
Abstract
Background:
Piezoelectric actuators are widely used in many micro/nano-manipulation applications, but their positioning accuracy are badly affected by their inherent nonlinear hysteresis and creep. To solve this problem, this paper presents a new robust motion-control method for piezoelectric actuators with fast nonsingular terminal sliding mode based on time delay estimation.
Method:
The proposed controller needs no detailed information about the hysteresis and other nonlinearities of the system, leading to a simple and model-free characteristic due to the time delay estimation and ensures fast convergence and high tracking accuracy thanks to the nonsingular terminal sliding-mode surface and fast terminal sliding mode -type reaching law. A robust exact differentiator is adopted to estimate the velocity and accelerationinformation online, and it overcomes the limitation of only available position measurements. The finite-time convergence and stability of the closed-loop system are proved by using a Lyapunov function.
Results:
Experimental results show that the proposed control strategy has faster convergence and higher tracking precision compared with a traditional time delay control.
Conclusion:
The proposed control strategy can be widely used as an effective control method for high-precision motion control of piezoelectric actuators.
Introduction
As a typical representative in the field of smart materials, piezoelectric actuators (PEAs) have been widely used in many micro/nano-manipulation applications, such as optoelectronic engineering, micro-electro-mechanical system (MEMS) manufacturing, biological cell operations, and so on, thanks to their great advantages of high resolution, large output force, and fast response speed.1,2 However, due to the uncertain nonlinear factors such as hysteresis and creep of the PEAs, serious open-loop positioning errors are caused, which greatly degrades the control performance of the systems. 3 Therefore, designing an effective and feasible control strategy to overcome these nonlinearities has important research significance.
In order to suppress the hysteresis nonlinearity of the PEAs to achieve high-precision positioning, various control methods have been developed over the past decades. These methods can be roughly divided into three categories:4,5 feed-forward control, feedback control and feed-forward–feedback control. Among them, the feed-forward control approach is used to realize the linearization of the PEAs by establishing mathematical models of the hysteresis effect. The commonly used hysteresis models include Preisach model, 6 Prandtl–Ishlinskii model, 7 and Bouc–Wen model, 8 and so on. Since it needs complex parameter identification process and is difficult to obtain accurate models, the feed-forward control cannot completely eliminate the hysteresis nonlinearity in practical application. The feedback control method generally regards the hysteresis as an unmodeled uncertainty or disturbance and then suppresses it by constructing a robust controller without the detailed information of hysteresis model. In this paper, the feedback control method is adopted for an easy implementation. Specifically, sliding-mode control (SMC) technique is realized due to its effectiveness and robustness against the model uncertainties and external disturbances.
As a simple and effective nonlinear control method, the purpose of the SMC is to make the system-state trajectory confined to a defined sliding surface and then to intersect and stay on the manifold. However, in the design process of the traditional SMC, the control law is usually discontinuous, and easily causes the chattering problem. Moreover, the linear sliding-mode surface can only guarantee the asymptotic stability of the system states. To solve these problems, terminal sliding-mode control (TSMC) strategy has been proposed, 9 which uses a nonlinear sliding-mode surface to ensure the finite-time convergence. However, the existence of negative fractional power in the TSMC may lead to the singularity around the equilibrium point. 10 To eliminate the singularity problem in the TSMC, nonsingular terminal sliding-mode control (NTSMC) was proposed. 10 But the control discontinuity problem still exists in the NTSMC although the boundary layer method 11 is used to reduce chattering to some extent. To overcome the disadvantages of the NTSMC, a so-called fast nonsingular terminal sliding-mode control (FNTSMC) was first proposed in Yu et al. 12 It not only avoids the control chattering in essence but also guarantees faster finite-time convergence than the NTSMC can be achieved by using a fast terminal sliding mode (TSM)–type dynamic attractor. However, all the SMC and its improved forms need to know the boundary of uncertainties in design, which is not available in practical applications.
Considering the fact that the controller needed in practice must be simple, stable, and accurate, a time delay estimation (TDE) technique was proposed by Youcef-Toumi and Ito 13 for the first time. The TDE can effectively estimate the unknown dynamic model and disturbance of the system directly with the transient delayed information of the closed-loop system, leading to an attractive model-free nature. Its high efficiency and effectivity characteristics have been verified in many applications.14–17 Motivated by these benefits, the TDE technique is adopted to cancel the nonlinear hysteresis of the PEAs. To the best of our knowledge, there have been few literatures about the tracking control of the PEAs by combining the TDE with the FNTSMC.
To this end, this paper presents a model-free FNTSMC based on the TDE for precision motion control of a PEA system with nonlinear hysteresis. First, an NTSM surface is selected to ensure finite-time convergence when the system states are confined to this manifold. Then, the finite-time stability in the reaching phase is obtained by using a fast-TSM-type reaching law. Finally, the TDE is adopted to estimate and cancel the nonlinearities of the PEA without complex parameter identification of the system. Comparative experiments are carried out on a real PEA system. The results show that the proposed controller enables faster convergence and higher tracking accuracy along with better robustness against model uncertainty and external disturbance compared with time delay control (TDC).
The remainder of this paper is organized as follows. In section “System description,” the dynamic model of PEA system with nonlinear hysteresis is given and then the design process of FNTSMC based on TDE is presented in detail in section “Controller design.” Later, the stability of the proposed controller is proved in section “Stability analysis,” and the effectiveness and robustness of the proposed controller are verified by comparative experiments in section “Experimental verification.” Finally, section “Conclusion” concludes this paper.
System description
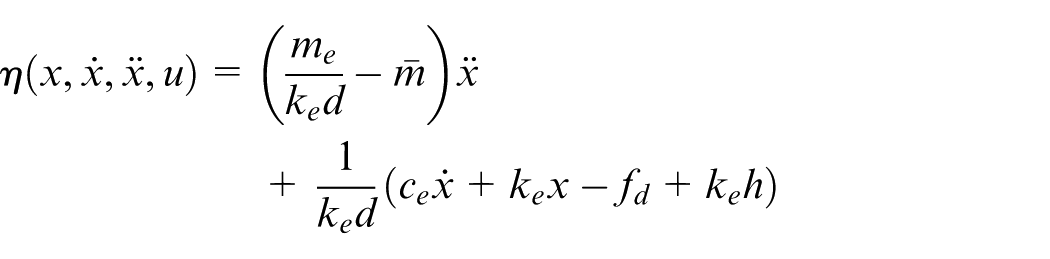
The structure principle of a typical stacked PEA is shown in Figure 1(a). Its dynamic model can generally be equivalently simplified as the mass-spring-damping system 4 shown in Figure 1(b). Therefore, the dynamic model of the PEA system with nonlinear hysteresis can be expressed as 18


