
Abstract
It is critical to measure the roll angle of a spinning missile quickly and accurately. Magnetometers are commonly used to implement these measurements. At present, the estimation of roll angle parameters is usually performed with the unscented Kalman filter algorithm. In this paper, the two-step adaptive augmented unscented Kalman filter algorithm is proposed to calibrate the biaxial magnetometer and circuit measurements quickly, which allows accurate estimates of the missile roll angle. Unlike the existing algorithms, the state vector of the algorithm is based on the missile roll angle parameters and the error factors caused by the magnetometer and the measurement circuit errors. Next, a two-step fast fitting algorithm is used to fit the initial value. After satisfying the stop rule, the state vector of the filter is configured to estimate the roll angle parameters and the calibration parameters. This method is evaluated by running numerous simulations. In the experiment, the algorithm completes the calibration of the magnetometer and the measurement circuit 1 s after the missile launches, with a sampling rate of 1 ms and an output roll attitude angle with a 0.0015 rad precision. The conventional unscented Kalman filter algorithm requires more time to achieve such a high accuracy. The simulation results demonstrate that the proposed two-step augmented unscented Kalman filter outperforms the conventional unscented Kalman filter in its estimation accuracy and convergence characteristics.
I. Introduction
To achieve an accurate approach of a target after launch, the flight path of a rotating missile can be changed by applying force (e.g. caused by gas jets or steering gear, etc.) to the missile body. However, both gas jets and the deflection of the steering gear must be applied at the right moment. Otherwise, a spinning missile will not be able to make the correct adjustment. Thus, the onboard computer is required to calculate the missile’s angular displacement and angular velocity in a very short time. 1
The magnetometer is widely used because of its low cost, high reliability, and other characteristics. However, these sensors are not error free because of their biases, scaling errors, and non-orthogonality, which limit the accuracy of the roll angle measurements. 2 Therefore, the magnetometer must be calibrated before correctly measuring the missile roll angle. Moreover, in order to allow the missile to adjust its altitude immediately after launch, the calibration process must be completed as quickly as possible.
The calibration can be realized using different mathematical approaches to estimate the parameters both offline and online. 3 At present, researchers have proposed various approaches to reducing the measurement errors of the magnetometers. Dong et al. 4 proposed the reason for affecting the accuracy of the magnetometer measurement. Soken 5 proposed an estimation algorithm based on a reconfigurable unscented Kalman filter (UKF). This algorithm reduces the computational cost, but does not speed up the solution. Da Forno et al. 6 used both the extended Kalman filter (EKF) and UKF algorithms for the online estimation of magnetometers. This work considers that the UKF has certain advantages over the EKF. Zhang et al. 7 presented a perfect offline estimation algorithm. In the study of Hu and Pang, 8 a genetic algorithm is proposed to calibrate the magnetometer error, and wavelets are proposed for noise cancellation. These two algorithms are considered to be effective for the calibration of the magnetometer. Pang et al. 9 used a non-magnetic rotating platform and proton magnetometers to calibrate the magnetometers based on a differential algorithm. GH Elkaim and CC Foster proposed the use of an ellipse and ellipsoid fitting algorithm to calibrate the magnetometer. That algorithm uses the least square fitting result as the final result, but the precision can be improved further. 10
This paper aims to introduce a novel adaptation strategy for an UKF algorithm that is used for the rapid estimation of the roll angle of the spinning missile. The initial values of the filter are known to affect the convergence speeds and accuracies of the filters. However, due to the uncertainty of the information to be measured, the value of the initial value cannot be accurately obtained with the traditional UKF. To solve the above problems, this paper presents the augmented unscented Kalman filter (AAUKF). This algorithm solves some of the problems in previous papers. First, the process of calibrating magnetometers offline is too complex to be implemented in large quantities. Second, using the UKF algorithm for online calibration, the convergence of the results is slow. Third, fitting the data using an ellipsoid or ellipse, the accuracy of the results is limited by the amount of data. Compared with the algorithm proposed in the previous paper,5–7 the fast convergence of the fitting algorithm and the real-time solution of the UKF algorithm are combined. Without affecting the accuracy of the solution, the solution speed has been greatly improved. It should be noted that in the numerical simulation experiments in this paper, the consideration of noise is only considered as Gaussian white noise. For this system, the noise disturbance includes
II. Angle Measurement Model Based on Magnetometer
When using the biaxial magnetometer to measure the roll angle of a rolling missile, a circuit system equipped with a magnetometer is installed on the cross section of the missile. 16 Through the conversion of the relationships among the angles, we can obtain the roll attitude angle of the missile.
Figure 1
indicates the angle measurement model based on the magnetometer. The red block represents the circuit equipped with a biaxial magnetometer.
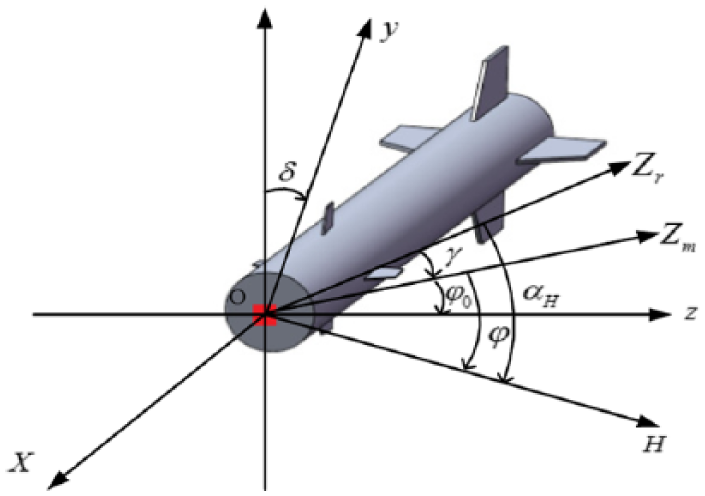
Angle measurement model based on the magnetometer.
The measurement values of the magnetometer channels


