
Abstract
Objectives
This study aimed to investigate drivers’ disengagement from nondriving related tasks (NDRT) during scheduled takeovers and to evaluate its impact on takeover performance.
Background
During scheduled takeovers, drivers typically have sufficient time to prepare. However, inadequate disengagement from NDRTs can introduce safety risks.
Method
Participants experienced scheduled takeovers using a driving simulator, undergoing two conditions, with and without an NDRT. We assessed their takeover performance and monitored their NDRT disengagement from visual, cognitive, and physical perspectives.
Results
The study examined three NDRT disengagement timings (DTs): DT1 (disengaged before the takeover request), DT2 (disengaged after the request but before taking over), and DT3 (not disengaged). The impact of NDRT on takeover performance varied depending on DTs. Specifically, DT1 demonstrated no adverse effects; DT2 impaired takeover time, while DT3 impaired both takeover time and quality. Additionally, participants who displayed DT1 exhibited longer eye-off-NDRT duration and a higher eye-off-NDRT count during the prewarning stage compared to those with DT2 and DT3.
Conclusion
Drivers can benefit from earlier disengagement from NDRTs, demonstrating resilience to the adverse effects of NDRTs on takeover performance. The disengagement of cognition is often delayed compared to that of eyes and hands, potentially leading to DT3. Moreover, visual disengagement from NDRTs during the prewarning stage could distinguish DT1 from the other two.
Application
Our study emphasizes considering NDRT disengagement in designing systems for scheduled takeovers. Measures should be taken to promote early disengagement, facilitate cognitive disengagement, and employ visual disengagement during the prewarning period as predictive indicators of DTs.
Keywords
Introduction
Automated vehicles are categorized into six levels, spanning from Level 0 to Level 5. Level 3 (L3) and Level 4 (L4) Automated Driving Systems (ADSs) can execute driving tasks within their Operational Designed Domain (ODD) (SAE International, 2021), allowing drivers to engage in non-driving related tasks (NDRT), such as playing video games and watching films (Sun et al., 2021). However, when an ADS reaches its operational limit, it will prompt human drivers to resume control of the vehicle, known as takeovers.
Scheduled Takeovers and Takeover Requests
McCall’s taxonomy classifies takeovers into scheduled and nonscheduled takeovers, depending on whether the driver is forewarned about the takeover event (McCall et al., 2019). Nonscheduled takeovers occur in unexpected situations, such as road construction and obscured traffic signs (Körber et al., 2018). Conversely, scheduled takeovers are anticipated events, typically happening at predictable instances like freeway exits (Worle et al., 2020).
Scheduled takeovers can be prevalent because they occur in both L3 and L4 autonomous driving. According to SAE International, 2021, at L3, drivers are mandated to serve as a safety backup, whereas, at L4, it becomes optional as L4 ADSs can ensure minimal risk conditions within their defined ODD. However, in both L3 and L4, the ADS will notify drivers to take over when it approaches the exit of its ODD. Furthermore, advancements in information technologies enable ADSs to predict unexpected situations well in advance (Weaver & DeLucia, 2020), potentially reshaping current nonscheduled takeover scenarios into scheduled ones.
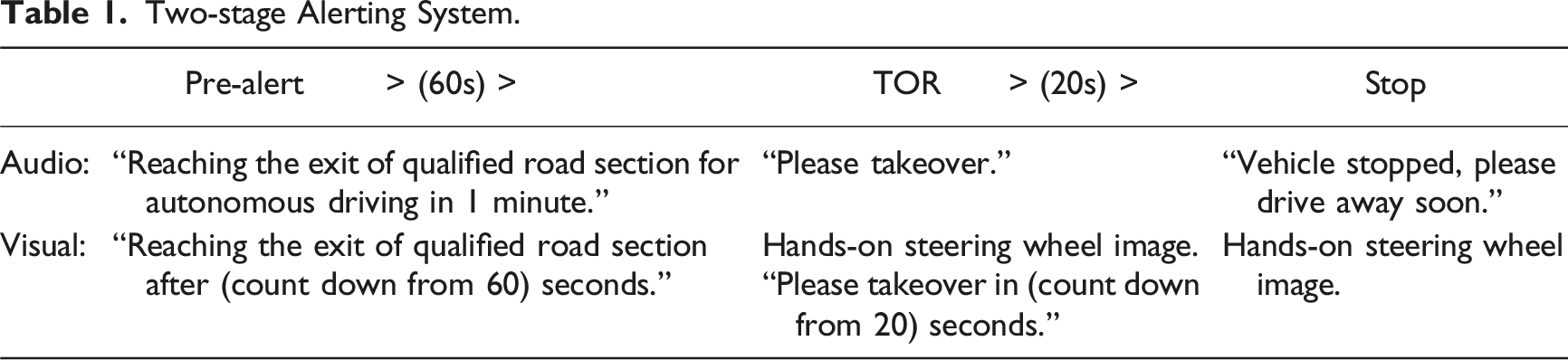
In comparison to nonscheduled takeovers, scheduled ones involve longer lead times for takeover requests (TORs). Studies that compared nonscheduled and scheduled takeovers set TOR lead times at 5–6 seconds for the nonscheduled scenarios and extended to 15–50 seconds for the scheduled situations (Pampel et al., 2019; Wu et al., 2019; Yun & Yang, 2020). In addition to the single-stage alerts, researchers have proposed a two-stage approach that incorporates an extended prewarning stage to enhance drivers’ readiness for taking over (Ma et al., 2020; van der Heiden et al., 2017). During the prewarning stage, drivers are provided with information about an upcoming takeover event but are not immediately required to take over.
Holländer and Pfleging (2018) implemented a two-stage alerting system in their scheduled takeover study where drivers received a pre-alert 1 minute before the TOR, and the TOR itself was issued 10 seconds before reaching the exit. Similarly, Hecht et al. (2022) used ambient colors to notify drivers about the impending takeover 150 seconds in advance, subsequently delivering TORs repeatedly at intervals of 28, 14, and 7 seconds before reaching the system’s limit.
NDRT Disengagement
Unlike dual-task situations in traditional manual driving, drivers can immerse themselves in NDRTs during L3 and above automated driving (Ko & Ji, 2018). However, when they need to take over, transitioning from NDRTs to driving represents a typical task-switching paradigm, in which subjects exhibit delayed responses and diminished performance, known as the switching cost (Monsell, 2003). However, with extended preparation time between tasks, the switching cost is notably reduced (Meiran et al., 2000).
Despite the extended preparation time in scheduled takeovers, drivers may not utilize it optimally. Studies indicate that drivers exhibit significantly delayed response in noncritical takeover scenarios, such as freeway exits (Eriksson & Stanton, 2017; Pampel et al., 2019). Wandtner et al. (2018) introduced a prewarning stage preceding the TOR and expected drivers to promptly disengage from NDRTs upon request due to the advanced notice. However, 65% of the participants continued with their NDRTs after receiving the TOR. Additionally, Hecht et al. (2022) detailed the disengagement timings (DTs) observed among participants during scheduled takeovers with two-stage alerts: 26.67% disengaged from NDRTs during the prewarning stage, 70.47% between the TOR and the moment of taking over, and 2.86% after taking over. These studies shed light on potential safety concerns associated with drivers’ disengagement from NDRTs during scheduled takeovers.
Wickens (2002) identified three distinct types of activities that utilize limited processing resources in the human brain: (1) perceptual activities involving the acquisition of specific information from various sensory channels; (2) cognitive activities encompassing higher-level thinking processes like contemplation, reflection, memory retention, and planning; and (3) responding activities involving the conscious selection and execution of responses, including verbal and physical reactions. Building on these three activity types, we propose an operational definition of NDRT disengagement:
NDRT Disengagement Entails the Cessation of Perceptual, Cognitive, and Responding Activities Related to NDRT Within a Defined Timeframe
Previous studies have reported drivers’ disengagement from NDRTs based on the observed eyes or hands diversion (Lin et al., 2019; Mok et al., 2017; Wandtner et al., 2018). However, explicitly ending a task does not necessarily indicate the termination of relevant cognitive activities (Logan, 1985), which has been overlooked in prior studies. Furthermore, NDRT disengagement in scheduled takeovers is not a transient response to TORs but rather a prolonged process starting from the prewarning phase. There is a lack of comprehensive study on NDRT disengagement that considers its associated cognitive activities, examines its impact on takeover performance, and investigates its process in scheduled takeovers.
Early disengagement from NDRTs allows for more preparation time and may enhance takeover performance. A limited number of studies have supported this notion. For instance, Wandtner et al. (2018) reported that participants who postponed NDRT disengagement exhibited compromised lateral control performance compared to their baseline in the without-NDRT condition, while others did not, indicating an interaction between NDRT and DTs. Additionally, although Hecht et al. (2022) did not investigate the influence of DTs on takeover performance, they did consider early NDRT disengagement as a default safer option. Therefore, we propose:
Timings of disengagement from NDRTs moderate the impact of NDRTs on takeover performance.
Studies have observed instances where drivers reengage in NDRTs after their first gaze on the road during takeovers (Tan & Zhang, 2022; Xu et al., 2022). Reengagement in an NDRT was seen as an indication of a participant prioritizing the NDRT (Tan & Zhang, 2022), potentially reducing attention allocated to preparing for takeovers (Xu et al., 2022). These studies adopted a single-stage alert, and they predominantly emphasized the negative aspects of drivers’ reengagement in NDRTs. However, in scheduled takeovers with a two-stage alerting system, visual disengagement and reengagement with NDRTs can occur during prewarning and have different implications.
Zeeb et al. (2015) classified drivers into high, medium, and low-risk groups based on their visual behaviors during autonomous driving prior to the TOR. Their research showed that less visual engagement in NDRTs and more focus on the road correlated with a lower risk level and a quicker response to TORs. In line with this notion, we propose that temporary visual disengagement from NDRTs during the prewarning stage indicates reduced attention toward the NDRT and may contribute to earlier eventual disengagement.
Drivers who demonstrate more instances of averting their gaze from NDRT during the prewarning stages are expected to achieve an earlier final NDRT disengagement during scheduled takeovers.
The Current Study
The primary objective of this study was to comprehensively examine when drivers disengage from NDRTs during scheduled takeovers with two-stage alerting systems and how DTs affect takeover performance. Furthermore, the study aimed to establish a link between visual disengagement from NDRTs during the prewarning stage and the eventual DTs. These objectives were investigated through driving simulator-based experiments, in which the NDRT disengagement process of participants was observed from visual, physical, and cognitive perspectives.
Methods
Participants
A total of 37 drivers with valid driver’s licenses, comprising 15 females and 22 males, participated in this study. Their ages ranged from 18 to 52 years old (Mean = 30.2, SD = 8.43), and their driving mileage varied from 5000 km to 400,000 km (Mean = 101,500 km, SD = 104,200 km). None of the participants had prior experience with Level 3 or higher automated driving. However, 11 participants had previous exposure to lower-level driver assistance features, such as adaptive cruise control and lane-keeping assistance. As a token of appreciation for their participation, participants who completed the study were rewarded with a gift valued at 100 RMB.
