
Abstract
Introduction:
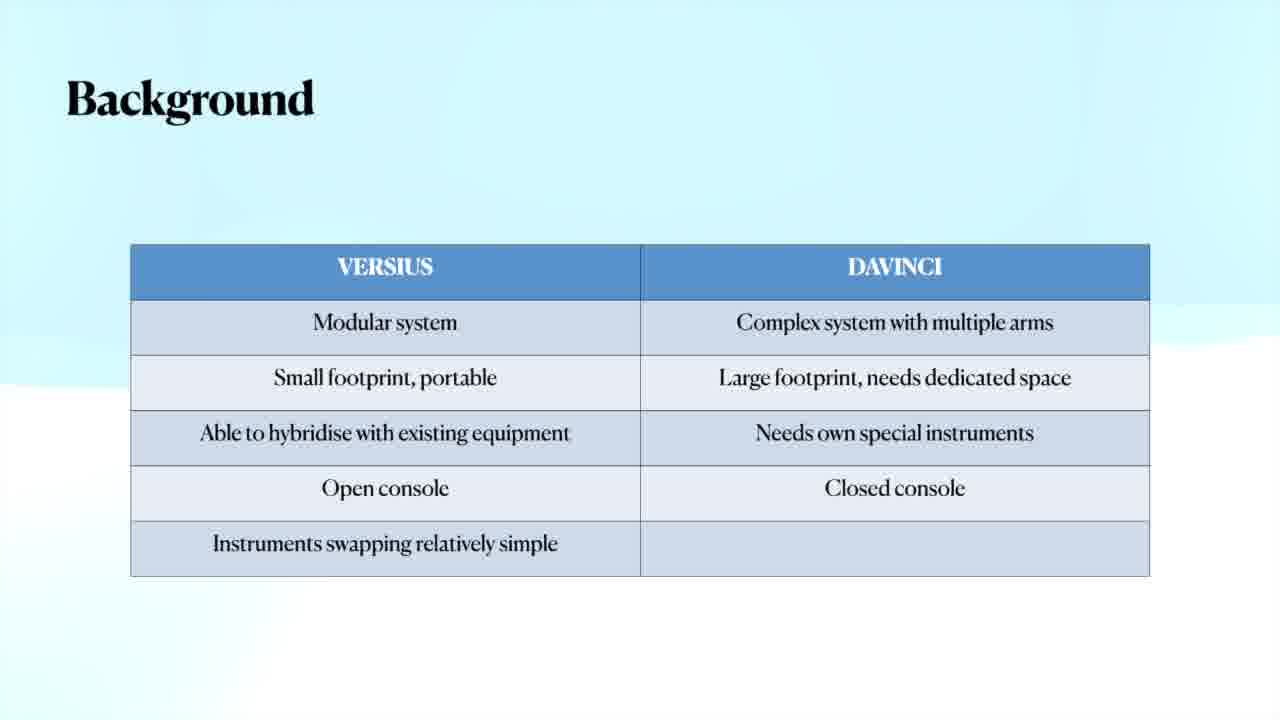
Robot-assisted hernia repairs provide equal clinical outcomes versus laparoscopic and open surgery. 1,2 The Versius system, developed by Cambridge Medical Robotics Surgical, first obtained European Conformity (CE) mark approval in March 2019 and was subsequently used initially in India and then the United Kingdom in the autumn of 2019. 3 The chief advantages include a lower cost that may play an important role in resource-poor countries. The Versius system provides an open console, is portable, and has flexible port placements. In addition, the Versius system may utilize existing laparoscopic equipment. This video documents the technique of the Versius system for robotic hernia repairs.
Materials and Methods:
Two robotic hernia repairs using the transabdominal preperitoneal repair technique were performed in male patients, age 27 and 45 years. Both the patients presented with lump in the groin associated with dull pain. Ultrasonography of the abdomen confirmed the diagnosis. Intraoperatively, a peritoneal flap was raised, and the dissection was carried out into the space of bogros and retzius. The sac was separated from cord structures and inverted into the peritoneal cavity. The pubic tubercle was observed and a 10 × 15 cm Prolene mesh was placed and covered the entire myopectineal orifice. The second patient had a direct hernia and the pseudosac was reduced and fixed with a tacker before mesh placement.
Results:
Both patients recovered without complications. Operatively, the procedure was slightly longer than usual. Similar results have been noted in a study performed on 32 patients using this system. 4
Conclusion:
Robotic hernia repairs are a feasible alternative for inguinal hernia repairs. Studies with larger cohorts are needed to assess and compare all robotic systems.
No competing financial interests exist.
Runtime of video: 7 mins 16 secs
Patient Consent:
The Authors have received and archived patient consent for video recording/publication in advance of video recording of procedure.


Get full access to this article
View all access options for this article.