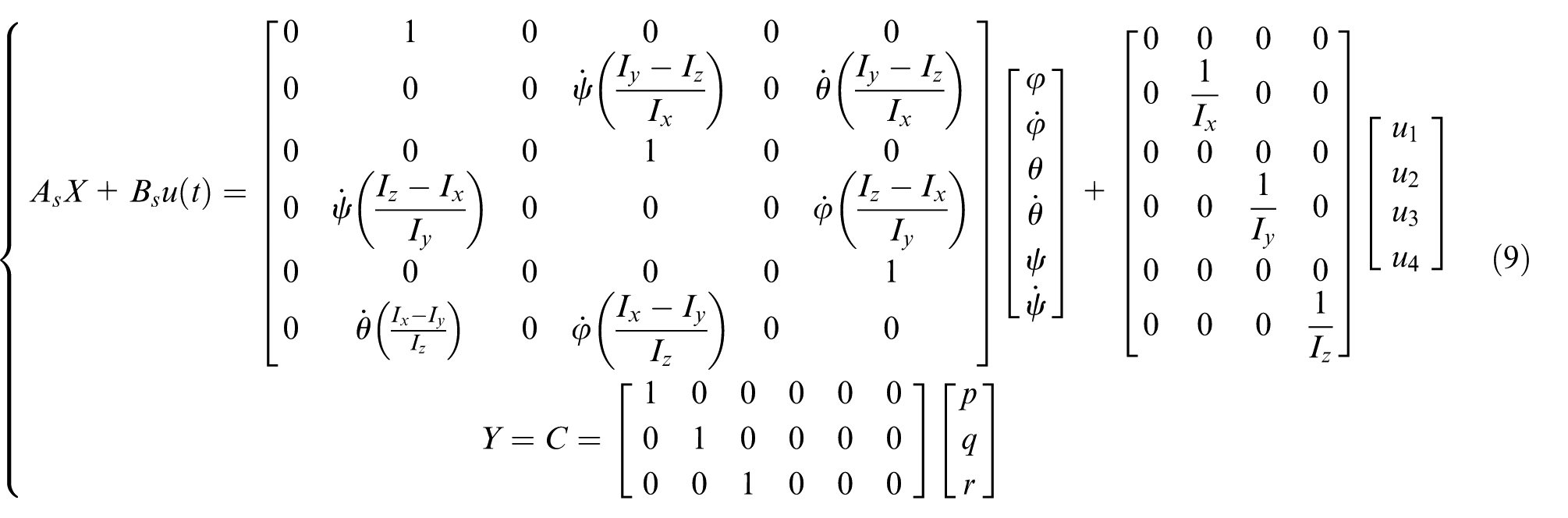
Nonlinear equations of the system are linearized by using Equation (8). The outcome of the final state-space model is eliminated due to non-controllable input or output. State-space model is structurally minimized by the elimination of non-minimal state dynamics, left with the rotational subsystem
Remark 3
The direct transition matrix D converges to zero due to no direct coupling and output of the system. The output matrix C consists of the measurement of three variables. The introduction of the UAV is edified by utilizing Euler angles that are used to variate the altitude and attitude rotating at global axis. 25
Designing of control architecture
The designing of the dual controller approach is to fulfill the desired manipulation job precisely and accurately, by designing the controller which must be able to satisfy some requirements: first, to handle external disturbances and give better robustness, because at the time of flying, the gripper can suddenly carry payload or no payload and it will deteriorate the stability of UAV. Hereafter, controller must be robust to control these sudden effects in the system. Furthermore, another main feature to design the controller is adaptability. If uncertainties lie in the system, it will destroy the desired performance as well as the stability of the system. At the time of gripping or discharging, the desired object can modify the physical quantities of the link of gripper.26,27 Then, adaptability with respect to these effects is essential to fulfill the desired task successfully. Figure 4 shows the block diagram of adaptive-based dual controller approach. 28
