
Abstract
This paper analyzes the contracting of maintenance services provided by an original equipment manufacturer (OEM) to an operator for a device. The service provider can exert different levels of maintenance effort during the course of the contract and the device's reliability (uptime) is influenced by these levels. However, the service provider's effort level is noncontractible. Our research seeks to find the optimal structures, as well as parameters, of performance‐based maintenance contracts. We single out a unique uptime‐guarantee contract structure that contains profit‐maximizing contracts in many situations. Complete servitization is the essence of such optimal contract structures. With this contract structure, the service provider simply guarantees 100% uptime and compensates the operator's for any occurred downtime at a higher unit rate than it charges for maintenance services. Our findings show that some of the well‐known performance‐based contract structures used in practice (e.g., pay‐for‐performance contracts) can be suboptimal for the OEMs. We incorporate the customer's ability to affect the uptime and show that the optimal contract structures can also coordinate the customer's effort. We demonstrate the advantages and limitations of offering menus of contracts to increase the service provider's expected profits. Finally, through simulations using a sample data set, we find that a contract designed using the key ideas in our paper shows very promising results for practitioners.
INTRODUCTION
Consider a setting in which an operator of some equipment (buyer) contracts with a service provider who agrees to service and maintain the equipment under certain contractual terms. Maintenance contracts can lower the risk of prolonged operational disruptions for the buyer. At the same time, they can generate revenue for service providers and offer excellent opportunities for
The interactions between a provider of maintenance services and an operator are often complex in nature. The availability of the operator's device in working condition, which is necessary for his/her revenue generation, is, to a large extent, dependent on the level of effort that the service provider exerts into maintaining it. The level of effort can manifest in several ways. The service provider, for example, can adhere to a schedule of preventive maintenance, keep a sufficient level of spare‐parts inventory, set up dedicated service centers, and invest in reactive capacity (manpower, and so on) to deal with disruptions and restore operations very quickly. However, typically, the operator cannot fully verify the service provider's intended effort level or understand its link to operational outcomes. Performance‐based contracts that tie the transfer of payments in the contract with the availability‐related key performance indicators (KPIs) of the device (such as uptime) can provide self‐enforcement mechanisms that elicit effort from the service provider.
In this paper, we focus on the class of uptime‐guarantee (UG) maintenance contracts. In this contract structure, for a transactional price the service provider promises an uptime level, that is, a minimum ratio of time that the device will be available over the total workable time during the contract period. If the actual uptime of the device falls short of the promised level, the service provider compensates the operator for the underperformance at a prenegotiated rate. While the promise of uptime conveys the OEM's confidence in device's reliability to the customer, the penalty clause in such contracts implies that the guaranteed uptime level does not have to actually materialize. The devices subject to contract in our context are mission critical, capital‐intensive, and highly reliable. UG contracts in these settings commonly proceed an initial warranty period wherein both parties have the chance of calibrating their perception of reliability, effort levels, and costs.
Take the example of
While UG contracts are ubiquitous, substantially different guaranteed uptime levels manifest themselves in practice. Table 1 illustrates some of the guaranteed uptime levels offered in practice. Although several companies implement UG contracts with guaranteed uptime levels that are very close, but not equal, to 100%, “OEMs that adopt machines as a service differentiate themselves from competitors by guaranteeing 100% uptime” (Sundblad, 2018). In fact, 100% uptime contracts are what the industry is referring to as servitization (Sundblad, 2018).
Some examples of guaranteed uptime levels offered in practice
The choice of 100% uptime in UG contracts gives rise to some specific performance‐based maintenance contracts in practice. The class of
In
The first goal of this paper is to determine the optimal maintenance contract structure from the perspective of the service provider. In investigating this problem, we seek to obtain some clarity on when each of the many options for maintenance contracts described above should be utilized. That is, what advantage one form may have over another and whether one structure dominates others. We formulate a mathematical problem for obtaining optimal contracts that maximize the service provider's revenue while taking into account the operator's decision regarding the purchase of the contract, as well as his/her anticipation of the service provider's effort level. Despite the possibility of ending up with multiple revenue‐equivalent contracts, we show that there is a unique contract structure that contains best single contracts in many relevant situations (even under asymmetric information). This unique contract structure guarantees 100% uptime, irrespective of the actual expected uptime of the device, and compensates the operator for his/her downtime at a unit rate that exceeds the unit rate charged for maintenance services (with a factor equal to the inverse of the device's expected downtime under no contract). This shows that complete servitization of maintenance operations is the best strategy for the service providers. Subsequently, any contract that guarantees an uptime less than 100% may fail to be optimal for the service provider in some situations. This means, for example, the pay‐for‐performance contracts implemented commonly in the aviation sector may result in the underperformance of the device and suboptimal profits for the service provider. We show that the optimal contract structure can also align the operators' incentives to exert their efforts in looking after the device.
