
Abstract
The articles associated with this Special Collection focus on the NASA BASALT (Biologic Analog Science Associated with Lava Terrains) Research Program, which aims at answering the question, “How do we support and enable scientific exploration during human Mars missions?” To answer this the BASALT team conducted scientific field studies under simulated Mars mission conditions to both broaden our understanding of the habitability potential of basalt-rich terrains on Mars and examine the effects of science on current Mars mission concepts of operations. This article provides an overview of the BASALT research project, from the science, to the operational concepts that were tested and developed, to the technical capabilities that supported all elements of the team's research. Further, this article introduces the 12 articles that are included in this Special Collection.
1. Introduction
Ahuman journey to Mars has long been imagined and immortalized in our collective cultural psyche by poets, writers, scientists, and technologists alike. Since the time of the Viking Missions, this momentous event has always been an elusive 30–35 years into the future; however, as this article goes to press, we find that a steep inflection in the rate of technological advancement is being met by a broad array of foundational space science and planetary research—a confluence that will optimistically serve to accelerate our path toward human exploration of Mars. Various architectures for a human journey to Mars (
In all of the mission architectures for Mars and deep space exploration, human safety will be of paramount consideration, and, as such, operational concepts and capabilities will be optimized in support of this priority as it was during humanity's last planetary excursion—the Apollo missions. However, the drive to discover and explore our Solar System will benefit from and ultimately demand the infusion of science into the operational framework and execution cadence of the mission. We contend that to enable the consideration and prioritization of science within future human planetary exploration, we must undertake this effort as a broader community and in earnest, such that from an early stage in the architecture development process we are designing the “How?” in such a way that supports both the well-being of astronauts and their ability to conduct meaningful, productive, and efficient scientific exploration.
One element of future mission design that will require rethinking with respect to the inclusion of scientific exploration as a mission priority is extravehicular activities (EVAs; defined as any space operation or activity performed outside the protective environment of a spacecraft and therefore requiring supplemental or independent life support equipment for the astronaut; McBarron and James, 1994, p.5). EVAs will be a primary mechanism for human scientific exploration within future missions; however, few EVAs dedicated to scientific exploration have ever been performed.
The quest for scientific discovery is an iterative and ceaseless process, as answers to research questions reveal more refined and sometimes unexpected research questions. In stark contrast, current EVA execution is highly scripted, and to date has been largely devoted to maintenance, installation, and construction of engineered hardware—for example, satellites and the International Space Station (Portree and Treviño, 1997)—and involves large contingents of ground-based support personnel (Miller
As a whole, scientific exploration and exploratory processes have served as a secondary objective on human spaceflight missions (Love and Bleacher, 2012). As we move human exploration into deep space, EVA designs will have to balance the need for operational flight rules, technologies, and overall mission architectures that enable flexibility for scientific exploration while also ensuring operational discipline that meets heritage standards.
Another critical consideration in designing for human scientific missions to Mars is the unavoidable communication latency that will occur between Mars and Earth, ranging from 4 to 22 min one-way light time (OWLT) (8–44 min round trip). Although the planetary sciences community is experienced at conducting robotic exploration missions over these latencies (
Finally, another significant constraint in future EVA operations is the bandwidth afforded by the eventual communications architecture that will impact the ability to share data products and other communications between space and ground during EVA. Unlike communication latency, the bandwidth of communications is a mission design parameter that can be increased through additional investment in space communications technology and infrastructure; however, although few would argue against increased communications bandwidth as a desirable capability, it must compete with many other required and desired capabilities for a finite budget. Guidance and insight are still needed to inform the difficult decisions on how to invest limited resources to achieve maximum likelihood of mission success.
So how do we begin the process of redesign toward addressing these fundamental mission considerations and infusing them with science priorities? One of NASA's approaches to fulfilling this infusion of science into human mission architecture development is through “Analog Missions”—Earth-bound missions that examine scientific, operational, and technical elements that are effectively analogous to conditions on other planetary and deep space environments (
The articles associated with this Special Collection focus on the NASA BASALT (Biologic Analog Science Associated with Lava Terrains) Research Program. BASALT focuses on integration—it is a science-driven mission conducted under Mars mission conditions—and the project exists to both broaden scientific knowledge regarding the habitability of basalt-rich terrains on Mars and move the pendulum from Earth-reliant to Earth-independent human exploration through the examination of the effects of science on current Mars mission concepts of operations (ConOps) and through the examination of these effects on the operational culture of current human spaceflight missions. Our science is anchored in the investigation of terrestrial volcanic terrains and their habitability as analog environments for early and present-day Mars, which necessitates the inclusion of field work at strategically selected locations on Earth. However, what distinguishes BASALT from typical terrestrial field programs is that our fieldwork is conducted under simulated Mars mission conditions. Specifically, BASALT's focus is on the iterative development and evaluation of capabilities and ConOps to enable efficient and effective cooperation between scientific explorers on Mars and support personnel on Earth, and it is focused on the more challenging problem of enabling meaningful scientific cooperation throughout execution (intra-EVA) rather than solely the periods between EVAs (
Human mission concepts that effectively mirror current robotic architectures or that invoke command-and-control hierarchies may result in mission concepts that limit science discourse between the Mars crew and the Earth-bound Mission Support Center (MSC) to inter-EVA periods. Although inter-EVA space-ground communication will be of significant value to both science and operations, an inability to communicate intra-EVA would mean that Earth-based inputs would be limited to strategic communications, leaving tactical decisions entirely to the crew. The crew will undoubtedly be well trained in future missions; however, it is unlikely that they will be the subject area experts (SAEs) in the multitude of scientific fields planned for future missions; the true SAEs will be located on the Earth in MSCs. In addition, these scientific disciplines will likely require a breadth of science teams, all competing for their scientific objectives to be prioritized and satisfied. The management and organization of these scientific teams will need careful thought and consideration, especially when we deal with human-scale operations. Even with communications latency, and perhaps even because of that latency, the pace of scientific EVA operations will be much greater than ever before. Thus, it is critical to evaluate the viability of intra-EVA communications ConOps that allow SAEs to influence scientific and exploration decision making on Mars.
