
Abstract
Most of the researchers are focusing to bring automation in mechanical systems. So, current research work presents a mechatronic system called active hydrostatic journal bearing that is a higher demand of fast-growing industrial needs. The objective is to improve the dynamics and static characteristics of hydrostatic journal bearing. To achieve the objective, a feedback servo controlled system is presented. A mathematical model is proposed for newly proposed active hydrostatic journal bearing with servo control. A comparison has been performed between the active hydrostatic journal bearing and traditional/conventional hydrostatic journal bearing under the influence of different dynamic conditions of load, viscosity, speed, and pressure. The results demonstrate that proposed active hydrostatic journal bearing has better performance, including controllability, stability, faster response, higher stiffness as well as better disturbance rejection. To further enhance the performance of proposed active hydrostatic journal bearing, two different control strategies are proposed such as proportional–integral–derivative and intelligent control. The results show that fuzzy logic–based intelligent control has faster response, greater amplitude reduction, and good stiffness against load. So, it shows that role of active lubrication in hydrostatic journal bearing will have potential applications in high load and high speed.
Introduction
It has been long time that hydrostatic bearing is an integral part of rotary equipment for their precise and accurate control. These types of journal bearing have advantage of greater position accuracy, low friction, and enhanced stability. The demand of rotating machines is increasing with passage of time. The higher demand of sophistication has made it critical to improve performance of rotating machines by developing active devices that aim to improve dynamic behavior and control vibrations. Researchers have proposed different types of active devices such as active bearing with flexible sleeves, 1 hydraulic actuator bearings, 2 piezoelectric bearings, 3 magnetic bearings, 4 variable impedance bearings,5,6 and active lubricated bearings.7,8 Active lubrication is thought to be the ultimate solution for high-speed and clean environment by some researchers. Active lubrication overcome common problems of low damping and poor load-carrying capacity, which often decrease stability and efficiency.9,10 To control the dynamics of shaft, active bearings work by changing fluid film around journal. Researchers have proposed different methods to provide active lubrication; some of them are given in the following literature. In 1992, the researcher Horikawa 11 introduced the method to control shaft’s dynamics by modifying the location of four pads by employing the piezoelectric actuators. Initially to control the dynamics of shaft, the bearings were mounted on different types of actuators and control system was not direct.12,13 It means that different types of actuators were used such as electromagnetic and hydraulic to move housing of bearings. As a consequence, there appears to be a change in the thickness of fluid film gap and hydrodynamic conditions . In order to achieve these objectives, control system must hold the rotor and bearing housing itself that demands actuator must be very robust. This was observed as a drawback when equipment was heavy such as compressor, turbo generators, and turbo turbines. An alternate solution was proposed that was to locate the actuator positions inside tilted pad bearing somewhere in hydraulic chamber that results in altering dynamics of machine rotor system. 14 Such type of bearing had disadvantage of structural limitation and chamber complexity. Hence, injection of oil directly into pocket of bearing began to be investigated because of simplicity of project.15–17 An active hydrostatic bearing was developed 18 which uses servo valve to control active lubrication in the pockets of hydrostatic bearing through traditional proportional–integral–derivative (PID) control techniques. Thus, hydrodynamic pressure and temperature may be changed among different pads.19–21 The vibrations due to shaft’s rotation can be decreased by control techniques. 22 The active lubrication plays an important role to improve load-carrying capacity of hydrostatic bearing, but still conventional lubrication is the main source for load-carrying capacity. The active lubrication reduces cross-coupling effect in orthogonal bearings when it enters radially. 23 Slim tried to enhance the dynamic characteristics such as the rigid rotor’s stability and rigidness of fluid film by studying the dynamic performance of the misaligned rotor. 24
Satish et al. 25 observed the phenomenon of wear and tear on a hybrid conical journal bearing which has four recess. The research outcomes of this study suggested that with the help of augmented radial position accuracy of conventional hydrostatic journal bearings, one can affect the performance of bearing under operational conditions. Some efforts were made to control the fluid film gap in hydrostatic journal bearing using different control techniques.26,27 Operational conditions always have influence on behavior of journal bearing. So, previously mentioned literature shows that to enhance dynamic characteristics of hydrostatic bearing under harsh operational conditions is trending research topic in recent days.
Significant improvements can be made in improving dynamic characteristics of hydrostatic journal bearing by using active lubrication that is accomplished with the help of compensation device. Controlled active lubrication plays an important role to improve fluid film stiffness, resistance against impact load, rigidity, and stability of rotor’s system, and reduce eccentricity. Numerous kinds of actuators such as magnetic, piezoelectric, and hydraulic are employed as active devices to control the vibrations in a rotor.28–30 The Morosi and Santos 9 have successfully investigated that it is similar to apply active lubrication for aerostatic bearing. The Santos and Watanabe 31 used active lubrication to increase damping coefficient and reduce cross-coupling coefficient in hydrostatic journal bearings. By doing this, they have significantly augmented the threshold for getting better stability of the hydrostatic journal bearing. Nicoletti and Santos 28 used a feedback controller to control the vibrations in hydrostatic journal bearing. Control is tuned with the help of gain parameters. Ho et al. 32 worked and performed stability analysis for rotor of magnetic thrust bearing. Nicoletti and Santos 33 researched on the investigation of the frequency response of tilt-type active hydrostatic bearing. Estupinan and Santos 34 successfully investigated multi-body systems. These systems were interconnected through thin films of fluid. A mathematical modeling is derived, and the result showed that the system can be controlled with different types of actuators. Haugaard and Santos 35 and Nicoletti and Santos 33 investigated numerically the active lubrication of tilting-pad journal bearings. The use of hydrostatic bearing is increasing in precise equipment. Extensive use of hydrostatic bearing demands higher performance and reliability. Santos and Watanabe 31 researched on the enhancement of the threshold and stability as well as studied the feasibility of reduced vibrations numerically. It is true that most of the researchers have researched on this area, but no one has worked for controlling precision and positional accuracy of shaft in a hydrostatic journal bearing under different operating conditions. After briefly reviewing the available literature, we could not find any tangible research studies on the behavior and characteristics of the active journal bearing under the influence of different operating conditions of pressure, temperature, spindle speed, and external load. Current research deals with these types of issues, and authors have tried to fill this potential gap and investigated the effects of operational conditions on the dynamic characteristics of active journal bearings in real time to identify accurate control of shaft eccentricity/position accuracy.
In the current research, to grasp the goal, first a mathematical model of servo controlled hydrostatic bearing is derived. Furthermore, two control strategies have been proposed to check effectiveness of proposed mathematical model such as fuzzy logic–based intelligent control strategy and PID control strategy. Experiments are performed for active hydrostatic journal bearing, but inaccurate experimental data led us to compare numerical results of active hydrostatic bearing with experimental results of conventional hydrostatic bearing. Results show the effectiveness of proposed system.
Working principle
A schematic for proposed system consists of active hydrostatic bearing. The proposed system is shown in Figure 1.
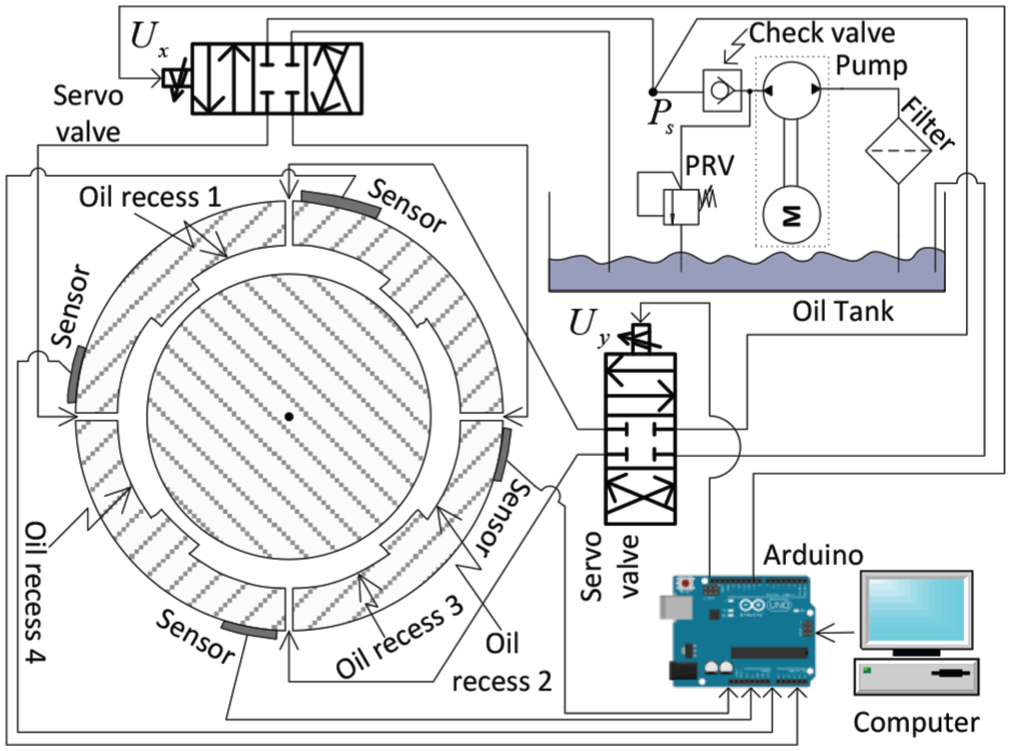
Explanation of hydrostatic journal bearing connected to feedback servo control.
In order to support external load, a thin layer of oil is created and maintained due to the external pressurizing source of oil such as a pump. Active lubrication is provided by the servo feedback valve. Eccentricity is measured in terms of bearing clearance along horizontal and vertical directions with the help of displacement sensors. Program code is transferred from Simulink to Arduino through USB interface port of the computer. Two-stage servo valve is used; the reason is that, in the first stage, it amplifies current/voltage signal to overcome some forces such as frictional forces and forces which are responsible for acceleration and vibration while in second stage torque motor indirectly move and position the spool of servo valve. Flow modulated by the spool of servo valve, which is driven by the magnetic field of torque motor. PRV is a type of pressure relief valve and used as a safety device, so that pressure cannot exceed from certain value.
Problem formulation for coupled system
The hydrostatic journal bearing is preferred due to separation of journal from bearing surface under all types of external load and speed. Hydrostatic bearing has advantage of less wear and friction under low speed and starting torque conditions. Performance of active hydrostatic journal bearing is to be influenced by oil film thickness gap that is formed between journal and bearing inner surface. Throttles are devices which are responsible to maintain this gap under different dynamic conditions. These devices have a big influence on the effectiveness of hydrostatic journal. There is a big problem with fixed throttlers such as their efficiency is limited with respect to stiffness and load rejection properties. This article uses servo valve as a variable throttling device to solve this problem of fixed throttlers and provides good stiffness and load rejection characteristics.
Modeling for active hydrostatic journal bearing system
Servo valve is most important and has faster response. These characteristics make it a suitable component for designing mechatronic systems. Its dynamic characteristics can be presented as first order to higher order transfer function.36–41 Servo valve controls the flow. The factors like frequency, gain, and damping are acquired from manufacturers.42,43
Let’s suppose nonlinearities are ignored to derive mathematical model for electrohydraulic servo valve (EHSV). A mathematical relationship is derived in Rehman et al.38,39 to describe current which basically. represents input (