The second goal of the paper is to find the optimal variables to include in a maintenance contract. We do this by first assuming that all information is symmetric. In this case, finding the optimal variables requires only the knowledge regarding the operator's revenue rate from the device. At optimality, the service provider must fully compensate the operator for any lost revenue due to downtime and should charge the operator a per‐unit‐time price equal to his/her revenue multiplied by the expected downtime under no contract. No other parameter (costs, effort‐related reliability, and so forth) are needed to obtain optimal contracts under symmetric information. Subsequently, we relax this assumption by incorporating the fact that the service provider does not know how much value the operator really places on uptime. In fact, the operators have strong incentives to conceal and/or underrepresent their valuations because, otherwise, the service provider can extract all of their surplus. In this case, we provide a closed‐form formula which obtains the optimal price and penalty rates. Although the moral hazard in the choice of service provider's effort level can be resolved with 100% UG contract, the asymmetry of information regarding operator's type could render single‐optimal contracts inferior to menus of contracts.
The final goal of the paper is to generalize the analysis to contract menus and show the advantages and limitations of using menus instead of single contracts. We find that while the service provider without economies of scale in maintenance costs can benefit from offering multiple contracts through a menu, contract menus in practice are less useful for service providers enjoying economies of scale in their maintenance operations, that is, for these providers, a single‐optimal contract has an expected profit that is as large as that of any contract menu.
We then use the main insights from this analysis to examine a real‐life setting in which a manufacturer of diagnostic imaging equipment contracts on maintenance terms with a health care system. We show, using their data and simulations, that implementing the class of contracts described above can improve the payoffs for both the service provider and the operator.
The rest of this paper is organized as follows. In Section 2, we review the relevant literature briefly. In Section 3, we formally introduce the basic model and discuss the centralized version of the problem. Section 4 focuses on UG contracts as a generic class of availability‐based maintenance contracts and analyzes the contracting game under the assumption of symmetric information. We formulate and solve the service provider's profit maximization problem and discuss the optimal choice of contract structure. Section 5 examines the setting with asymmetric information, that is, when the operator's valuation of revenue during uptime is unknown to the service provider. In Section 6, we expand the model to allow for contract menus. Section 7 tests the main findings of the paper through a numerical example. We then explore some extensions of the basic model in Section 8. In Section 8.1, we generalize the possible effort set of the service provider, and in Section 8.2, we incorporate the customer's effort in maintaining the device and check the robustness of the optimal contract structure in aligning operators' incentives. Section 9 applies our findings to the real‐life setting described above. Section 10 presents the main managerial insights and we end with concluding remarks in Section 11. All proofs are provided in the Supporting Information Appendix.
LITERATURE REVIEW
Decision problems involving both operators and service providers have been studied in the extant literature. Under the assumption of complete information, Murthy and Yeung (1995) investigate the optimal strategies for an operator as well as a service provider under two types of maintenance services: preplanned and immediate. They calculate the optimal contract prices based on the operator's known unit revenue rate. Murthy and Asgharizadeh (1999) and Asgharizadeh and Murthy (2000) study the optimal decisions of one or more equipment owners and a service provider in terms of the right choices of contract, contract prices, and service channels—also assuming complete information.
Unlike warranty contracts, which are indicative of the product reliability that is unknown to the operator, UG contracts are often seen in settings in which the operator has experience using the device. Rinsaka and Sandoh (2006) extend the work of Murthy and Asgharizadeh (1999) to include time after the initial warranty period. Within a multistage decision‐making framework, Hartman and Laksana (2009) examine the optimal strategies for equipment owners with regard to the types of extended warranty contracts as well as pricing policies. They show that by offering multiple contracts, a service provider can increase his/her profit dramatically. Tong et al. (2014) discuss the pricing strategies for a provider of two‐dimensional warranty contracts. Esmaeili et al. (2014) study the choices of various attributes in a three‐level warranty service contract among a manufacturer, a service provider and an operator. Gallego et al. (2014) analyze residual value extended warranty contracts, where an operator receives a bonus if no claims are made during the contract term. They study the pricing problem associated with a single contract and a menu of contracts for strategic operators with different risk attitudes. The contracts studied in this group of papers are not, however, performance based.
Another stream of research underlines the fact that interacting parties may not be fully aware of each other's attributes. Taking into account the random nature of an operator's attitude concerning risk, Huber and Spinler (2012) formulate a model that allows a service provider to manage his/her revenue by setting the prices for full‐service and on‐call maintenance contracts. They give a closed‐form formula for the service provider's optimal contract prices under the assumption that the operator's attitude toward risk is uniformly distributed. Another approach to managing the relationship between operators and service providers seeks to coordinate the parties' efforts to optimize the system‐wide profit—as opposed to focusing on either operators' or service providers' decision‐making problems. Within a deterministic framework, Tarakci et al. (2006a, 2006b) analyze several mechanisms, including a pricing scheme for maintenance contracts, to ensure that the optimal intervals for preventive maintenance from the perspectives of both service provider and equipment owner coincide. Tseng and Yeh (2013) extend the single processor case discussed in Tarakci et al. (2006a) for risk‐averse operators. Some authors draw upon demand elasticity to study the effects of different contracts on a service provider's profit. So and Song (1998) construct a model to address the pricing, delivery time guarantee, and capacity expansion decisions of a service provider. Lieckens et al. (2015) construct a multinomial logit model to approximate the operators' choice among full‐service, on‐call, or noract options. The reaction of the operator is not directly incorporated in these models.
