
Abstract
Objective
To determine the effect of handrail cross-section on the speed and quality of reach-to-grasp movements following balance loss in younger and older adults.
Background
Grasping a handrail is a common strategy for balance recovery. For handrails to be effective, the design must enable fast and accurate reactive grasping. Little is known about the effect of handrail cross-section on the timing or quality of the reach-to-grasp movement following balance loss.
Methods
Twenty-four younger and 16 older adults experienced incrementally increasing magnitudes of perturbations in the forward and backward direction until they were no longer able to recover balance. We analyzed the last trial where the participant could recover using only the handrail, without stepping or relying on the harness, the maximum withstood perturbation (MWP). Seven handrail cross-sections were tested.
Results
Handrail cross-section did not affect the speed or timing of the reach-to-grasp reaction for younger or older adults. However, handrail cross-section affected the MWP, the grip types used, and the likelihood of making an error or adjustment when grasping. The greatest MWP and fewest errors occurred with 1.5” round handrails.
Conclusion
The absence of common strategies for accurately grasping complex shapes (reaching more slowly), combined with the higher frequency of errors with larger handrails, suggests that both older and younger adults prioritized quickly reaching the handrail over prehension during reach-to-grasp balance reactions.
Application
This work provides new insights on the effect of age and handrail cross-sectional design on reach-to-grasp reactions to recover balance, which can inform safer handrail design standards.
Introduction
Falls are a leading cause of injury, particularly for older adults (Scott et al., 2010). Individuals use many different strategies to avoid a fall following a balance loss (Gosine et al., 2019, 2021b; King et al., 2011). Approximately 67–81% of younger adults will grasp a handrail or guardrail to recover from an unexpected balance loss on stairs (Gosine et al., 2019, 2021b). Errors in perturbation-evoked grasping have also been reported, increasing the challenge of functional grasping (Cheng et al., 2012; Gosine et al., 2019, 2021b; King et al., 2011; McKay et al., 2013). To maximize handrail effectiveness for balance recovery, a person must be able to reach the handrail quickly and accurately, and obtain and maintain a functional grasp to facilitate high force generation to stabilize the person’s center of mass and slow the momentum of the falling body.
Despite the importance of handrails for balance recovery, the effect of handrail cross-sectional design on the speed and quality of reach-to-grasp reactions is unknown. In volitional reaching, longer movement times and deceleration times are associated with picking up smaller objects under 40 mm deep, and wider objects above 40 mm width (McIntosh et al., 2018); the time increase may permit greater accuracy for objects that require fine control of gripping and increased time to achieve an appropriate grip aperture. However, the brief time scales over which falls occur (often in under 1 s) may limit the time available for reach-to-grasp accuracy (Choi et al., 2015; Hsiao & Robinovitch, 1997). On the one hand, individuals may take longer to reach for complex handrail shapes, to enable an accurate grip. On the other hand, individuals may prioritize rapid reaching, at the possible expense of accurate grasping (i.e., more frequent collisions with the handrail or other errors) (Cheng et al., 2012; Gosine et al., 2019, 2021b; King et al., 2011; McKay et al., 2013).
A further fundamental question is whether models of volitional reaching apply to perturbation-evoked reach-to-grasp movements, which are much faster (Gage et al., 2007). Volitional models of reach-to-grasp include a transportation (or reaching phase) and a grasping (or manipulation phase) (Arbib, 2011; Jeannerod, 1984). An object’s size, shape and orientation affect the grasping phase of volitional reach-to-grasp movements, with longer deceleration times for smaller objects (Berthier et al., 1996). Similarly, the location of the object and distance from the person influence the reaching phase of volitional handhold grasping (Arbib, 2011). When considering age, older adults spend more time decelerating than younger adults and use a larger grip (Bennett & Castiello, 1994; Cicerale et al., 2014). This suggests that older adults use a more cautious strategy, by increasing their deceleration time and grip aperture to increase the likelihood of successful grasping. While these differences associated with an object’s shape and size may be the case for volitional grasping, these differences may not apply to compensatory reach-to-grasp movements.
The objective of this study was to determine the effect of handrail cross-section on the speed and quality of perturbation-evoked reach-to-grasp movements following a forward and backward balance loss in younger and older adults. We hypothesized that the timing of the reaching and grasping components of the movement would both be affected by age and handrail cross-section. We also hypothesized that both age groups would demonstrate more frequent errors with the large complex handrail cross-sections than the small round handrails. This study is part of our larger investigation of the effect of handrail cross-sectional design and age on balance recovery. We previously reported the forces that a subset of participants in the current study applied to the handrail to recover balance (Gosine et al., 2021a). The current study is based on a larger participant sample and investigates complimentary research questions on the speed and quality of the reach-to-grasp movement. This study also compliments our prior investigation of the effect of handrail height on reach-to-grasp kinematics (Komisar et al., 2019) to focus on handrail cross-sectional design, using a different participant sample, experimental setup, and protocol.
Methods
Participants
Participant Demographics (Mean (SD))

Experimental Environment and Participant Instrumentation
The experiment took place in the Challenging Environment Assessment Laboratory, a 5 × 5 m robotic platform (Gosine et al., 2021a). This platform translates backward and forward, to induce forward and backward balance loss, respectively. A handrail was attached to a supporting structure in the center of the laboratory. The handrail was sloped at 38°, corresponding to a handrail on stairs of 7.75” rise and 10” run. The height of the top of the handrail measured 34” in line with the participant’s toes. This represents the minimum height allowed in the current Canadian National Building Code, which is measured at the step edge (National Research Council Canada, 2015). The handrail was instrumented with two tri-axial load cells (AMTI MC3A-6-1000, Advanced Medical Technology Inc, Watertown, MA) to measure applied forces.