Many questions remain as to whether these intra-EVA communications can be conducted under Mars–Earth latency conditions, and whether they are enabling and enhancing to the science return. If SAEs are to be leveraged in scientific exploration, they must be supported to achieve the highest possible scientific input. A primary challenge in enabling meaningful and efficient space-to-ground cooperation during EVAs is to figure out how to ensure that the Earth-based SAEs are provided adequate time to receive, view, assimilate, and act on data that are collected during an EVA while minimizing or eliminating the need for EV crewmembers to retrace their steps or stand idle while waiting for the resulting recommendations to reach them. Such is the challenge that the BASALT program undertook.
2. BASALT Work Environments
To create the BASALT research “stage” within which we could address said challenges, we had to build a truly interdisciplinary environment that enabled the BASALT team to merge scientific, operational, and technical research objectives. This necessitated a team who willingly explored a variety of solutions, many outside their traditional intellectual comfort zones, to ensure that all aspects of the research program were given their due attention to meet stated objectives. This BASALT team divided their time between two high-level work environments: (1) In-Field and (2) Out-of-Field (X-Field). In-Field and X-Field activities comprise ∼9% and 91% of our team's annual efforts, respectively. Although the In-Field component of the program typically takes center stage given the intensive travel, logistics and outreach activity associated with fieldwork, it is important to note that the bulk of the research, planning and development efforts occur outside (X-Field) of this more visible snapshot of our program.
The In-Field activities have included (1) three BASALT field deployments lasting 3 weeks (inclusive of set-up and de-mobilization periods, and a nominal 10-day mission simulation), along with (2) a number of smaller reconnaissance, engineering, and operational readiness tests that in some cases took a portion of the team into field settings. In the case of the longer (3 weeks) In-Field deployments, these took place in the Eastern Snake River Plain (ESRP) Craters of the Moon National Monument and Preserve (COTM), Idaho, from June 13 to July 1, 2016 (BASALT-1), Hawai‘i Volcanoes National Park, Mauna Ulu Region, Hawai‘i, from November 1 to 18, 2016 (BASALT-2), and Hawai‘i Volcanoes National Park, Kilauea Iki and Kilauea Caldera Regions, Hawai‘i, from November 2 to 19, 2017 (BASALT-3) (Fig. 1).
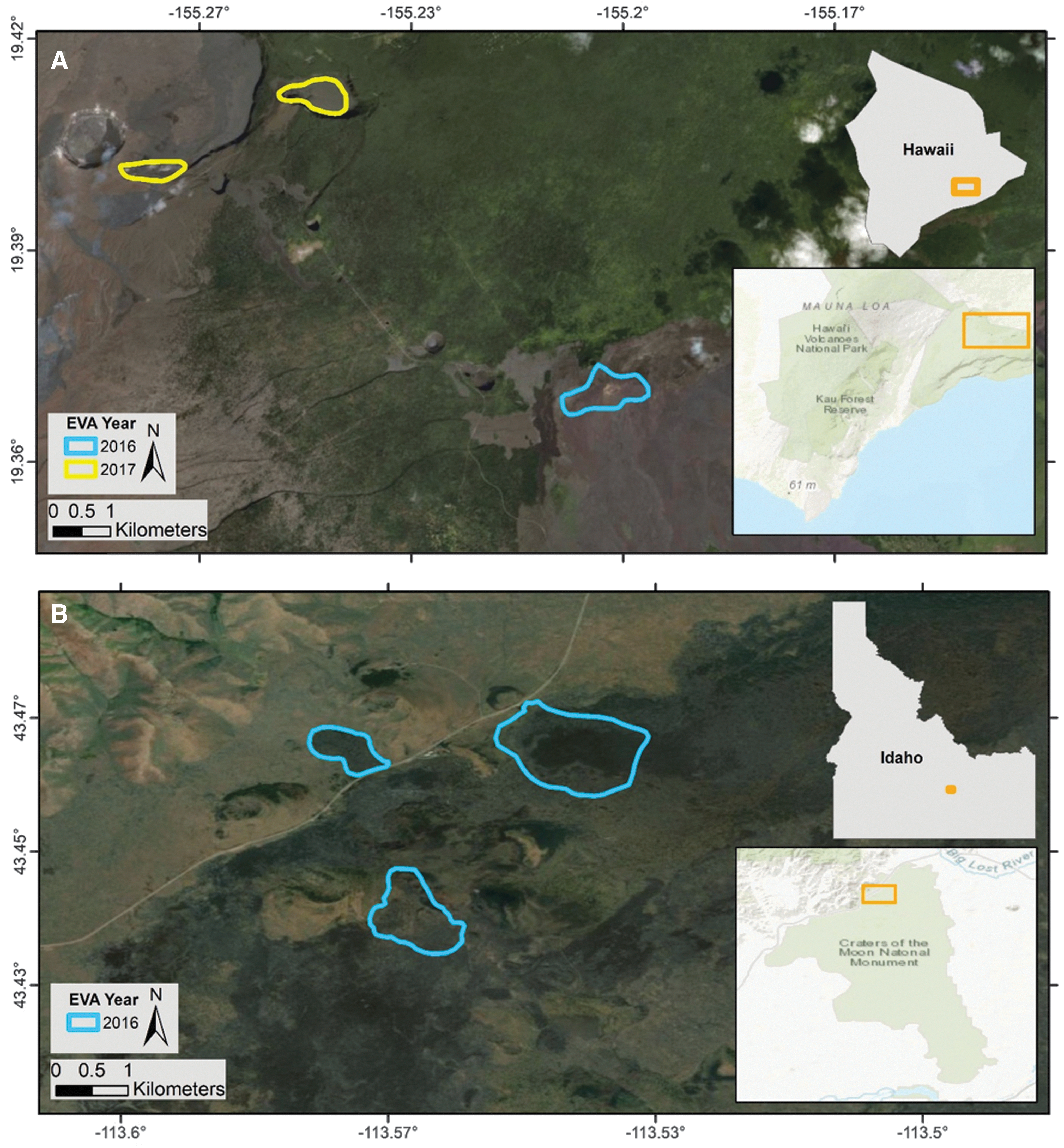
The BASALT team selected these field sites given their representation of specific paleo- and present-day states on Mars and to address the team's broader science question: How do microbial communities and habitability correlate with the physical and geochemical characteristics of chemically altered basalt environments? These terrestrial basalt environments were targeted as Mars analogs to investigate whether particular geochemical and petrological conditions could provide appropriate energy sources, major biogenic elements (CHNOPS), liquid water, and micro-habitats for microbial growth. Further, we investigated the presence of organisms using redox couples shown to exist on Mars and that have been proposed as the basis of potential chemolithotrophic ecosystems (Grotzinger