The process, which is controlled by EHSV, involves equations such as pressure and flow, and these equations are nonlinear. So, there is a need for linearized analysis that must be done. Machine computation would be a big assistance to find solution of such nonlinear equations, but the result can only be applied to a system when numerical values of the coefficients are assumed. If the nonlinear solution is obtained, still there will be some ambiguities due to interpretation of data, design procedure and performance specification are based on linear theory. So that is why linearization is important, but one should take into account to investigate all operating points for variables. Let’s suppose if there is allowance which is made for the ranges of parameter values that a parameter can assume because of different operating points, then linear analysis is not unduly restrictive. Corresponnding flow though recess are denoted by Q2 & Q4 for horizontal recess and Q1 & Q3 for vertical recess repectively that can be denoted by a nonlinear relation for a zero lapped servo valve as;

Similarly for Y direction,

where

Flow is often due to the application of pressure at one end. Shear stress is one of the reasons, which cause the restriction in the path of fluid flow between two circular surfaces. The motion of the journal in hydrostatic journal bearing produced surface velocity. Surface velocity is zero at boundary surface and increases to a maximum value, where center of oil film thickness is present, as shown in Figure 2.
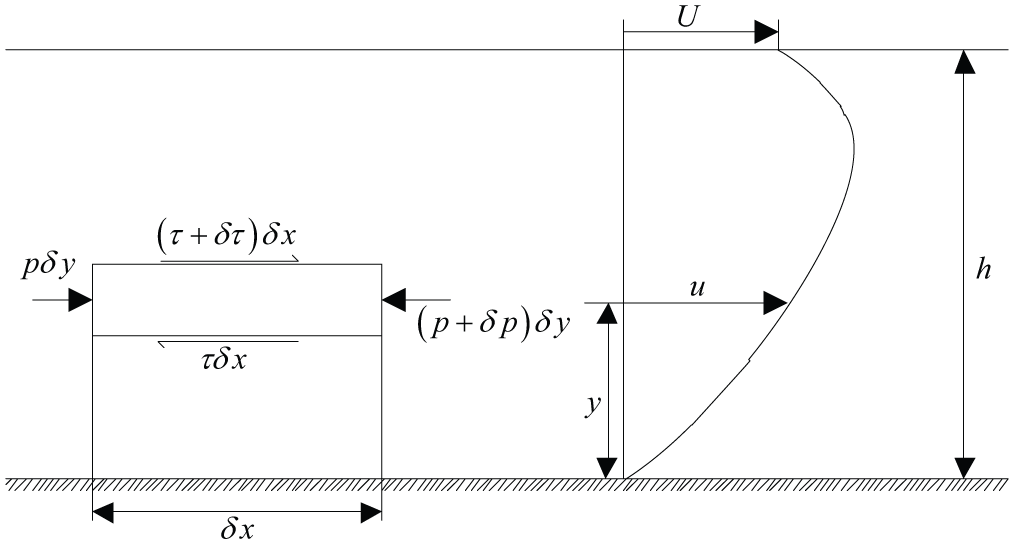
Combined pressure and velocity-induced flow.
Let’s suppose there is an assumption that pressure across the flow is constant such that

which leads to

Substituting

Integrating and applying boundary conditions, that is,

Flow rate is integral of velocity, which is given by

Suppose that there is a recess of width

Equation (9) is very useful; this is used to get flow due to pressure and surface velocity. The pressure is generated due to external source of pumping, while surface velocity is generated due to relative motion between the journal and the bearing surface.
Fluids are thought to be incompressible in a lot of applications and daily calculations, but in applications where there is dynamic load of higher frequency, such as in the case of hydrostatic bearing, compressibility factor becomes prominent and it cannot be ignored. Compressibility has good effect on stiffness and damping of bearing. Compressibility of a fluid depends upon its bulk modulus of elasticity. The relationship between change in pressure and change in volume is given by

Rearranging equation (10) and taking changes according to time

Rate of change of volume is often called compressible flow; if this rate is due to external load such as in the case of hydrostatic journal bearing, then this will be called compressible flow for hydrostatic bearing, so equation (11) takes new form which is given by

Flow through bearing will be linear when the shaft is under central position and flow is streamlined. Assume hydraulic pipes are thick and friction effects within pipe can be ignored. Furthermore, fluid temperature and elasticity’s modulus are constant. Then, continuity equation of flow for hydrostatic bearing can be used to get an overall flow equation for hydrostatic bearing,37,40,41 where flow delivered by servo valve is used by squeezing flow, compressible flow, and pressure velocity flow.
The dynamic equation of motion of a system depends upon bearing fluid film stiffness, arrangement of masses, and structure linkages. The performance of hydrostatic bearing for any value of eccentricity is normally described in terms of bearing coefficients. To illustrate the coefficients of hydrostatic bearing, consider a rigid shaft that is supported by oil film, which provides stiffness against external load, as shown in Figure 3. To support the load by oil film of fluid, the equations of motion for hydrostatic bearing are given by

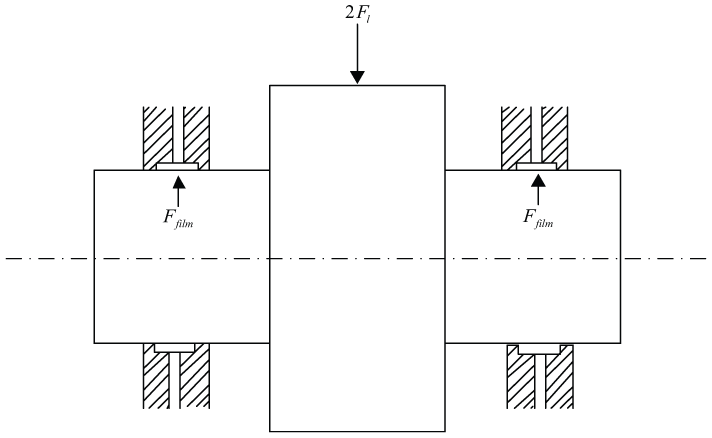
The Illustrations show how the hydrostatic bearing film may be considered in isolation from external force.
Design strategy
Current work proposes two design strategies for active hydrostatic journal bearing; one is PID controller and the other is intelligent control.
PID design strategy
PID controller is used in a lot of applications. It is preferred because it has simple structure and it is easy to implement. PID comprises proportional (that reduces rise time and makes the system faster), derivative (that smooths a signal with respect to time), and integral (that reduces steady-state error part of a signal). The input of PID controller is an error signal, while its output is a corresponding signal to the plant. Output signal and reference bearing clearance are compared to generate an error signal for PID controller. Servo valve is driven by a signal, which is provided by PID controller, as shown in Figure 4.

Block diagram of feedback system.
A work test bench is set up to perform experiments with different types of throttling devices such as capillary restrictor and servo valve, as shown in Figure 5.
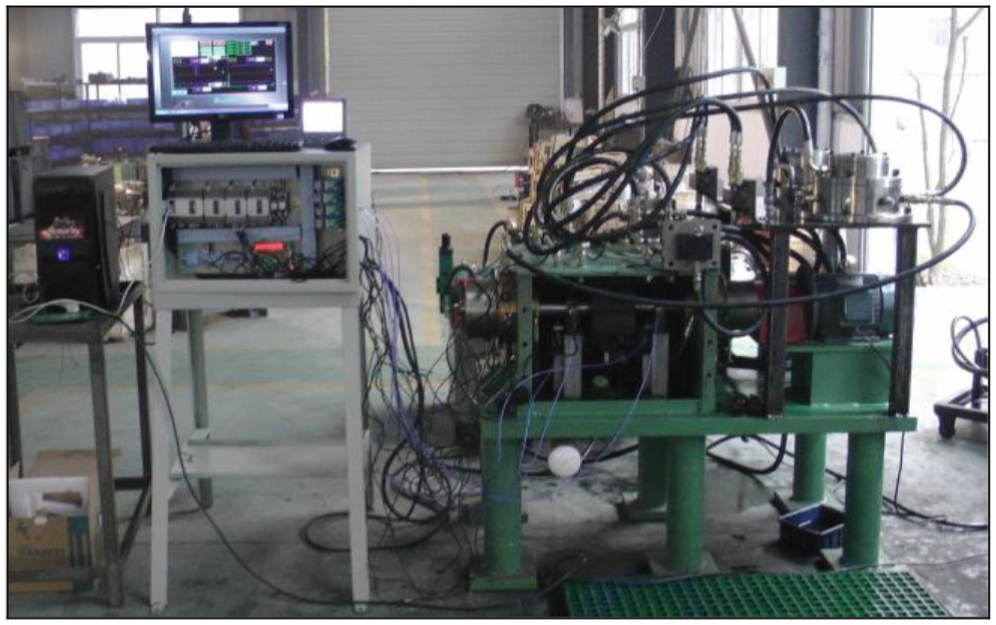
Experimental setup for hydrostatic journal bearing.
An algorithm is developed to find optimal parameters. A fitness function is employed to calculate accurate and precise values of controller parameters. The fitness function calculates sum of errors between current and reference values. It is given as