This study received approval from the Ethics Committee at the University of Nottingham Ningbo, China, ensuring adherence to ethical guidelines. Informed consent was obtained from all participants through a signed consent form.
Apparatus
In this empirical study, a driving simulator was employed (Figure 1), utilizing the bodyshell of a Chery QQ car. The original steering wheel, brake, and instrument platform were replaced with a Logitech G29 steering control and pedal set. The G29 steering wheel was customized to a larger size, measuring 14 inches. The driving environment was simulated using CARLA (Dosovitskiy et al., 2017) and was displayed across three screens surrounding the car bodyshell. Additionally, a camera was positioned on the rear-right-hand side of the driver’s seat to monitor driver behavior. The driving simulator.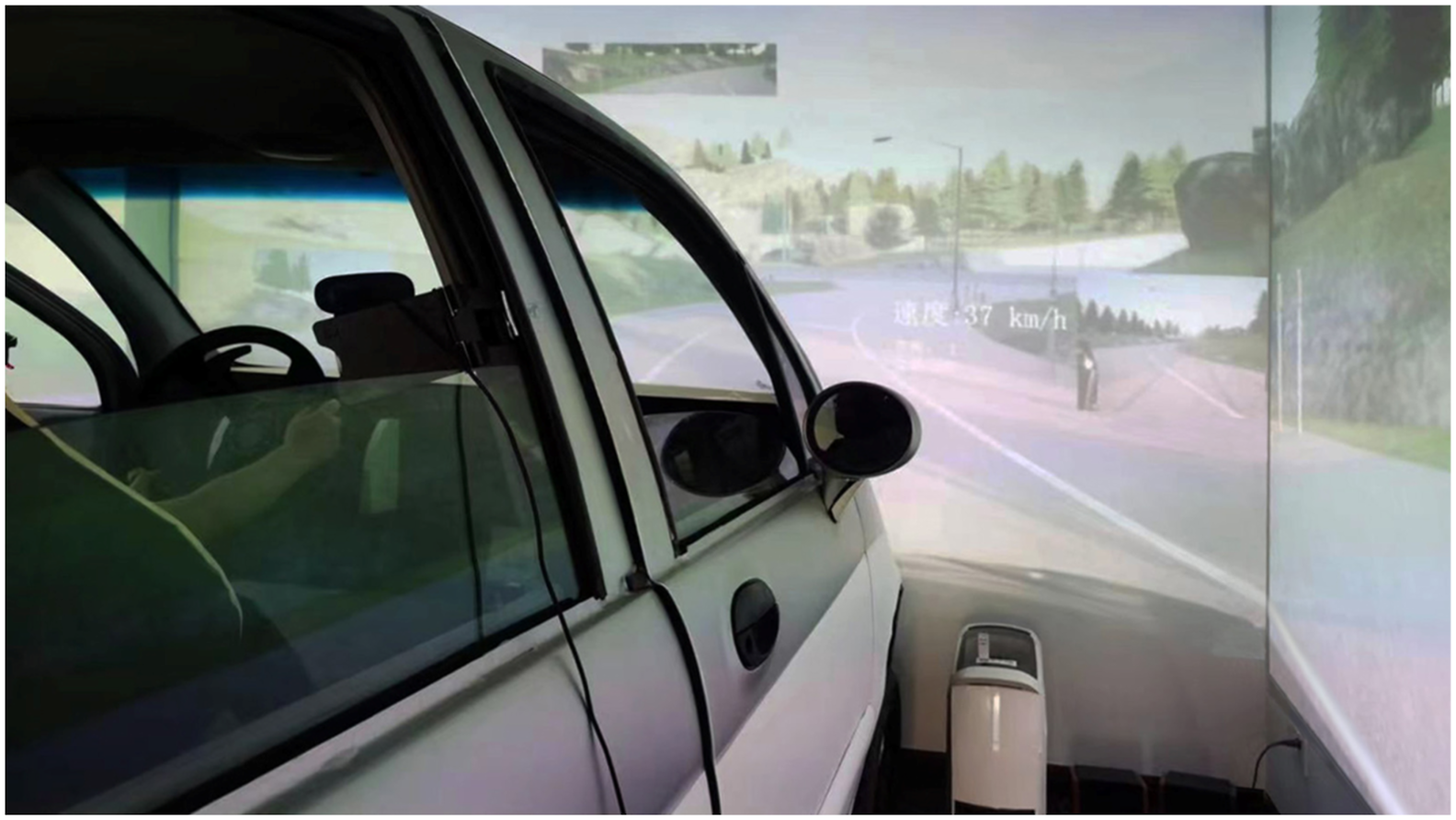
Tobii Pro2, a head-mounted eye-tracking device, was utilized to monitor drivers’ eye movements (Figure 2). This system operated at a detection rate of 50 HZ, with an accuracy of .5 degrees of visual angle. The eye-tracking device.
Experimental Design
The experiments employed a within-subject design with two conditions: one involving an NDRT and another as a baseline without an NDRT. Participants completed both trials, and the order was counterbalanced to mitigate the potential learning effect. To further counteract potential biases, the driving directions were reversed between the two test trials, as illustrated in Figure 3. Each trial involved 4 minutes of autonomous driving, followed by approximately 2 minutes of manual driving. Driving route (a) First trial; (b) second trial.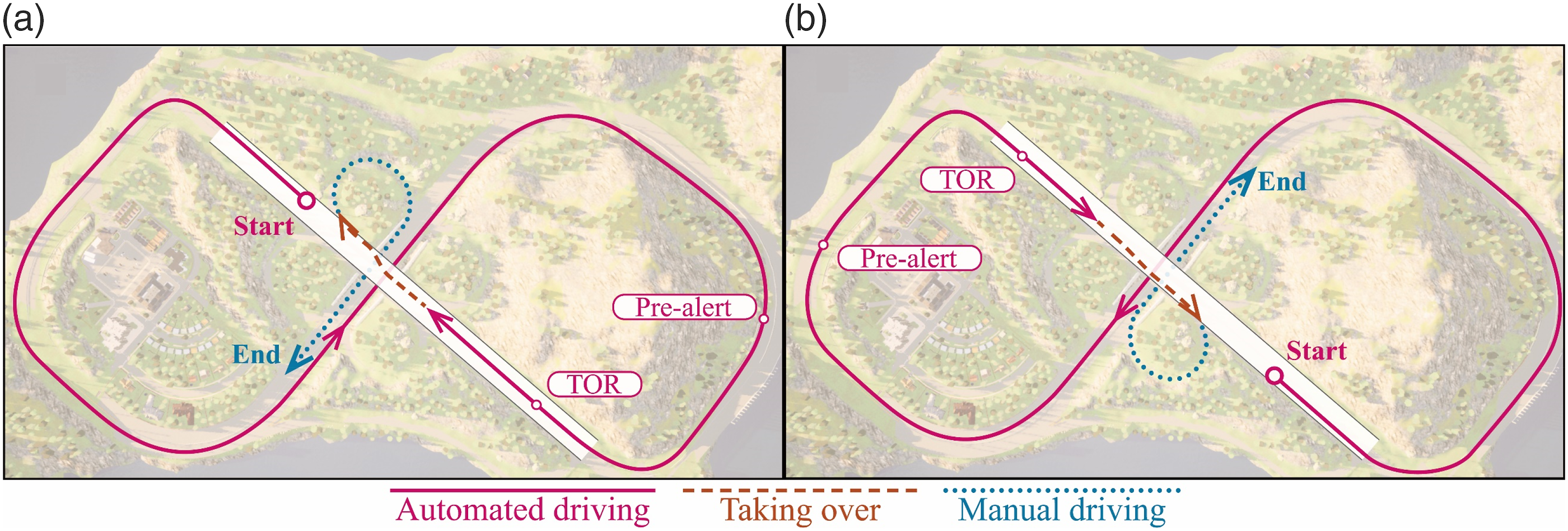
The autonomous driving phase unfolded along an eight-lane road, split into four lanes in each direction. To enhance the simulation’s realism, we generated twenty vehicles positioned around the ego vehicle at the starting point. During the takeover period, four vehicles ran in the two lanes to the left of the ego vehicle, but no vehicle appeared in the ego and right lanes.
The scheduled takeover scenario was set as exiting an overpass, following a setup used in prior studies (e.g., Holländer & Pfleging, 2018; Worle et al., 2020). Drivers could take over by depressing the accelerator or brake pedal or turning the steering wheel. After taking over, participants were instructed to transition to the right adjacent lane, and then exit via a circular single-lane ramp (Figure 4). Takeover scene.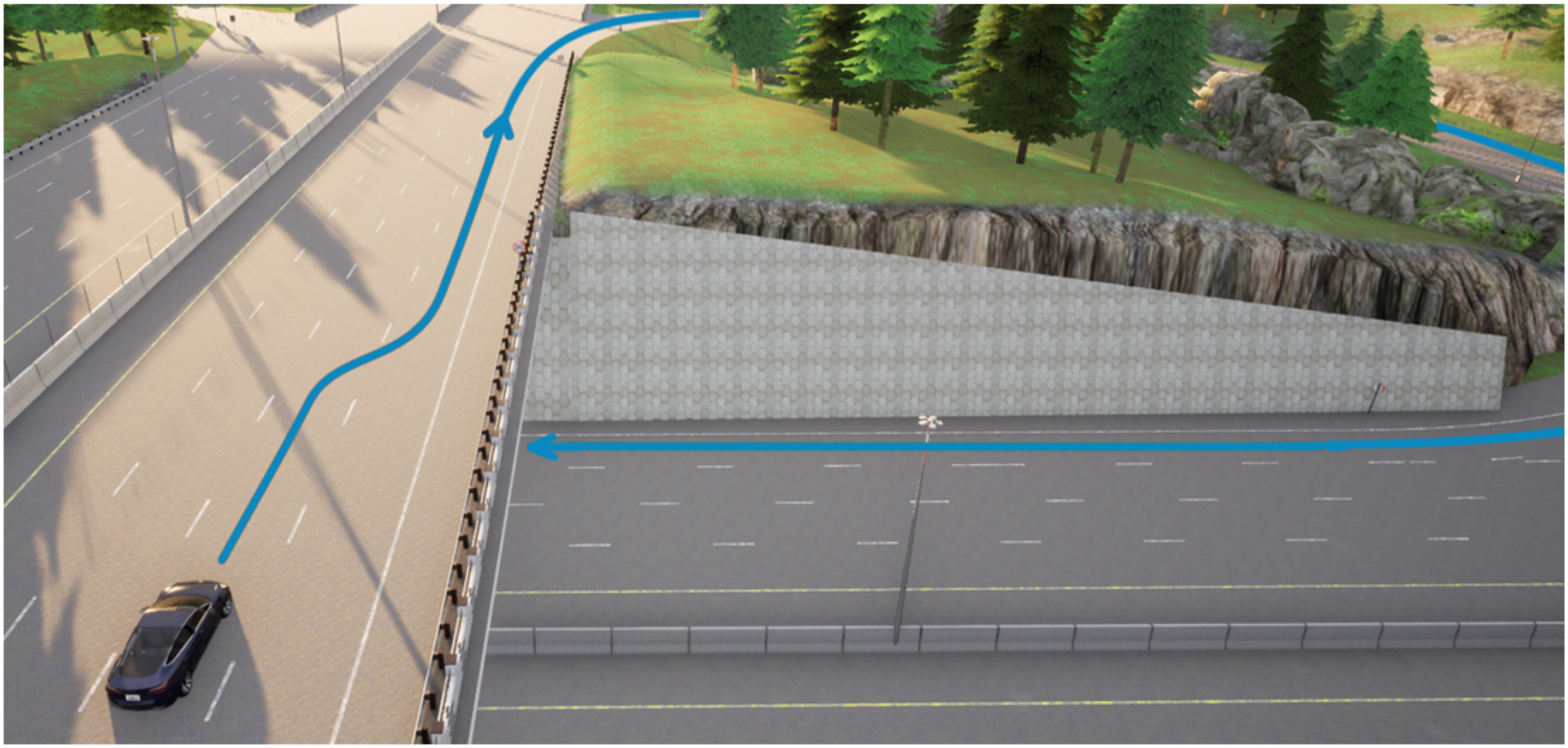
This study simulated an L4 ADS, obviating the necessity for abrupt takeovers during autonomous driving. According to SAE International, 2021, L4 ADSs can execute operations with minimal risk if drivers cannot take over. However, there has yet to be a consensus regarding the definition of minimal-risk conditions for takeovers at freeway exits. In this study, if drivers failed to take over within the given time, the vehicle would proceed beyond the exit and pull over to the roadside. This approach was inspired by strategies observed in previous studies, such as continuous driving along the freeway (Holländer & Pfleging, 2018) and stopping in the current lane (Worle et al., 2020).