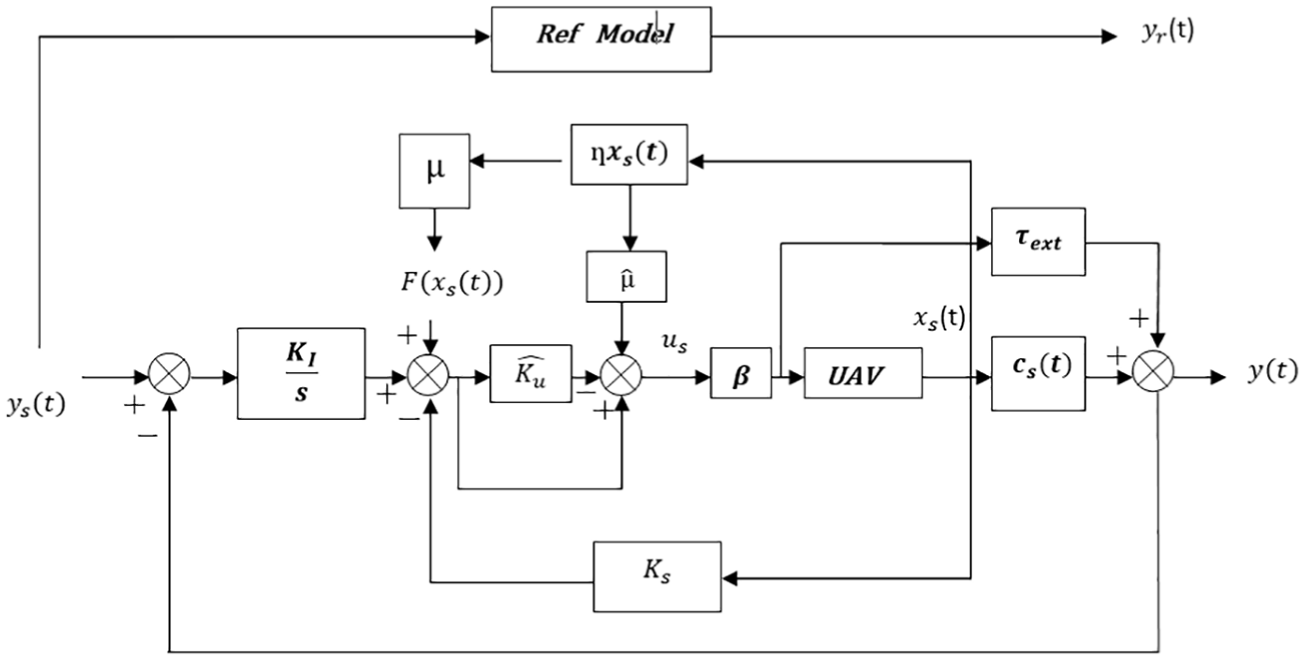
Block diagram of model-based adaptive hybrid controller.
Dual controller approach
Mostly, autonomous systems include autonomous underwater vehicles (AUVs) and UAVs are dealt by the MRAC. The dual controller which is based on adaptive controller is augmented with linear PI feedback controller. 28 The augmented architecture opposes adaptive stems from the fact that it is most realistic applications, a system that already has a model-based controller, which is designed to contain proportional as well as feedback integral connection. Such proposed model-based controller has been able to operate under no uncertainty conditions. It will be able to reject the unknown disturbances and would be able to track the desired or referred trajectory with minimum errors. By adding the uncertainty constant in the system, it will interrupt the desired performance of the system. The desired performance of the system is recovered by augmenting the model controller with an adaptive-based dual controller approach. 29
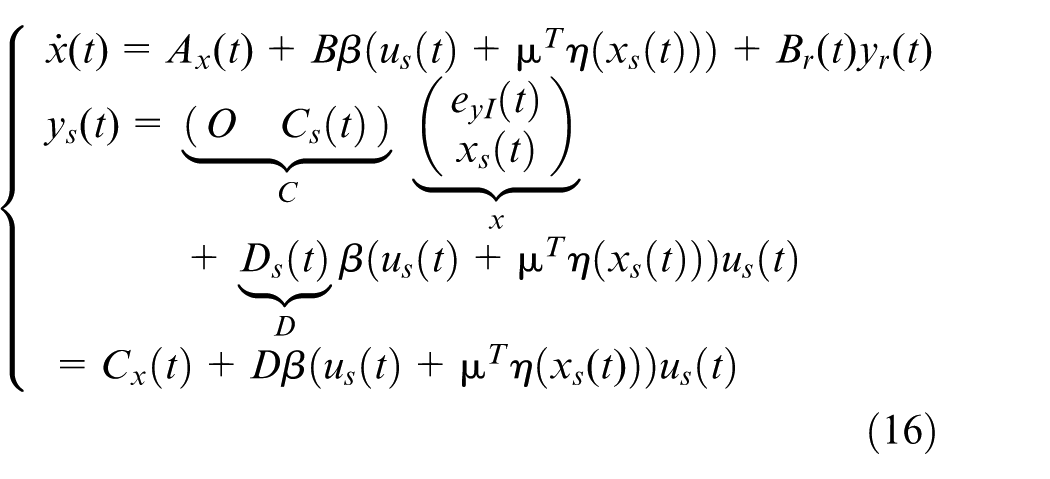
With respect to the nonlinear Multiple-Input-Multiple-Output (MIMO) system model of the UAV along with gripper, the system dynamics are already linearized. The uncertainties in the system dynamics which satisfy the matching conditions and the system dynamics are as follows