where
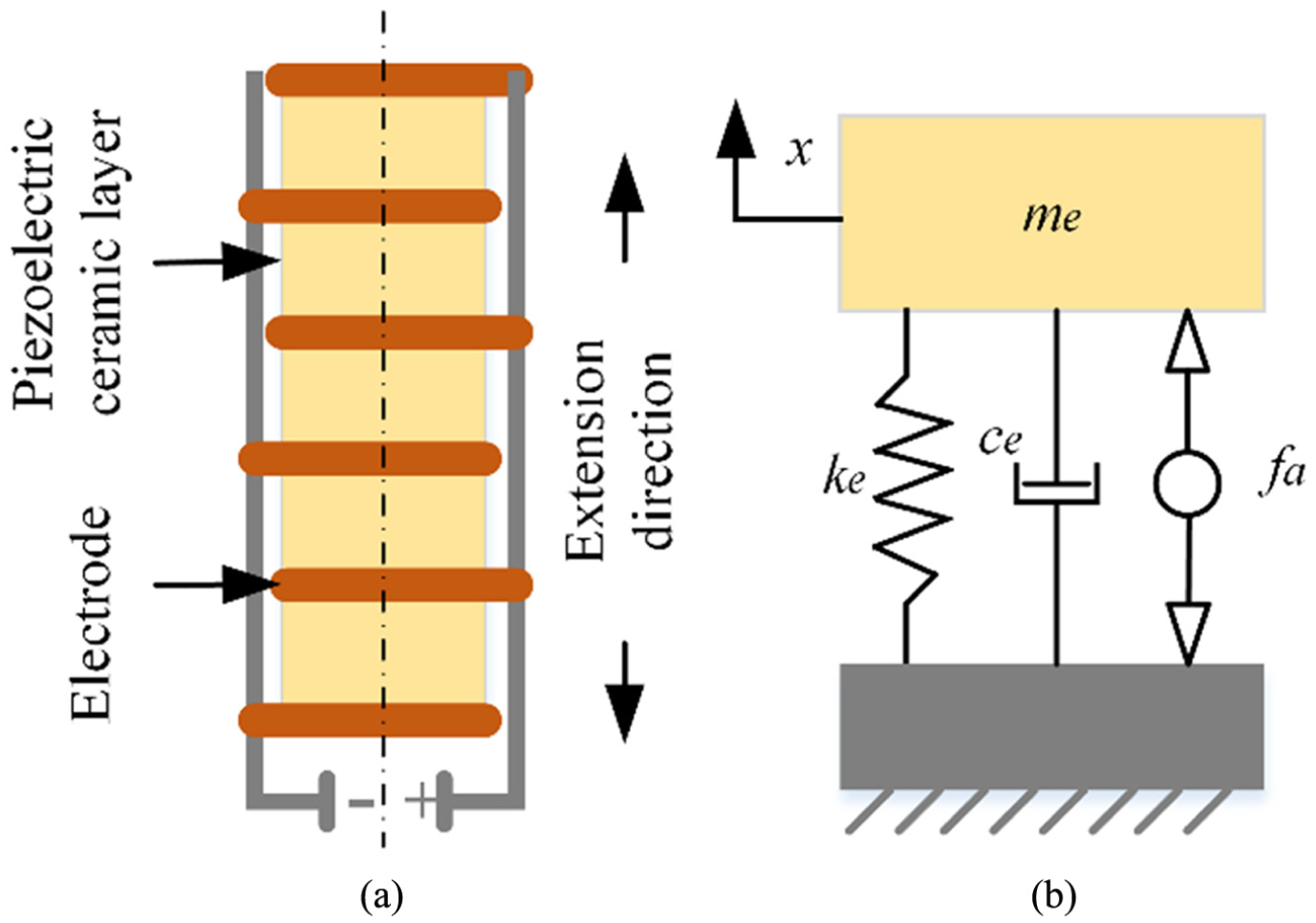
(a) Structure principle of the PEA and (b) equivalent dynamic model.
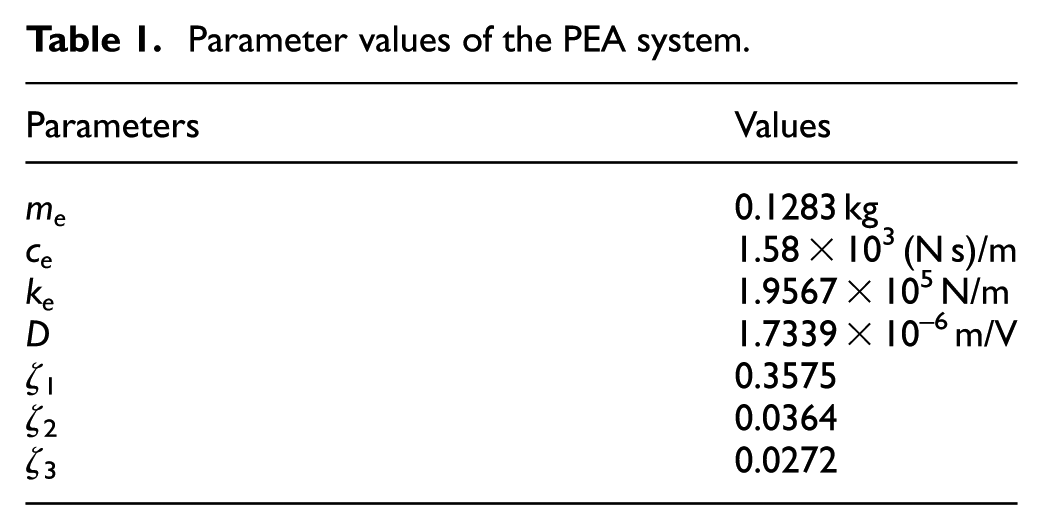
According to the mathematical model of the hysteresis described by equation (2), if we chose the parameter values given in Table 1, the hysteresis effect curve is obtained in Figure 2. It can be seen that the PEA system exhibits strong nonlinearity in open-loop case, which seriously deteriorates the positioning performance of the system. Moreover, the hysteresis parameters of the PEA system are often uncertain in practice. Although the parameters can be identified, the process is still very complicated, and the precision of