Two-stage Alerting System.

Screenshot of visual cues projected to the scene and the English translation.
The NDRT chosen for this study was a word puzzle game designed to solve six clues using no more than two one-word answers (see Appendix 1). These clues were printed on an A4-sized paper and affixed to a cardboard support. Participants were provided with a pen for note-taking. A holder for the NDRT materials was placed adjacent to the steering wheel, allowing participants to easily store the props when transitioning to a takeover scenario.
The selection of this particular NDRT was motivated by its ability to engage all three types of resources under investigation: visual, cognitive, and physical. Additionally, the word puzzle task offered the added advantage of inducing sustained task-related thoughts (Leroy, 2009). The word puzzle task was designed with an unsolvable difficulty level within the allocated time to ensure that it would not be completed before the takeover. Moreover, participants were informed that upon completing the experiment, they would be required to explain their answers and thought processes. This procedure was designed to enhance participants’ motivation to solve the word puzzle by leveraging their innate sense of fulfillment derived from accomplishing a task (Hennessey et al., 2015) and their yearning for acknowledgment of their competence (Reiss, 2004).
Visual and Physical Disengagement Recording
The word puzzle task required participants to engage in both visual perception and manual operation. Instances where participants averted their eyes and withdrew their hands from NDRTs were labeled as visual and physical disengagement, respectively. To track these movements, eye-tracking glasses and a camera continuously recorded participants’ eye and hand motions.
The eye-tracking and camera videos were synchronized using ErgoLAB 3.0 (see Figure 6), an ergonomics analysis software. Periods of “eye-off-NDRT” and “hands-off-NDRT” were marked when gaze points moved outside the NDRT prop, and when subjects were not holding the props, respectively. Synchronization of visual and physical disengagement records.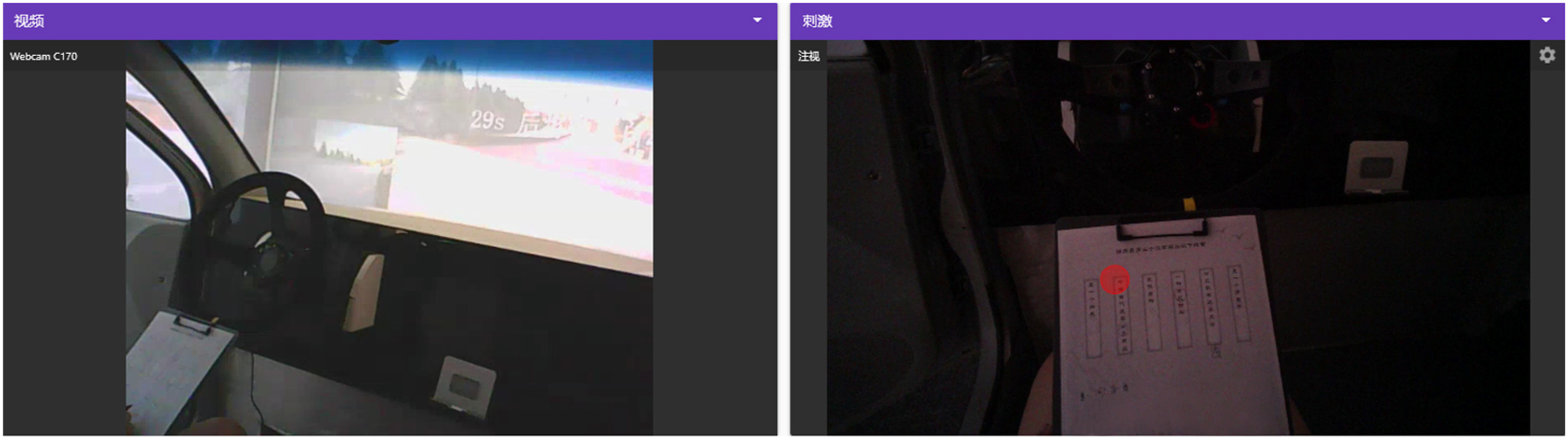
Cognitive Disengagement Recording
Cognitive disengagement data were collected through a method known as eye-tracking-stimulated recall. This approach employs recorded gaze videos to prompt participants to recall their thoughts during a specific event, providing insights into their cognitive processes (Lyle, 2003; Schindler & Lilienthal, 2020). Eye-tracking stimulated recall is particularly suitable when the task being studied does not involve explicit body movement (Bicer & Bicer, 2022).
Participants were shown the eye-tracking videos immediately after the with-NDRT trial. These videos included a segment from 10 seconds before the pre-alert until the conclusion of the experiment. The videos were paused at three specific instances: (1) when the ADS was deactivated, (2) when the ego vehicle entered the exit, and (3) 10 seconds after the previous pause. At these pauses, participants were prompted to indicate whether they had thoughts related to the NDRT in the last 10 seconds shown in the video, responding either “yes” or “no.”
To aid participants in identifying NDRT-related thoughts, we provided them with examples based on a questionnaire developed by Newton et al. (2020). These examples included tasks such as seeking answers for the word puzzle task, planning for further actions related to the word puzzle task, and reflecting on past actions. Participants’ responses and the moments of taking over and entering the exit, were documented on a record form (see Figure 7). Example of cognitive disengagement records.
Pilot Test for Validating the Method for Recording Cognitive Disengagement
While unconventional for labeling quantitative data, the stimulated recall method was the most viable approach given the study’s unique requirements. We aimed to dynamically evaluate participants’ cognitive activities related to the NDRT without interrupting the takeover process. Although automatic classifiers have been developed to detect drivers’ mind-wandering using machine learning methods, achieving optimal accuracy remains a challenge, with reported accuracies ranging from around 60% (Jin et al., 2019) to 67% (Chen et al., 2022). Furthermore, thoughts unrelated to driving may not necessarily be linked to NDRTs.
Thought probing, a well-established method for ascertaining subjects’ thoughts during a specified period (Weinstein, 2018), has been frequently employed in studying drivers’ mind wandering (e.g., Zhang & Kumada, 2018). However, it necessitates participants to report their attention allocation when prompted, interrupting the primary task. In our study, thought probing was utilized to validate the reliability of the results obtained through eye-tracking stimulated recall.
To compare the results obtained from thought probing and eye-tracking stimulated recall, we conducted a pilot test involving twenty participants. This test replicated the training and trial phases detailed in the “Procedures” section but included additional thought-probing operations. The auditory probes read “Any word puzzle thoughts?” for a duration of .8 seconds. Participants were instructed to respond to thought probes by verbally indicating “yes” or “no” based on whether they had thoughts related to the word puzzle task when receiving a probe.
Six probes were automatically delivered at specific times: (1) 20 seconds after the pre-alert, (2) 40 seconds after the pre-alert, (3) 10 seconds after participants took over, (4) 10 seconds after participants entered the ramp, (5) 30 seconds after participants entered the ramp, and (6) 60 seconds after participants entered the ramp. Participants’ responses to the probes were documented on a record form (see Figure 8). Following the tests, eye-tracking stimulated recalls were conducted as previously described. The audio on the eye-tracking video was intentionally muted during playback to ensure participants’ responses were not influenced by any auditory cues or associated memories. Example of the thought probing records (“p#” indicates the probe number).
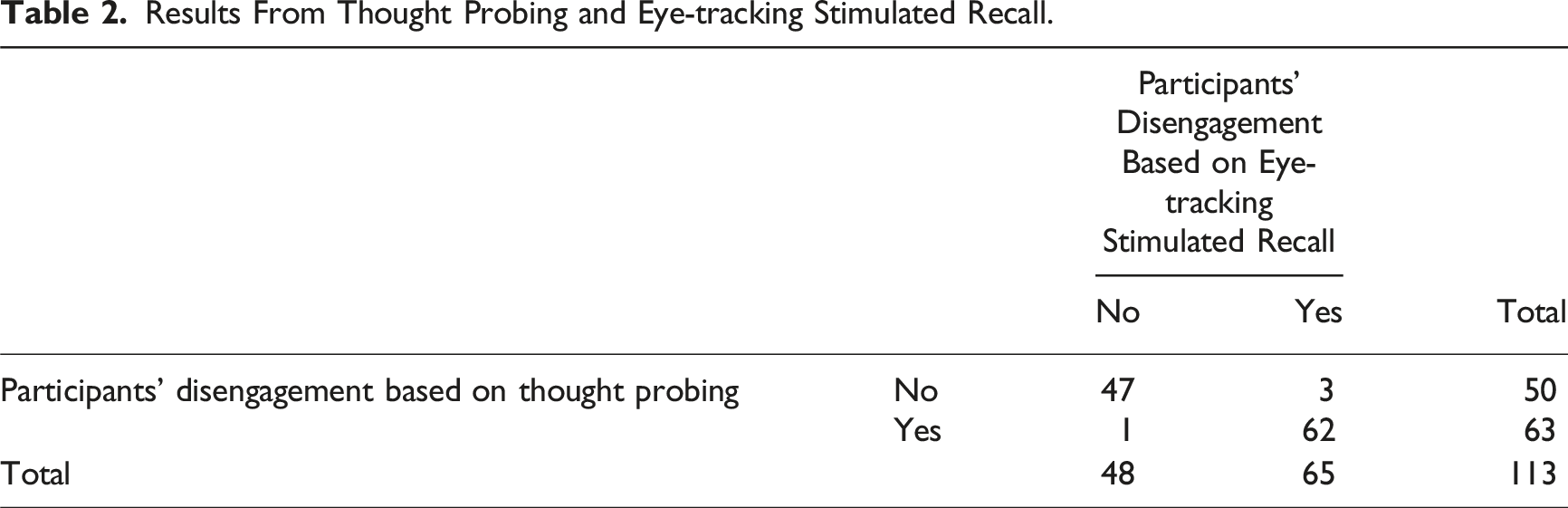
The thought probing technique was employed to label participants’ cognitive status during the 10 seconds prior to the probes, following a well-established approach used in previous studies (He et al., 2011; Zhang & Kumada, 2018). This approach allowed for seamless pairing with the data obtained from eye-tracking stimulated recall, resulting in 113 data pairs.
