
Abstract
Introduction:
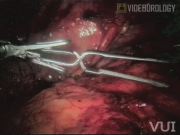
The need for a skilled assistant for hilar clamping has been considered a potential limitation of robot-assisted partial nephrectomy (RAPN). 1,2 In this video, which has a runtime of 5 minutes and 15 seconds, we describe our technique of application of robotic bulldog clamps for hilar clamping using two different types of clamps. Perioperative outcomes of the initial series of RAPN using robotic bulldog clamps are also compared with RAPN using laparoscopic bulldog clamps.
Materials and Methods:
A total of 25 patients underwent RAPN using robotic bulldog clamps designed for application with the robotic Prograsp instrument. Robotic bulldog clamps were introduced and removed through the assistant trocar. The perioperative characteristics of 25 consecutive patients who underwent RAPN using robotic bulldog clamps were compared with preceding 25 consecutive patients using standard laparoscopic bulldog clamps.
Results:
All 25 patients underwent hilar clamping during RAPN using robotic bulldog clamps with no intraoperative complications and without the need to readjust clamps or reclamp. Baseline tumor and patient characteristics were equivalent between the robotic and laparoscopic bulldog groups. Robotic bulldog clamps provided adequate ischemia during RAPN even for T1b tumors, hilar, endophytic, multiple tumors, and multiple renal arteries. The group with robotic bulldogs had perioperative outcomes at least comparable to the laparoscopic bulldog group, including console time (176 vs. 188 minutes, p = 0.16), warm ischemia time (19.6 vs. 22 minutes, p = 0.16), and EBL (75 vs. 150 mL, p = 0.10).
Conclusion:
Robotically applied bulldog clamps are a safe and feasible method of hilar occlusion during RAPN. These clamps allow the console surgeon to perform hilar clamping without the need for a skilled assistant and with comparable outcomes to standard laparoscopic bulldog clamps.
No competing financial interests exist.
Runtime of video: 5 mins 15 secs

Get full access to this article
View all access options for this article.