In an alternative setting in which the operators design the maintenance contracts, Jain et al. (2013) study the double moral hazard problem between the operator (who designs the maintenance contract) and the service provider. There are two types of contracts investigated: in linear contracts, there is a uniform penalty applied for downtime; in tiered contracts, different penalty rates are applied for different levels of downtime. The authors examine the gap between the realized outcome under a given contract and that under the first‐best outcome. They assume convex increasing costs and that the operator's valuation is known. In UG contracts, however, it is the service provider who designs and offers the contracts so the problem from the point of view of the service provider is not analyzed here.
Kim et al. (2007) study an operator's maintenance outsourcing contract design problem with suppliers who provide repair and spare‐part services. The maintenance contract comprises a fixed fee, a ratio determining the operator's share of the service provider's repair costs, and a penalty for backorders incurred by the supplier. The supplier's decision regarding his/her inventory level is private action. The cost associated with the service provider's effort is common knowledge. They show the benefits of performance‐based contracts compared to cost‐plus and fixed‐price contracts when aligning the supplier's incentives. Kim et al. (2010) introduce contractual structures that mitigate the moral hazard service providers face that are associated with their capacity investments and highlight the challenges due to the infrequent nature of device failures. As in the case of our paper, they consider the case where the suppliers' effort is noncontractible. Zeng and Dror (2015) extend the analysis of this problem in several directions. Unlike our model, these models assume that operator's valuation, that is, revenue rate, is common knowledge. Moreover, the structure of the contracts is not investigated.
Bakshi et al. (2015) develop a game theoretic model to study the interactions between the service provider and operators in maintenance contracts. The service provider has private information about the reliability of the device—which is either high or low. The uptime of the device is tied directly to the amount of inventory kept by the service provider, which has a probability distribution function which satisfies the increasing hazard rate property. They study both resource‐based as well as performance‐based contracts. The resource‐based contract is characterized by a fixed fee and a ratio determining the service provider's share of the repair costs. The performance‐based contract is characterized by a fixed fee and a penalty rate for units of the device's downtime. The cost of the contract is associated with product availability as well as the level of inventory kept by the service provider. The authors study the signaling problem that arises between the parties. Assuming that the service provider knows the operator's valuation, they show that when the inventory levels are not verifiable, which resembles our case of noncontractible effort levels, the performance‐based contract puts more focus on reliability and overinvests in inventory. The initial reliability in our situation is known to both parties as our contracts usually follow the initial warranty period wherein the operator has the chance to experience firsthand the reliability of the device. In this paper, we relax the assumption that the service provider knows the operator's valuation and study the structures of the performance‐based contract that could achieve optimality in all situations.
Li et al. (2016) construct a model for a situation in which the operator is better informed about product reliability and the supplier offers performance‐based or transaction‐based maintenance contracts. Similar to the majority of the papers reviewed so far, this model assumes that the operator's valuation as well as the supplier's cost structure are common knowledge. They characterize the settings that result in the operator or the supplier preferring either of the contract types.
In an empirical study of maintenance service plans offered by a manufacturer of capital‐intensive medical imaging equipment, Chan et al. (2014) highlight the possible misalignment of incentives in full‐protection versus pay‐per‐service plans. The full‐protection plan includes the preventive maintenance services offered in a pay‐per‐service plan plus the charges for labor and material. As they report, suboptimal full‐protection plans may increase the costs of both manufacturer and operator, implying that the intended benefits of innovative maintenance contracts could not be achieved without fine‐tuning the parameters.
In a related paper, Hezarkhani (2017) incorporates the asymmetry of information regarding the operator's valuation to solve the revenue maximization problem for a service provider offering UG contracts. However, the corresponding model excludes the incentive issues between the contracting parties and assumes that the service provider's effort level is contactable, always delivered, and that the device's uptime is deterministic with regard to the effort. Thus, this work disregards the most important aspect of UG contracts, that is, the mechanisms that assure the operator about service provider effort after the purchase of contract. Our paper explicitly considers the possible incentive misalignment between the parties and the operator's adverse‐selection, due to private information, as well as the service provider's moral hazard, due to noncontractibility of maintenance effort. Still, we find that with the right choice of contract structure, the incentives can be aligned to the extent that the service provider can achieve the maximum revenue afforded by the optimal contract.
MODEL
The focal point of the problem is a device owned by an operator for which an OEM provides maintenance services. We assume both parties are risk‐neutral. We refer to the service provider and the operator with the pronouns he and she, respectively. The device's reliability is imperfect, and the ratio of the workable time that it will be available during a period of time, that is, its uptime 