Results From Thought Probing and Eye-tracking Stimulated Recall.
Posttest Interview
Upon completing both tests, participants were provided with the definitions of visual, cognitive, and physical disengagement. Subsequently, they were instructed to indicate on a timeline, as illustrated in Figure 9, the point at which they deemed it necessary to disengage from NDRTs to ensure a safe takeover. Afterward, a researcher showed them their disengagement records. If the disengagement time exceeded the participants’ voting, they were required to explain the discrepancies. Vote Collection form.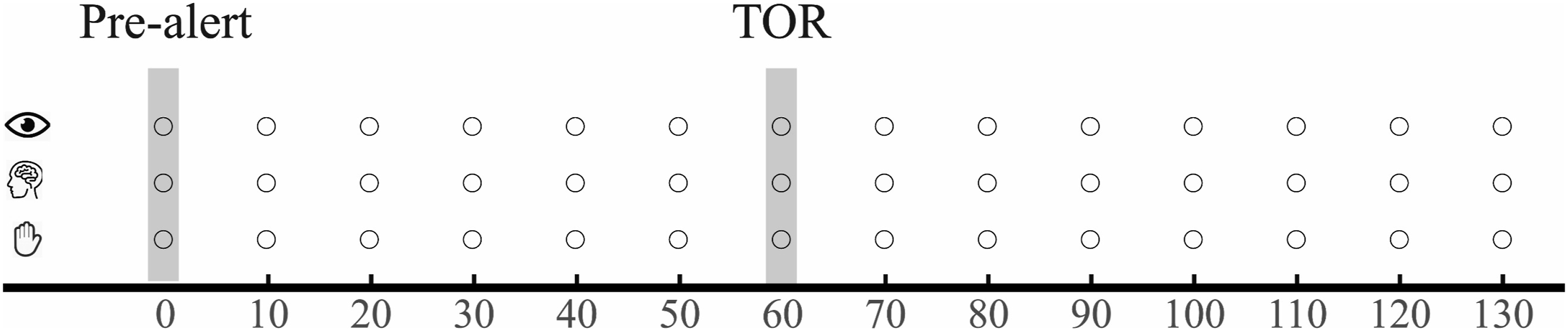
Procedures
Upon arrival at the laboratory, participants were provided with information about the features of the simulated ADS, the rules of the word puzzle task, and the operation of the driving simulator. Since stopping on highways is unsafe, clear instructions were given that they were expected to take over, despite the system being programmed to pull the vehicle over if drivers took no action. Participants were reminded to adhere to real-life driving regulations and exercise caution, as their performance would be evaluated. However, they had the liberty to decide whether and when to disengage from the NDRT, given their potential ability to drive and conduct NDRTs concurrently.
Participants received takeover training on a route identical to the one depicted in Figure 3(a), with the only difference being that the commencement of autonomous driving was set to 5 seconds before the pre-alert. After the takeover training, participants had a three-minute session for free driving to acquaint themselves with the simulator. The trials began once participants confirmed their ability to maintain stable vehicle control. Upon completing the with-NDRT trials, participants’ cognitive disengagement was assessed using the eye-tracking-stimulated recall method detailed in the “Cognitive Disengagement Recording” section.
Dependent Variables
Metrics Used in This Study.
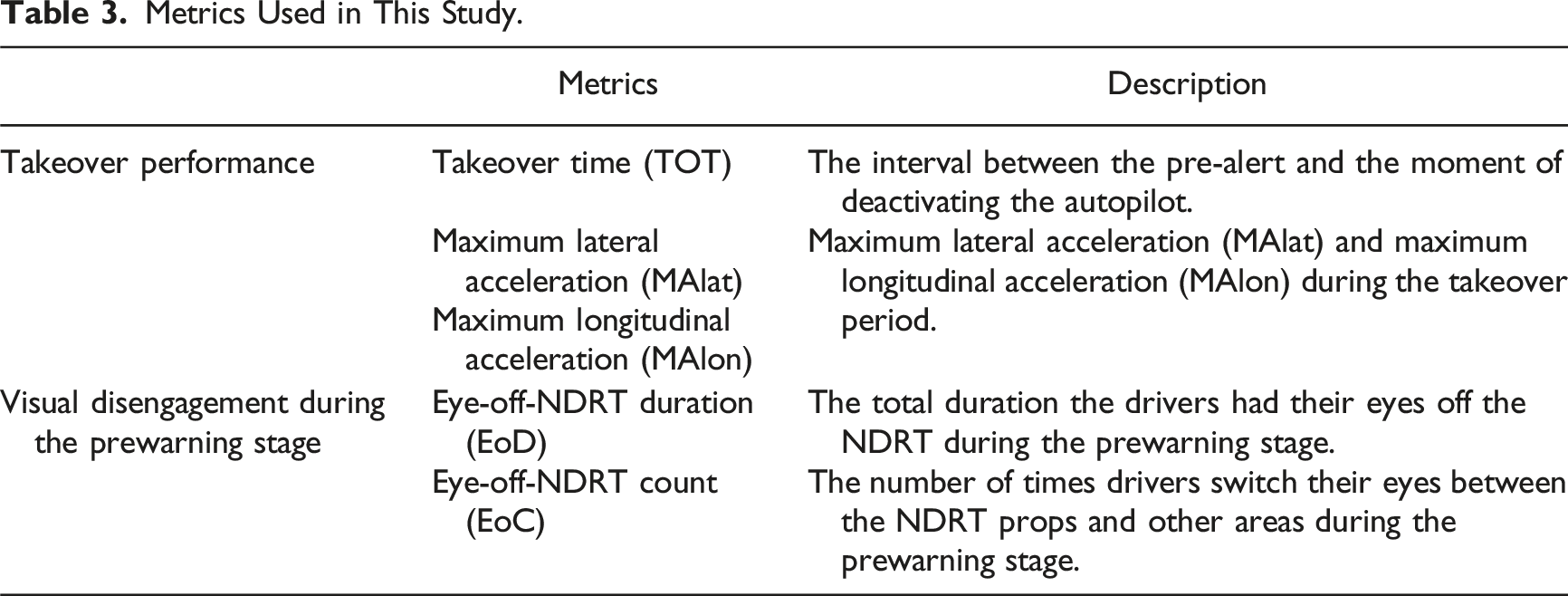
(Cao et al., 2021) categorized takeover performance metrics into two main aspects: time and quality. In this study, we adopted TOT to quantify the time aspect, while MAlat and MAlon were utilized to assess the quality aspect. Generally, shorter TOT is preferable, affording drivers more time to execute the takeover (Dogan et al., 2019; Ma et al., 2020). Conversely, smaller MAlat and MAlon are sought after as they indicate a more controlled and stable takeover maneuver (Lee et al., 2020; Ma et al., 2020).
The assessment of visual disengagement during the prewarning stage was derived from the disengagement recordings outlined in previous sections. Notably, these measurements exclusively pertain to the with-NDRT trials, as NDRT disengagement was not a factor in the without-NDRT trials.
Data Analysis
One subject’s data was excluded from the analysis as the participant failed to take over in time during the with-NDRT trial. Despite the option for drivers to decline taking over and maintain a minimal-risk condition with the L4 ADS, this specific participant was omitted due to the study’s primary focus being on investigating takeover performance and NDRT disengagement.
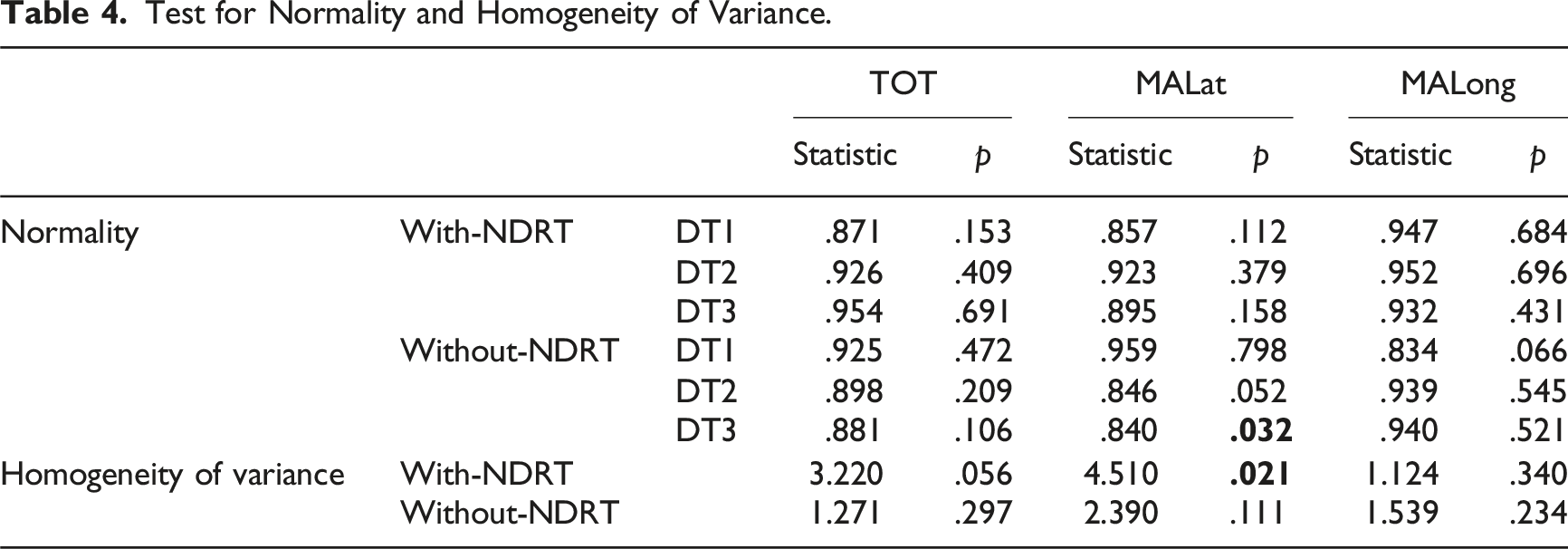
The mixed analysis of variance (ANOVA) was employed to test H1, using NDRT (with and without NDRT) as the within-subject factor and DTs (DT1, DT2, and DT3) as the between-subject factor. The assumption of sphericity was automatically met because the within-subject factor had only two levels. To ensure the absence of salient outliers in any subgroup involved in the comparisons, data from seven participants were excluded. An outlier was defined as a data point whose deviation from the median exceeded three times the interquartile range.