The complementary nature of the Idaho and Hawai‘i basalt environments provided an opportunity to conduct field research that would enable the BASALT science team to directly address questions 1A, 1B, and 2A–2C presented in Table 1. Specifically, the COTM in Idaho, and volcanic flows along the East Rift Zone (ERZ) on the Big Island of Hawai‘i were selected to represent, respectively: (1) recent Mars (when basaltic volcanism was infrequent and most evidence for volcano-driven hydrothermal activity is relict), and (2) early Mars (particularly Hesperian, when basaltic volcanism and interaction with water were widespread).
Biologic Analog Science Associated with Lava Terrains Research Matrix
ConOps = concepts of operations; OWLT = one-way light time.
The scientific rationale for these studies stems from the hypothesis that widespread basaltic volcanism occurred on Mars through the early Hesperian, with lesser, more localized volcanism through the Amazonian period. The underlying hypothesis here is that these volcanic environments could have led to the creation of habitable environments (Werner, 2009). There is compelling evidence in orbital imagery and spectral data for the interaction between basaltic volcanism and ground ice and water over a wide range of physical scales (Squyres
However, the question remains as to whether these hydrothermal environments on Mars were habitable. Perhaps the most fundamental factor relevant to the physical and chemical characteristics of microenvironments, and therefore their habitability, is the interaction of substrates and volatiles. The COTM and ERZ flows present complementary basalt environments affected by liquid water, intrinsic volatiles, and fumarolic gases with a range of alteration products. COTM has a geologically young basaltic terrain (eight eruptive episodes between ∼15,000 and 2000 years before present) that provides targets to observe a myriad of alteration states of basalt (including volatile interaction and subsequent weathering), and it is geologically analogous to the low-shield fields and lava plains on Mars (Greeley, 1977, 1982). Our field targets within ESRP are relatively young, chemically diverse basaltic lava flows erupted from fissures and low shields (Kuntz
BASALT In-Field science was accomplished through geological and biological sampling and
To create a “flight-like” In-field test environment, the BASALT team examined analytical assessments and lessons learned from previous NASA trade studies and analog missions, and from there chose to adopt a Mars mission architecture that simulated a crew of four colocated on Mars in the roles of extravehicular (EV) and intravehicular (IV) personnel, and an MSC on Earth that comprised science (termed Science Support Team or SST) and capabilities support personnel. Table 2 provides a list and a brief description of each role within the adopted mission architecture, whereas Figure 2 outlines the baseline In-Field architecture associated with our BASALT 1–3 deployments. All of these details are expanded on throughout this Special Collection.