We tested seven handrails: 2.5” and 3” round, “tapered” and “decorative” handrails, and a 1.5” round handrail (Figure 1). The decorative handrails were commercially available; the tapered handrail shape resembled the commercially available “6010” milled handrail but was modified to allow custom-sized fabrication and comparison between the shapes. The order of the handrails was randomized to reduce the potential effects of learning and fatigue. Descriptions of the seven handrail cross-sections (from left to right, top to bottom): 1.5” round, 2.5” round, 3” round, 2.5” decorative, 3” decorative, 2.5” tapered and 3” tapered handrails.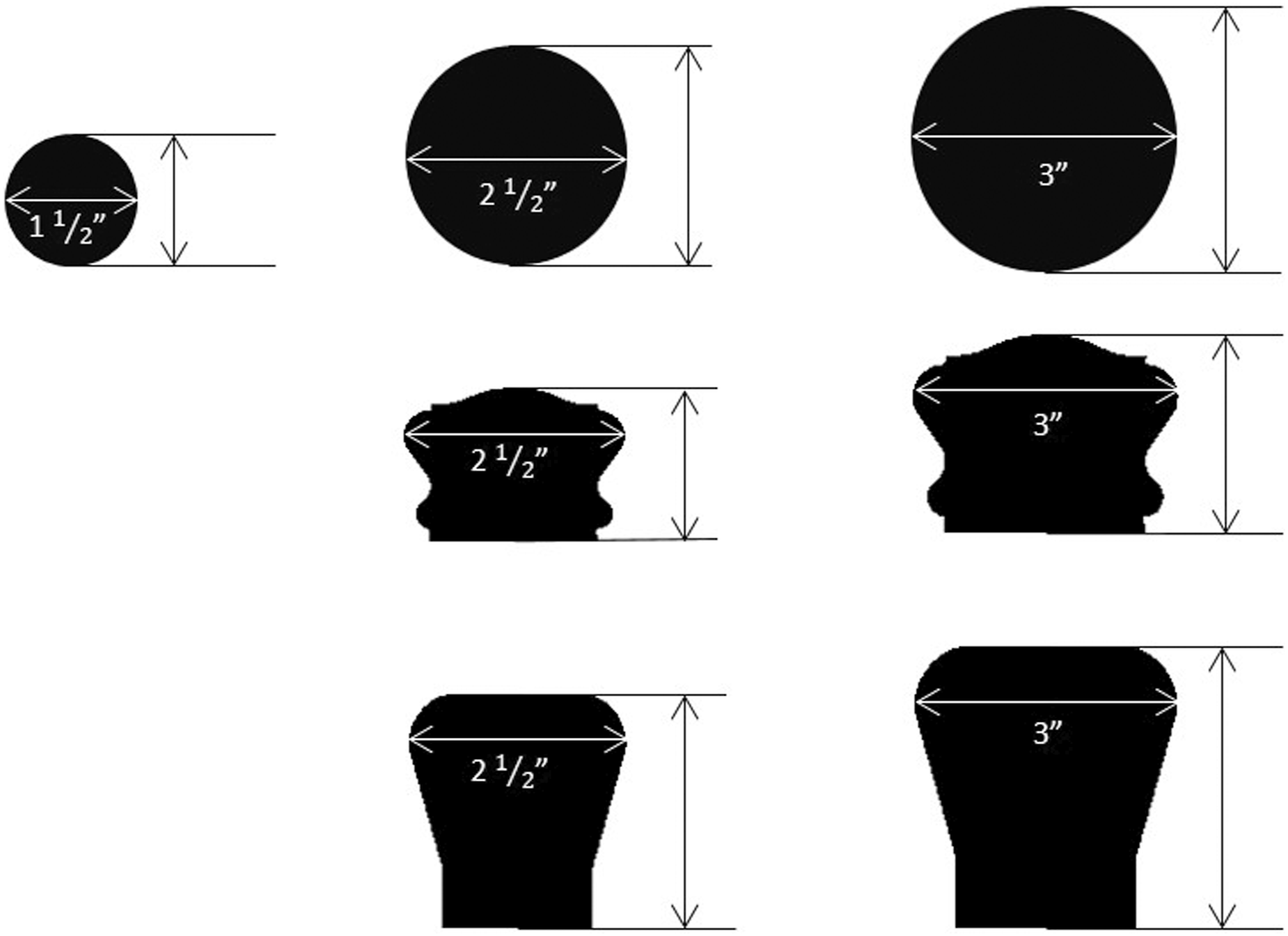
Three-dimensional kinematic data were collected using 15 motion capture cameras and reflective markers placed on the right wrist (radial joint) (Motion Analysis Inc, Santa Clara, CA). Raw marker data were filtered with a 4th order, zero-lag, low-pass Butterworth filter with a cut-off frequency of 30 Hz (Komisar et al., 2019). Three video cameras (positioned to capture a frontal view, side view, and the underside of the handrail) were also used to determine errors in grasping and grip type (30 Hz recording frequency, Grasshopper 0.3 MP Color FireWire 1394b (Kodak KAI-0340D), FLIR Integrated Imaging Solutions Inc). Finally, to prevent injury in the event of a failed recovery reaction, participants wore a fall arrest harness, knee pads, a hockey helmet with a cage, and an elbow pad on the right arm. A load cell (250 Hz recording frequency) was placed in the harness line to record the approximate support that the harness provided to the participant (LSB352-1000lb-FSH02101, FUTEK Advanced Sensor Technology Inc, Irvine, CA).
Protocol
Following instrumentation, participants stood stationary with their centerline 0.6 m away from the handrail (Gosine et al., 2019). Participants experienced randomly timed and directed forward and backward surface translations. They were instructed to try and recover their balance using only their right hand to grasp the handrail, and without stepping, relying on the harness or using anything else in the environment. To reduce anticipation of the perturbation, participants counted backwards from a randomly selected number. To