For every unit of working time that the device is available, the operator can generate revenue. We denote the average revenue rate of the operator by 


The cost of maintenance services to the provider is represented with the function 




Benchmark: Centralized system
If the service provider exerts effort level 




It is useful to distinguish between two possibilities with regard to maintenance service situations. We say a situation Γ is of type I if 







Let For every type I situation, 










In 

DECENTRALIZED SYSTEM AND CONTRACTING OF MAINTENANCE SERVICES
In decentralized systems, the parties are self‐interested. The service provider offers the contract, exerts the maintenance effort, and incurs the associated costs. The revenue due to the availability of the device is obtained by the operator.
We construct a game played between the service provider and the operator to model the strategic interactions in the maintenance relationship. The sequence of events is depicted in Figure 1. In this game, the service provider's choice in offering a contract is followed by the operator's response in terms of purchasing the contract or rejecting it. Since the effort is not contractible, the service provider still can decide the extent of his maintenance effort after the contract is offered and purchased.

Sequence of events
Considering the moral hazard on the service provider's side when it comes to exerting his maintenance effort, the only way that the operator can be convinced of the service provider intention to exert effort is with a performance‐based contract that conditions the payments on the actual uptime of the device. Thus, we focus our attention on performance‐based contracts. In this context, a performance‐based contract can be specified by the payments from the operator to the service provider under any realized device's uptime at the end of contracting period.
Due to the risk‐neutrality of the parties, one can encapsulate the dynamics of a contract by transfer payments, which are calculated as the expected value of some function 



The expected profits of the operator and service provider under the contract 


The corresponding sequential contracting game is illustrated in Figure 2. There are three stages. In the first stage, the service provider offers the contract. In the second stage, the operator decides whether to purchase it or not. Finally, in the third stage, the service provider decides what his level of effort will be. We analyze the sequential contracting game using the concept of subgame perfect equilibrium (SPE) and backward induction.
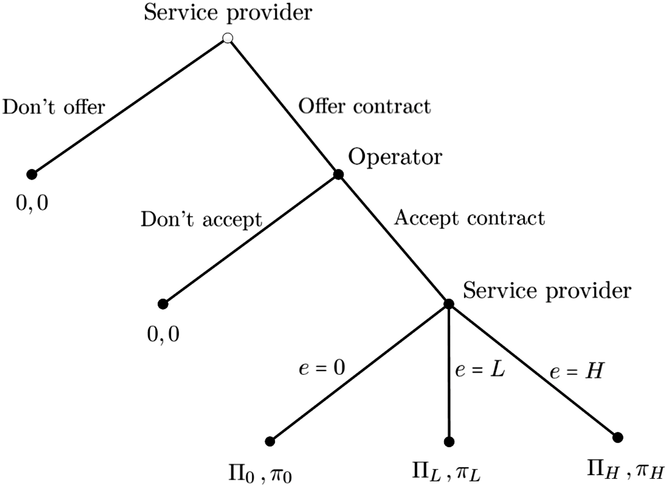
Contracting game tree
Given a contract 