Proposed design strategy
To improve further performance of active hydrostatic journal, fuzzy logic–based intelligent control strategy is proposed. Fuzzy logic helps this strategy to deal errors and inaccuracies caused by external disturbances. The conventional PID controller is preferred in a lot of engineering applications and industrial process due to their simple design. Fuzzy logic is the best option for systems which have time delays, higher order, and nonlinearities, and the mathematical model is not accurate and precise. Keeping in view the problems of inaccurate, mathematical, poor load rejection and stiffness performance, a fuzzy logic–based intelligent controller is proposed in this article. The structure of the fuzzy logic–based controller is shown in Figure 6. It is basically a PID controller, where control gains are tuned according to fuzzy logic that is defined by fuzzy rules and member set functions. In Figure 6,
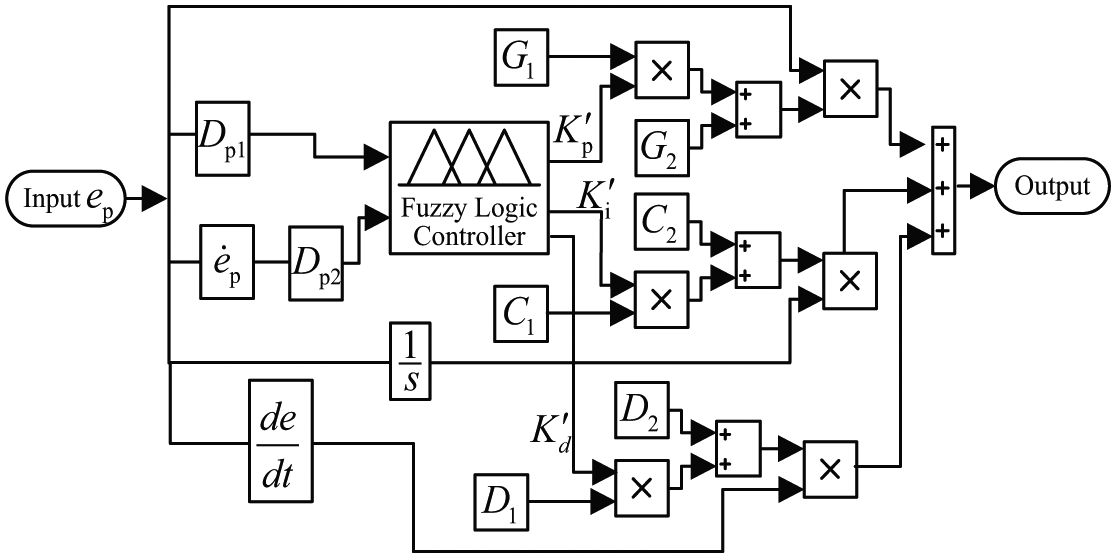
Structure of intelligent controller.
Fuzzy logic–based intelligent controller is just like parallel structure, where fuzzy logic is used in such a way so that the parameters of PID controller can be tuned according to defined member functions and rules. Fuzzy logic consists of four important sections:
The “rule base” keeps the information in the form of rules set given in Table 1, and each rule presents a certain state called member function, as shown in Table 2.
The function of inference mechanism is to evaluate and control rules. So, that fuzzy logic controller can make decisions.
The fuzzification converts input into a form that is suitable for comparison with rules.
The defuzzification changes the conclusions provided by the inference mechanism for the process.
Fuzzy rules.
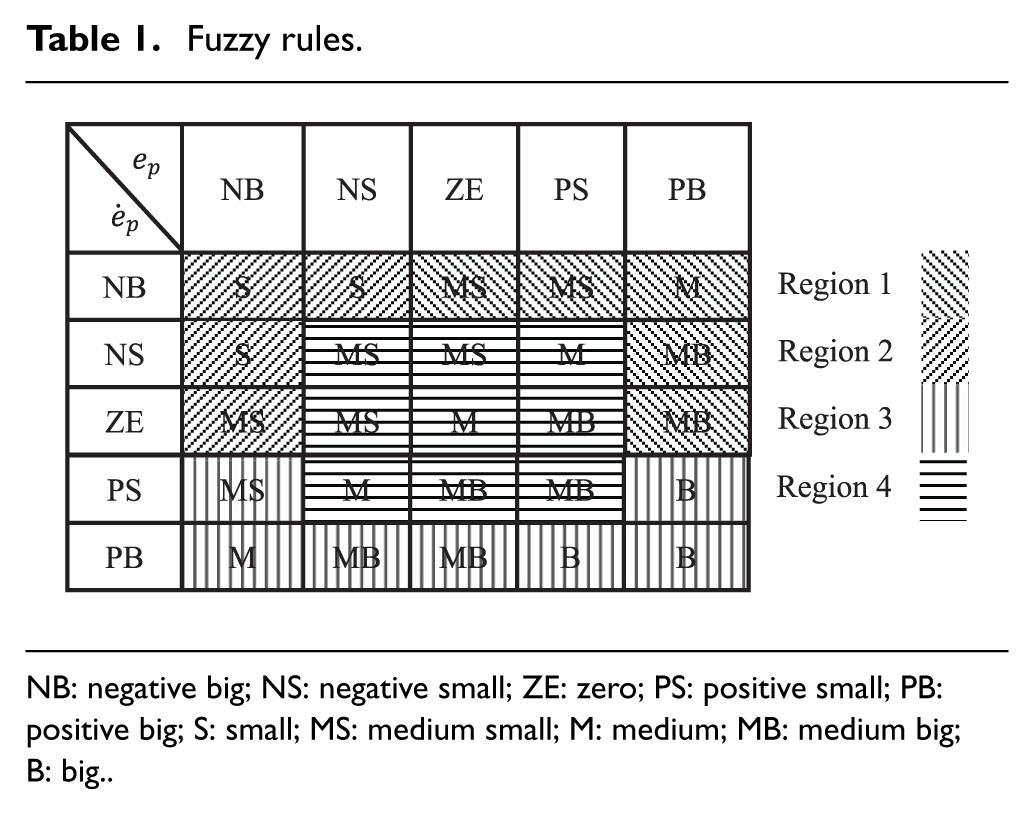
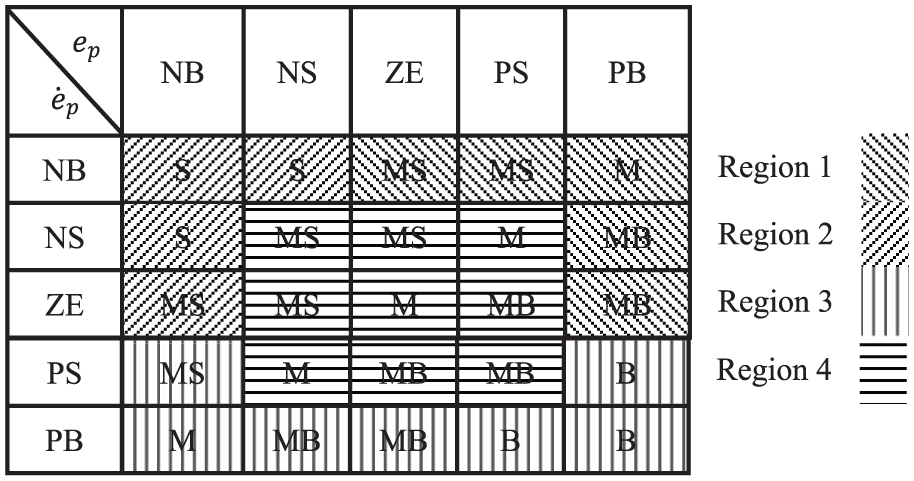
NB: negative big; NS: negative small; ZE: zero; PS: positive small; PB: positive big; S: small; MS: medium small; M: medium; MB: medium big;B: big.
Membership functions of the controller.
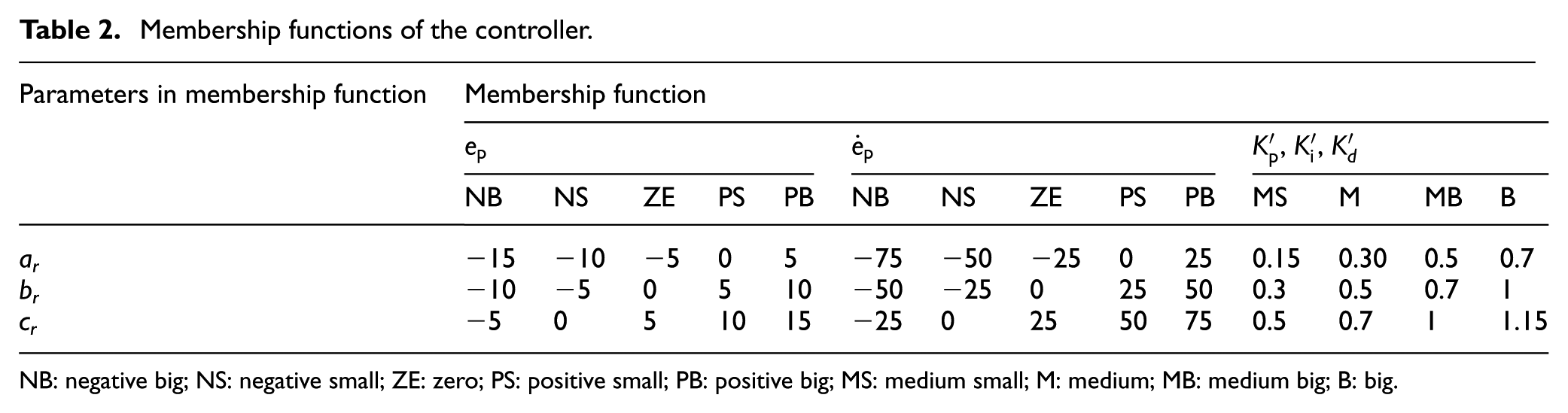
NB: negative big; NS: negative small; ZE: zero; PS: positive small; PB: positive big; MS: medium small; M: medium; MB: medium big; B: big.
Fuzzy logic–based intelligent controller uses a triangular member function which has general formula
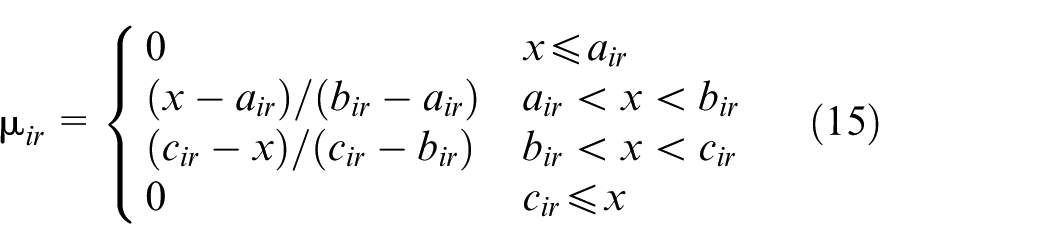
where
In this article, output and input are presented in the form of fuzzy sets such as NB (negative big), NS (negative small), ZE (zero), PS (positive small), PB (positive big), S (small), MS (medium small), MB (medium big), and B (big). Rules are defined according to the regions where region 1 represents rise times function of controlled system, regions 2 represents overshoots function of controlled system while region 3 and region 4 represents convergence and steady state function of controlled system respectively. Based on the information of
In order to produce effective output by controller, fuzzy rules are kept same, while member function values are changed. Membership functions for different parameters are given in Table 2.
Let’s suppose the range of parameters
They may be regulated by means of an adjustment mechanism