where
Defining

Finally, the missile attitude angle

The estimation of the parameters via the filtering method is a substantial process of transforming the parameter estimation problem into state estimations, which can be achieved by customizing unknown parameters to be additional state variables, thus increasing the variables of the system state vector. 19 Specifically, such a method can be effectively applied to nonlinear problems instead of linearizing the model. This nonlinearity manifests itself in the state products. 20
The system equation can be represented in its discrete forms, which is shown in formula (5), as can the measurement equation, which is shown in formula (6)


where



where
The parameter vector estimated during the filtering process is

The parameters
To accurately describe the rolling motion of the missile, and considering the small changes in the acceleration of the missile flight, the missile rolling motion is approximately expressed as an accelerating motion with a slow acceleration

In formula (11),
III. Two-Step Adaptive Adjustment of the Initial Value of the Filter
Within a missile attitude measurement algorithm, especially for short-range missiles, the missile’s attitude angle must be solved for within a short period of time after the launch. Otherwise, the missile will not be able to adjust its trajectory based on the target position and the current attitude. However, the initial data acquired by the magnetometer are mixed with considerable and unknown noise and outliers. 22 Directly using these initial data as the initial value of the filter will cause the filtering process to slow down the convergence rate or even be to not converge. 23 Therefore, a relatively accurate initial value of the state vector can effectively speed up the convergence rate of the filter. However, the initial value of the state vector is not determined due to the different sensors, different installation methods, and different missiles, which cause the state vector to have different real values. This difference requires a faster calculation method to obtain the closest possible value to the exact initial value of the state vector in a short time.
A. First step: adaptive processing of the calibration parameters of magnetometers
In the state vector
The trajectory equation measured by the Y and Z axes of the biaxial magnetometer is
where
Considering the calculation quantities and speeds, the value of the non-orthogonal error angle is generally not more than 0.025% of the full angle. This value will not affect the overall convergence rate of the UKF, as opposed to the other estimated parameters. Thus, we assume
The simplified formula (12) is as follows

Formula (13) is the final trajectory equation of the magnetic vector signal. Thus, the trajectory of the magnetic vector is an ellipse.
The standard binomial of an ellipse is

Comparing formulas (13) and (14), the following relation holds
The least squares method is adopted to solve for the ellipse parameters
Let the residual formula be

If there is

The elliptical parameters
In the first step, the adaptive process of the parameters can speed up the convergence rate of the UKF, but this process also takes time. Moreover, with regard to the fitting that is taking place, the improvement of the fitting accuracy will not be proportional to the consumption of the fitting time. Therefore, the correct judgement condition is needed to terminate this step.
In the time period of