Test for Normality and Homogeneity of Variance.
Recognizing the limitation resulting from omitting outliers, we retained them in the subsequent analyses. A comparison of takeover performance in the with and without NDRT conditions was conducted to investigate the impact of NDRT engagement on scheduled takeovers. Subsequently, participants were categorized into three groups based on their NDRT disengagements timings in the with-NDRT trials. The comparison of takeover performance was performed within each group separately to study the effect of NDRT under varying DTs. Due to the nonnormal distribution of the data, the Wilcoxon Signed-rank Test was employed. Furthermore, comparisons between each pair of the three groups were conducted using the Kolmogorov–Smirnov test.
The Kruskal–Wallis Test was employed to compare visual disengagement during the prewarning stage across the three groups, while pairwise comparisons were carried out using the Kolmogorov–Smirnov test. All analyses were performed using SPSS 28.0, with a significance level set at .05.
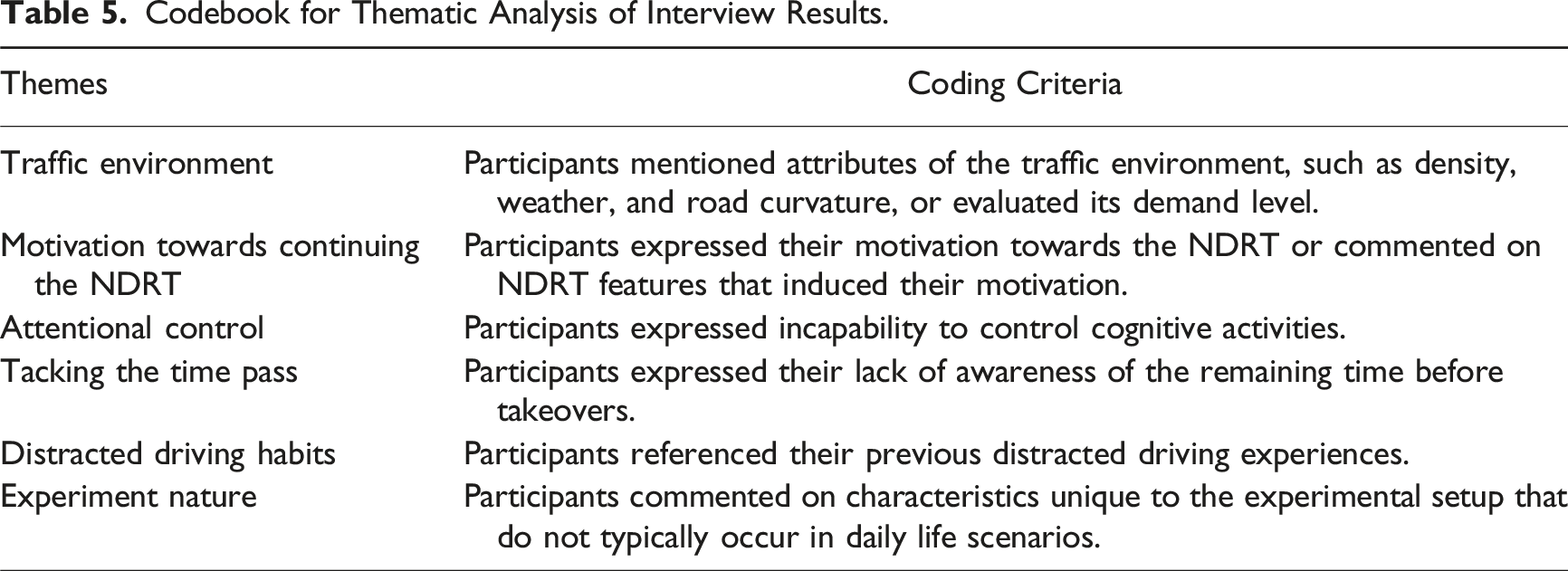
Codebook for Thematic Analysis of Interview Results.
Results
Identification of NDRT Disengagement Timings
Participants were divided into three groups based on their DTs during the with-NDRT condition. The operational definition proposed in this study delineated DTs according to when participants achieved the ultimate stages of visual, cognitive, and physical disengagement throughout the takeover phase. The identified DT groups are as follows (“N” represents the number of participants in each group): DT 1. Disengaged from the NDRT prior to the TOR (N = 12). DT 2. Disengaged from the NDRT before taking over but after TOR (N = 11). DT 3. Continued NDRT (Not disengaged) after taking over (N = 13).
For each group, NDRT disengagement recordings were graphically plotted on a timeline, as illustrated in Figure 10(a)–(c). These figures represent the percentage of participants who maintained engagement with the NDRT from the three perspectives throughout the takeover period, from the issuance of the pre-alert to the moment of entering the ramp. The timelines within the figure depict the countdown of the pre-alert and the TOR. (a) NDRT disengagement recordings of the DT1 group. (b) NDRT disengagement recordings of the DT2 group. (c) NDRT disengagement recordings of the DT3 group.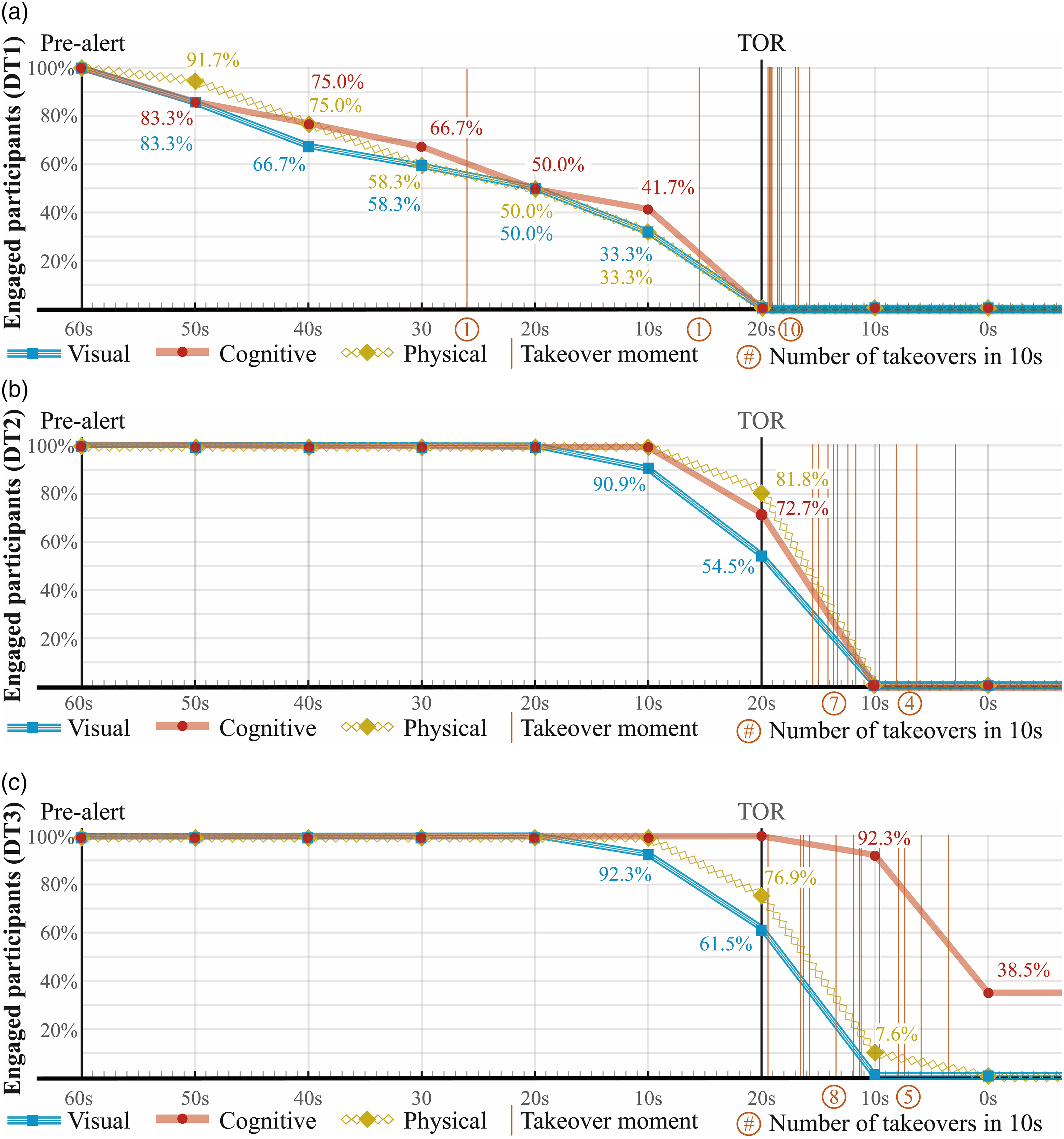
Takeover Performance
Mixed ANOVA analysis showed a significant interaction between NDRT involvement and DTs in terms of their effect on takeover time (F (2, 30.9) = 4.495, p = .021, η2 = .257), but not on the takeover quality metrics (i.e., MALat and MALong). These results partially confirmed our hypothesis that timings of disengagement from NDRTs moderate the impact of NDRTs on takeover performance (H1).
Comparison Between With-NDRT and Without-NDRT Conditions.