where xs (t) is the time-dependent state variable of UAV; ys (t) is the time-dependent output of UAV; As, Bs, Cs are matrices of UAV; us(t) is the time-dependent controller input; β is the uncertainity constant;

The

The tracking error related to the output of the system is given by

Now, the integral can be obtained as follows

Open loop dynamics of UAV are as follows
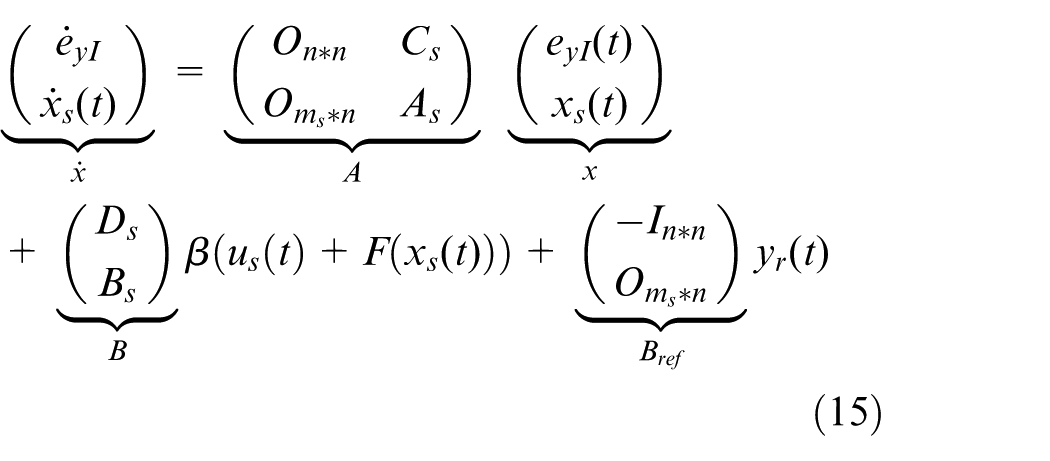
It is equivalent to, from Equation (17), the measured output in Equation (12)
The linear baseline open-loop dynamics of UAV is obtained as follows

Now, stabilization of the optimal controller is calculated

where

The linear quadratic cost index is designed to control the input “

where
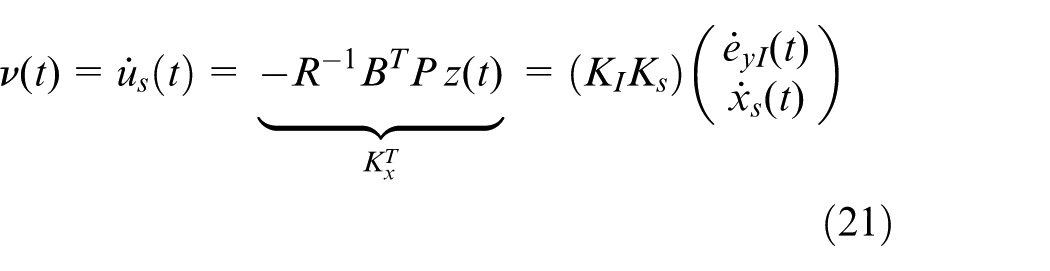
From Equation (21), the Riccati-based equation is obtained as follows