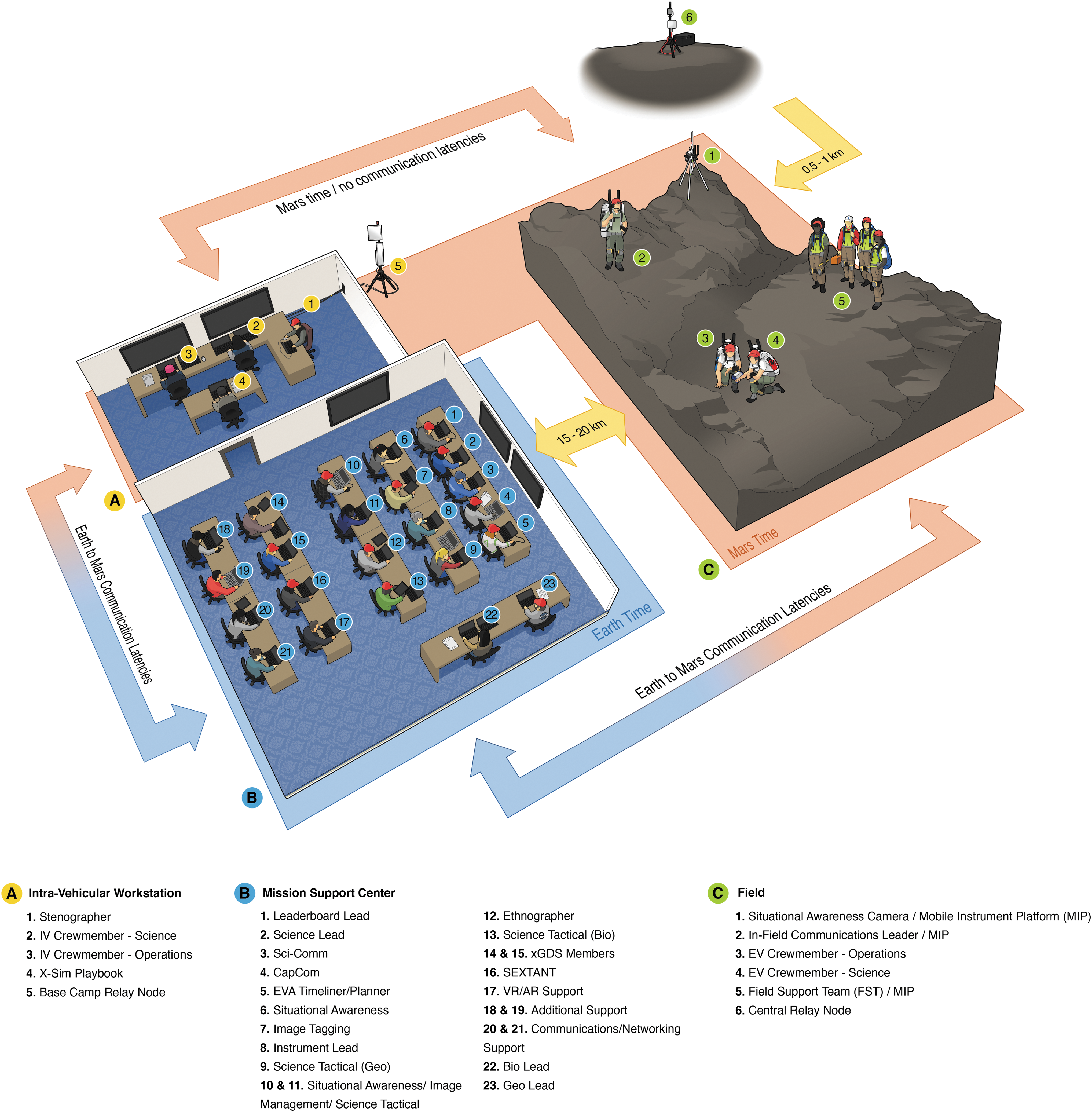
BASALT In-Field Mission Architecture for BASALT-2 and BASALT-3 deployments to Hawai‘i. The IV and MSC teams were located in the Lehua Room conference facilities at the Kilauea Military Camp; however, these teams were physically separated by a closed door during the In-Sim activities given that the IV crewmembers were on “Mars time” with the EV crewmembers, whereas the MSC was on “Earth time.” The Sci-Comm and CapCom personnel who were situated in the MSC lead all communications with the IV team members over simulated Mars latency conditions. The IV workstation included laptop computers, tablets, and additional wall-mounted display screens for each IV crewmember. Audio headsets with push-to-talk capabilities were used for voice communication. The MSC consisted of three rows of tables to accommodate individual laptops for all MSC members; two additional display screens were used at the front of the MSC room to project timeline, video imagery, and telemetry data; one additional screen on the far left wall projected dynamically updating leaderboard data to the entire SST. Network connectivity from the EVIBs and mobile SA camera to the IV workstation and MSC was enabled through the use of fixed antennae and mobile repeaters located between the field sites and the MSC. The BASALT-1 deployment to Idaho followed a similar set-up, with the major variant being that in Idaho an MMCC (trailer) was used to house the MSC and IV teams. BASALT, Biologic Analog Science Associated with Lava Terrains; EV, extravehicular; EVIB, extravehicular informatics backpack; IV, intravehicular; MMCC, Mobile Mission Command Center; MSC, Mission Support Center; SA, situational awareness; SST, Science Support Team; VR/AR, virtual reality/augmented reality; xGDS, Exploration Ground Data Systems.