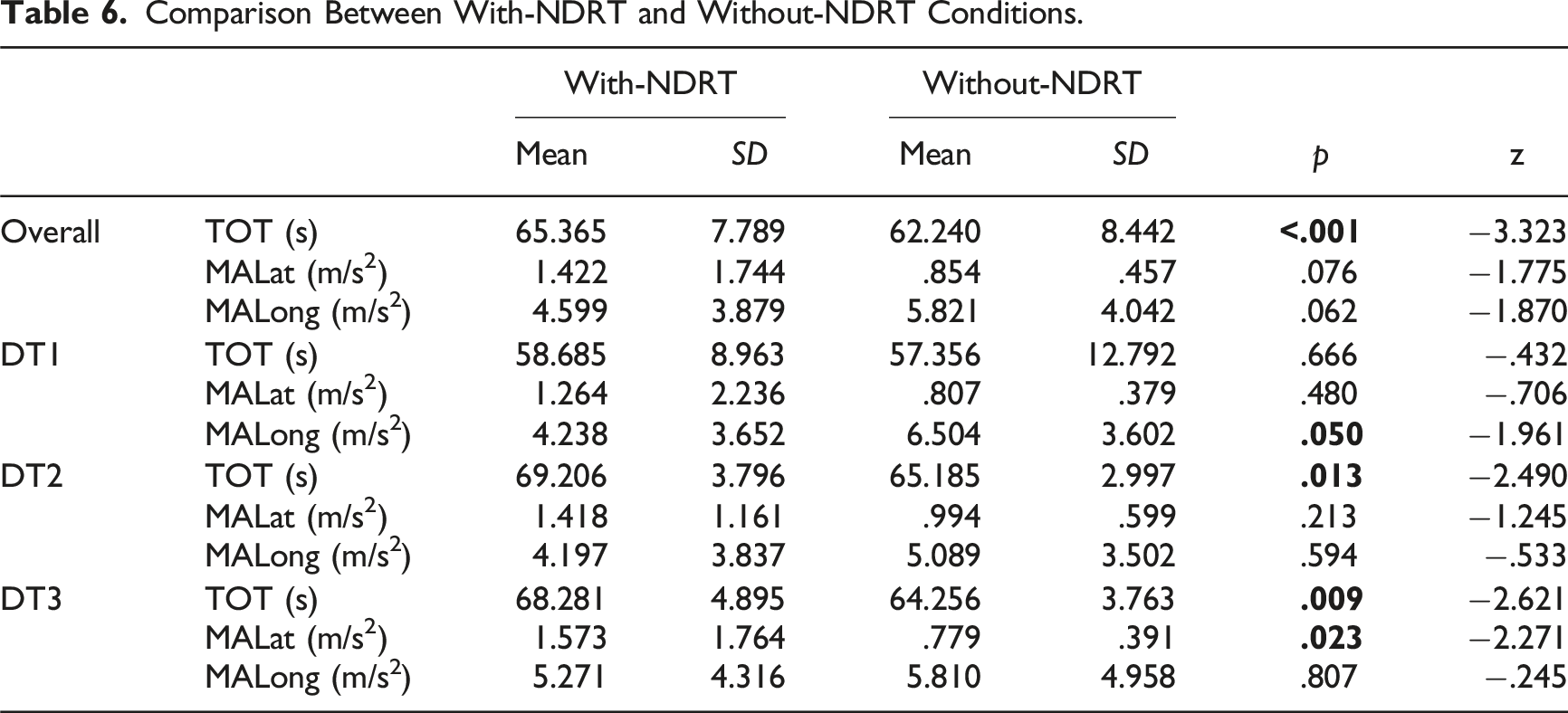
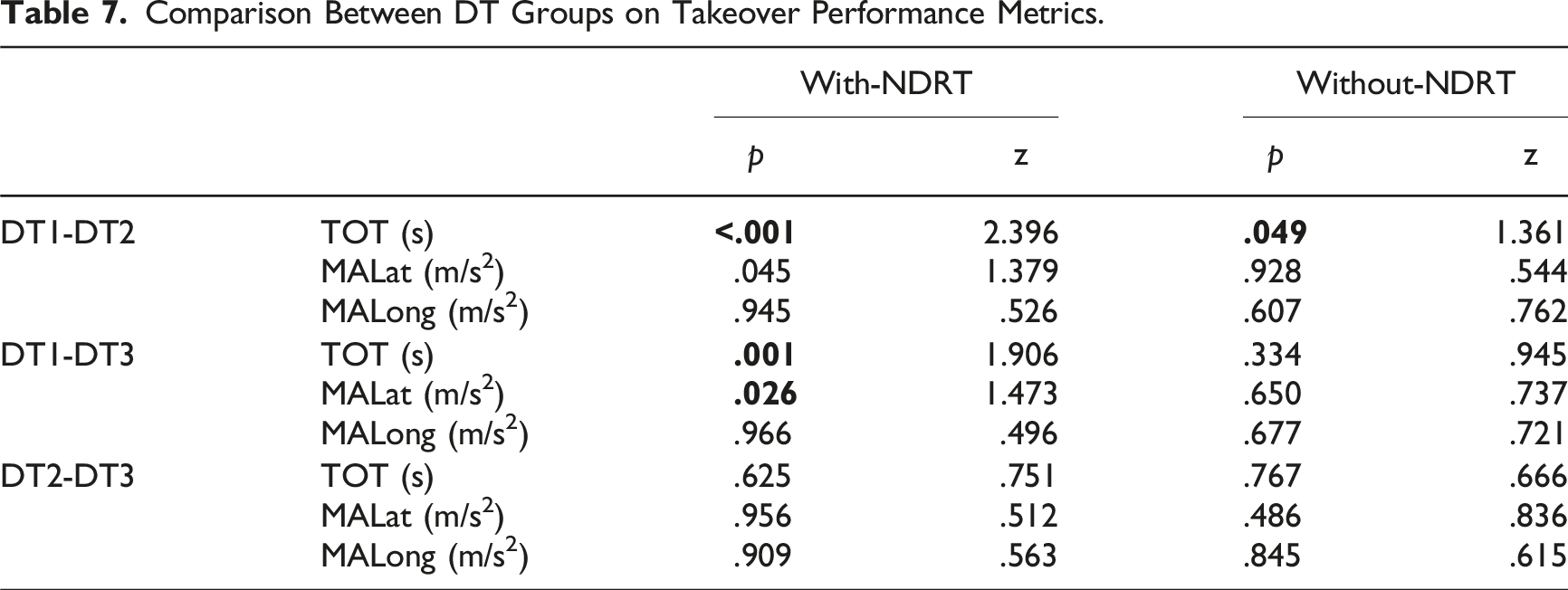
In the DT1 group, NDRT involvement did not significantly hinder participants’ takeover performance. On the contrary, participants demonstrated notably smaller MALong values in the with-NDRT condition, signifying improved longitudinal control performance. Within the DT2 group, the results revealed a significant difference between the with-NDRT and without-NDRT conditions only in terms of TOT. Regarding participants displaying DT3, their takeover performance in the with-NDRT condition was significantly worse, except for the MALong.
Comparison Between DT Groups on Takeover Performance Metrics.
Visual Disengagement During the Prewarning Stage
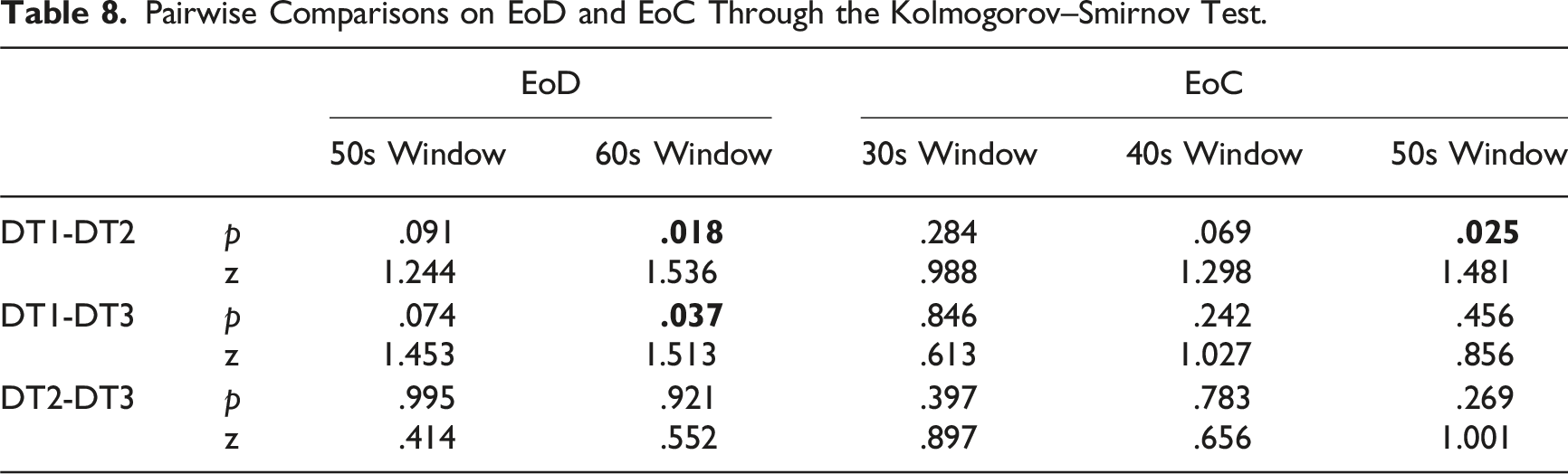
Figure 11 compares average eye-off-NDRT duration (EoD) and count (EoC) across the three groups within six time windows during the prewarning stage. In general, the DT1 group demonstrated the longest EoD and highest EoC among the three groups. In contrast, the DT2 group had longer EoDs than the DT3 group but lower EoCs. The Kruskal–Wallis Test revealed significant differences among the three groups in EoD during the 50s and 60s windows and EoC during the 30s, 40s, and 50s windows. Further pairwise comparisons results indicated significant differences in EoD and EoC for the 60s window between DT1 and the other two groups, but no notable