By integrating Equation (21), the baseline LQR-PI controller is obtained as follows

The optimal gain matrix is obtained as follows

The resulting model-based reference dynamics of system become

where

where

which is equivalent to
The regressor vector is as follows

The extended matrix for ideal parameters is obtained as follows

The adaptive component is utilized under uncertainties in the condition

where

Theorem
The uncertainty in the dynamics of our proposed system in Equation (10) is considered, operating under the nominal conditions of adaptive controller in Equation (32) and the updated adaptive law in Equation (42). Now, the reference model of system (25) is assumed and conditions are matched by using Equation (26), which could be driven by the unbounded external disturbance of the gripper. Riccati-based equation is used to define the positive definite symmetric matrix of all the gestures of that gripper, which is bounded with respect to time. The algebraic solution of Lyapunov-based positive definite symmetric matrix is provided in Equation (38).
The state tracking error is as follows

The tracking error dynamics is calculated as follows

By considering the unbounded quadratic Lyapunov function, we obtain

The algebraic form of Lyapunov equation is as follows

Time differentiating V is written as follows

Proof
We have proven that for any bounded command
By applying vector trace identity, we obtain

It yields
The updated adaptive law is as follows

Then

By using error dynamics of Equation (36), we obtain
The adaptive laws (42) is written as follows

Now the adaptive laws (42) becomes

The complete form of model-based adaptive hybrid controller is written as follows

which is also equivalent to
When movements of gripper adaptation is incorporated, such that the effects of gripper is measured as an external torque, rotational control law becomes

Dynamic effects of gripper: The attached gripper contains two joint links. The sum of external turning effect which is caused by the limb can be described by the total torque produced by individual arm effect