In our setting, the induced effort level of a contract in the third stage can be inferred by the operator. Hence, in the second stage of the game the operator can make her decision regarding the acceptance of the contract under the associated induced effort level of the contract. Contract 
In the first stage, the service provider can determine if offering a contract which induces effort level 
Symmetric information
Assume that the operator types, manifested by her unit revenue rate 




Under symmetric information, a maintenance contract 



Uptime‐guarantee and related contract structures
In this paper, we focus on the class of UG maintenance contracts, which includes several well‐known performance‐based contract structures as special cases. As we show later in the paper, this choice is without loss of generality.
A UG contract is characterized by triplet 











4.2.1 100% UG (downtime compensation) contract
This contract structure can be represented with the triplet 



4.2.2 Pay‐for‐performance contract
This contract structure can be represented with the triplet 

Not all structures could implement the first best. In fact, well‐known structures such as pay‐for‐performance contracts may fail to implement the first best. To verify this, note that with the expected transfer 








Despite the plethora of possible contract structures, the main result of this section introduces a unique universally optimal contract under symmetric information. Under complete information, the contract 

Based on the above, the service provider can always maximize his expected profit using a UG contract so focusing on UG contracts in this context is without loss of generality. However, there is only one contract that can always be optimal. We next discuss the features of this optimal contract.
The universally optimal contract introduced in Proposition 1 guarantees 100% uptime. The problem with UG contracts that use any other uptime level is that one can always find situations in which the first‐best effort level of the service provider is 


Furthermore, in order to ensure that a UG contract can always satisfy the optimality conditions the unit penalty must coincide with the operator's valuation. If the first‐best effort level of the service provider is 







The universally optimal contract is equivalent to a downtime‐compensation contract structure. These contracts are the simplest to design and implement. The choice of 


ASYMMETRIC INFORMATION
As seen in the case with complete information, the optimal contracts draws upon the operator's valuation 


Under asymmetric information, the service provider cannot verify ex ante the participation of the operator. The service provider's problem to maximize his expected revenue, when offering a single contract, is
12





Note that although there can be many best single contracts—with different parameters—they all have equal expected profits. Thus, in the asymmetric valuation case, the degrees of freedom in choosing the three parameters of the contract discussed in the previous section exist as well. The main result in this section singles out a unique contract structure that always contains the best single contracts in the asymmetric information case. For every situation 


The first outcome of the above result is in line with the observation in the previous section that among all possible contract structures, a 100% uptime contract is versatile enough to contain best single contracts in asymmetric information case. Also, the contract structure found in Proposition 2 always contains the best single contract in asymmetric information case. The expected transfer payment of this contract structure under the choice of effort level 

In the contract structure introduced in Proposition 2, the ratio of price to penalty is the expected status quo downtime of the device. Hence, in order to achieve optimality, the service provider must set the penalty at a higher rate than the unit price—with a factor equal to the inverse of the status quo expected downtime. The ratio of penalty to price grows exponentially as the status quo uptime of the device increases. Subsequently, for high‐availability devices, the penalty rate in the optimal contract structure can be considerably larger than the price rate. In practice, the service provider charges the customer a lump sum equal to the unit price rate multiplied by the entire contracting period (say, a year), and then announces a penalty rate for downtime at much smaller unit of time (say, an hour). This is apparent in the excerpt from the US Cloud SLA example mentioned in the introduction, that is, 20% off of monthly subscription fee for each three hours of downtime per month. If expressed in terms of equal unit time rates, this penalty amounts to 50 times of transaction price (720 working hours per month for a data center). Within our optimal contract structure, this ratio of penalty to price corresponds to a device with status quo expected uptime of 98%.
In the asymmetric information case, the first‐best results may not be attained. The reason is twofold. First, it might be the case that the optimal contract deters a customer (with low valuation) from buying the contract even though in the symmetric information case there is an opportunity for generating value through a maintenance contract for that customer. This issue is the well‐known distortion from the bottom in mechanism design games (Laffont & Martimort, 2002). One can verify that with a contract For every situation 






Second, an optimal contract may not induce the first‐best optimal effort level. As we establish in the proof, the latter does not happen in 