where the subscript
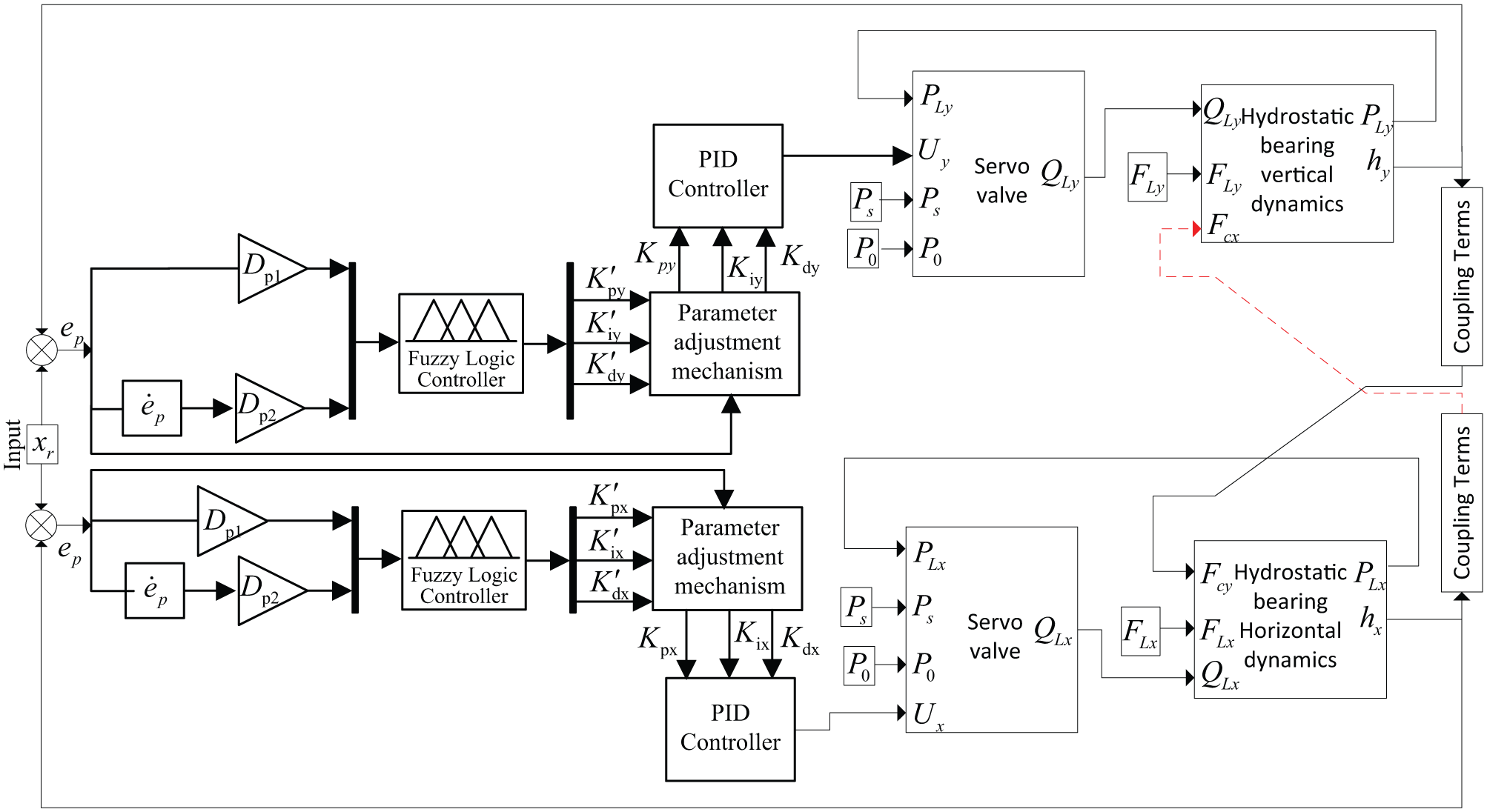
The proposed strategy for controlling horizontal and vertical dynamics of hydrostatic journal bearing.
Stability analysis
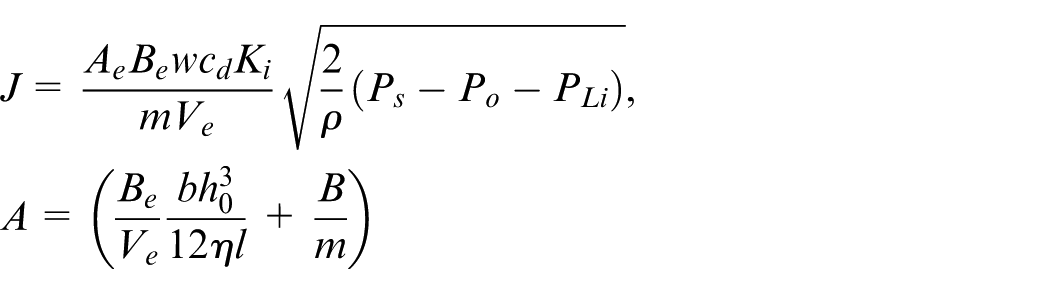
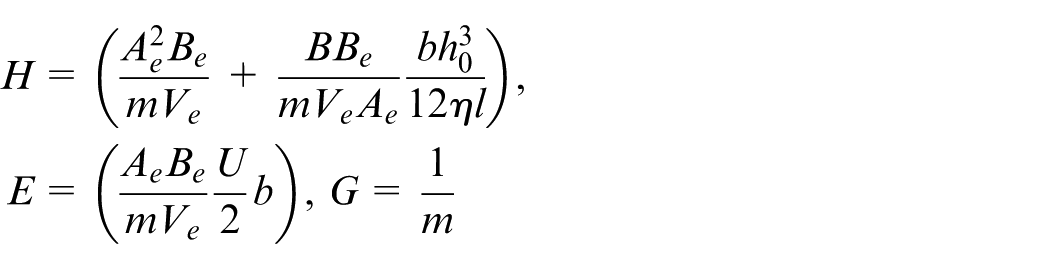
The equations which are used to get whole mathematical model are
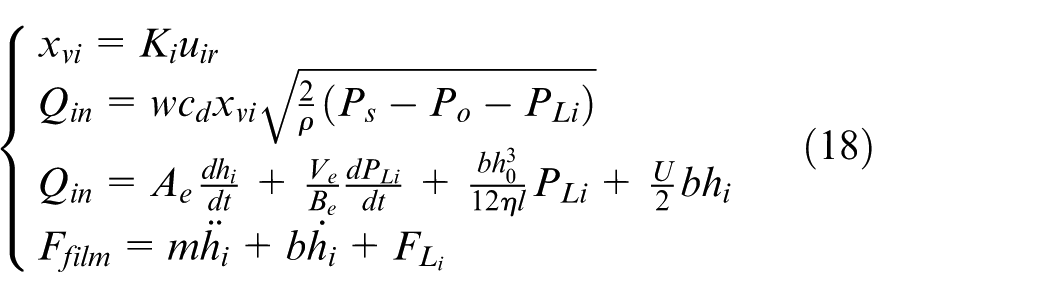
Let’s suppose states variables are
where

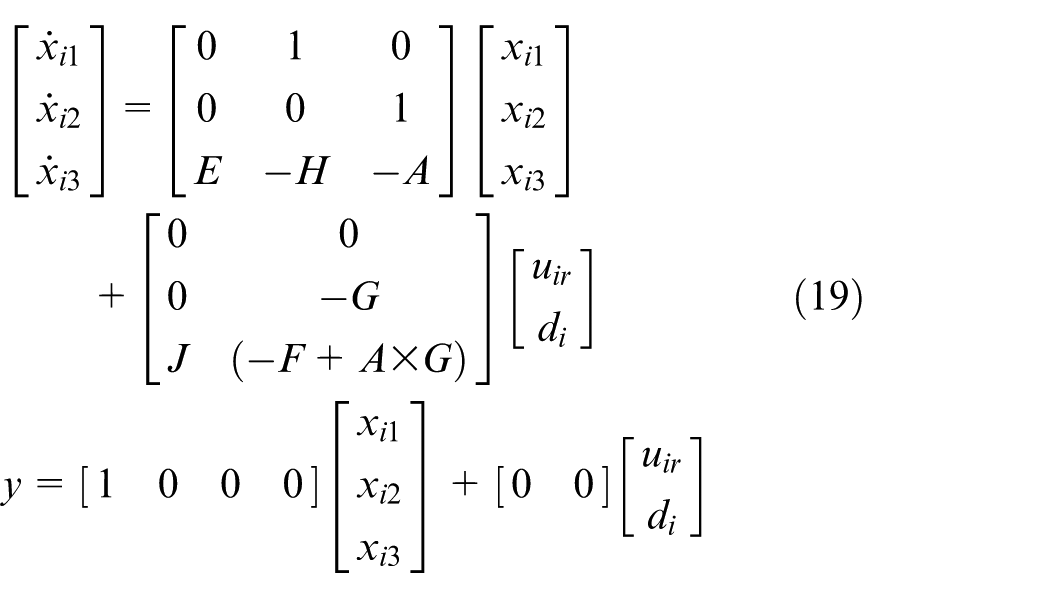
The state space equation that describes a nonlinear system is given by

The value of state vectors in equation (20) can be found by comparing equation (20) with equation (19).
Stability analysis theorem which has been used here to check stability of proposed system is based on Lyapunov’s theorem.44,45 The theorem ensures the asymptotic stability for the system which is given by equation (20). This section discusses the stability with the help of stability theorem. It will use some variables for certain functions to emphasize their presence.
One can describe quadratic positive definite Lyapunov’s function as suggested in equation (21)

where
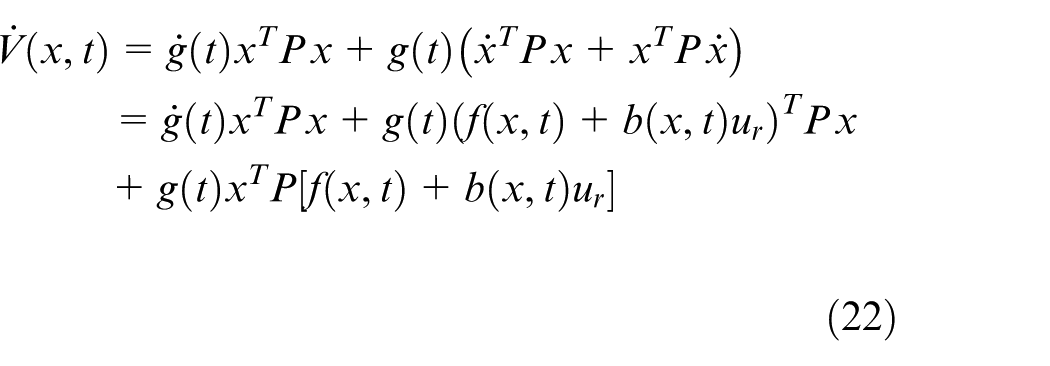

where
Stability theorem
Consider fuzzy control system described by equation (20). Let