deter stepping, foam blocks were placed in front and behind the participants’ feet (Figure 2). Setup of the lab. Participants stood with their hands at their sides with a 34” height handrail to their right. The platform translated backward (top) and forward (bottom) to induce forward and backward balance loss respectively. Adapted with permission from (Gosine et al., 2021c).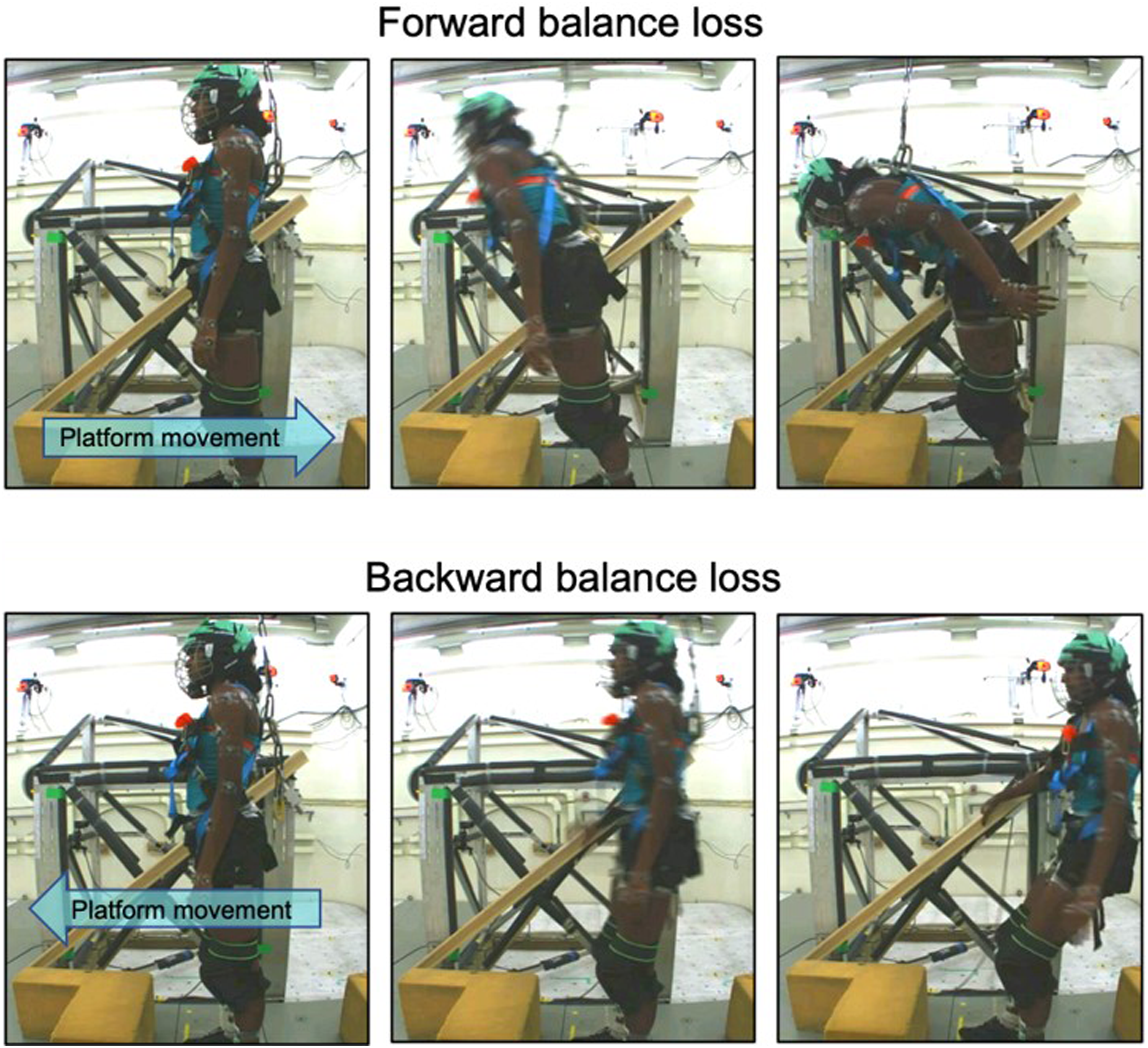
Each handrail was evaluated at the “maximum withstood perturbation” (MWP) (Gosine et al., 2021a), determined using a ramp-up perturbation protocol. Participants experienced a small perturbation (acceleration 1 m/s2 for older adults and 1.5 m/s2 for younger adults) and if their recovery was successful, the perturbation level was increased by 0.5 m/s2 (up to a maximum acceleration of 5 m/s2). All perturbations had a duration of 0.6 s, with a 0.3 s acceleration pulse and a 0.3 s deceleration pulse (Figure 3). A successful recovery trial was defined by one recovering balance without stepping, using the harness (harness load of >20% body weight (Carbonneau & Smeesters, 2014)), using two hands on the handrail, or contact with environmental features other than the handrail. If a trial was not successful, the perturbation level was repeated until two failed trials (considered a failure) or two successful trials occurred (considered a pass; perturbation level was then increased). The MWP was defined as the perturbation magnitude of the last successful trial prior to failure, and represents a balance loss scenario where the highest demands are placed on the handrail. Sample displacement profiles of the platform during the first four perturbation magnitudes (1.0 m/s2 to 2.5 m/s2).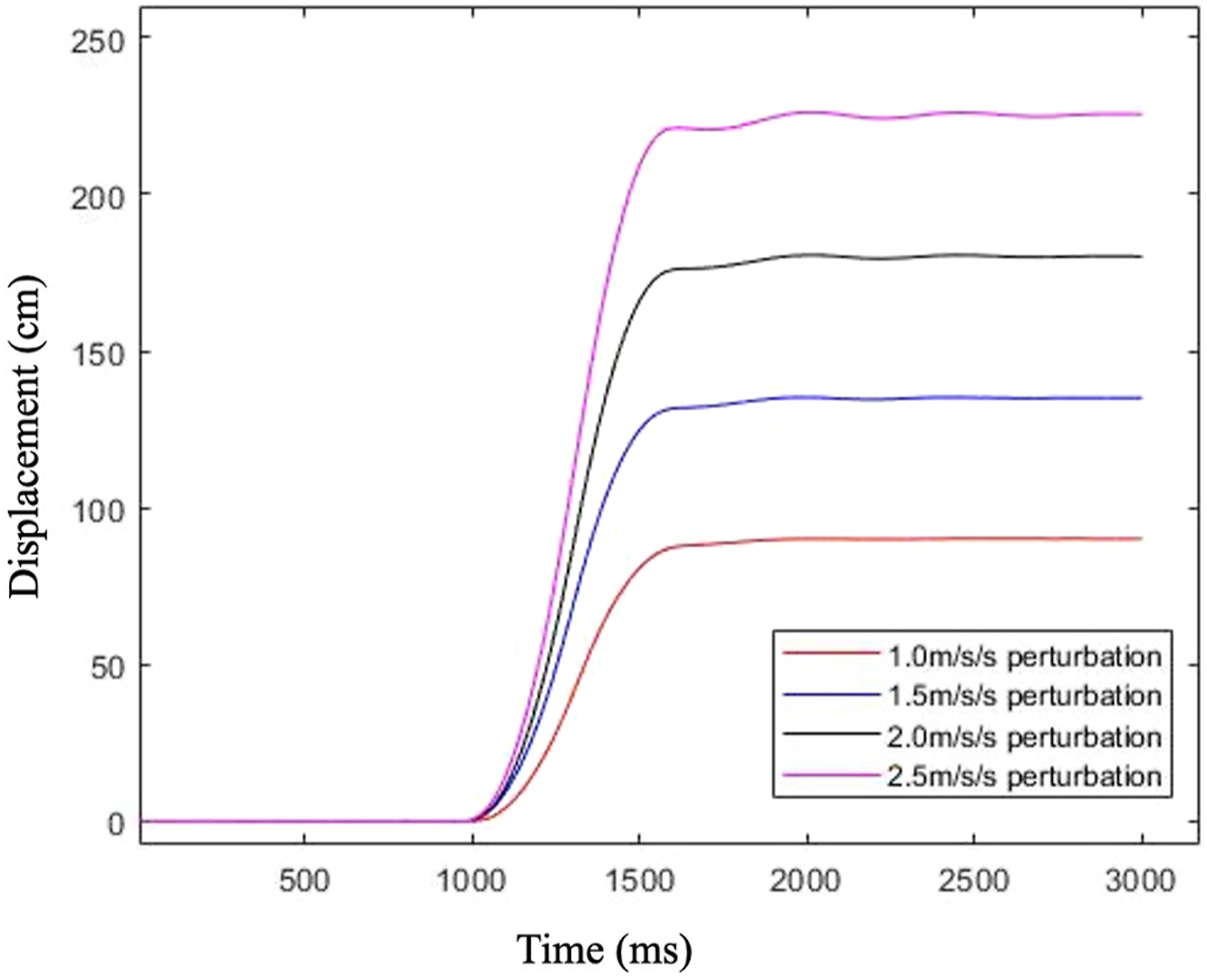
Before testing, participants completed 12 practice trials with the first handrail tested to allow participants to become accustomed to the platform movement. These trials were not analyzed. During the practice trials, a ramp-up protocol was used; however, failed perturbation levels were repeated until the participant successfully recovered their balance or completed six backward and six forward balance loss trials. The ramp-up protocol was then re-started for each of the seven handrail cross-sections.