The covariance of the fitting parameters is

When
B. Second step: adaptive process of the parameters of rolling motion
In the first step, the calibration parameters of the magnetometer and the measuring circuit are obtained.
25
According to these parameters and the measurement sequence

From equation (12), we can see that the missile roll angle approximation is

Then, the approximation is fit using the least square method. First, define the residuals

Then, there is an optimal value of

The roll angle
In the period of time

The covariance of the fitting parameters is

When
After the two-step adaptive adjustment of the state parameter, the optimal initial value
IV. Augmented Unscented Kalman Filtering for Additive Process Noise
Both the UKF and standard Kalman filter belong to the linear minimum variance estimation method that is based on the model.
26
The difference between them is the method of obtaining the optimal gain matrix. The UKF determines the optimal gain matrix based on the estimated and measured covariance matrices.
27
Then, the covariance matrix is calculated from the doubled
The system state is extended by augmenting the dimension of the state vector in the UKF model. Because of the driving influence of noise on the system motion model mentioned above, the driving noise is considered in the system state. Therefore, the augmented state vector and covariance matrix can be depicted in formulas (26) and (27)


where the superscript ax denotes the augmented state vector, the dimension of
The state vector and the covariance matrix of the filter are initialized as follows


where
The initial estimation of the extended state vectors is as follows

The initial estimation of the extended covariance matrix is as follows

The unscented transformation is a type of efficient method for the estimation of the mean and covariance of a random variable during a nonlinear transformation.
29
The
For the



The weights W are calculated as follows

where the subscripts 0 and i are the corresponding estimated states, and the superscripts m and c represent the weights of the mean and covariance, respectively. Here,
The time propagation equation is as follows