BASALT In-Sim Key Roles and Functions
EV = extravehicular; EVA = extravehicular activity; IV = intravehicular; MSC = Mission Support Center; SAEs = subject area experts; SST = Science Support Team.
As shown in Figures 2 and 3, both In-Sim and X-Sim elements were required to support each EVA. X-Sim elements were used where the objectives of the test did not require that those functions be performed In-Sim. For example, because surface mobility systems were not being evaluated, the transportation and positioning of various supporting field assets such as communications relay stations and sampling equipment were performed by X-Sim personnel, which included a Field Support Team (FST) and others in the role of Communications Lead and Relay Support (Fig. 2), where in reality it would most likely be transported on a motorized chassis, also known as an MIP (Mobile Instrument Platform). MIPs have been conceptualized as a vehicle that could range from a small unmanned robot to a large pressurized or unpressurized human-rated vehicle but which, in all cases, consists of a mobility system combined with a minimum set of capabilities that are relevant to science and science operations.
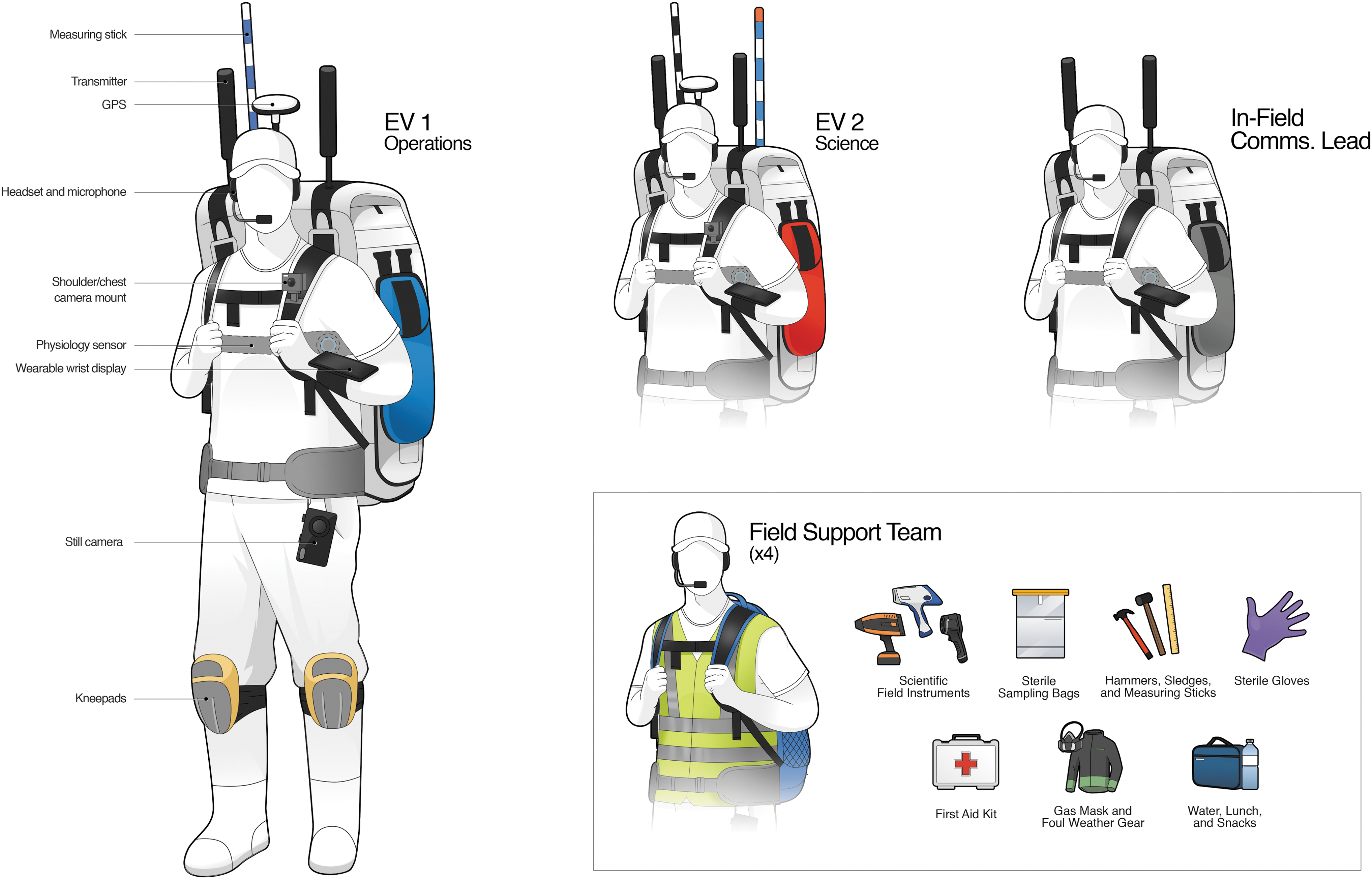
In-Sim and X-Sim EVA Personnel. EV-1 Operations wore an EVIB color-coded with blue pockets, whereas EV-2 Science wore an EVIB color-coded with red pockets. Both EV crewmembers had similar gear though their roles were focused on specific tasks that were more operationally or scientifically oriented. The Communications Lead oversaw all network and communications elements in the field, and they wore an EVIB color-coded with silver pockets. The Communications Lead's EVIB acted as an important network relay node during EVAs. Four to five FST members assisted with each EVA, though in an X-Sim capability. They acted as MIPs for the EV crewmembers and played a key role in managing handheld instruments, sterile sampling tools, safety equipment, and food/water for the entire field team, including the EV crewmembers. FST, Field Support Team; MIP, Mobile Instrument Platform.