In order to obtain a closed‐form solution for the optimal price, and subsequently, optimal expected transfer payment, we assume that the operator's type distribution The optimal transfer of a single contract under effort level 


The closed‐form solution in the last proposition resembles the optimal solution to the service provider's revenue maximization problem in Hezarkhani (2017) in absence of incentive problems. This, in conjunction with Proposition 2, highlights the power of our proposed contract structure to screen out any potential incentive misalignment among the parties and achieves the best possible outcomes for the service provider.
OPTIMAL CONTRACTS
In previous sections, we considered the scenario wherein the service provider offers a single contract to the operator. However, when the operator's type is unknown, the service provider might be able to increase his expected profit by offering a menu of contracts that can stratify the operator's type space and extract more profits in the case where the operator has a high valuation while still ensuring that a low‐valuation operator will purchase a contract. In this section, we address the optimal design of contract menus.
A contract menu The choice of the contract menu of size two 

The two contracts in the menu above must induce low and high effort levels. If optimal contract menus of the latter form exist, then they would be optimal among all other possible contract menus of any size as well. Subsequently, the service provider cannot accrue additional benefits from contract menus of size three or more.
In order to construct the optimization program corresponding to the aforementioned contract menu, we first need to analyze the acceptance regions for the single contracts included in it. A necessary condition for a contract menu of size two 

Let 










The main result of this section is contained in the following proposition. The following statements obtain the optimal contracts in different situations: For a situation For a situation



As revealed in Proposition 4, the type of situation has a critical effect on the optimality of single contracts versus menus. In 


NUMERICAL EXAMPLES
In this section, we elaborate on the results of previous sections via some numerical examples.
Consider the situation with 










Under asymmetric information, suppose the operator's revenue rate is distributed uniformly between 0 and 300. With uniform distribution, the equation for obtaining the optimal transfer payment of the contract that induces 

In this example, optimality cannot be attained using a pay‐for‐performance contract structure. In order to induce effort level 








Expected profits and induces effort levels in different contract structures (left:

Next, we examine the use of contract menus. As this is a type II situation, by Proposition 4, the use of contract menus can increase the service provider's expected profit. The optimal low effort inducing contract in this case is (1,14,40). The optimal high effort inducing contract in this case is (1,36,180). The contract menu consisting of these two contracts will generate the expected profit of 

EXTENSIONS
General effort sets
In our setting so far, the service provider can choose from a set of three distinct effort levels. We generalize this setting by allowing effort levels to take any value from the set Contract 








In order to generalize our results to the case of asymmetric information regarding the optimal contract structure to the situations with extended effort sets, we need additional conditions. These conditions are extensions of type I and II situations, that is, 










Under asymmetric information, the key result of the paper regarding optimal contract structures holds for type I and II situations under extended effort sets as well. With the general effort set, for every situation 


Note that the above results highlight the contract structure 

The challenge to extend our results to situations in 
Impact of customer's effort
In our models so far, the customer has had no impact on the uptime of the device. However, in most real‐life instances the customer, as the user of the device, can influence the uptime as well as the cost of maintenance. In this section, we include this important aspect into our analysis.
Suppose the customer can exert effort for proper utilization and taking care of the device. We denote the customer's effort with 






The expected profits to the customer and the vendor if the contract is offered, accepted and parties exert effort levels 
A preliminary observation in this case is that in the centralized mode, the first‐best effort level of the customer is to exert her maximum effort. In the first‐best solution for every situation 

This remark follows from the fact that expected uptime is nondecreasing and cost is nonincreasing on device user's effort level. For the service provider, the first‐best effort level depends, as before, on the relationship between the μ and A contract 