the identified model cannot be guaranteed. In order to eliminate this nonlinear hysteresis, a nonlinear robust control method without model is used to improve the precision motion control performance of the PEA system.
Parameter values of the PEA system.
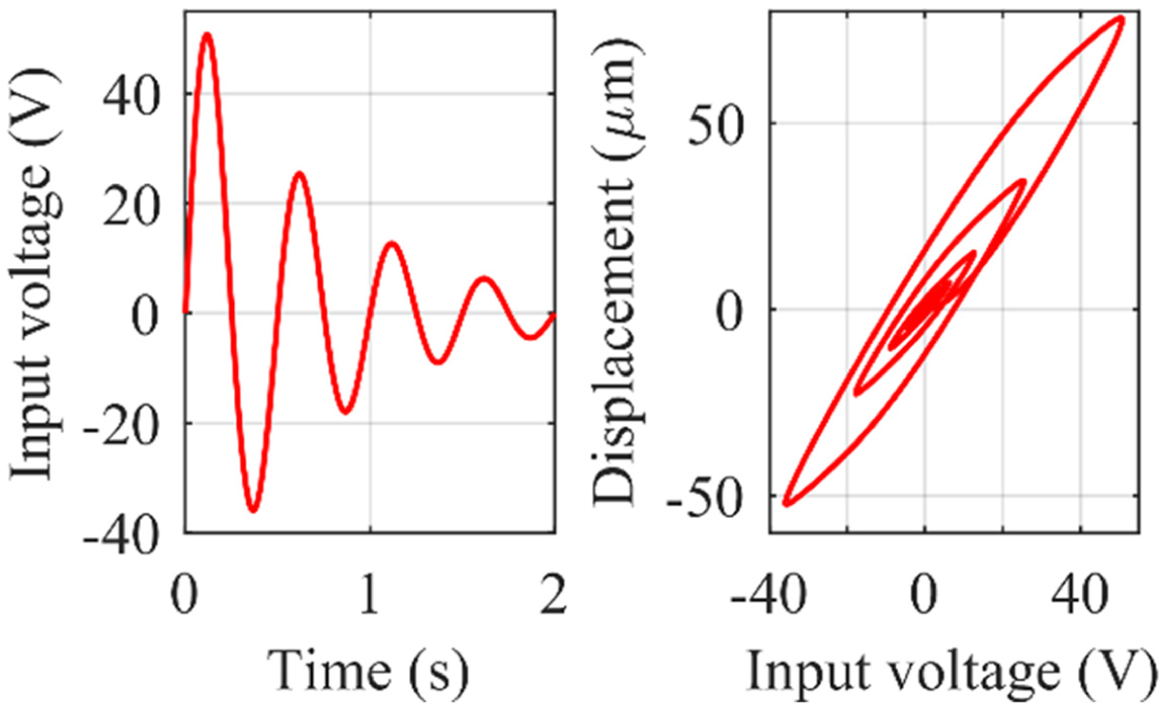
Hysteresis effect between the input voltage and output displacement of the PEA system.
Controller design
The control objective of this paper is to design a nonlinear robust controller, which can accurately track the desired displacement even if there exist nonlinear hysteresis and external disturbance in the system. For this reason, the following displacement tracking error is defined as