The state estimation equation is as follows


The measurement estimation equation is as follows


The cross-covariance matrix is as follows

Calculate the gain of the UKF

Finally, the updated states and covariance matrix are determined as follows


where
V. Experimental Verification
A. Simulation of the algorithm
The simulation is used to model the rolling motion of a spinning missile, the measurement of the magnetometer, and the measuring circuit because the actual missile roll angle and the magnetometer and the measurement circuit error parameters cannot be accurately known. In the simulation process, all of the magnetometer and the measurement circuit error values are manually predefined. Only in this way can the final processing result be compared with the correct result to evaluate the merits of the algorithm. 31
According to the actual case of a spinning missile moving from its launch to a stable flight, the rolling angular displacement, velocity, and acceleration of the missile as well as the change in the component amplitude of the geomagnetic field vector on the sensitive axis are simulated. In this simulation, we set the Y-axis baseline as
In Figure 2(a)–(d) denotes the estimation of the magnetometer calibration parameters using the AAUKF algorithm and the UKF algorithm. The comparison indicates that when the AAUKF algorithm is used, the magnetometer amplitude, scaling factor, Y-axis, and Z-axis baselines can be obtained in 0.12, 0.13, 0.16, and 0.12 s, respectively. Their estimated accuracy reached 0.2% Full Scale (FS), 0.3%, 0.2% FS, and 0.4% FS, respectively. However, to obtain the same precision results using the UKF algorithm, then the amount of time required is 40, 30, 55, and 48 s, respectively. In both algorithms, the baseline estimation time for the Y-axis is the longest—0.16 and 55 s for the AAUKF and UKF, respectively. This finding shows that the calculation speed of the AAUKF algorithm is almost 300 times faster than that of the UKF algorithm on the magnetometer calibration parameters.
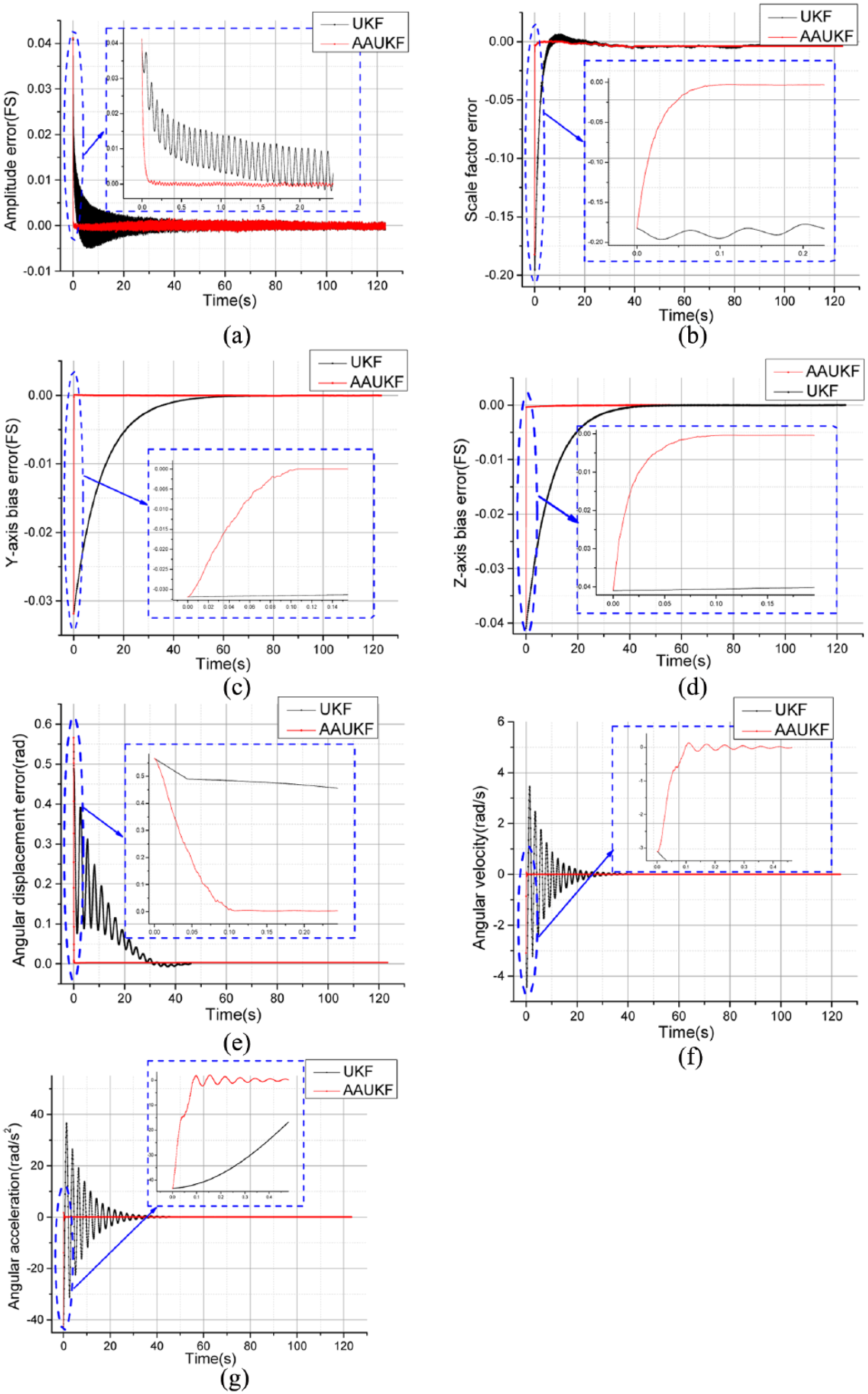
Error of the parameter estimation. (a) Error of the amplitude estimation; (b) error of the scale factor estimation; (c) error of the Y-axis baseline estimation; (d) error of the Z-axis baseline estimation; (e) error of the missile roll angular displacement estimation; (f) error of the missile roll angular velocity estimation; (g) error of the missile roll angular acceleration estimation.