The definition of effort‐coordinated contract mandates that exerting high effort be a weakly dominant strategy for the customer in case she chooses to accept it. The appeal of effort‐coordinated contracts is that once they are in place, one can take the customer's utmost effort for granted and exclude it from the analysis of the problem. The main result of this section illustrates the coordinating ability of our optimal contracts. Every contract with the structure 
The above result clarifies yet another advantage of our suggested UG contract structures. That is, the threat of customer's malicious intent to hinder the performance of the device in order to take advantage of downtime penalties as an alternative source of revenue is irrelevant. Therefore, with this contract structure in place, any customer whose valuation for the device's uptime 
SIMULATION ON IMPLEMENTATION
We explore how our findings can be applied to a real‐life setting. To do so, we use data from a large supplier of equipment for diagnostic services to a large health care network that comprises public hospitals and private diagnostic centers. The setting is as follows. The supplier contracts with an entity that purchases medical‐imaging equipment (computed tomography [CT] and magnetic resonance imaging [MRI] machines). The contracts include a service provision that involves maintenance of the equipment and contingencies in the event of a breakdown or disruption due to equipment failure. To keep things simple, we consider only the two parties, the supplier (service provider) and the buyer (operator). In our setting, the above contracts govern 32 CT and 26 MRI machines that conducted approximately 600,000 scans for fiscal year 2017–2018.
Parameter estimation
We first consider the operator's parameters. The first task is to fit the values and distribution of
We next turn our attention to estimations of the reliability of the machines and the impact of efforts expended by the service provider. Typically, diagnostic imaging machines that are new purchases are very reliable at the outset of their operations. This reliability deteriorates after a few years. The following are typical issues, observed from our data, which caused equipment downtime: (i) chiller issues that affect the MRI but are separate from the MRI; (ii) recalibration due to power disruption; (iii) unclear images; and (iv) malfunctioning cold‐head on the scanner. These four reasons covered more than 95% of the significant downtime incidents. To compute the base rate of uptime, that is, μ0, we need to calibrate what effort actually looks like. Service providers offer contracts that provide various levels of preventative maintenance (PM). For example, a PM contract may check the heating, ventilation, and air conditioning (HVAC) unit and the chiller periodically. Another example features PM done on the cryocooler during nonoperating hours. Other examples of effort include positioning of spare coil loaner inventory, which is useful to keep the equipment running when a coil fails. We assume that μ0 is the uptime of a machine when there is no PM contract in place but rather only a standard maintenance contract that does not compensate for downtime. We note that μ0 varies by machine and age and location. Calculating 



Although we are interested only in the averages for the purpose of calibration, we also computed the distribution of time between failures, that is, the downtime distribution. We need this to compare our contracts, and will discuss this aspect in more detail later.
Evaluation of uptime contract
Now that we have all the parameters, albeit approximately, for our theoretical model, we explore a consistent approach to study the impact of what would have happened if the operators and service providers had used an “optimal” uptime contract rather than the status quo maintenance contract. Needless to say, the ideal scenario would have been to do a field study where we implemented the uptime contract and observed the effects in a carefully controlled experiment. Such an experiment, as can be imagined, is not trivial to accomplish. Instead, our approach was as follows. Using the parameters from our calibration, we searched for a contract of the form 
With the optimal values in hand, the optimal contract terms are as follows. In the event of a failure, the service provider will compensate the operator at the rate of 
These simulations provide greater confidence in our predictions and are summarized in Table 2, where the
Simulation results
As one would expect, for low values of
With a larger data set, it may be possible to calculate more precise improvements and contract terms based on the exact profile of the equipment. Our approach here is rather approximate, as we have grouped together a varied set of operators, equipment, and contracts. However, the above analysis does provide a glimpse of how benefits can accrue by moving to an optimal uptime contract.
DISCUSSION
We have shown that if UG contracts are designed appropriately, they can assure the operator about service provider's effort to increase the device's uptime. The crucial lever for assuring the operator of the service provider's effort is the penalty that the latter pays the former when the device fails to provide the promised uptime level. Our analysis of SPEs in this paper shows that the operator can always anticipate the service provider's optimal choice of effort level, which would be selected only after the contract is accepted.
An important factor in the analysis is whether the effort level of the service provider can be contracted. The possibility of formalizing the service provider's effort level within the contract makes it easier for the parties to speculate on their actions and make the best decisions. However, with noncontractible effort levels, which is consistent with most real‐life situations, new challenges surface. In this case, the lack of clarity on the service provider's effort level might render the purchase of a contract too fuzzy a decision for the operator. We showed, nevertheless, that, under certain conditions, appropriate contracts exist. The appropriate contracts not only must consider the profit‐maximizing criteria for the service provider but they should also signal the service provider's intention to exert effort clearly. With this clarity in place, the operator can make her purchasing decision with confidence. Such clarity can be achieved with a single UG contract structure that promises 100% uptime to the operator and reimburses downtimes at the rate equal to the contract payment inflated by the factor of 