where
Because the control input of the PEA is voltage, in order to realize displacement tracking, the dynamic model (1) of the PEA is simplified as follows

where
For convenience of expression, thereinafter,
To ensure fast and accurate position tracking of the PEA system, an NTSM surface is defined as 12

where

In order to eliminate control chattering and achieve fast finite-time convergence, the following fast-TSM-type reaching law is chosen 12

where
Differentiating equation (5) with respect to time and substituting it into equation (7), we have

Due to


where

where the subscript

Therefore, combining equations (9)–(12), the proposed FNTSM controller based on TDE is designed as
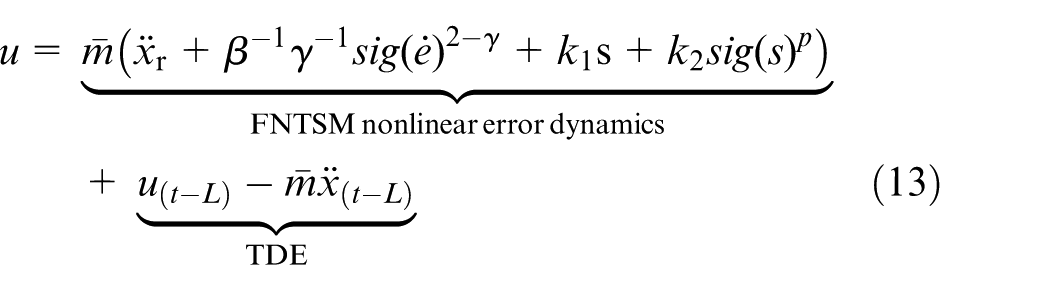
It can be seen from the above equation that because the sliding surface is a continuously differentiable NTSM, and the reaching law is a fast TSM, the proposed control strategy ensures a fast finite-time convergence and no chattering. In addition, the TDE simplifies the controller and effectively suppresses the hysteresis and other nonlinear behaviors of the PEA system, so the controller can achieve model-free control. The controller structure of the PEA system is shown in Figure 3.
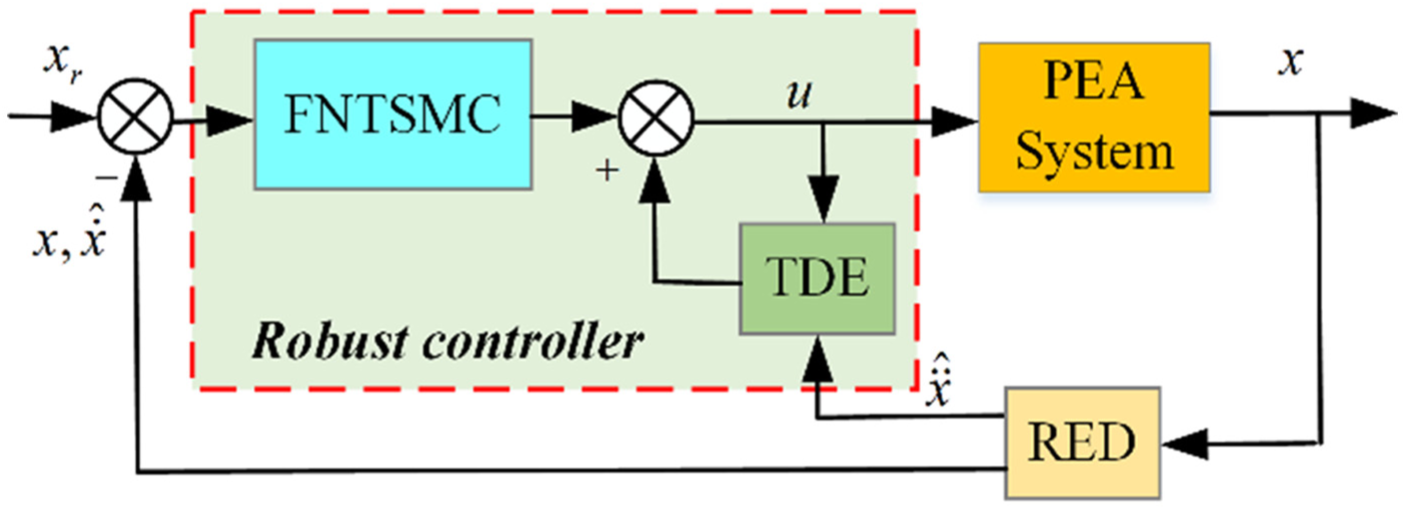
Control block diagram of the PEA system.
Remark 1
It is worth noting that the proposed controller (13) can be transformed into the TDC with linear error dynamics if we let

which can be equivalent to the control input of the traditional TDC 13

where
Remark 2
Whether for the traditional TDC controller (15) or the proposed controller (13), both their control law require high-order derivatives of the displacement signal. However, due to the fact that only the displacement signal is measurable, it is necessary to estimate the velocity and acceleration signals by a state estimator. In this paper, a robust exact differentiator (RED) 19 is used to estimate the states of the system in real time. The expression of the second-order RED is designed as follows
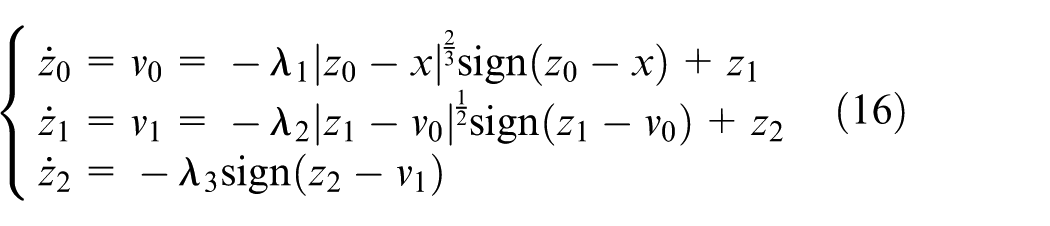
where