where
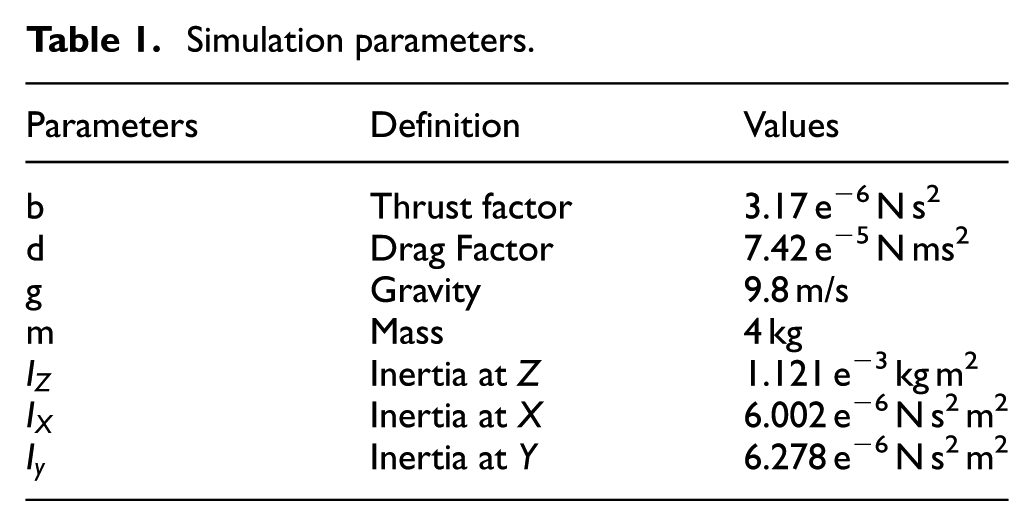
Simulation parameters.
Simulation results and discussion
The proposed model of quadrotor aerial vehicle equipped with gripper and the proposed control algorithm are presented in this section. To validate the robustness and feasibility of the designed controller in this research, we simulated the model of an under-actuated quad rotor UAV, in two scenarios one is to carrying payload and other is without carrying payload. To evaluate the effectiveness of the designed controller, the dynamic simulations of the proposed UAV model along with gripper are performed in MATLAB 2015/Simulink. The simulation results are shown in Figures 5–13.
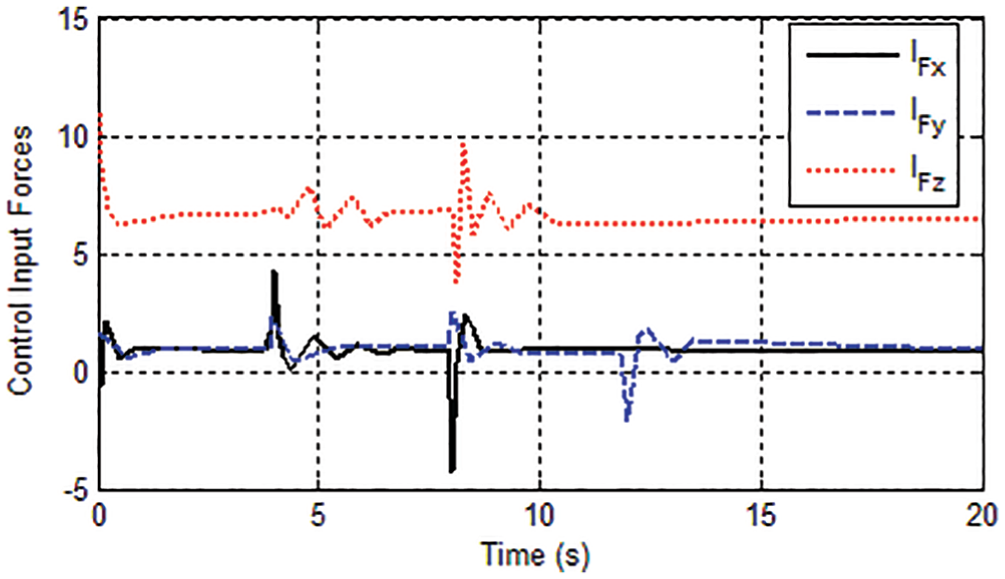
Control input forces of UAV.
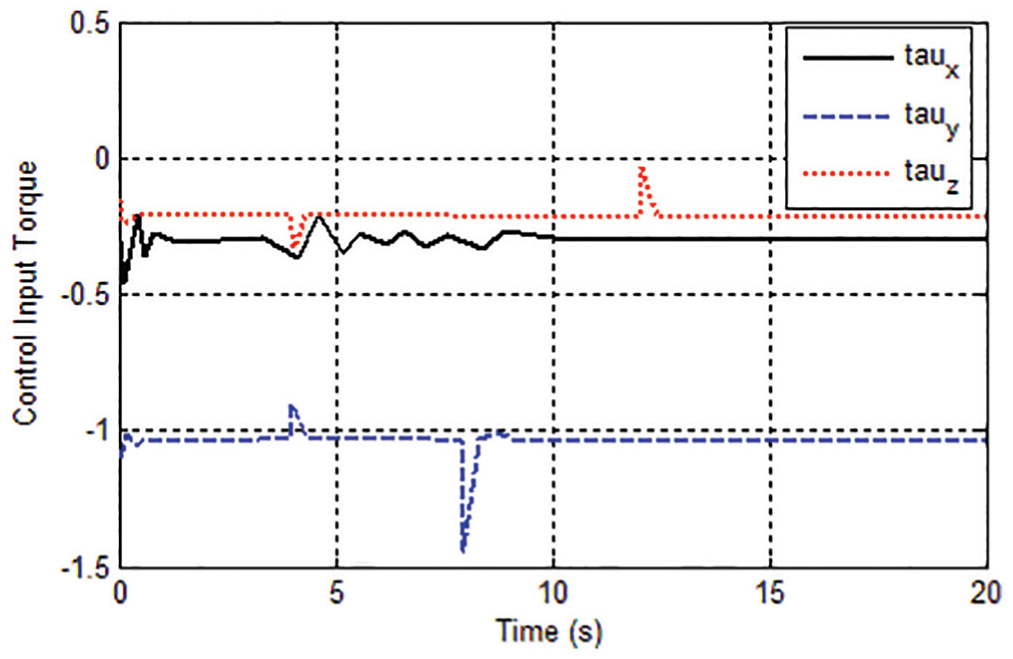
Control input torques of UAV.
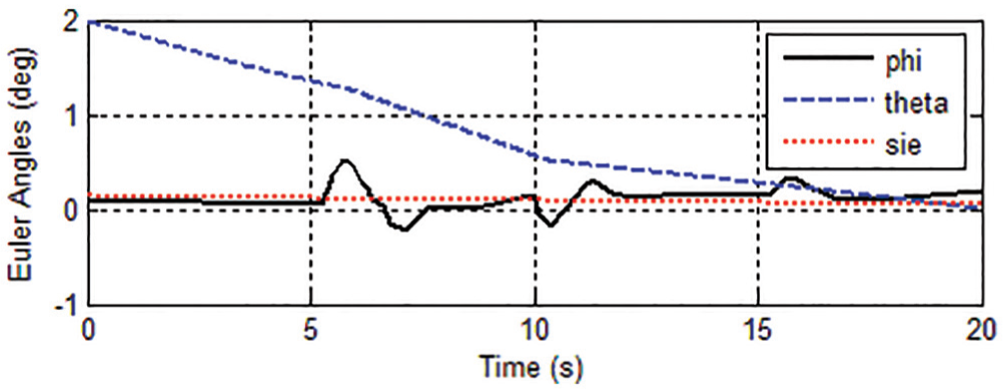
Euler angles without payload.
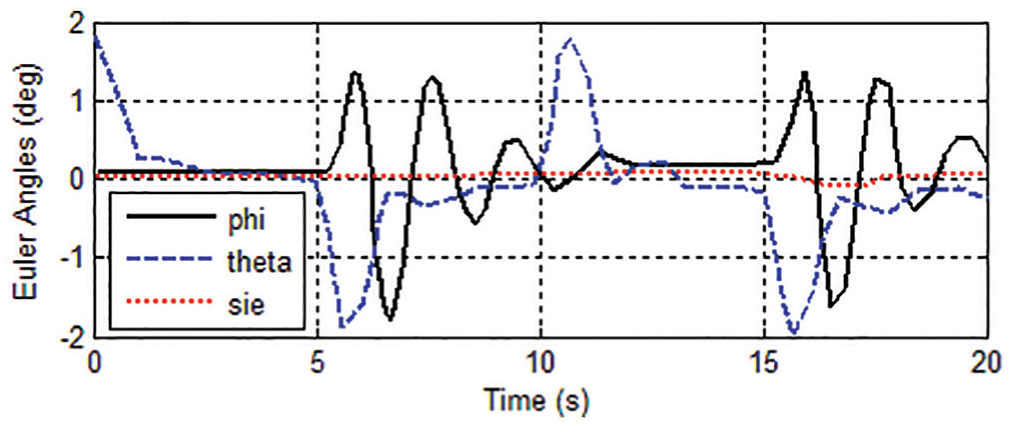
Euler angles with payload.
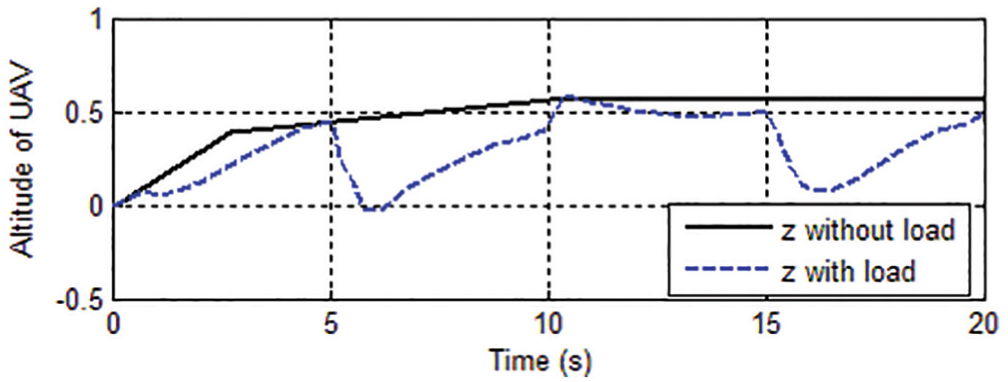
Altitude of UAV with and without payload.