Our analysis sheds light on some of the contracts implemented in practice and enables us to comment on their optimality. The first example is the UG contracts utilized by Philips Healthcare for servicing medical imaging devices such as MRI machines. The analysis reveals that the use of 100% UG contracts could be as good as any other uptime (e.g., 95% or 99%) that the company offers currently. In fact, it is the combination of the promised uptime level, price, and the penalty that determines the service provider's profit. In the case of Volvo Trucks, the Gold Service contracts have the optimal structure that we obtained in our analysis. However, when monitory payments to operators are employed, it is possible to encounter the problem that the operator's valuation may not be accurately known to the service provider. Still, when an alternative device (truck in this example) is offered to the operator, she can recoup almost all her entire lost revenue so the lack of knowledge about her type can be circumvented. The last example is the pay‐for‐performance service contracts used by Rolls‐Royce. We showed that the penalty rate in this contract structure might be too low and may not signal the higher effort levels of the operator, resulting in a suboptimal contract.
We conclude this section by discussing the subtle difference between performance‐based contracts that promise uptime versus availability. Although the UG contracts prove to be effective means to increase the availability of the device, the availability is not an appropriate KPI to be guaranteed.
To understand why this may be the case, we need to have a better understanding of workable and nonworkable times during the contracted period. As shown in Figure 4, the total time during the contracted period can be seen as workable or nonworkable. For example, normal business hours during weekdays are normal workable hours, and the rest can be considered as nonworkable hours. Although these “normal” workable/nonworkable hours can be foreseen in advance, the actual workable/nonworkable hours may be quite different. For example, suppose the device is down before an unforeseen event, such as a fire or a strike. Such unpredictable events turn normal workable hours into nonworkable hours and vice versa. In this case, the nonperational hours of the device would not be counted toward its promised uptime. However, changes in workable/nonworkable hours might be significant enough to make promises on availability detrimental to the service provider, who may end up paying huge penalties to the operator for reasons beyond his control or irrelevant to the device's reliability. The UG and availability guarantee would be the same if the total workable time during the contracted period could have been completely predictable by both service provider and operator. But this predictability would likely be an assumption that is hard to justify. In our model, it is only assumed that the expected workable time during the contract period is known and accepted by the parties. Nevertheless, the service provider must be able to verify downtimes as well as nonworkable times. Such verification is needed, as the service provider pays the operator whenever the machine is down during the workable time (no payments during nonworkable times). The discussion above reveals an advantage of pay‐for‐performance contracts. Since, in this contract structure, the service provider pays nothing to the operator during the nonworkable time and whenever the machine is down, the parties do not need to monitor or reach consensus regarding the nonworkable times. Therefore, disagreements concerning this value are irrelevant to the parties and have no bearing on payments and profits.

Workable and nonworkable times versus device's uptime (W, workable time; NW, nonworkable time; U, device is up; D, device is down)
FINAL REMARKS
In this paper, we study maintenance contracts that use uptime as their performance criterion. Broadly speaking, maintenance service contracts fall into two main categories: resource‐based contracts and performance‐based contracts. While the resource‐based contracts guarantee the supply of parts or a number of annual maintenance visits within a negotiated time frame, performance‐based contracts that tie directly to specific KPIs of the device under contract (e.g., availability, reliability, restoration time, and so on). We assume that the relationship between the required investments of the service provider and associated uptime distributions are common knowledge. The basis for this assumption is that the UG contracts usually proceed the standard warranty period so the operator has already been observing the device's performance and is somewhat clear about its reliability. This assumption is rather common in the literature (see, e.g., Bakshi et al., 2015; Kim et al., 2007; Li et al., 2016, among others).
Our stylized model has several limitations. This setting naturally begs the question of what the contract structure would look like if the service provider were to be risk‐averse. In this case, we hypothesize that the information set needed to arrive at an optimal contract would be richer than what we have shown. Examining general cost structures, assuming costs are private information and so forth are other natural extensions. These are left for future research.
Footnotes
ACKNOWLEDGMENTS
The authors are grateful to the associate editor and three anonymous referees for suggestions that substantially improved the paper. C. Tong was supported by the National Science Foundation of China (grants 72172104 and 72021002).
1
2
3
4
5
6
7
8
9
10
11
12
Given that the operator knows her type privately, this problem can be alternatively formulated using the standard adverse‐selection model, the service provider offers a screening contract (Bolton & Dewatripont, ![]() ) and maximizes his expected profit subject to the operator's incentive compatibility as well as his own individual rationality constraints—accompanied by the
) and maximizes his expected profit subject to the operator's incentive compatibility as well as his own individual rationality constraints—accompanied by the