All EVAs were conducted under simulated Mars mission (
During each of the BASALT field deployments (BASALT 1–3), there were 10 mission days, with daily 4 h science-driven EVAs. Each EVA involved the entire MSC and a rotating roster in the roles of EV crewmembers and IV crewmembers. The EV- and IV-crewmember rotations were structured such that each pairing would be exposed to the varying In-Sim test conditions twice or more, but to an equal number; further, the rotations enabled crewmember rest days and the ability for them to participate in the MSC.
During each EVA, there were two In-Sim EV crewmembers, one situational awareness camera, and five to six X-Sim personnel in communications and FST (Figs. 2 and 3). Each EV crewmember and one additional X-Sim communications support person wore an extravehicular informatics backpack (EVIB), which was designed in support of our science and operations research requirements to represent an element of the (In-Sim) MIP capability. The EVIBs performed as critical data capture, conversion, and relay nodes within the BASALT In-Field network architecture (Figs. 3
–5). Similar EVA backpacks were utilized during the NASA Desert Research and Technology Studies field tests (Abercromby
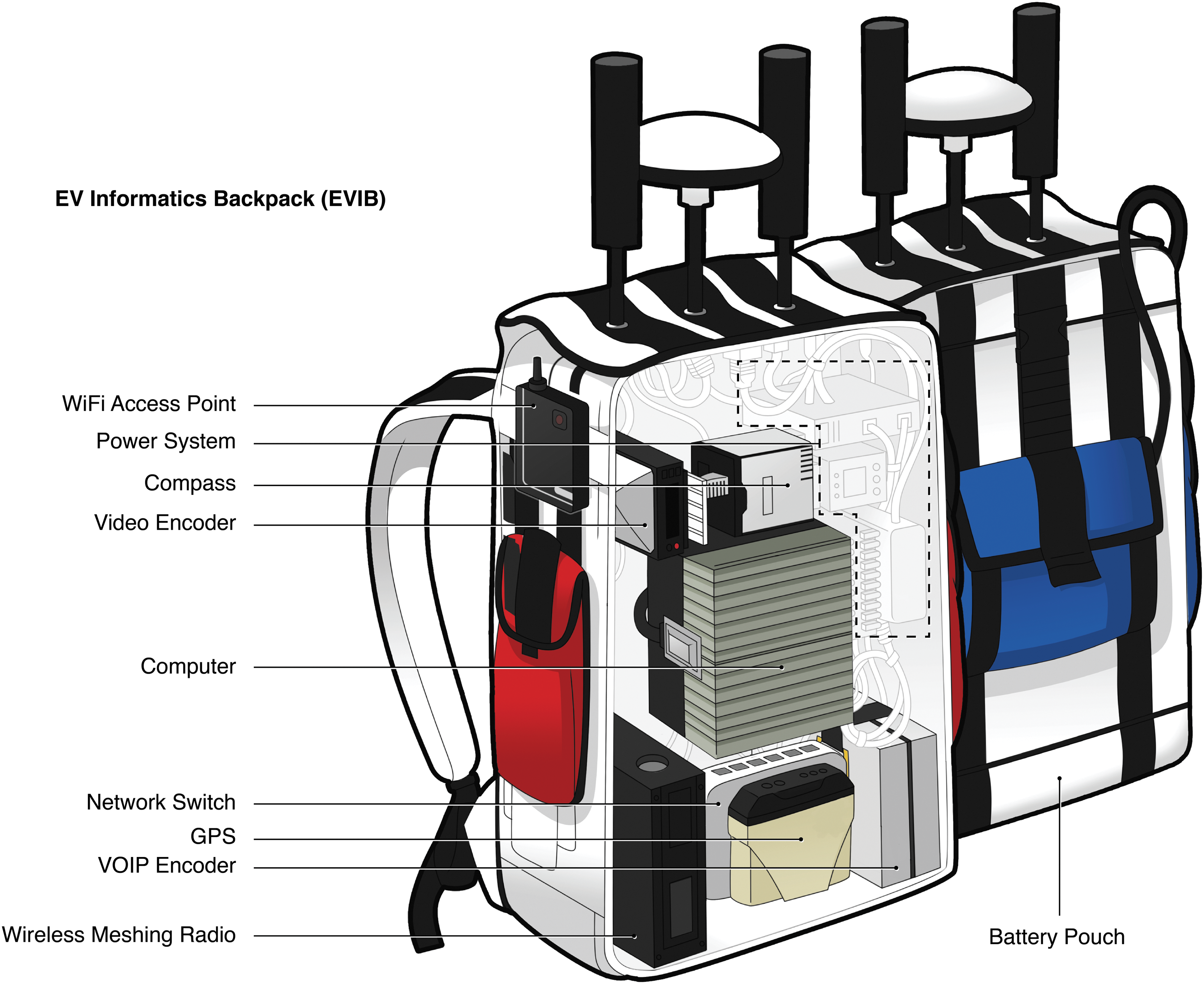
Internal hardware elements of EVIBs.