where
Simulation results and discussion
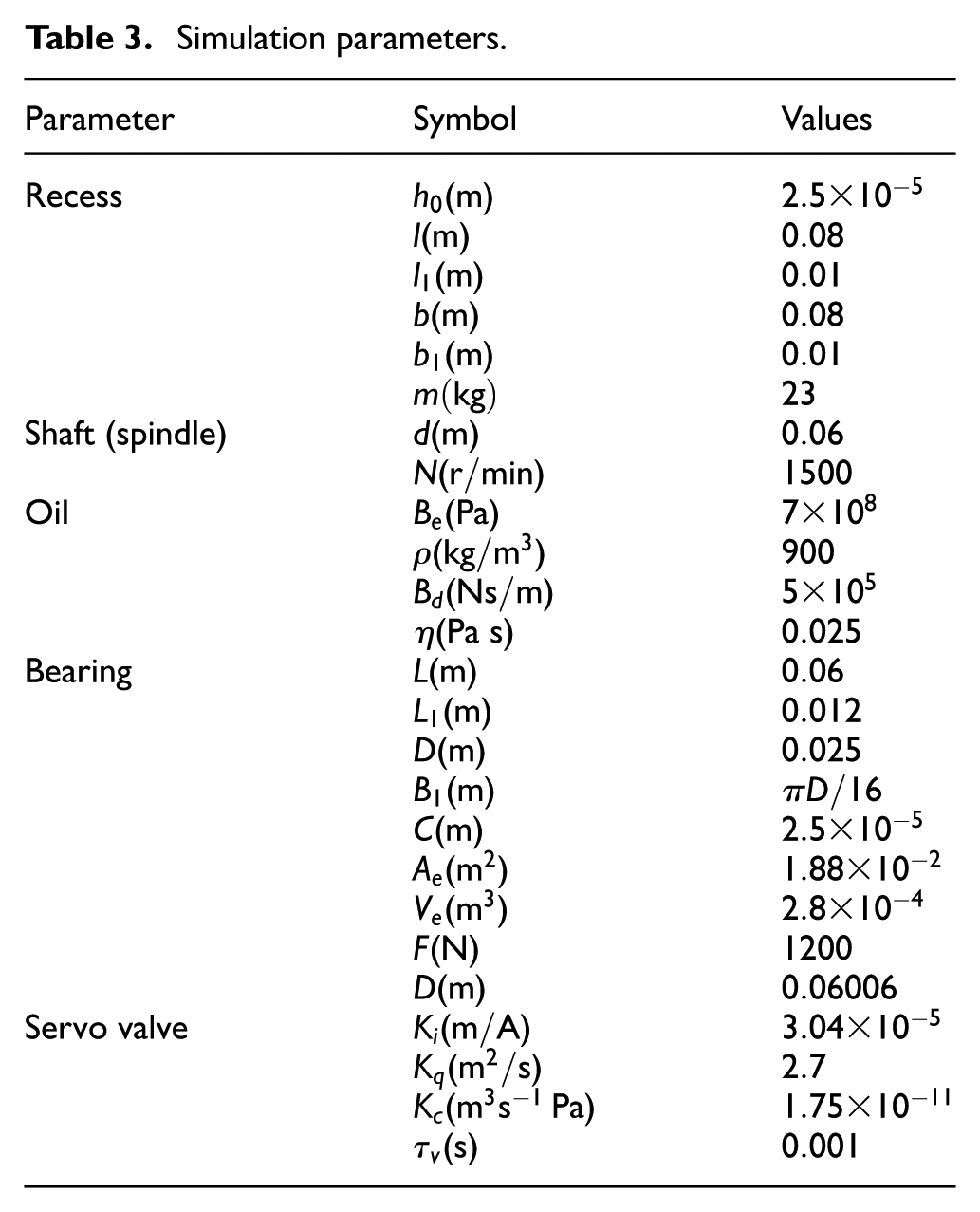
To investigate the effectiveness of proposed technique, experiments are performed in MATLAB/Simulink using parameters provided in Table 3. Simulations are performed under different dynamic conditions that are explained in the next section.
Simulation parameters.
Influence of initial oil pressure
Hydrostatic bearing is an integral part of rotary machinery which is used in applications where high load and high speed is a demand. The performance of hydrostatic journal bearing depends upon the external pressure source. In other words, friction, wear, and load rejection performance of active hydrostatic can be improved by changing external pressures of hydrostatic journal bearing. The performance of hydrostatic journal is checked under different initial oil pressure. Experiments were performed with conventional hydrostatic bearing (capillary controlled hydrostatic bearing). The simulation results of the active hydrostatic bearing were compared with experimental results of conventional hydrostatic bearing. It is found when initial oil pressure increases, then gain value of recess 1 and recess 2 decreases with a corresponding increase in gain value of recess 3 and recess 4. Apparently, it is observed that the increase in initial oil pressure results in the improvement of load rejection properties and stiffness characteristics. Under different external pressure of 2 and 3 MPa, it is found that the change in bearing clearance for conventional hydrostatic bearing is
Influence of dynamic conditions on bearing clearance.
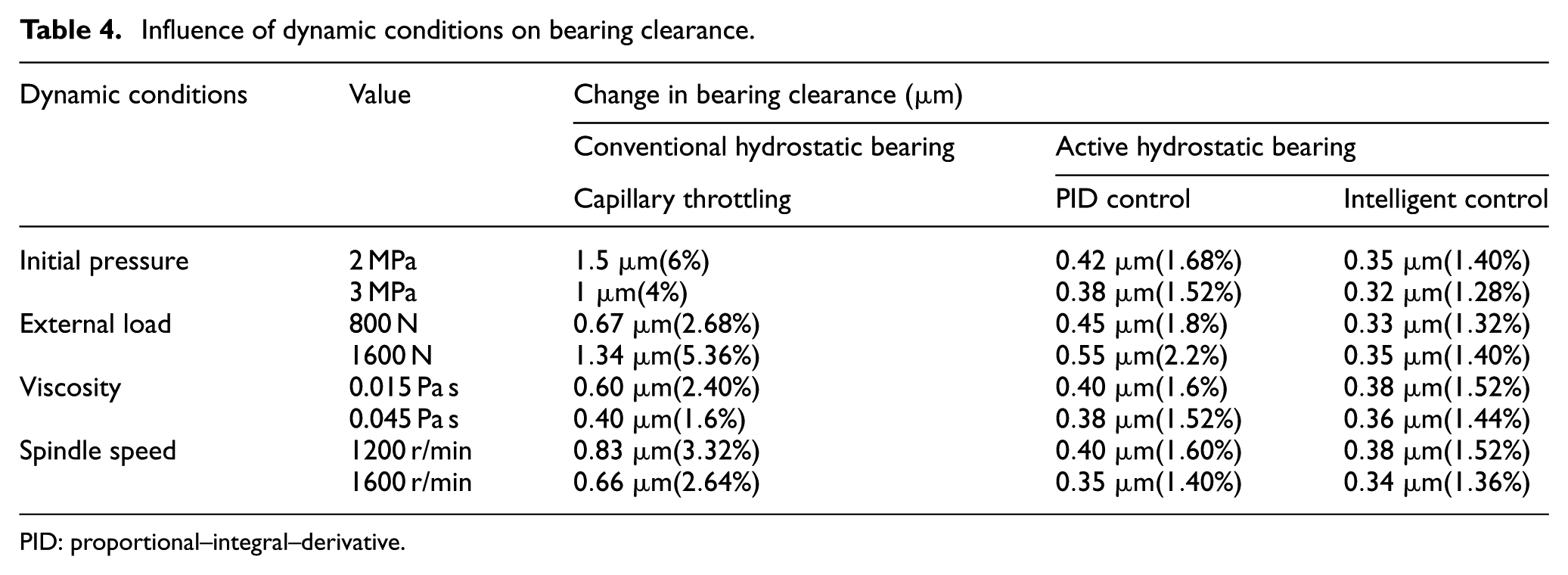
PID: proportional–integral–derivative.
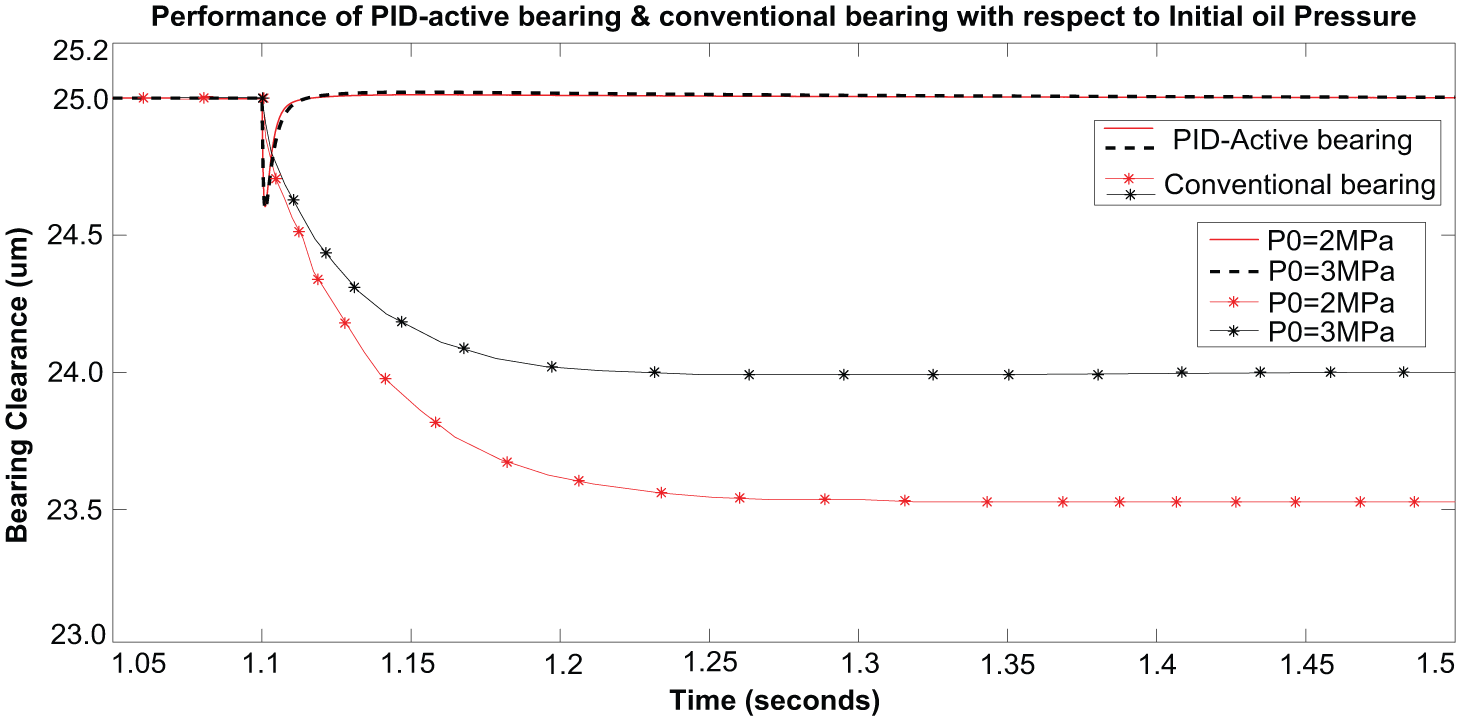
Influence of initial oil pressure on conventional and PID-based active bearing.
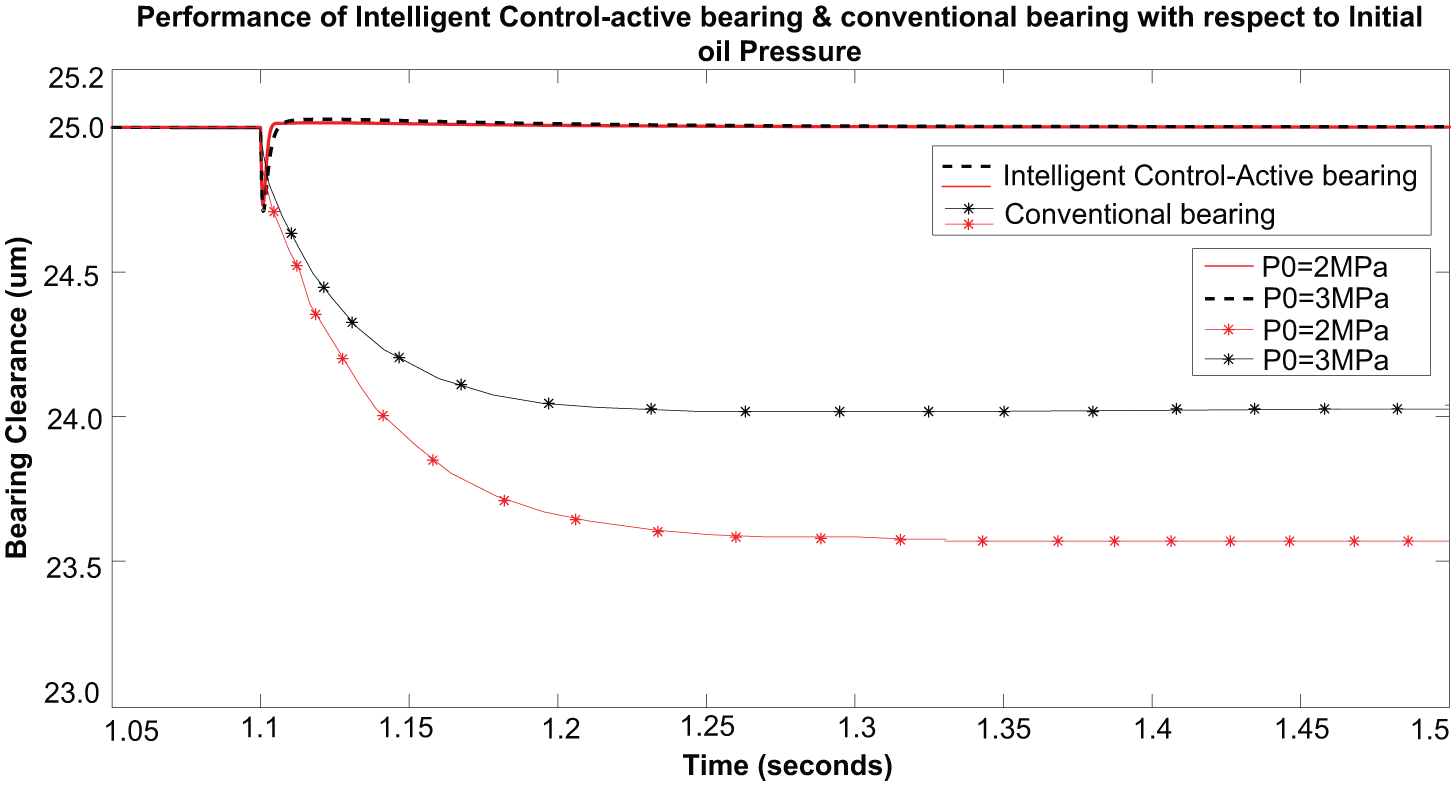
Influence of initial oil pressure on conventional and intelligent control–based active bearing.
Figures 8 and 9 show that conventional or traditional hydrostatic bearing always settled down with some amount of eccentricity under equilibrium condition while active hydrostatic bearing has zero eccentricity under equilibrium condition. This is due to the feedback control of active hydrostatic bearing that it helps to improve not only stiffness but also zero eccentricity under equilibrium conditions. In an active hydrostatic bearing, when load acts on the shaft, the film begins to oscillate. As a result, a deviation from the reference value
Influence of external load