Data Analysis
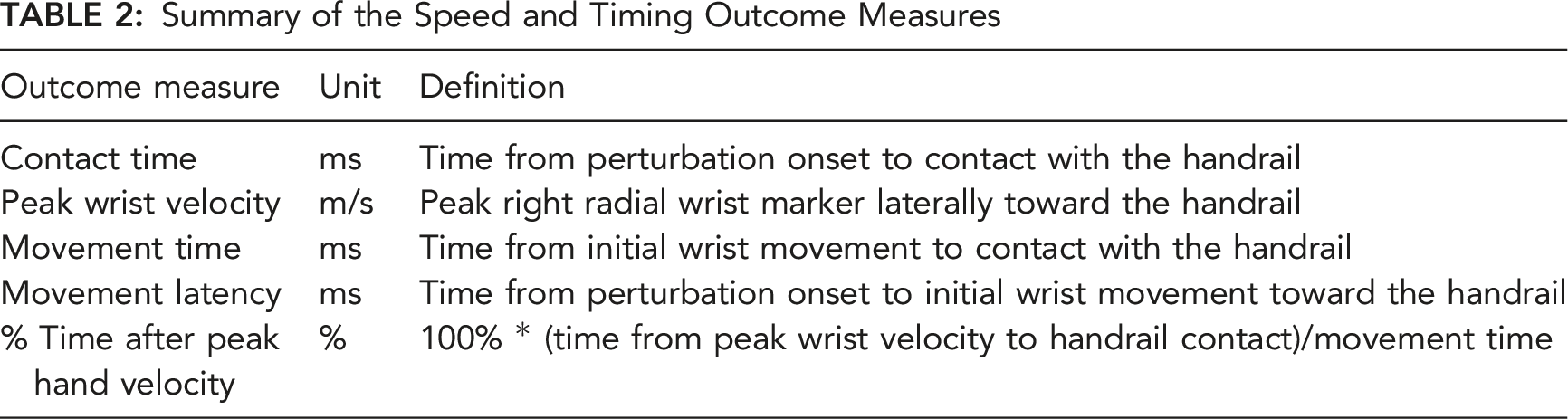
Summary of the Speed and Timing Outcome Measures
Grip Types
The quality of the reach-to-grasp reaction was quantified by determining grip type, percent of errors or adjustments made to the grip type, and comfort rating. Grip type and thumb position were determined by two reviewers at the frame of handrail contact and during balance recovery using video analysis. Seven grip classifications (parallel extension, small diameter cylindrical, medium diameter cylindrical, large diameter cylindrical, partial disk, full disk and fixed hook) were developed based on the GRASP taxonomy of static human grasp types (Feix et al., 2016). Since the extent of palm involvement could not be accurately quantified in the current setup, precision and power grips as defined by the GRASP taxonomy were not specified. The position and bend of the fingers and thumb were defined by two reviewers assessing video frames from the side, frontal view and underneath the handrail. Three thumb positions were classified as illustrated in Figures 4E–G (Feix et al., 2016). We calculated the percent of trials that resulted in each grip type and each thumb position for each handrail type during balance recovery. A video camera directed at the handrail was used to differentiate between grip types (A–D) and thumb positions (E–G). For grip types defined when using the round handrail (a, b), the camera was used to determine the percentage of projected view covered by the fingers. If the fingers covered less than 50% of the projected view, it was deemed a large cylindrical grip (A). If the fingers covered more than 50% of the projected view, it was deemed to be a medium cylindrical grip (B). For decorative and tapered handrails, if fingers did not curl around the flat underside of the handrail, it was deemed a partial disk (C). If the fingers curled around the flat underside of the handrail, it was deemed a full disk (D). When determining thumb position, the abducted position was classified as the thumb opposing the fingers (E). The adducted narrow position corresponded to the thumb being on the same side of the handrail as the fingers (F), while an adducted wide position corresponded to the thumb being on top of the handrail (G).
The thumb positions were:
The grasp types were: • • • • • • •
Error Types
Error types were classified using video analysis by two reviewers. We calculated the percentage of participants who made an error for each handrail cross-section and balance loss direction • • • • • An • A • A
Comfort Ratings
Participants rated comfort after completing each handrail set. Each participant indicated if the handrail was very uncomfortable, uncomfortable, neutral, comfortable, or very comfortable.
Statistical Analysis
General Linear Models were used for all outcomes, with age as a between-subject factor, handrail cross-section as a within-subject factor, and perturbation magnitude as a covariate. Participant ID was included as a random factor. By using a repeated measures design to understand differences between handrails, we accounted for the differences in anthropometric variables across participants. For categorical outcomes, we used General Linear Models to estimate the probability of error in grasping. For speed and timing variables, data were rank-transformed to correct for normality and homogeneity of variance assumption violations (Conover & Iman, 1981). Statistical significance of p < 0.05 was used for all outcome measures. For statistically significant main and interaction effects, post hoc pairwise comparisons with Tukey corrections were used to test the effect of handrail shape on outcome measures. Backward and forward balance loss was analyzed separately.
Results
All participants completed the full protocol. One younger adult was excluded from analysis as they did not apply adequate handrail forces to reach the threshold for handrail contact (10 N).
Maximum Withstood Perturbation Magnitude (Mean (SD) m/s2) Achieved for Each Handrail Cross-section for Older and Younger Adults in Forward and Backward Balance Loss
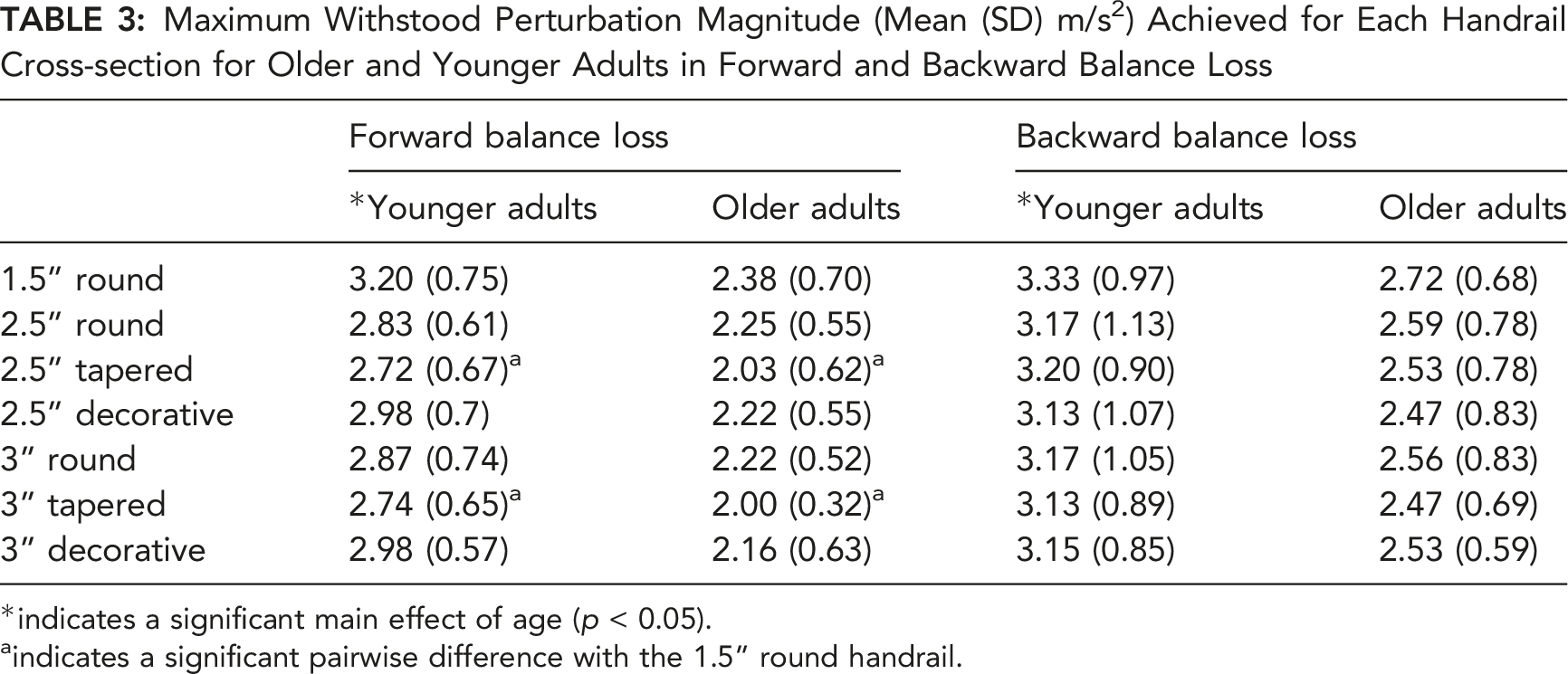
*indicates a significant main effect of age (p < 0.05).
aindicates a significant pairwise difference with the 1.5” round handrail.