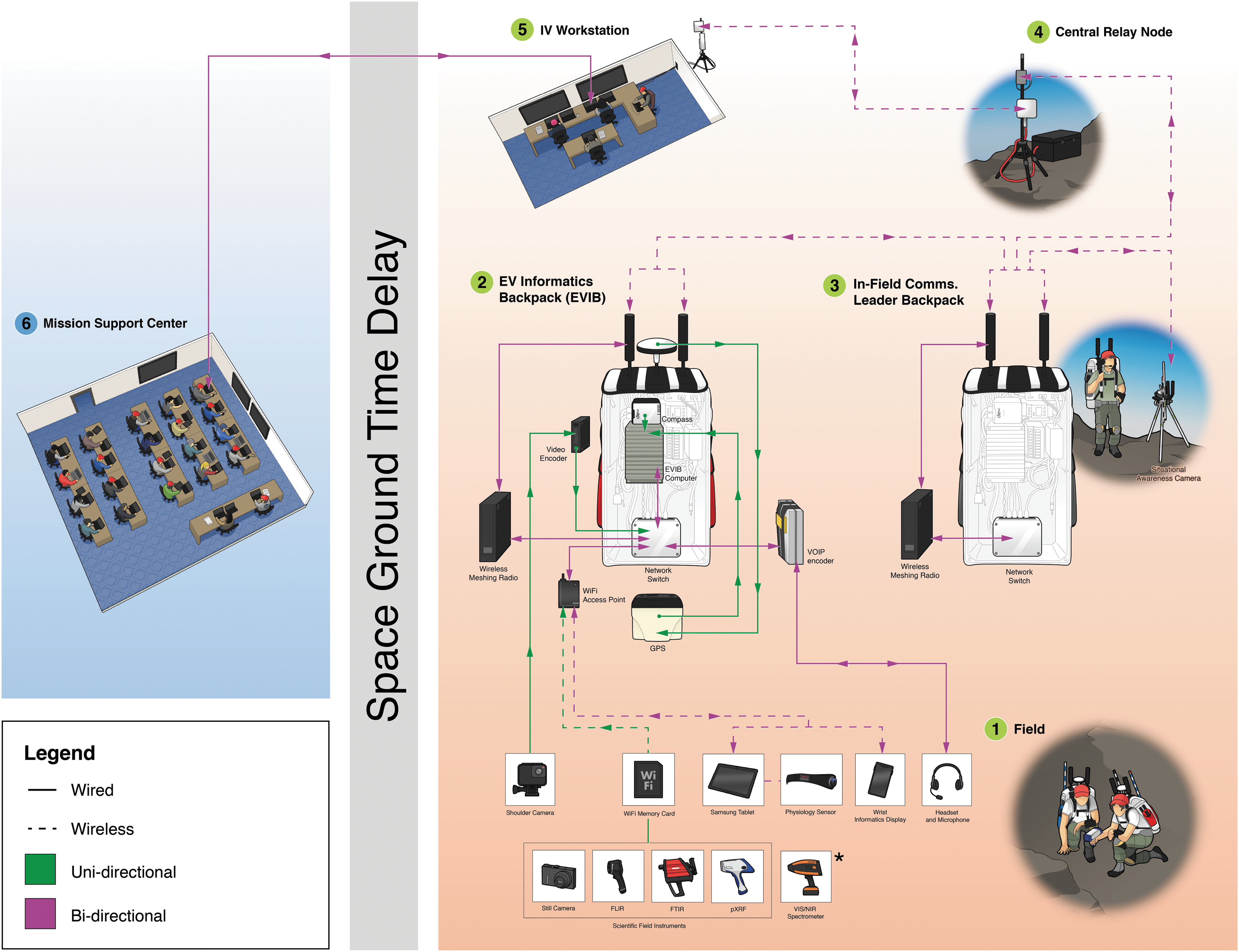
BASALT In-Field communications architecture. Fuchsia arrows represent full-duplex (two-way) data transmission, while green arrows represent unidirectional/one-way data transmission flows. Voice communications were transmitted and received by using a Voice over Internet Protocol (VoIP) system that converted analog audio from the EV crewmember headsets to digital audio for transmission over the network. Digital video from the chest cameras was transcoded in real time by a Teradek Cube encoder into a format that was suitable for streaming over the field network. Data from the still cameras and science instruments were sent via a WiFi SD card to the EVIB computer, where they were buffered in case of network dropouts and then forwarded over the network to servers in the IV Room and MSC. Similarly, GPS and compass data were collected by the EVIB computer and converted to a format that was suitable for sending over the field network by using the open-source gps2udp software package. *During In-Sim activities, the VIS/NIR spectrometer data was sent from the field to the MSC by capturing a still photo of the display screen output and sending the image via WiFi SD onwards per earlier description.