In Figure 2(e)–(g) , respectively, show that the angular displacement, roll angular velocity, and roll angular acceleration of the spinning missile can be obtained at 0.13, 0.4, and 0.45 s using the AAUKF algorithm. Their estimation accuracy is 0.005 rad, 0.1 rad/s, and 1.5 rad/s2, respectively. However, if we use the UKF algorithm and want to obtain the same accuracy, the results will take approximately 41, 38, and 40 s. Again, this time is approximately 100 times longer than that when the AAUKF algorithm is used. This result means that in estimating the roll angle information of the missile, the AAUKF algorithm can correct the magnetometer and the measurement circuit in less time than the UKF algorithm to obtain accurate roll angle parameters, which allows the missile state to be controlled as soon as possible, and thus allows accurate focus on the target.
B. Semi-physical simulation experiments
To verify the validity of the algorithm on the magnetometer, the magnetic shielding device of the Helmholtz coils and simulative alternating magnetic field generator are used for the simulation experiments. As shown in Figure 3 , the measurement components of the magnetometer are placed in the simulative alternating magnetic field of the Helmholtz coils. 32 Instead of magnetometer rotation, we set the signal generator to output the Alternating Current to generate a customized rotating magnetic field.
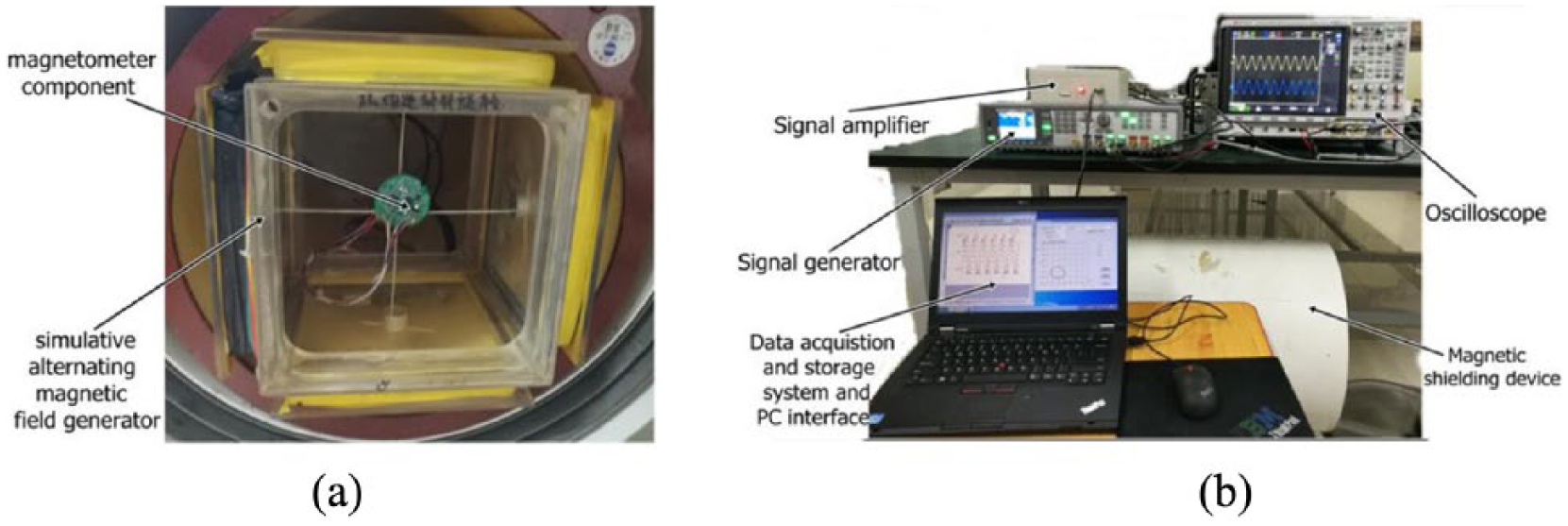
Experimental platform of the simulative alternating magnetic field: (a) the simulative alternating magnetic field generator and (b) the experimental system.
In this experiment, we used the same magnetometer, signal processing circuit, and onboard computer. However, there are two types of calculation programs, the AAUKF algorithm and UKF algorithm, in the onboard computer.
The biaxial magnetometer obtains the magnetic field components of the Y and Z sensitive axes according to the changes in the magnetic field, and it corrects the magnetometer and the measuring circuit through the AAUKF algorithm and the UKF algorithm in the onboard computer, it thus achieves the missile’s roll angular displacement, roll angular velocity and roll angular acceleration measurements. The obtained parameters are compared with the angular displacement, angular velocity, and angular acceleration of the rotating magnetic field to obtain the estimation error of the filtering algorithm.
Figure 4(a)–(c) shows that the fitting process of the initial values of the angular displacement, angular velocity, and angular acceleration is completed in approximately 0.1 s when using the AAUKF algorithm. In 0.3–0.4 s, the estimation of the roll motion parameters is completed. A comparison is made with the AAUKF algorithm. The convergence of the estimation process of the roll motion parameters is very slow when using the UKF algorithm, which is approximately 100 times the amount of time for using the AAUKF algorithm.
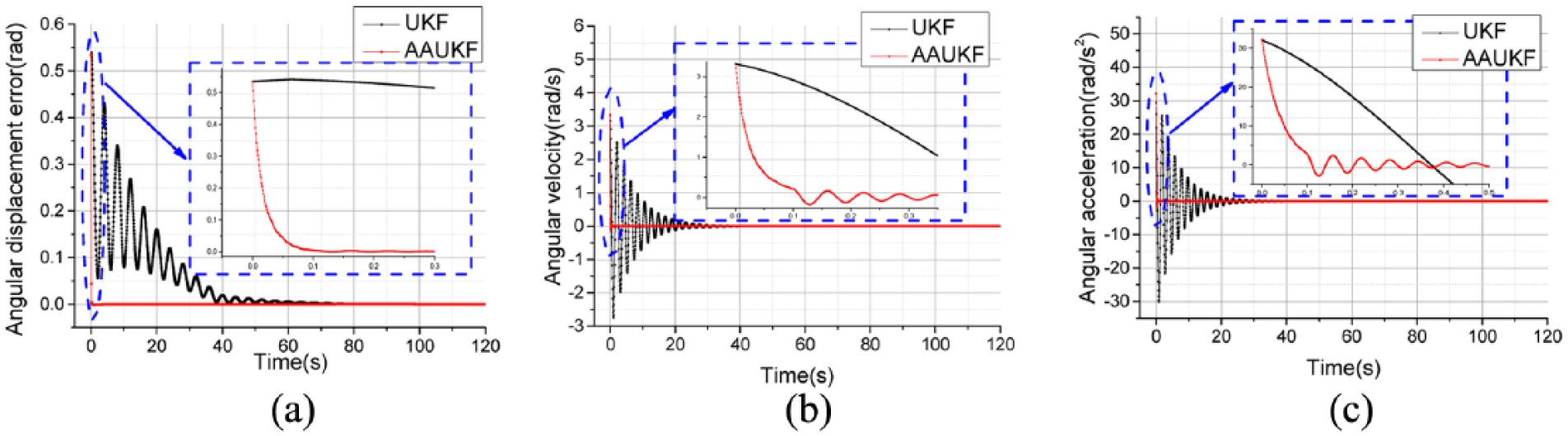