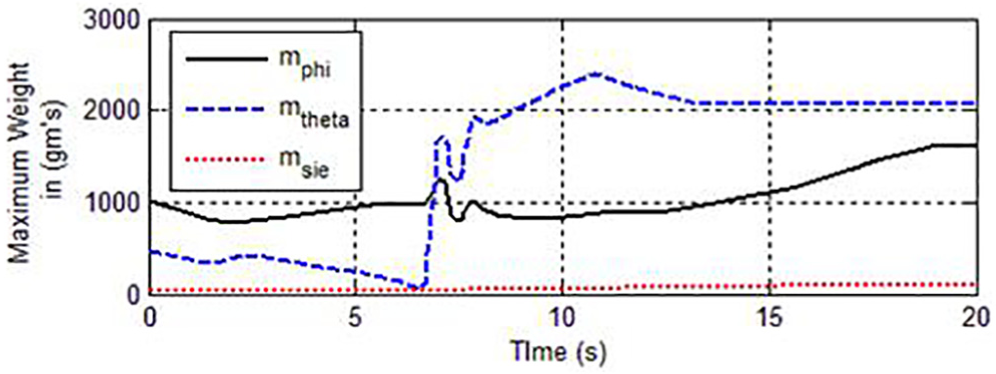
Payload effects due to the mass.
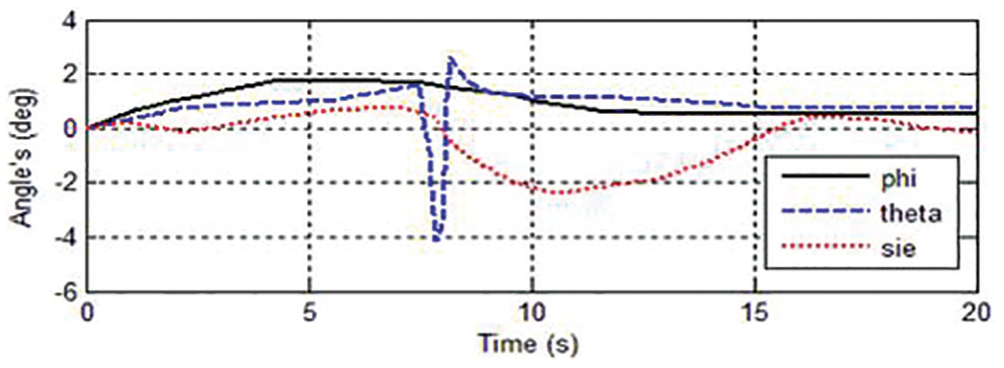
Payload effects on Euler angle.
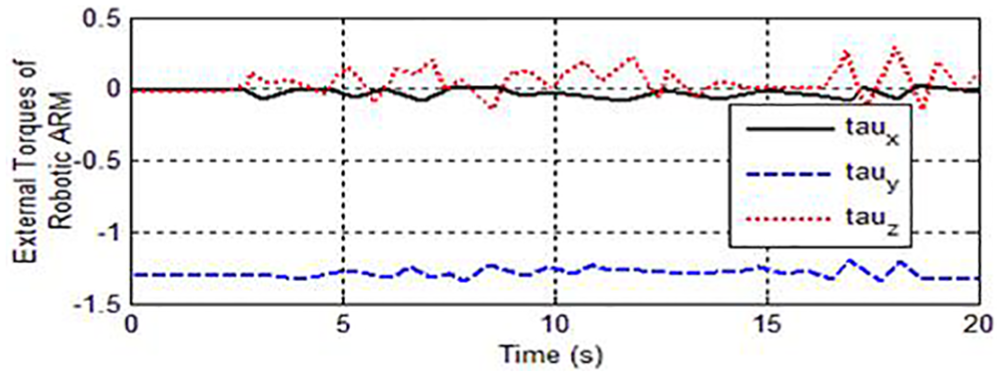
External torque effects of robotic arm without payload.
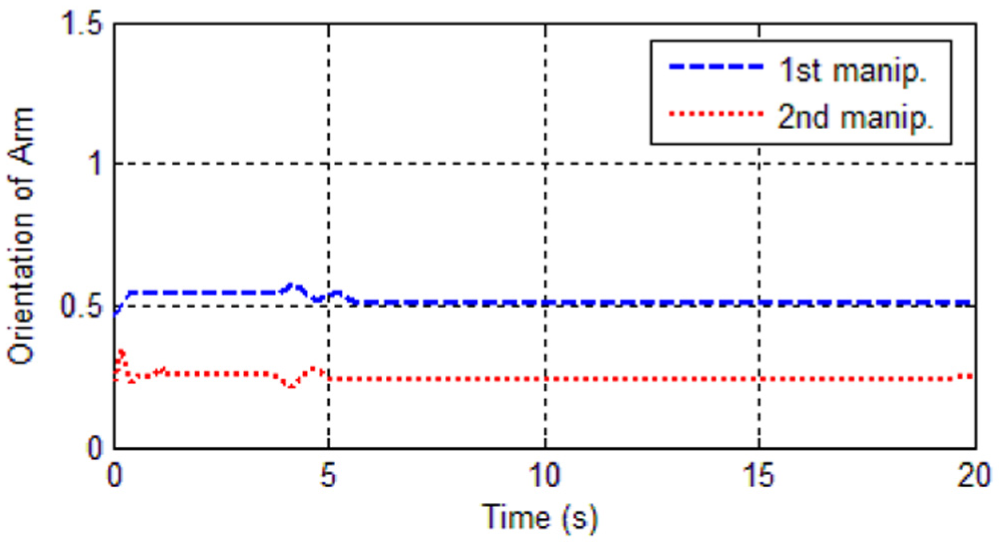
Orientation of arm without payload.
Figure 5 shows the inertial control input forces of UAV along
In Figure 9, the altitude response of the system is shown where altitude without load shows flat response while with payload, uneven variations can be seen at different time slots. Figure 10 shows the payload effects on Euler angles, in which it is mentioned that the maximum capacity to carry the payload is about 2000 g. In Figure 11, it is notified in the graph that pitch swims 4° around 8 s spot. However, when controlling the pitch “θ,” the coupled dynamics also produce effects on roll
The external torque effects lie along
Conclusion