Speed and timing of the reach-to-grasp reaction
Summary of Mean (Standard Deviation) of Speed and Timing Outcome Measures for Forward and Backward Balance Loss Across All Handrails
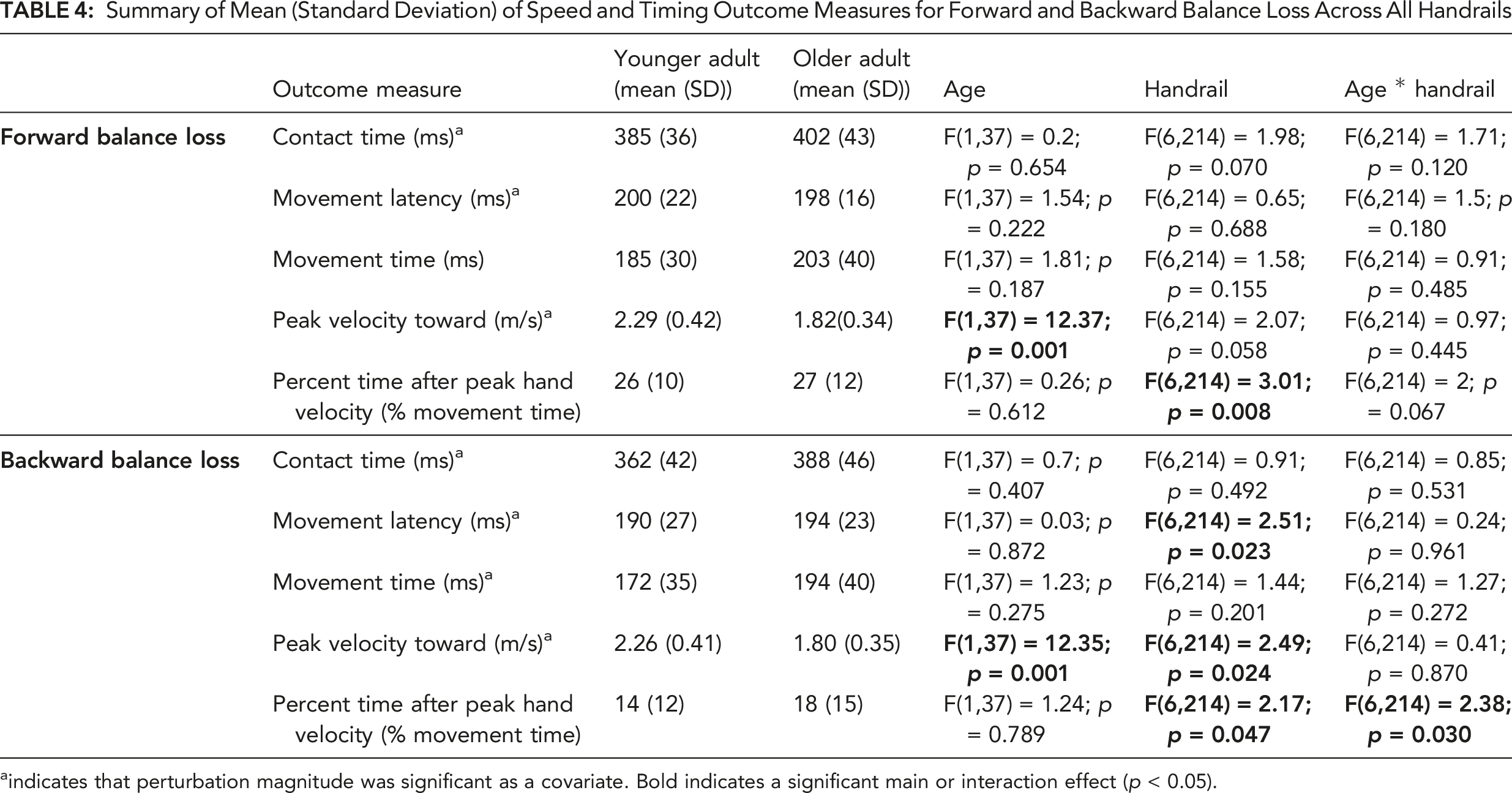
aindicates that perturbation magnitude was significant as a covariate. Bold indicates a significant main or interaction effect (p < 0.05).
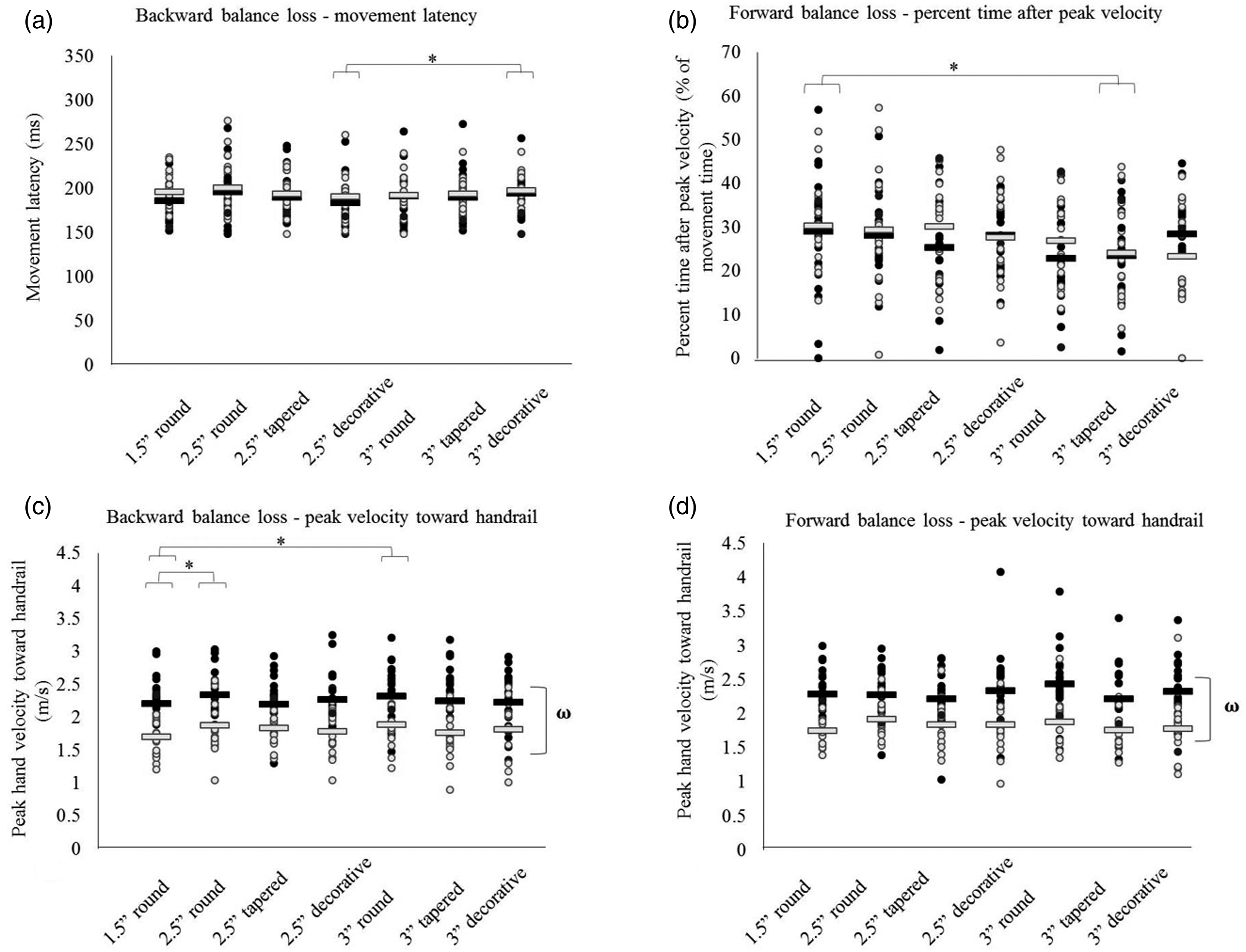
Select speed and timing outcome measures with statistical significance, presented for each handrail cross-section. The black dots represent individual younger adult data, with the group mean represented by the black bar; the gray dots represent individual older adult data, with the group mean represented by the gray bar. ω indicates a significant difference in age, * indicates a significant main effect of handrail cross-section (p < 0.05).