difference was found between DT2 and DT3 (Table 8). Comparison of EoD and EoC across the three groups in different windows (Error bars: 95% confidence interval. “H”: Kruskal–Wallis H value). Pairwise Comparisons on EoD and EoC Through the Kolmogorov–Smirnov Test.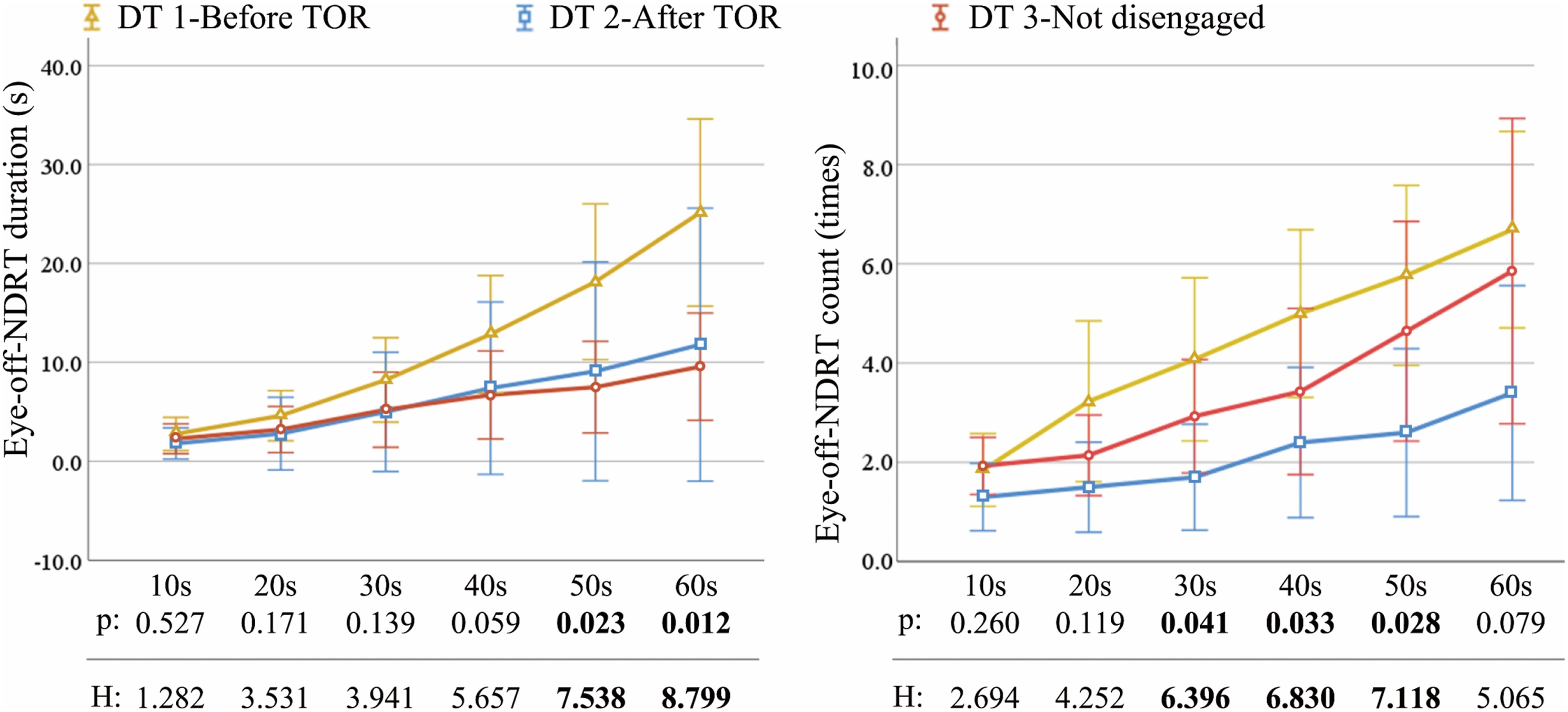
Posttest Interview
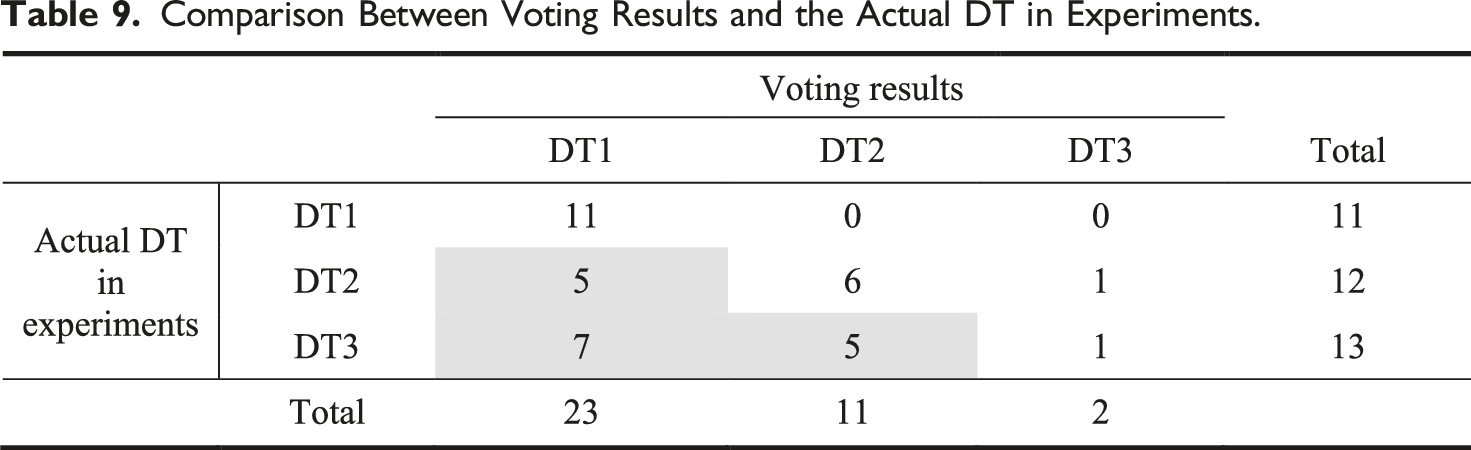
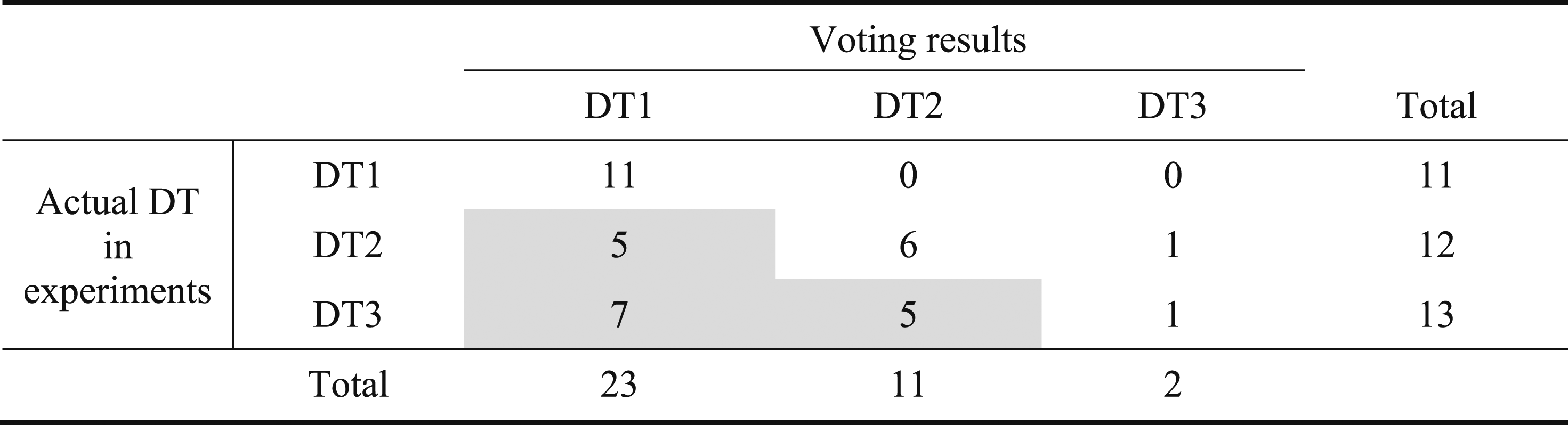
Comparison Between Voting Results and the Actual DT in Experiments.
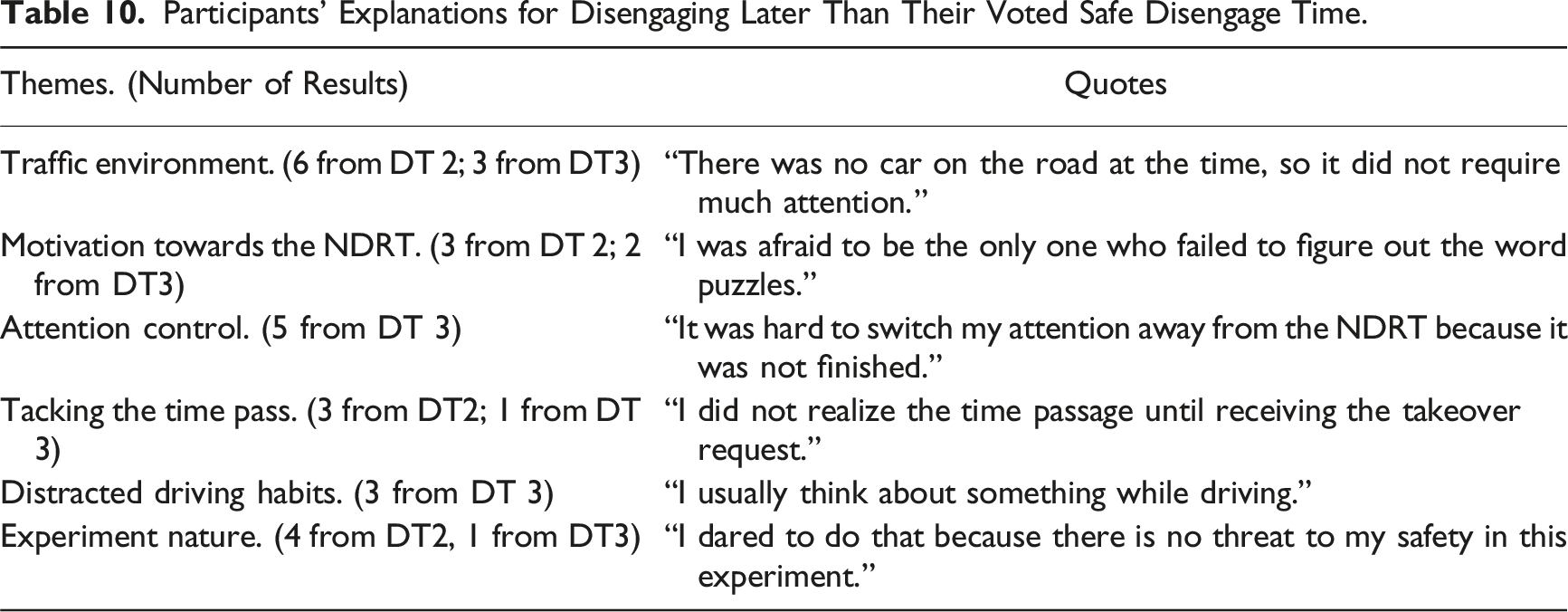
Participants’ Explanations for Disengaging Later Than Their Voted Safe Disengage Time.
Discussion
Identification of NDRT Disengagement Timings
In line with previous studies that utilized a two-stage alerting system for scheduled takeovers, this study confirms the presence of varying disengagement timings (DTs) among drivers (Hecht et al., 2022). The distribution of DTs was observed to be proportionally spread among DT 1, DT 2, and DT 3 at 33.3%, 30.6%, and 36.1%, respectively. This finding underscores the need to examine the effects of DTs and design interventions to regulate them accordingly. While DT3 exhibited the highest proportion in this study, it accounted for only 2.86% in a prior study (Hecht et al., 2022), and no such case was reported by Wandtner et al. (2018). This discrepancy is understandable, considering previous studies did not delve into the cognitive facet of NDRT disengagement.