its velocity and acceleration information can be estimated by using RED as depicted in Figure 4. It can be seen from the figure that the RED can converge in a finite time, which meets the requirements in practice.
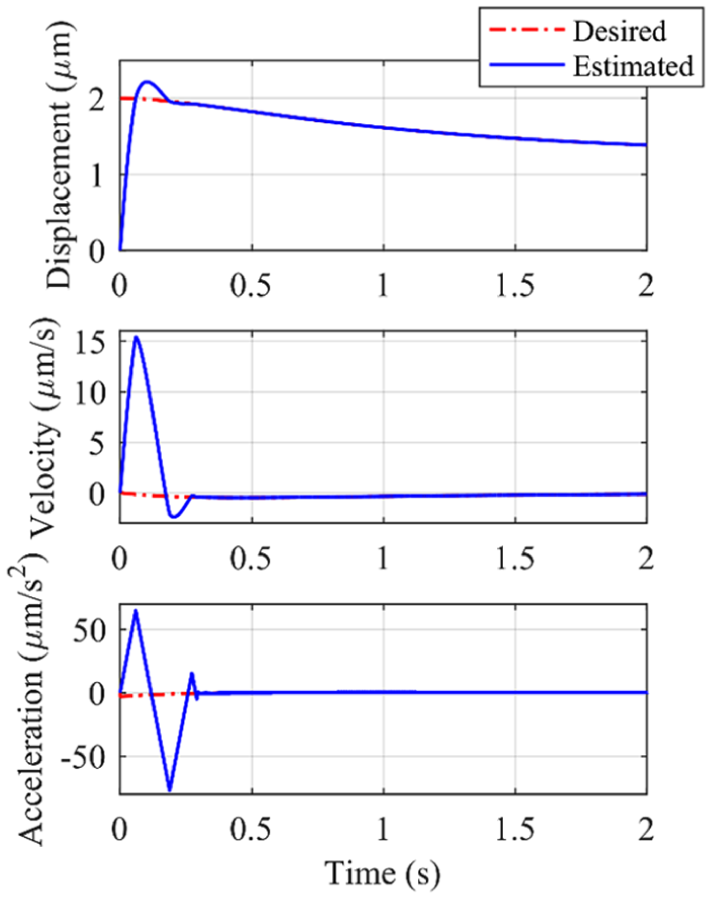
The estimated displacement, velocity, and acceleration using the RED.
Remark 3
Since the TDE estimates the unknown nonlinearity at the current time by using the delay information from the previous moment, the sampling period L should be small enough to ensure the accuracy of the TDE. In addition, there always inevitably exists noise in the sensed signal in the experiments. By selecting a smaller value of the control parameter
Stability analysis
To analyze the closed-loop stability of the proposed controller, substituting the control law (9) into the PEA dynamic model (4) yields

Since the right side of the above equation represents the residual error term of the TDE, the TDE error is defined as
Lemma 1
If a Lyapunov function

where

Theorem 1
For a class of PEA systems described in equation (1), if the NTSM-type sliding-mode surface (5) and the reaching law (7) are selected, under the action of the control law (13), the tracking error


where
Proof
Considering the following Lyapunov function

Differentiating it with respect to time yields

Differentiating equation (5) with respect to time, and substituting it into the above equation yields

Substituting equation (10) into (17), we have

Combine the above equation with (24) and reorganize it into the following two forms


For the case of equation (26), if

where
Similarly, for equation (27), if

where
Synthesizing the results of equations (28) and (29), the sliding surface can converge to the following region in a finite time

where
In order to prove the convergence of the tracking error and its velocity, the sliding surface (5) is rewritten to the form of equation (31) and discussed as follows

1. For the case of

2. By rewriting the equation (31) to

The proof is thus completed.
Experimental verification
In order to verify the effectiveness of the proposed controller, the proposed control method is compared with the traditional TDC controller. Considering that the proportional–integral–differential (PID) controller is a mature control method used in industry at present, the proposed controller is also used to illustrate the easy implementation and superiority compared with the PID controller.
The comparative experiments are carried out under the MATLAB/Simulink/xPC target environment, and the experimental device is shown in Figure 5. The sampling frequency is set as 10 kHz. By weighing the magnitude of control input chattering and tracking error, the controller parameters are adjusted from small to large by trial and error method, and the final selected parameters are shown in Table 2, in which the same control parameters are chosen consistently for a fair comparison. In addition, in order to evaluate the performance of each controller, the root-mean-square error (RMSE) and maximum error (ME) are selected as evaluation criteria. The definitions are respectively as follows