The shaft or journal of bearing cannot quickly attain the original position after load being applied. This is due to the poor throttling effect, inertia, mass of bearing components, and low stiffness. There are two important components that are responsible for bearing efficiency. It is eccentricity and response time from “one position to another position to get back the original position called the equilibrium position.” Active lubrication controls bearing clearance in real time as well as control recess pressure. Active lubrication is controlled by servo valve, and provides system extra stability, good stationary, and rotational characteristics.
To investigate load rejection performance and stiffness characteristics, an external load of 800 and 1600 N is applied. The results, which consist of a comparison between the active hydrostatic bearing and conventional hydrostatic bearing, were compared in Table 4. Figures 10 and 11 show that active hydrostatic bearing under PID controller has better results than a capillary controlled hydrostatic bearing. The active hydrostatic bearing quickly regains its equilibrium position after applying a load, while, on the other hand, conventional hydrostatic bearing settled down with some amount of eccentricity. The value of eccentricity depends upon the value of the external load. Table 4 shows that active hydrostatic bearing under fuzzy logic–based intelligent control has the best results as compared to PID control. The change in bearing clearance against applying load for intelligent control is 1.32% and 1.40%, and for PID control is 1.8% and 2.2%, while for conventional hydrostatic bearing is found to be 2.68% and 5.36%. The change in bearing clearance is less for intelligent control strategy (active bearing) as compared to conventional bearing. It shows a big advantage of active lubrication for hydrostatic journal bearing under proposed control techniques. The result also shows that when load acts, the active hydrostatic journal bearing quickly achieves or regains equilibrium position, while conventional hydrostatic journal bearing always settled down with some amount of eccentricity. Furthermore, intelligent control has faster response to achieve an equilibrium position as compared to PID control for active hydrostatic bearing.
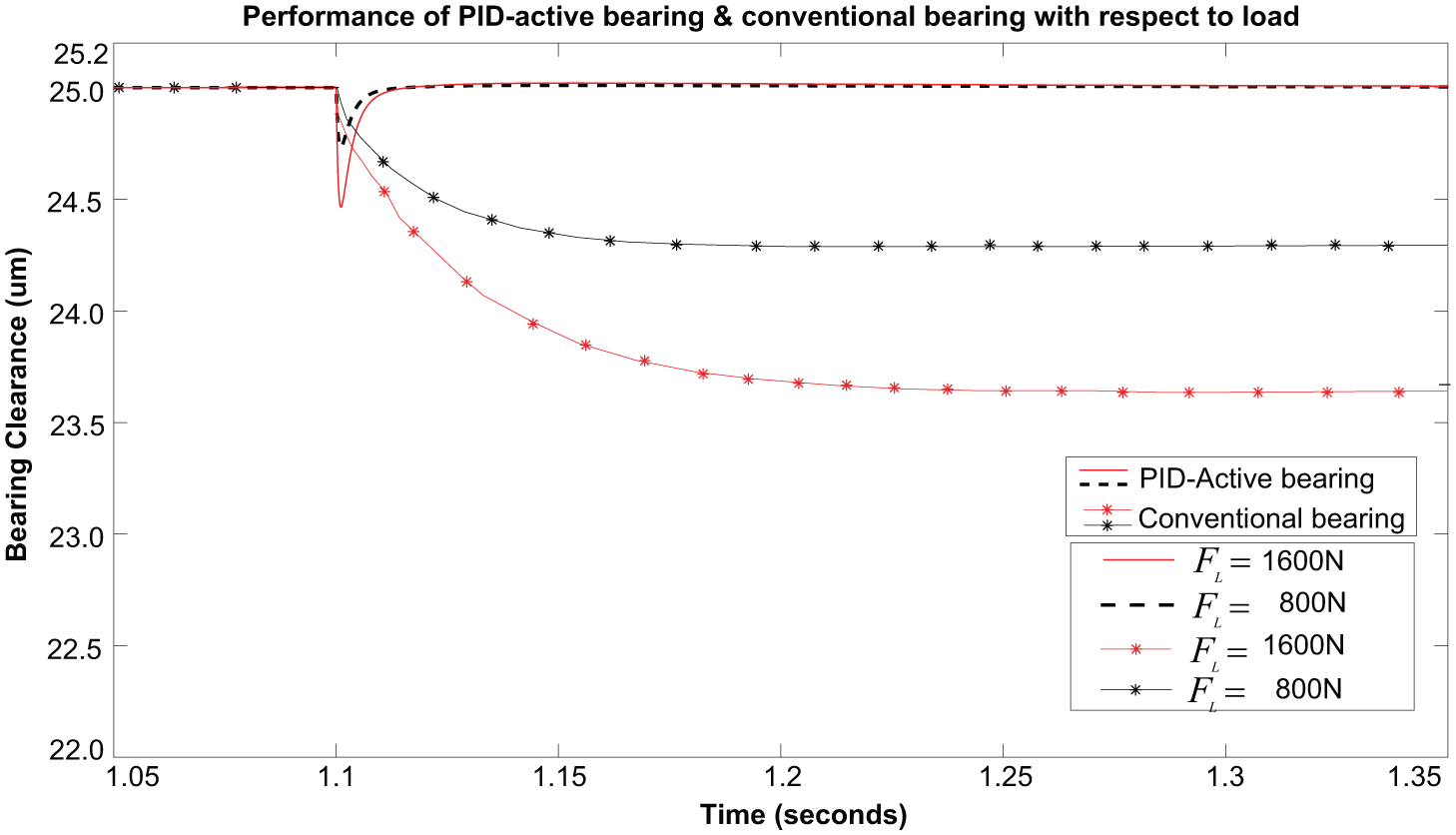
Influence of external load on conventional and PID-based active bearing.
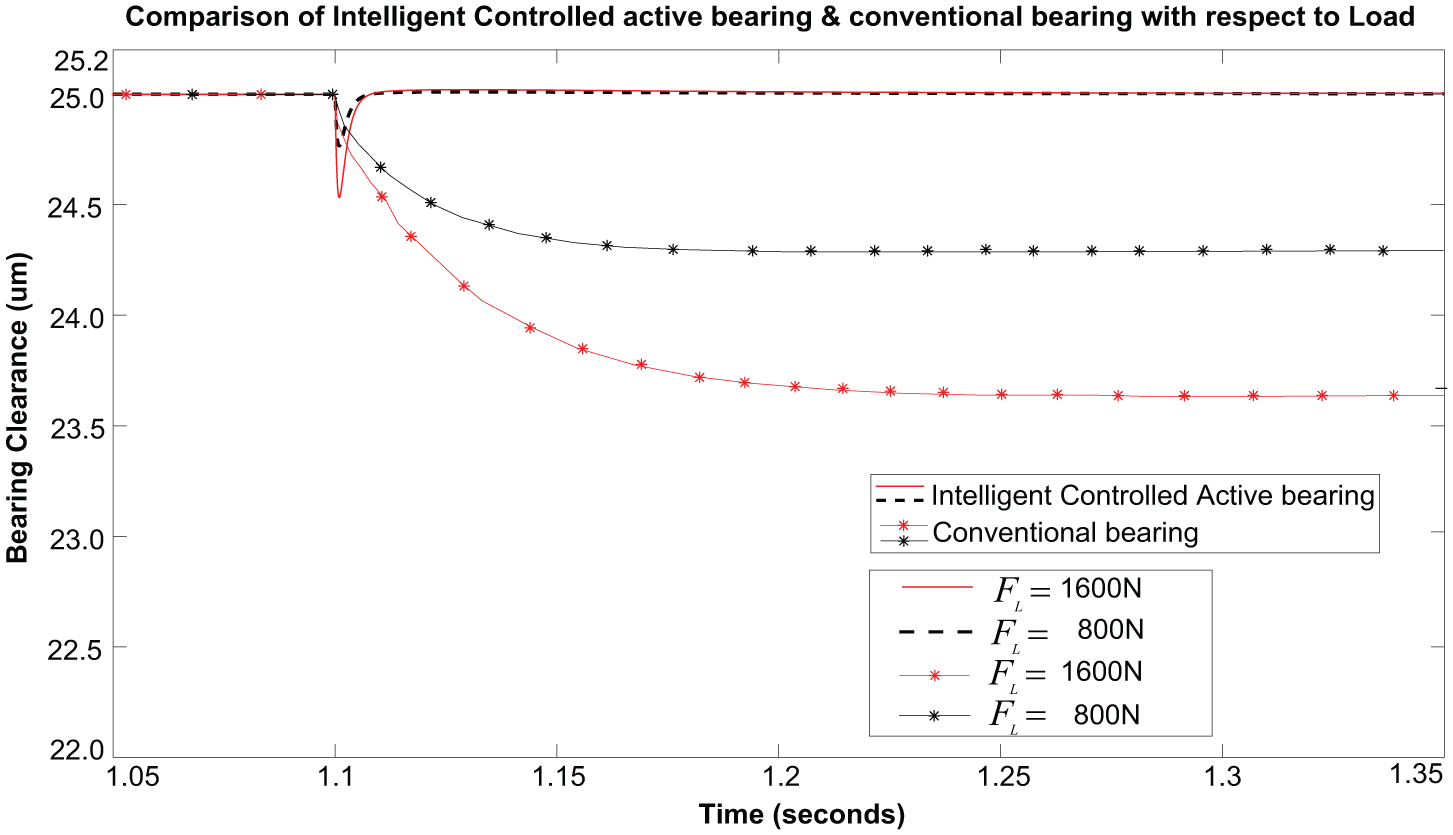
Influence of external load on conventional and intelligent control–based active bearing.
Influence of oil viscosity