In forward balance loss, handrail cross-section also did not affect most speed and timing outcomes (p ≥ 0.070), apart from percent time after peak velocity (p = 0.008). In this case, the 1.5” round handrail had longer percent time after peak velocity than the 3” tapered handrail (p = 0.035) following a forward balance loss; however, there was large variability in the data (Figure 5).
In backward balance loss, handrail cross-section did not affect movement time (p = 0.201). However, handrail cross-section affected movement latency and peak velocity toward handrail (p ≤ 0.024). The peak velocity toward the handrail was slower for the 1.5” round handrail than for the 2.5” round handrail and 3” round handrail (p ≤ 0.048). For percent time after peak hand velocity, there was a small but statistically significant interaction effect (p = 0.030); however, there were no statistically significant pairwise differences between handrails.
Quality of the Reach-to-Grasp Reactions
Regarding grip type, participants often used partial and full disk grips for the tapered and decorative handrails, while cylindrical grips were primarily seen with the round handrails (Figure 6). Parallel extension was rarely used for any handrail shape or size. The 2.5” and 3” tapered, and 3” round did not allow most participants to wrap their hand around the undersurface of the handrail. For these handrails, participants attempted large cylindrical or partial disk grips. Participants used a mixture of grip types were used for the 2.5” round and 3” decorative handrails, though most often used a full disk with the 2.5” decorative handrail. Participants most often used fixed hook grips with 3” round and decorative handrails for both backward and forward balance loss, with some use with 2.5” round, 2.5” decorative, 2.5” tapered, and 3” decorative in forward balance loss. Percentage of participants with each grip type. Data are presented for younger (Left) and older (Right) adults following forward (Top) and backward (Bottom) balance loss.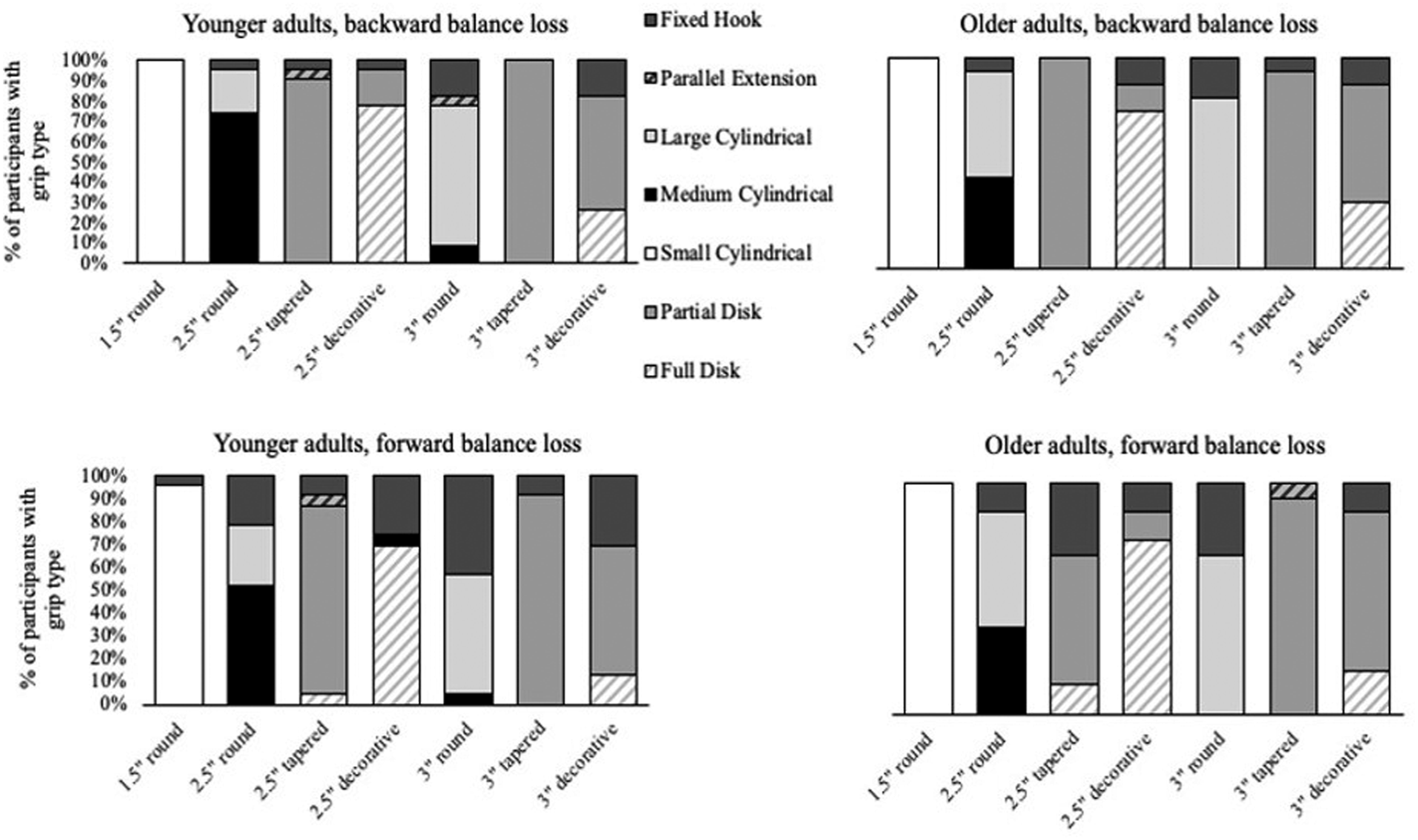
Handrail cross-section significantly affected the likelihood of a participant having an error following a forward balance loss (p = 0.049; Figure 7). Post hoc analyses revealed significantly fewer participants had an error with the 1.5” round handrail than with the 3” decorative handrail (p = 0.034). For backward balance loss, handrail cross-section did not affect the likelihood of error (p ≥ 0.763; Figure 7). No significant age group or interaction effect was found for the percent of participants who experienced errors (p ≥ 0.184). Perturbation magnitude was not a significant covariate when considering errors in reaching or grasping. Percentage of participants with an error or an adjustment in forward and backward balance loss. * indicates a significant pairwise difference between handrail cross-sections (p < 0.05).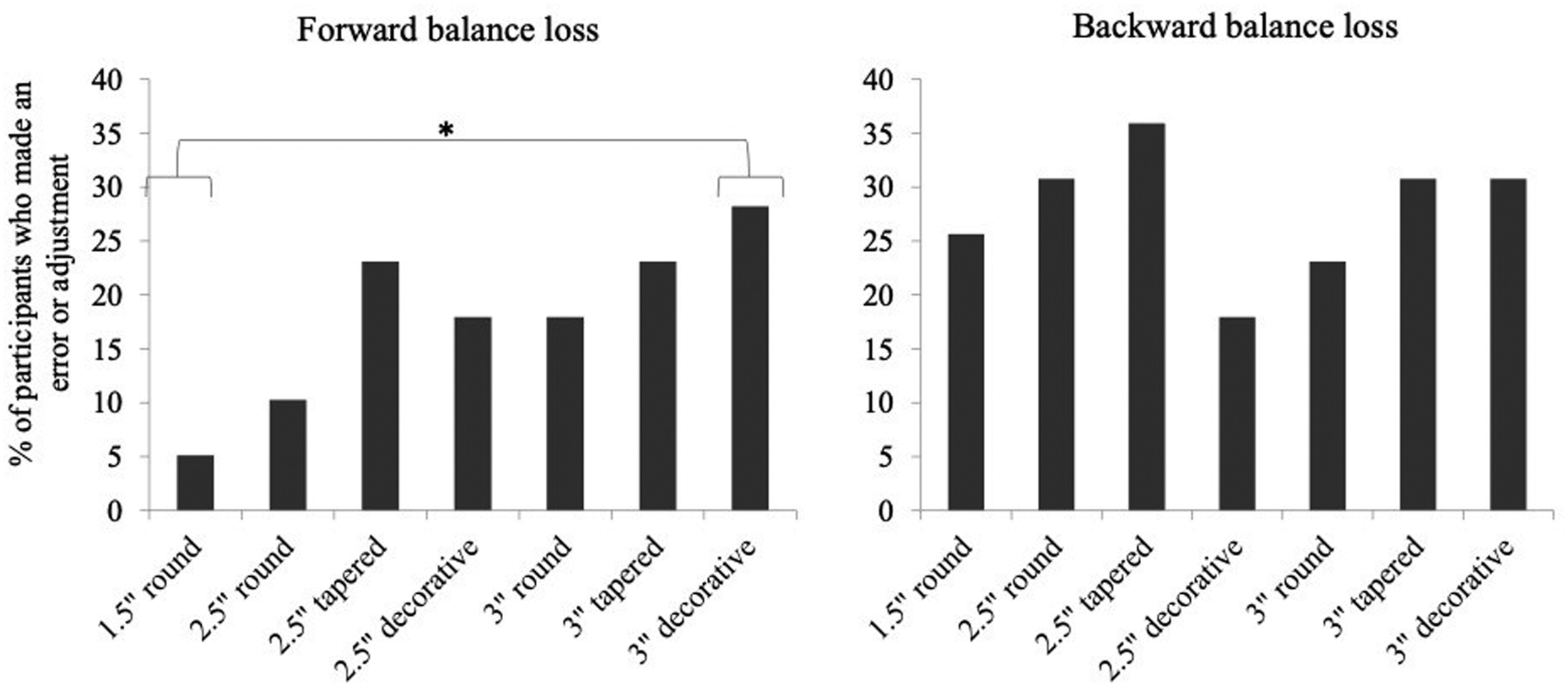
The most common errors in both forward and backward balance loss were lateral overshoots (7% of participants), small slides (5% of participants), delayed grasps (3% of participants) and adjustments (3% of participants). Rotations were also common in backward balance loss (7% of participants), but less common in forward balance loss (0.4% of participants). In terms of comfort, both younger and older adults rated the 1.5” round handrail to be the most comfortable, with approximately 80% of participants in both groups rating the handrail as comfortable or very comfortable. For the 2.5” round handrail, 74% of younger adults rated it as comfortable or very comfortable, compared to only 31% of older adults. For both the 3” round and the 3” tapered handrail, 44% of older adults rated the handrail as uncomfortable or very uncomfortable, compared to only 13% and 35%, respectively, for younger adults.