Error of the parameter estimation: (a) error of the roll angular displacement estimation, (b) error of the roll angular velocity estimation, and (c) error of the roll angular acceleration estimation.
The result of this measurement is similar to that of the numerical simulation. The slightly different convergence time is due to the different true values of the calibration parameters of the magnetometer and the signal processing circuit. Measurement results show that the AAUKF algorithm has better results in solving similar problems. During the measurement, the true value of the calibration parameters of the magnetometer is unknown, so the algorithm cannot be evaluated by the error of the filtering result. However, in the simulation process, the calibration parameters of the magnetometer are artificially set and have a certain true values. The effectiveness of the algorithm can be confirmed by the filtering error of the calibration parameters.
VI. Conclusion
In this study, a two-step AAUKF algorithm is proposed to quickly calibrate the magnetometer and estimate the roll angle of a missile. The algorithm consists of three steps. The first step uses an elliptical equation to fit the correction parameters of the magnetometer and the measuring circuit. When the correction parameters satisfy the stop rule, the second step begins. Using the calculation results and the measurement of the magnetometer in the first step, the roll angle displacement, angular velocity, and angular acceleration of the missile are fitted. Similarly, after satisfying the fitting stop rule, the third step begins. Eight state parameters of the missile roll angle that are measured using a magnetometer are estimated by the Kalman algorithm. In contrast to the existing algorithms, the proposed algorithm can estimate the characteristic parameters of the magnetometer and the measurement circuit; at the same time, this new algorithm can monitor the validity of the missile roll angle parameter to ensure the correct convergence of the estimated parameters. The algorithm performs a fast processing of the initial value of the filter to ensure that the missile can obtain its roll attitude in a short period after its launch to enable the missile to be controlled quickly and effectively. Simulation and experimental results show that when using a dual-axis magnetometer to measure the missile roll angle, the algorithm can complete the corrections of the magnetometer and measurement circuit in approximately 1 s and provide the angle of the roll attitude with an accuracy of not less than 0.0015 rad and that of the angular velocity of the roll with an accuracy of no less than 0.1 rad/s. In addition, the proposed scheme and algorithm are equally applicable to rapid and accurate measurements of other carrier roll angles.
Footnotes
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.