As shown in Figure 3, the EVIBs were color-coded to represent the EV operations lead (Blue), EV science lead (Red), and X-Sim Comms lead (Grey). The soft shell of the EVIBs was constructed from multiple types of high-tech Dyneema fabric, and it was custom designed and manufactured by Mission Workshop San Francisco in collaboration with the BASALT team. The custom elements included ports for hardware connectors associated with our communications network, a zippered compartment for rapid battery swaps, mounts for the EV video camera, and rain covers to protect sensitive equipment during frequent rain events in the field. The FST wore standard 50–80 L backpacks that carried biological and geological sampling equipment, various portable handheld scientific instruments, safety equipment, foul weather gear, and water and food for the field team (Fig. 3). As the EVA progressed, the FST handed off and retrieved equipment from the EV crew, thereby simulating one of the intended functions of a MIP, which in our application was a scientific EVA tool and sample stowage capability. Among many essential tasks, the FST was also responsible for managing and storing all field samples, and for transporting them out of the field and back to the BASALT basecamps. The EV crew members were heavily loaded with both equipment (
Another key role of the EVIBs was to house various hardware components that enabled data products (
The BASALT SST, which comprised junior and senior research contributors, was a core component of the MSC. The MSC also included X-Sim personnel in various technical, logistics, and management roles (Table 2; Figs. 2 and 3). During BASALT-1, the MSC was located within the NASA Mobile Mission Command Center (MMCC) trailer (Lim
3. BASALT Special Collection Compendium
The BASALT research program relied on the scientific, operational, and technical elements previously described to function as an integrated whole during each of the In-Field deployments. The articles within this Special Collection represent a portion of the BASALT program's research output, and they delve into the results and details associated primarily with the BASALT-1 and BASALT-2 deployments. Some of the articles include analysis and discussion from BASALT-3, with additional results from that deployment presented in forthcoming publications.
Hughes
Next, Cockell
The Collection then transitions to a focus on Science Operations. Beaton
Building on Beaton
Brady
Stevens
Payler
Sehlke
Kobs Nawotniak
Marquez
Finally, the Special Collection is rounded out by two complementary articles (Seibert
4. Final Remarks
The articles in this Special Collection provide an academic look at the process of developing mission architectures for future human spaceflight, and they highlight our team's ongoing effort to create mission designs that optimize for the humans and their inherent capacity for exploration within the endeavor of human spaceflight. Achievement of this goal will require a continued and persistent push to find the operational “devil in the details”; to flush out the right questions that will lead to designs suited for the unprecedented mission demands that will come with having humans explore Mars and other deep space environments; and perhaps, most importantly, to provide a framework within which scientific exploration will have the ability to ebb, flow, and be dynamically driven both by the environment that we are exploring and by those who are exploring it first hand and millions of kilometers away.
The Apollo missions were not tasked with science as a priority, and in fact there was worry and debate within the scientific community of the time that there would be deleterious effects on space science research as a whole as a result of the budgetary and programmatic demands of the Manned Space Flight program (Compton, 1989). However, as the Apollo missions came to an end in December 1972, there was a synergy that had developed between the engineering, operations, and lunar science communities that was undeniably productive as a collective and within each of these disciplines. Recommendations were put forward by the scientific community in 1965 (NASA SP-88) detailing scientific priorities, crew selection, and training, supporting capabilities such as lunar aerial vehicles and long-range pressurized vehicles. Many of these recommendations were ultimately adopted in support of science during the Apollo missions; many of these recommendations remain topical today as we design for Mars. Fundamentally, the dialogue was productive for the Apollo missions, for its science output, and to space exploration as it continues today. As Compton (1989) remarks in his historical overview of the Apollo Lunar Exploration Missions, “No one lamented more strongly than the scientists—the cancellation in 1970 of three planned lunar exploration missions.” Healthy debates continue as we work to find a path forward to human exploration on Mars; however, it is without a doubt that the effort will best be served by the integration of science requirements early on, in the engineering and operational development process.
The selection of
Footnotes
Acknowledgments
The authors are grateful for the NASA Planetary Science and Technology Through Analog Research (PSTAR) Program (NNH14ZDA001N-PSTAR) grant (14-PSTAR14_2-0007) to D.S.S.L., with additional support from NASA SSERVI FINESSE grant to J.L.H. They are also grateful to the staff and leadership of the Craters of the Moon (COTM) National Monument and Preserve (Idaho), Hawai‘i Volcanoes National Park (Hawai‘i), USGS Hawai‘i Volcanoes Observatory (HVO), Kilauea Military Camp (Hawai‘i), and City Council of Arco, Idaho. This work was made possible through the following permits and approvals: COTM National Monument and Preserve (Permit No. CRMO-2014-SCI-0004), Hawai‘i Volcanoes National Park (Permit No. HAVO-2016-SCI-0023), and NASA Johnson Space Center Institutional Review Board (IRB) (Protocol ID 2202). The authors acknowledge the illustration and editorial contributions of M. Belan, S.K.X. Warman, and A.J.H. Warman. They thank Donnie Reid for his positive and enduring influence on their field planning efforts. Finally, to those whose job it was to keep the BASALT team safe and happy in the field—Linda Kobayashi, Jamie Peer, and Zena Cardman—the authors express their deepest gratitude. This is BASALT Publication Number BASALT-2018-008.
Author Disclosure Statement
No competing financial interests exist.