This research presented an aerial manipulator combining a quadrotor and a 2-DOF gripper. To achieve the grabbing successful, the dynamic model of the combined system is analyzed and model-based adaptive optimal-based line controller was designed. Moreover, an adaptive law was proposed to accommodate the non-holonomic quadrotor and its velocities to support the three joints of the manipulator and rotorcraft. The proposed control algorithm is verified with and without including manipulation (payload) scenario simulation. When variation occurs in the input or external disturbance appears during flight operation due to the movement of gripper, the designed dual controller shows rapid rate of convergence and better robustness over others; therefore, the desired task of UAV is achieved with less margin of errors. The designed controller can be applied for the stabilization of the dynamics of UAV when carrying a payload. Furthermore, the simulated results show that the aerial gripper is a prominent solution for different scenarios of remote locations such as manipulation, inspection and transportation.
Future work
In this research, a 2-DOF gripper was used to grab the objects by using three manipulators, and its movements are fixed due to the less manipulators in the body frame. If we need more movements, we need to add more manipulators in the body frame of gripper. The modeling would be expanded by the inclusion of more manipulator links to increase the equations of the end effector. The designed dual controller approach is capable to handle multiple manipulations and we will use this same scheme for our future work to increase the manipulators. In future, we will consider vision-based tracking and grabbing of objects.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 61573097 and 91748106, in part by Key Laboratory of Integrated Automation of Process Industry (PAL-N201704), in part by the Fundamental Research Funds for the Central Universities (3208008401), in part by the Qing Lan Project and Six Major Top-talent Plan, and in part by the Priority Academic Program Development of Jiangsu Higher Education Institutions.