Discussion
Our research advances existing literature by providing the first evidence on the effect of handrail shape and size on the speed, timing and quality of reach-to-grasp balance recovery reactions. Given the importance of quick, accurate and effective grasping for balance recovery, our findings can inform evidence-based standards for handrail cross-sectional design.
Effect of Handrail Design on Speed and Quality of Reach-to-Grasp Reactions
While handrail cross-section did not substantially affect the timing of reach-to-grasp responses, cross-sectional design affected grasping quality. In general, smaller handrails had fewer errors in reaching and grasping, with errors being significantly less frequent with the 1.5” round compared to the 3” decorative handrail. Small handrails allowed more of the fingers to wrap around the underside of the handrail, either in a small or medium cylindrical grip or a full disk grip, which may have contributed to the reduced grasping errors. As these grip types allow an individual to pull the handrail towards the palm from the underside (i.e., “power grips”), they may permit the higher handrail forces observed in our earlier work (Gosine et al., 2021a) and in literature (Swanson, 1970; Young et al., 2009). In contrast, with the larger decorative and tapered handrail cross-sections, the handrail perimeter may have prevented effective grasping. This may have contributed to the larger number of errors in forward balance loss, particularly sliding and grip adjustments. The complex shape of these handrails may have also contributed to higher numbers of reaching errors. The geometry of these larger handrails necessitated a partial disk or parallel extension grip, as the fingers did not wrap around the underside of the handrail. Fixed hook grips were also frequent, suggesting that participants prioritized wrapping the fingers underneath the handrail by adducting their thumb. As grip type has been associated with ability to generate force, further analyses of the effect of grip types on errors in grasping and force generation in balance recovery are needed to understand the effect of handrail shape and size.
Increased reaching time after peak velocity allows a participant more time to modulate their grip before object contact in volitional reach-to-grasp (Berthier et al., 1996; Cicerale et al., 2014; Kudoh et al., 1997), which we expected could contribute to reduced errors in perturbation-evoked reach-to-grasp. We found that participants used a longer deceleration phase with the 1.5” round handrail compared to the other handrail cross-sections, without increased movement time. The increased deceleration phase may have allowed more time to adjust the hand to ensure correct contact with the handrail and reduced the need to adjust grip after contact; however, the deceleration time for the 1.5” round handrail was only 15 ms longer than the slowest handrail (the 3” tapered handrail). Therefore, other factors, such as the simple shape and the ability to use a power grip, likely contributed more heavily to the reduced errors with the 1.5” round design.