The spindle or journal is separated from the inner surface of bearing through a pressurized fluid film of oil. This pressurized film produces bearing clearance that is important to be monitored. Hydrostatic journal bearing exhibits good characteristics such as low friction, less wear, better damping, and high stiffness due to a pressurized film of oil. Investigations reveal that the temperature has big influence on viscosity characteristics of the oil. When shaft runs under high speed and high load, it produces heat which can change the viscosity of lubricant due to high temperature; as a result, lubricant can impose restrictions and limitation on the positional accuracy of the shaft. The proposed active hydrostatic journal bearing has solved this problem. Active hydrostatic journal bearing monitors bearing clearance in real time; as a result, change in viscosity does not affect much more as compared to the conventional hydrostatic bearing. It can be seen clearly from Table 4, where a change in bearing clearance for conventional bearing is large while for active hydrostatic bearing is small, and whether the strategy is PID or intelligent control; both have better results than a conventional hydrostatic bearing. Furthermore, the results are explained numerically in Table 4 and graphically in Figures 12 and 13.
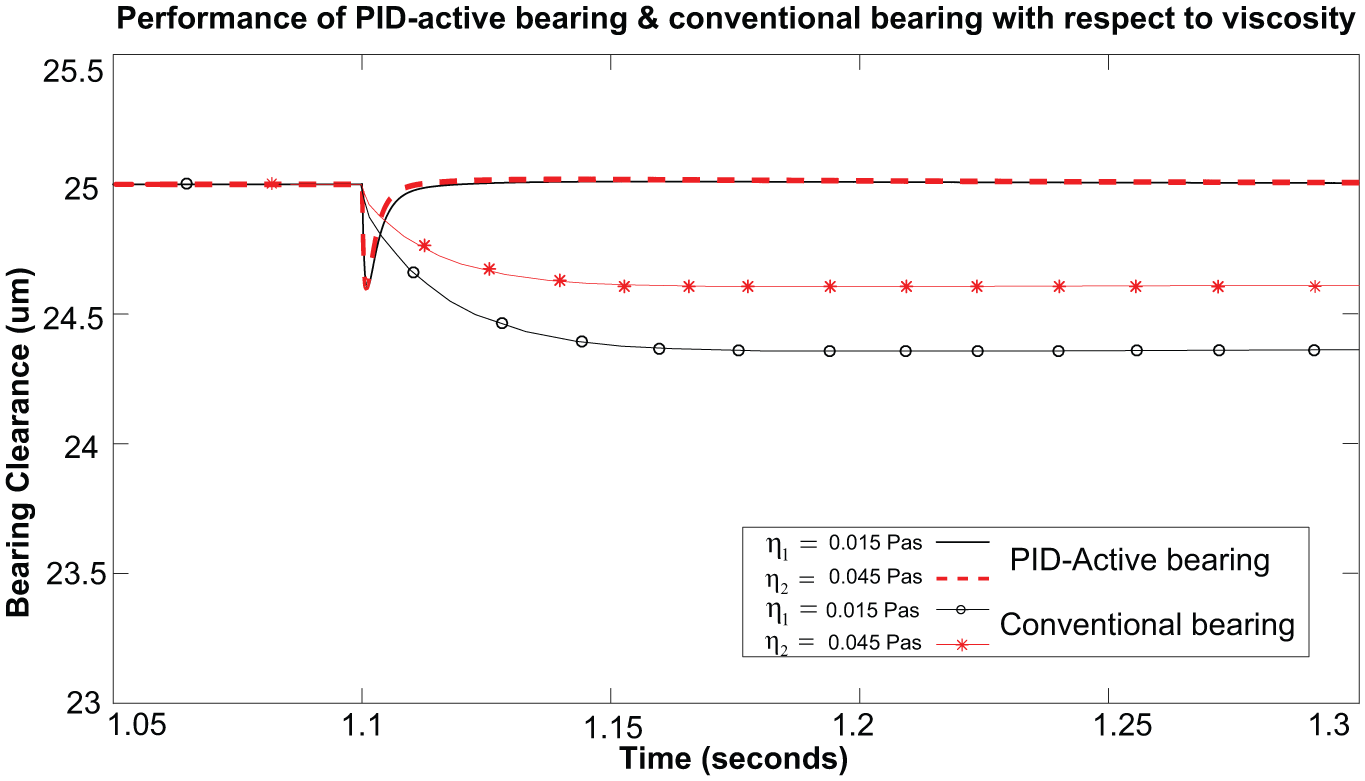
Influence of viscosity on performance of conventional and PID active hydrostatic journal bearing
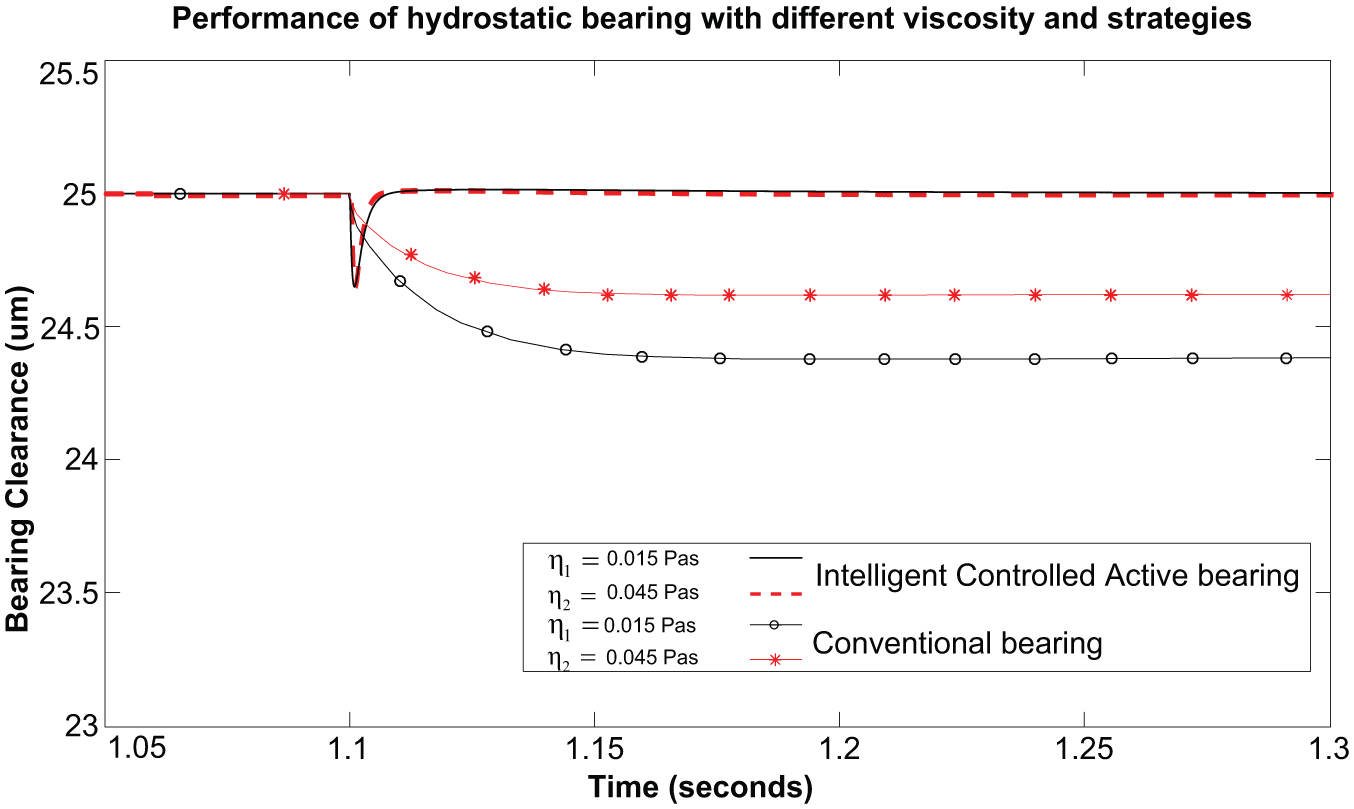
Influence of viscosity on performance of conventional and Intelligent Controlled active hydrostatic journal bearing
Influence of spindle speed
When the external load acts on the shaft, it produces eccentricity. Eccentricity under running condition at high speed produces fluid film oscillations that give birth to squeezing effect. Conventional hydrostatic bearing produces some amount of eccentricity, even after settling down to equilibrium position, while for active hydrostatic bearing, eccentricity is zero once the system is settled down to the equilibrium position. Squeezing effect is much more prominent in conventional hydrostatic bearing; the reason is that conventional hydrostatic bearing is controlled by a fixed throttling device called capillary restrictor while squeezing effect does not affect much more to the active hydrostatic bearing. The reason is that active hydrostatic bearing monitors bearing clearance in real time that helps system to reduce eccentricity. Squeezing effect increases with increase in spindle speed in the presence of eccentricity. So, that is why rotary machinery which is supported by an active hydrostatic bearing can work at high speed without facing the problem of squeezing effect. The effect of