where N is the sampling points,
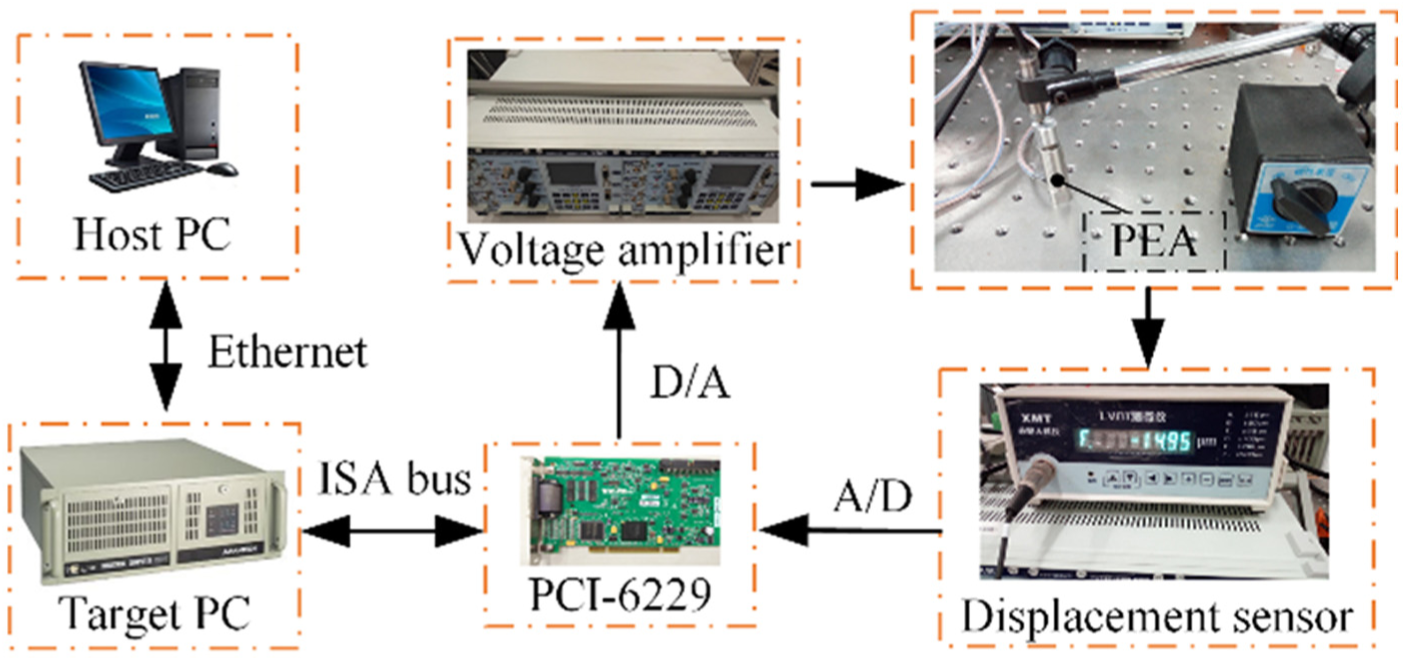
Experimental setup of the proposed controller.
Controller parameter design.
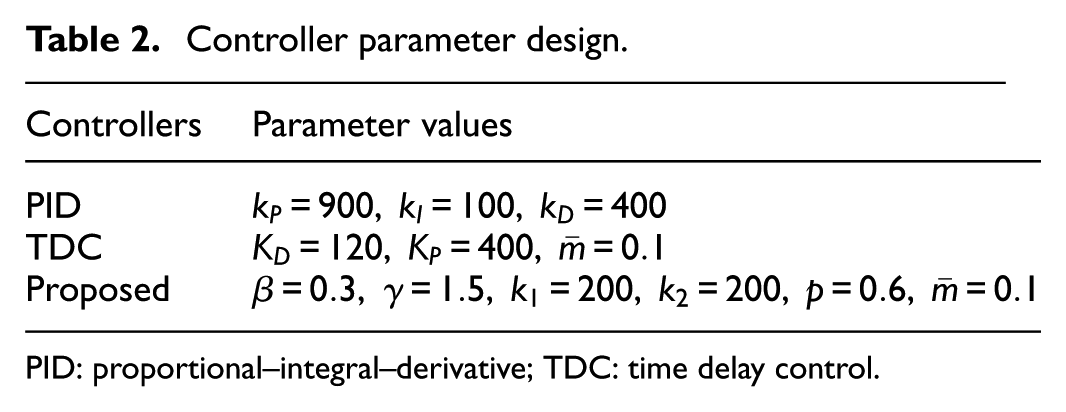
PID: proportional–integral–derivative; TDC: time delay control.
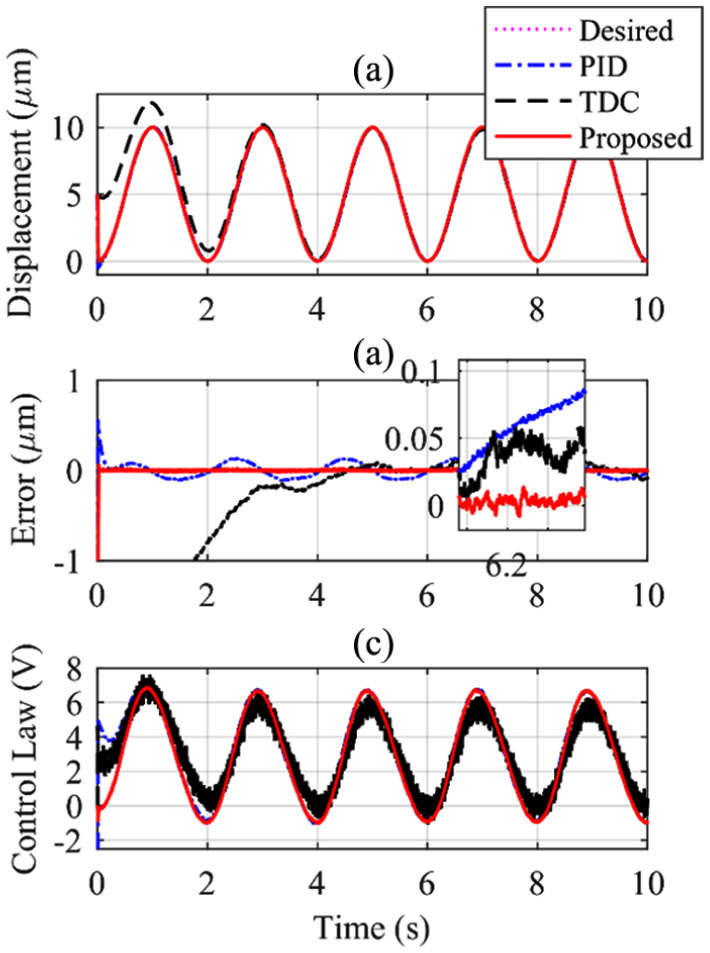
Sinusoidal signal-tracking performance
First, the PEA system is commanded to follow the sinusoidal reference signal of