Regardless of the underlying factors, errors were less frequent with the 1.5” handrail. This likely helped with balance recovery, evidenced by how the highest MWP was observed with this cross-section. Both reaching and grasping errors may compromise balance recovery: reaching errors may delay grip completion, while grasping errors indicate that the handrail grip was inadequate. Building on this work, future studies should assess the relationship between errors and specific aspects of effective recovery (such as force generation or COM control) to gain a broader understanding of the effect of reaching and grasping errors on balance recovery.
Following backward balance loss, handrail cross-sectional design did not affect participants’ maximum withstood perturbation or percentage of errors. This differs from our forward balance loss findings. In backward balance loss, some participants leaned against the handrail with their elbow. The additional point of contact may have mitigated the effect of handrail cross-sectional geometry on balance recovery in this sample. Given that participants managed higher perturbations in backward balance loss despite grasping errors, our findings suggest that other factors, such as contact with the elbow or ability to generate forces, were more important for balance recovery in backward balance loss than speed and accuracy of grasping.
Comparison to Volitional Models of Reach-to-Grasp Movements
Our results highlight key differences between the control of compensatory versus volitional reach-to-grasp movements. First, participants in our study reached more quickly after the perturbation, with peak hand velocities nearly double those in volitional reach-to-grasp movements (McIntosh et al., 2018). Second, the timing of peak hand velocity in our study occurred much later in the reaching movement (75–85% of total movement time) than in volitional reaching studies (30–45% of total movement time) (Berthier et al., 1996; Cicerale et al., 2014; Kudoh et al., 1997). These findings are consistent with literature on the control of reaching circular handrails (Gage et al., 2007), and appear to apply to handrails with more complex geometry.
Importantly, we found no evidence that participants contacted the rail more slowly or prolonged the time spent decelerating when reaching to grasp complex handrail shapes. These often involved different grip types and more frequent errors and adjustments, even though participants tended to approach the handrail with an open hand irrespective of geometry (based on video review). Conversely, for volitional reaching, McIntosh et al. (2018) reported longer movement times and deceleration times when reaching to grasp wider objects (above 40 mm). Cicerale et al. (2014) reported longer deceleration phases when reaching to grasp objects with more complex geometry that required finer grasp control, especially in older adults. This modification permits more time to modulate the hand to ensure a successful grasp during volitional reaching. However, our data did not reveal age-related differences in the deceleration phase of compensatory reaching. The absence of common strategies to improve the accuracy of grasping larger and more complex handrail shapes (e.g., reaching more slowly, or prolonging deceleration time), combined with the high frequency of errors and adjustments after handrail contact with these complex shapes, suggests that both young and older adults prioritized reaching the handrail quickly to recover balance at the possible expense of the finer control of grasping.
Our finding that handrail cross-sectional design did not substantially affect the timing or speed of reach-to-grasp reactions can also be considered alongside our earlier investigation of handrail height (Komisar et al., 2019). While this work found no effect of handrail height on contact or movement time, participants’ peak hand velocity increased as handrail height (and the initial distance from the hand) increased, indicating that participants compensated for the greater hand-handrail distance by reaching more quickly to recover balance. Furthermore, deceleration time decreased as handrail height increased. Together, these results suggest that the gross handrail location may be more important than handrail geometry for driving the kinematics of rapid reaching, including the deceleration phase, during balance recovery reactions.
Limitations
We acknowledge several study limitations. First, while the perturbations in this study were not predictable, they were expected, which may have impacted both the speed and accuracy of the responses (Pater et al., 2015). The frequency of errors associated with each handrail cross-section may be under-reported as participants experienced several perturbations with each cross-section before their maximum withstood perturbation. Second, we induced balance loss during upright stance with the handrail stationary relative to the body, and participants were not allowed to step. This meant that the body positions and grasping kinematics differed from those in ongoing stair descent (Gosine et al., 2019, 2021b). Furthermore, lower limb movement has been associated with delays to upper limb response initiation (Quant et al., 2001). While handrail contact times in this study were slower than in unexpected backward balance loss during stair descent (Gosine et al., 2019), they were faster than in unexpected forward balance loss during stair descent (Gosine et al., 2021b). Future research should consider the speed and quality of grasping handrails of different cross-sections following an unexpected balance loss during gait, as would likely be the case in a real-world setting. Third, our study design and sample size estimates also focused on reach-to-grasp kinematics and were not designed to explore specific details of hand size as they relate to specific grip types. Preliminary results with grip type indicate that further research with a larger sample may be warranted to test the interacting effects of grip type, hand size, participant age, and reach-to-grasp quality. Fourth, video review revealed that participants often approached the handrail with an open hand irrespective of cross-section, but the low sample rate and video quality did not allow us to discern slight differences in the posture of the hand before rail contact, and whether this associated with grip type. Finally, we only tested healthy adults. Future work should explore the effect of handrail cross-sectional design on grasping responses in persons with conditions that impede grasping, such as hand osteoarthritis (Zhang et al., 2002).
Conclusions
We characterized the effect of handrail cross-section and age on the timing and quality of compensatory reach-to-grasp movements. Our findings showed little effect of handrail cross-section on the speed or overall timing of the reach-to-grasp reaction. However, handrail cross-section did affect the grip types used and the likelihood of making an error or adjustment in the response. The findings suggest that, following a challenging balance loss, both older and younger adults prioritized reaching the handrail, rather than modulating the movement time to allow more precision. These findings were consistent across age, with no notable differences in errors or adjustments for older adults despite slower peak reach-to-grasp velocities. This study provides novel insight into compensatory reach-to-grasp movements and the implications of handrail design and age on the speed and quality of reach-to-grasp reactions.
Footnotes
Acknowledgments
The authors would like to thank Dr. Bruce Haycock, Ms Susan Gorski, Mr Roger Montgomery and Mr Dan Smyth for their technical assistance and support on this project. Finally, the authors would like to thank Ms Mackenzie Collins for her support with data collection and coding.
funding
This work was supported by the Canadian Institutes of Health Research Operating Grant (CIHR MOP 142178), NSERC Canadian Graduate Scholarships-Doctoral Award (P Gosine), AGE-WELL Network of Centres of Excellence Postdoctoral Awards in Technology and Aging (V Komisar), and a Michael Smith Foundation for Health Research Postdoctoral Award (V Komisar).
Key Points
We explored the speed and quality of reactive grasping with varied handrail designs Older and younger adults grasped a handrail to recover from demanding balance loss Both age groups appeared to prioritize reaching the handrail over precise grasping Handrail cross-sectional design generally did not affect the timing of the movement Small round handrails resulted in fewer errors and greater withstood perturbations
Philippa Gosine completed her PhD in Biomedical Engineering at the University of Toronto and Toronto Rehabilitation Institute-UHN, Toronto, Ontario, Canada in 2021.
Vicki Komisar is an Assistant Professor of Mechanical Engineering with the School of Engineering at the University of British Columbia - Okanagan Campus. She completed her PhD in Biomedical Engineering from the University of Toronto and Toronto Rehabilitation Institute-UHN in 2018.
Alison C. Novak is a Scientist at KITE Research Institute, Toronto Rehabilitation Institute-UHN. She completed her PhD in Rehabilitation Science from Queen’s University, Kingston, Ontario, Canada in 2011.