speed on hydrostatic bearing is explained numerically in Table 4 and graphically in Figures 14 and 15. On one hand, increase in speed has a disadvantage in the form of squeezing effect, while, on the other hand, increase in speed has good effect in the form of improvement in stiffness characteristics that help the system to improve load rejection performance. Actually, the high speed produces a hydrodynamic effect that helps bearing to improve stiffness and rigidity of oil film. It can be seen in Figures 14 and 15 that a change in bearing clearance is less under high speed.
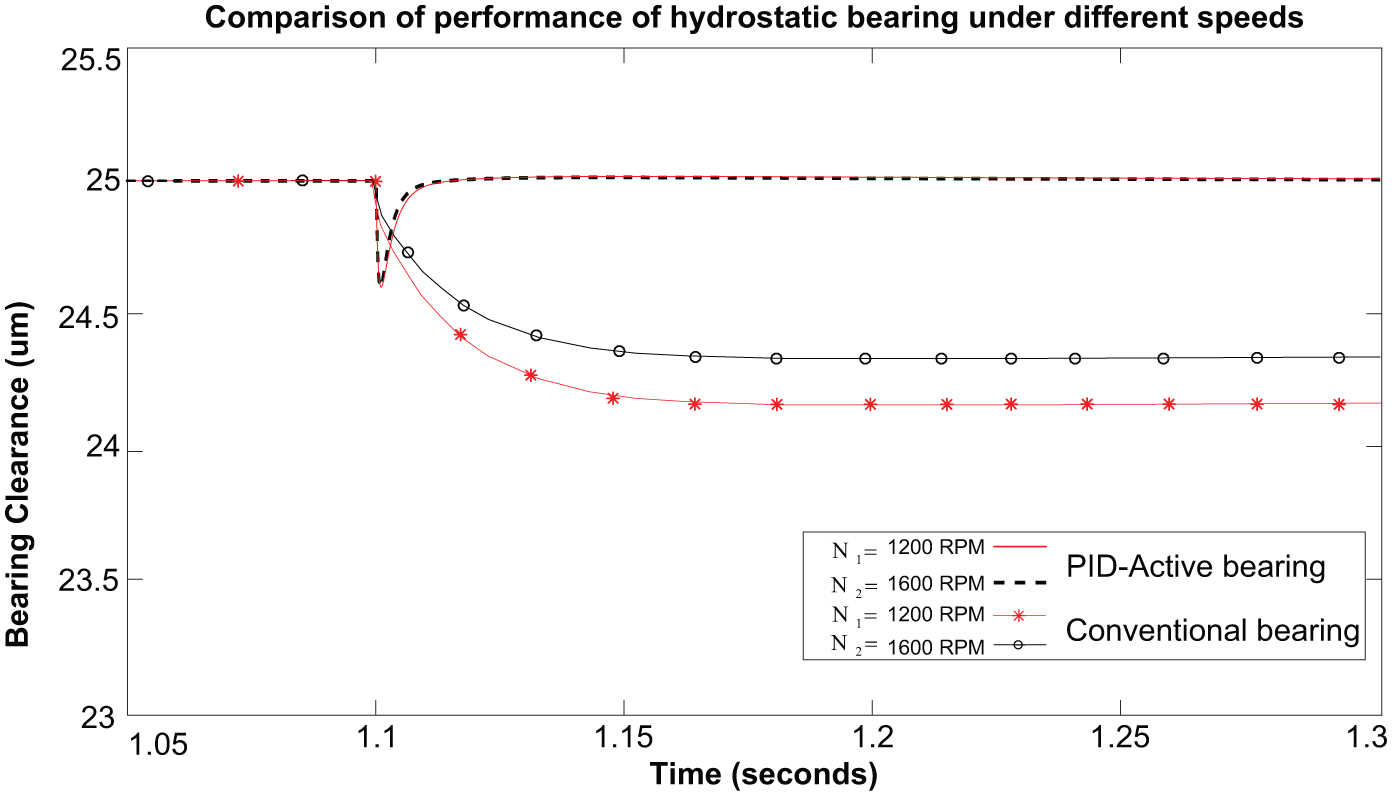
Influence of speed on performance of conventional and PID active hydrostatic journal bearing
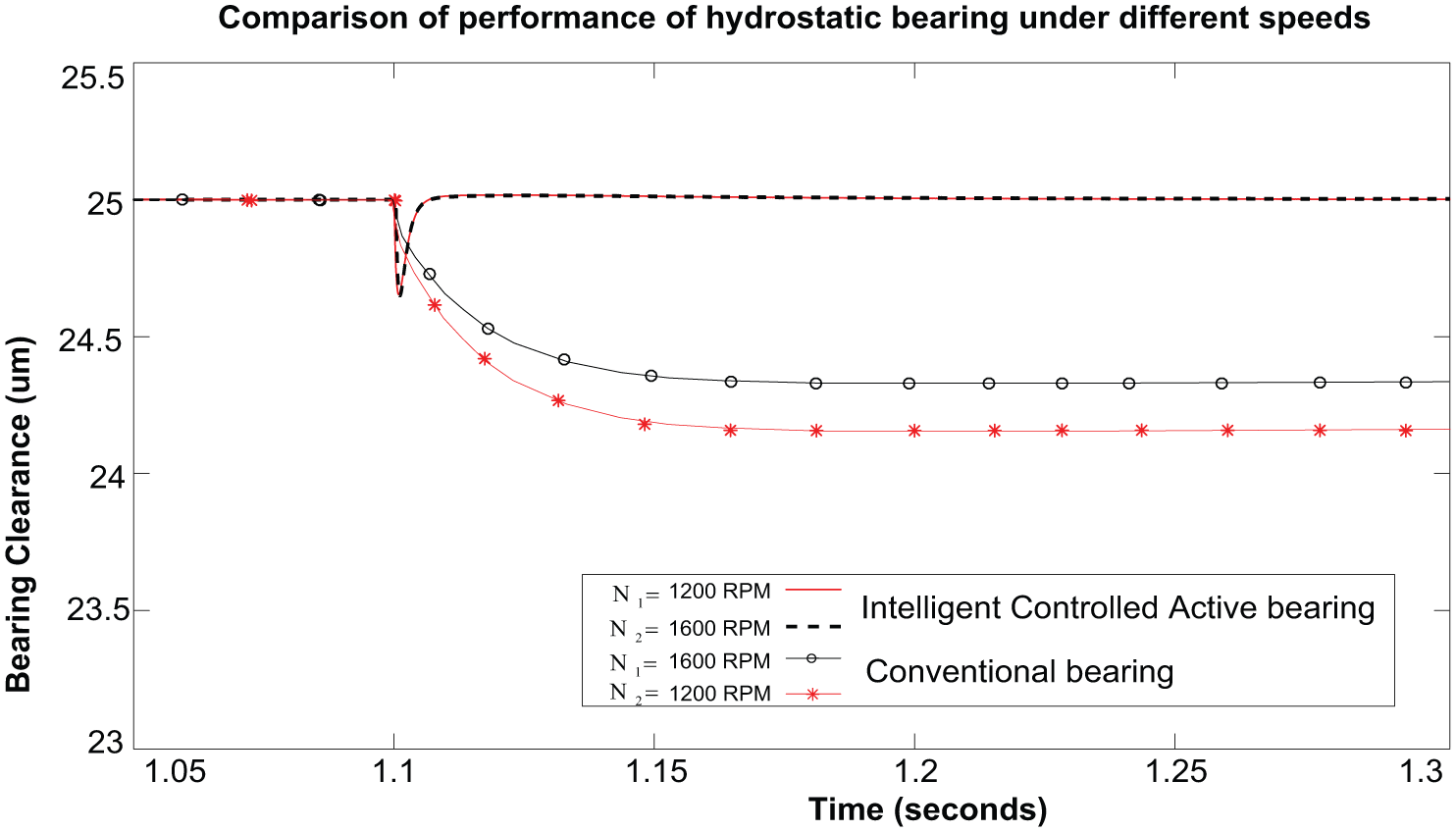
Influence of speed on performance of conventional and Intelligent Controlled active hydrostatic journal bearing
Conclusion
The present research work proposes a precise and an accurate mathematical model for an active hydrostatic bearing system accompanied with servo valve. In order to verify the effectiveness of proposed strategy, experiments were performed, but lack of experimental data led us to a numerical comparison of active hydrostatic bearing with experimental results of conventional hydrostatic bearing. A comparison has been done between the active hydrostatic journal bearing and conventional hydrostatic journal bearing which help to conclude the following conclusions such as active hydrostatic bearing has better static and dynamic characteristics under different conditions of temperature, pressure, spindle speed, and external load. The active hydrostatic bearing has the advantage of servo feedback control which monitors clearance gap in real time that results in greater positional accuracy of spindle, more threshold, and better stability. Furthermore, the proposed active hydrostatic bearing is checked under two different control strategies such as PID and fuzzy logic–based intelligent control. It is found that intelligent control strategy has better results in achieving equilibrium positions as well as shorter response time under different conditions of viscosity, pressure, external load, and spindle speed. Current research work involves numerical comparison, while future work will be to figure out the deficiency in test bench, so that effectiveness can be proved experimentally for the proposed work.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The research work is sponsored by State Key Laboratory of Mechanical Transmission, Chongqing University, and National Natural Science Foundation of China under Grant No. 51075409.