and the tracking results of each controller are shown in Figure 6 and Table 3, respectively. It is easy to see from the experimental results that although all the three controllers track the reference signal accurately, the tracking error boundary of the proposed controller is smaller than that of the other two controllers, and its ME is
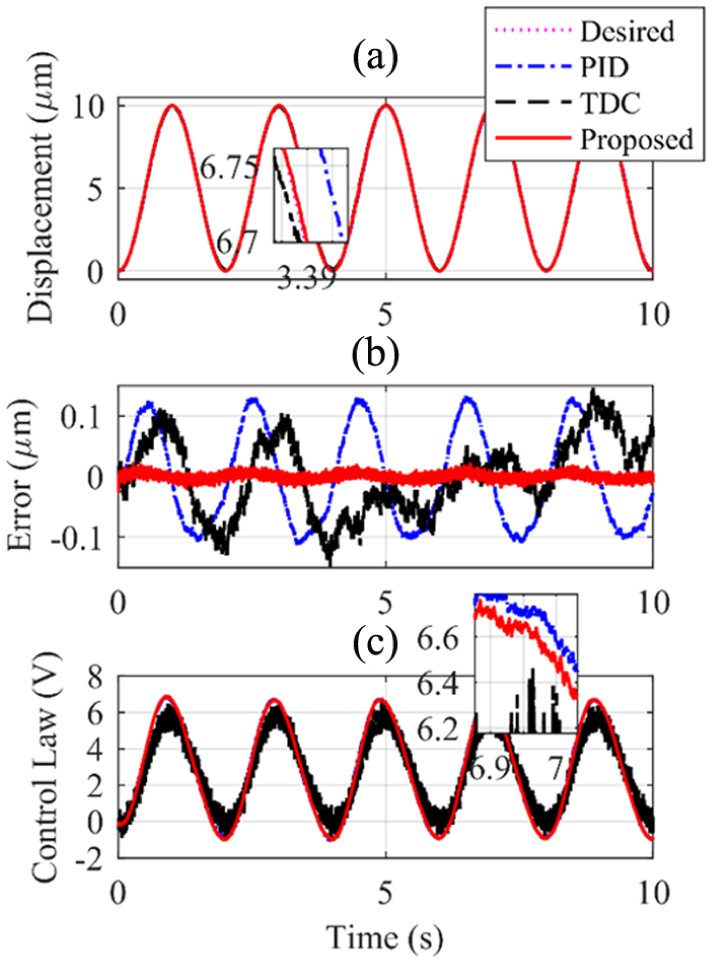
The time response of tracking the sinusoidal signal.
Comparison of trajectory tracking errors.
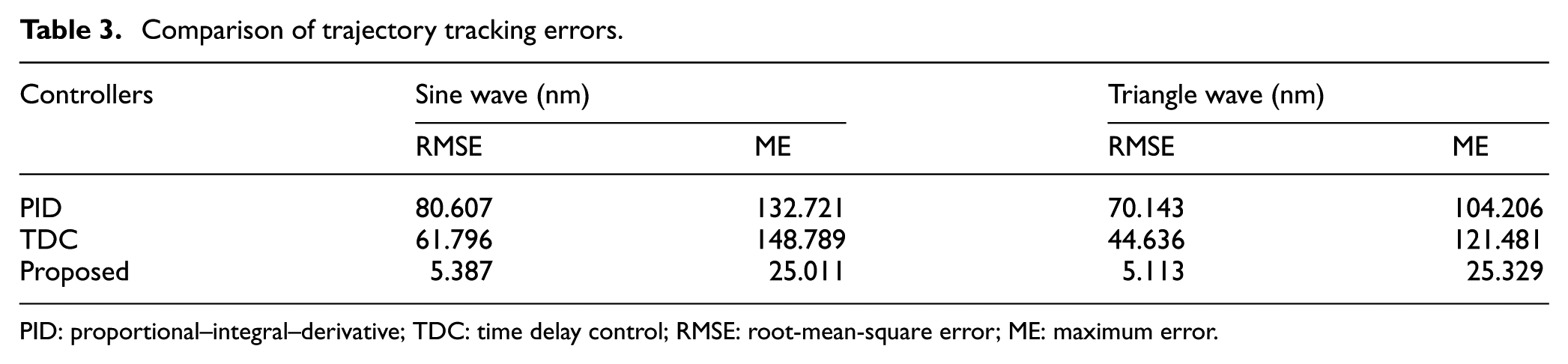
PID: proportional–integral–derivative; TDC: time delay control; RMSE: root-mean-square error; ME: maximum error.
Triangular signal tracking performance
In the application of scanning probe microscope, triangular trajectory is often used as tracking signal.
20
Since most controllers, including the proposed controller, are to consider the continuous and differentiable trajectories in the design process, the design of tracking control system has a great challenge for the continuous but non-differentiable triangular trajectories. Therefore, in order to further verify the tracking performance of the proposed controller, the triangular trajectory with a frequency of 0.5 Hz and an amplitude of
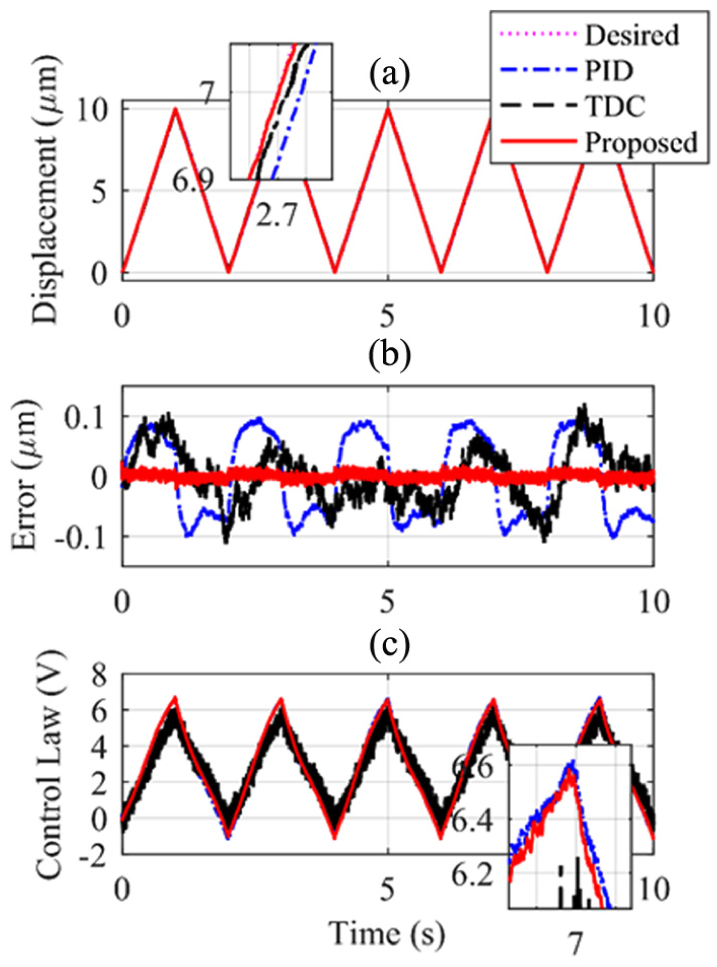
The time response of tracking the triangular signal.
Anti-disturbance performance
Finally, in order to test the fast convergence performance and robustness against the external disturbance of the proposed controller, a 5 kg additional load shown in Figure 8(b) as well as a shock disturbance with initial displacement of
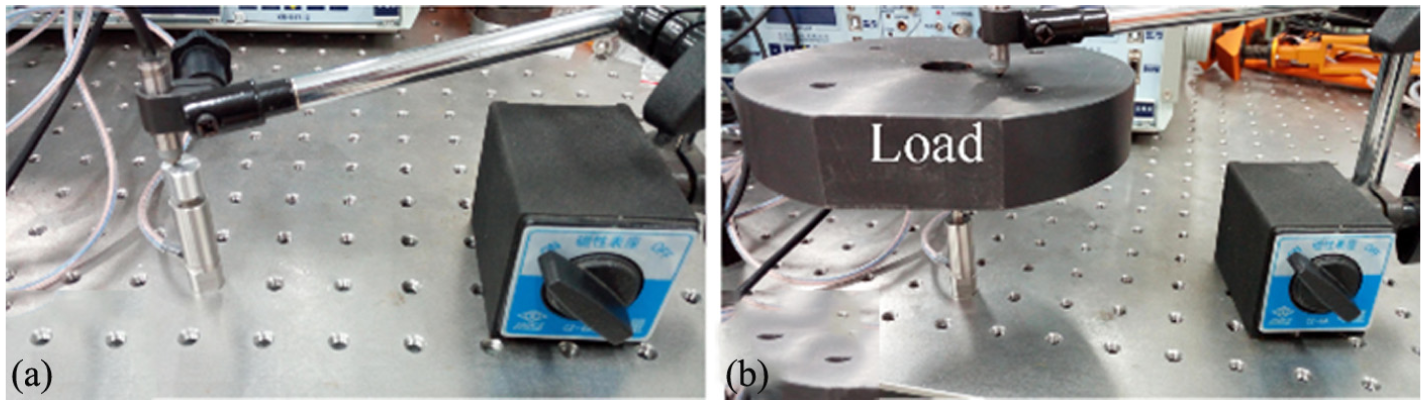
The PEA system: (a) without load and (b) with load.
The time response of the controllers under external disturbances.
Through the above three kinds of control performance tests, it can be seen that the proposed controller can track well both continuous and discontinuous trajectories and has stronger anti-disturbance performance and faster response speed. Therefore, the proposed controller can meet the simple, stable, and high-accuracy performance requirements in practical engineering applications.
Conclusion
In this paper, a nonlinear robust controller based on TDE and FNTSM is proposed for PEA systems with nonlinear and time-varying uncertainties. The proposed controller not only ensures the fast convergence of tracking error in finite time but also does not need the system model. In addition, the stability of the system is analyzed by using the Lyapunov function, and the convergence region of the error in finite time is also given. In the experimental study, by comparing the PID and TDC controllers, the proposed controller achieves the best tracking performance with nanoscale tracking accuracy and has the stronger anti-disturbance performance and the faster response speed, regardless of the continuous trajectory or the discontinuous trajectory. Therefore, the proposed control strategy can be widely used as an effective control method for high-precision motion control of PEAs.
Footnotes
Acknowledgements
The authors are grateful to the anonymous reviewers who improved the quality of the investigation.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Zhejiang Science and Technology Plan Project (grant no. 2017C31117), and the Wenzhou Science and Technology Plan Project (grant no. G20160004).