In this study, participants who exhibited DT3 disengaged from the NDRT visually and physically before taking over, but not cognitively. However, failures in visual and physical disengagement are also plausible, as evidenced by instances of drivers engaging in distraction activities such as texting while driving (Harrison, 2011; Liang et al., 2015). According to the multiple resource model, the difficulty of simultaneously performing two tasks depends on the level of task demand and the overlap in resources they consume (Wickens, 2002). Pure cognitive activities overlap less with driving compared to visual and motoric activities, potentially explaining why cognitive disengagement failure appeared to be more likely in this study.
As depicted in Figure 9, all three groups exhibited delayed cognitive disengagement compared to visual and physical disengagement. Previous research considered drivers as disengaged from NDRTs once their eyes and hands are no longer engaged with the task (e.g., Lin et al., 2019; Mok et al., 2017). However, our study unveils that even when drivers have averted their eyes and hands from NDRTs, they might remain cognitively engaged. In the cases of DT1 and DT2, delayed cognitive disengagement could impede drivers’ readiness for takeovers due to the occupation of cognitive resources.
The delayed cognitive disengagement in cases of DT3 resembles a state of cognitive distraction for drivers. Although pure cognitive distraction has little impact on lane-keeping performance (Cao & Liu, 2013), it is associated with longer response times to sudden events (Yanko & Spalek, 2014). Given that drivers’ situational awareness is often compromised during takeovers compared to traditional manual driving, it becomes crucial to ensure that drivers disengage cognitively from NDRTs after resuming vehicle control.
Analysis of Takeover Performance
This study compared participants’ takeover performance under conditions with and without NDRT. The results revealed significant delays in participants’ TOT in the presence of NDRT, consistent with previous studies on noncritical takeovers at freeway exits (Eriksson & Stanton, 2017; Naujoks et al., 2019). However, the influence of the NDRT on takeover quality did not reach a significant level.
The impact of NDRTs on takeover performance varied based on the disengagement timings, aligning with Wandtner et al. (2018), who reported negative effects associated with delayed NDRT disengagement. In this study, participants demonstrating DT3 were significantly affected by the NDRT in both takeover time and quality, whereas no significant adverse impact from the NDRT was observed for participants displaying DT1. Moreover, the between-subject comparison revealed significantly better takeover performance in the DT1 group than in the other two. This result may be attributed to participants in the DT1 group having more time to resume their situation awareness after disengaging from the NDRT. NDRT engagement has been reported to impair drivers’ situation awareness during takeovers (Marti et al., 2022), whereas rebuilding situation awareness can be a time-consuming process (Lu et al., 2017). Therefore, this study advocates for early disengagement from NDRTs during the prewarning stage in scheduled takeovers.
The DT3 group showed significantly diminished lateral control quality (MAlat) compared to their baseline, while the longitudinal control (MAlon) remained relatively unaffected. This finding aligns with the research conducted by Engstrom et al. (2017), who demonstrated that cognitive distractions have a selective impact on driving performance. Specifically, they found that automatic driving actions are unaffected by cognitive distractions, whereas actions that require cognitive control are impaired. Compared to Malon, MAlat is a more relevant performance measure for lane changing, which is nonautomatic and can be affected by cognitive load (Engstrom et al., 2017; Reimer et al., 2013).
Visual Disengagement During the Prewarning Stage
Participants frequently displayed temporary visual disengagement from the NDRT during the prewarning stage. Notably, the DT1 group exhibited prolonged EoD and a higher EoC compared to the other two groups. These differences became significant after 30 and 40 seconds, respectively, following the pre-alert, confirming H2. Behavioral and physiological data from the early stages have been employed in predicting drivers’ future takeover behaviors (Tan & Zhang, 2022; Wu et al., 2021), while our findings suggest the potential utility of EoD and EoC as predictors for the eventual DTs. However, no significant difference was observed between the DT2 and DT3 groups concerning EoD or EoC, underscoring the challenge of distinguishing these two DTs. Therefore, further research is needed to explore distinguishable factors of DT2 and DT3 in scheduled takeovers.
Tan and Zhang (2022) argued that when drivers look back at NDRTs after initially glancing at the road, they prioritize the NDRT over driving at that moment. However, we propose that frequent visual transitions between the NDRT and the road reflect drivers’ concerns for both driving and the NDRT. Given that the DT1 group showed the highest EoC, a high EoC can indicate a greater likelihood of early NDRT disengagement.
Posttest Interview
Interviews revealed that participants delayed NDRT disengagement primarily due to their perception of low driving demand. While drivers can regulate their NDRT interaction based on task demands (Liang et al., 2015; Tivesten & Dozza, 2015), this self-regulation may not always be effective, as exemplified by accidents on roads familiar to drivers (Intini et al., 2018). Another frequently cited factor, motivation towards the NDRT, can vary depending on the task and situation (De Brabander & Martens, 2014; Malmberg et al., 2015). In line with Wandtner et al. (2018), this study underscores the importance of examining the motivational aspects of NDRTs in scheduled takeovers.
Five participants who demonstrated DT3 reported challenges in attention control, which refers to the ability to regulate information processing based on the current primary goal (Burgoyne & Engle, 2020). Their delayed cognitive disengagement was not intentional but rather a result of these challenges. Prior studies on the task-switching paradigm have suggested that previous tasks can linger in working memory, hindering the swift transition of attention to a new task (Shipstead et al., 2016). In addition, four participants who initially voted for DT1 but later displayed DT2 and DT3 admitted they failed to notice the passage of time until the TOR signal. The NDRT occupying the focal vision necessitated a temporary disengagement to monitor the countdown projected in the scene, which some participants struggled to achieve.
Three participants exhibiting DT3 cited their distracted driving habits, which reflect a person’s typical behavior patterns and strongly indicate future actions (Ouellette & Wood, 1998). Hansma et al. (2020) established a connection between drivers’ habitual cell phone usage in nondriving contexts and their engagement in cell phone use while driving. Similarly, habits formed during traditional manual driving may carry over into takeover situations.
Interviews disclosed that some participants delayed NDRT disengagement due to the simulator-based nature of the experiment, which inherently lacks safety threats. Despite this limitation, driving simulators have proven to be valuable in studying drivers’ takeover behaviors, as evidenced by previous research (e.g., Eriksson & Stanton, 2017; Roche et al., 2019). Furthermore, the simulator used in this study, featuring a car body and a projected immersive driving scene, enhanced realism (Helman & Reed, 2015), and it has been successfully applied in a previous takeover study (Sun et al., 2021).
Implications
First, our results highlight that takeover performance remained relatively unaffected by the NDRT when participants employed DT1, emphasizing the importance of promoting NDRT disengagement during the prewarning stage in scheduled takeovers. Second, it is important to acknowledge the potential for delayed or incomplete cognitive disengagement. Therefore, ADSs should consider this when assessing drivers’ readiness for takeover and implementing strategies to facilitate cognitive disengagement. Additionally, variations in visual disengagement during the prewarning stage among the three DT groups suggest the potential use of visual disengagement as a predictor for eventual DTs.
Limitations and Future Study
One important consideration is that participants faced no safety risks while operating the driving simulator. Consequently, they may have exhibited more audacious behavior than they would have in real-world driving scenarios. On the other hand, despite receiving training before the tests, their familiarity with the simulator differed from their personal vehicles, which could have influenced disengagement behaviors and vehicle control performance. In order to address this concern, future research could be conducted using actual vehicles in controlled testing environments, where safety can be ensured while still capturing realistic driving behaviors.
As detailed in the “method” section, we utilized the Eye-tracking-stimulated recall method, which was the most practical choice available. However, this method has inherent limitations, including being time-consuming and lacking the ability to assess the intensity or intentionality of cognitive activities. In future studies, researchers could explore and develop more advanced methods to detect drivers’ cognitive disengagement dynamically and accurately.
Although results may vary under different conditions, we focused on a single traffic and NDRT condition to emphasize the impact of disengagement timings. Future research should broaden the scope of investigation to better understand the relationship between traffic conditions, NDRT attributes, and disengagement timings.
The participants involved in this study were relatively young, potentially limiting the direct applicability to older age groups. Additionally, the sample size was relatively small, especially when divided into three groups. Future researchers should consider increasing the sample size and including a more diverse range of participants to validate and apply our research.
Conclusion
This study investigated the timing of drivers’ disengagement from NDRTs in scheduled takeovers, delineating three distinct disengagement timings: disengaged before the TOR (DT1), disengaged before taking over (DT2), and not disengaged before taking over (DT3). The impact of NDRTs on takeover performance varied among participants, with the DT1 group demonstrating resilience with no adverse effect, the DT2 group experiencing notable impairment on takeover time, and the DT3 group being adversely affected on both takeover time and quality.
Cognitive disengagement appeared to be likely to be delayed, causing incomplete disengagement from NDRTs after takeovers. However, it can be subject to NDRT attributes and takeover conditions, which is worth further investigation. Furthermore, the DT1 group exhibited longer EoD and higher EoC during the prewarning stage compared to the other two groups. However, no significant difference was observed in EoD and EoC between the DT2 and DT3 groups, underlining the challenge of distinguishing these disengagement timings based on the examined visual cues.
Promoting early disengagement and cognitive disengagement from NDRTs emerges as a promising strategy to enhance readiness in scheduled takeovers. Future research and technology advancements should leverage these insights to develop robust driver assistance systems, ultimately contributing to safer automated driving experiences.
Key Points
In scheduled takeovers with a two-stage alerting system, drivers may disengage from NDRTs before the TOR, after the TOR, or not disengage completely. Participants who disengaged from the NDRT during the prewarning stage demonstrated resilience to the NDRT’s adverse effect on takeover performance. Facilitating cognitive disengagement from NDRTs is essential given its tendency to be delayed. Eye-off-NDRT duration and Eye-off-NDRT count during the prewarning stage can be early signs of eventual NDRT disengagement timings.
Footnotes
Acknowledgments
This work is supported by 2025 Key Technological Innovation Program of Ningbo City under Grant No. 2022Z080.
Clues in the Word Puzzle Game
It is a unit.
It is a type of plant.
It has multiple pronunciation.
It is a type of building material.
It is a type of beverage.
It has multiple colors.
Author Biographies
Jiming Bai is a PhD candidate at the Department of Mechanical, Materials, and Manufacturing Engineering, University of Nottingham, Ningbo, China. He received an MSc degree in integrated product design from Delft University of Technology in 2019.
Xu Sun is a professor at the Department of Mechanical, Materials, and Manufacturing Engineering, University of Nottingham, Ningbo, China. She received a PhD degree in human computer interaction from University of Loughborough in 2010.
Shi Cao is an associate professor with the Department of Systems Design Engineering, University of Waterloo. He received a PhD degree in industrial and operations engineering from University of Michigan, Ann Arbor in 2013.
Qingfeng Wang is an associate professor in Economics at the Nottingham University Business School, Ningbo, China. He received a PhD degree in mathematics from University of Loughborough in 2012.
Jiang Wu is an assistant professor in Product Design and Manufacturing, University of Nottingham, Ningbo, China. He received a PhD degree in industrial design from Eindhoven University of Technology in 2020.