
Abstract
Using a two-dimension array of MOSFET switches, a robust, high speed object tracking CMOS sensor is presented. The edges of the image scene are extracted by the in-pixel differential comparators and a region (object) of interest, which is selected by the user, is segmented using the switch network. Tracking is performed by automatic reselection of the desired region. The proposed design presents less sensitivity to threshold adjustments compared to the binarization technique. The processing is mainly performed in analog domain, thus reducing dynamic power dissipation and making the chip ideal for low power applications. The sensor has been designed as a 50 × 50 pixel VLSI CMOS chip in the 0.6 μm technology. Features such as power dissipation, output latency, and operating frequency are reported.
Introduction
The processing of image data through traditional image sensor-processor (a CCD imager, frame buffer, and DSP for example) or software techniques tends to be relatively expensive, high power consuming and occasionally slow. Huge amount of data is transferred from the imager through the frame buffers and to the processor, a bottleneck in many cases. Usually in machine vision applications it is not the image that is required from the processing, but part of the information extracted from the image, and complex tasks (such as extraction of an objects position) are generally time consuming. Although processing speeds are increased by various techniques such as pipelining [1] but some problems such as latency remains. If the extracted information is used in a feedback loop to control the motion of a mechanical system (motors, actuators, etc.), the delays and latencies of the sensor can severely affect the stability of the system [2].
Intelligent image sensors are a combination of photo-detectors and processors, in which each photo-detector is associated with a processing element [3]. This configuration enables high speed and low latency processing of image data and in some applications can be a suitable alternative for traditional imager-DSP approach, by reducing complexity, power consumption, and production cost.
The array of photoreceptors and their associated processing elements fill out the entire chip and perform some or all of the required processing in parallel. The in-pixel processing of image and inter-pixel transfer of data makes temporal and spatial vision processing possible.
The extraction of an object's movement is a demanding need in machine vision algorithms [4]. Different sensors have been proposed to obtain information on the movement of a target in the scene. Some of these sensors extract velocity and direction only [5], whereas in some position control applications, not only velocity, but also the sensed position of the object is also required. The sensors presented in [6] and [7] extract the position of a desired object in the scene. In these sensors image binarization is performed at the first stage of processing and thus a variable threshold is required. Furthermore, tracking is only performed on light objects in a darker background. Some presented sensors perform tracking on a specific feature of the desired region [8–10]. [8] and [9], for example, track the local maximum of the desired object. As reported, this method is more of use in the tracking of bright light spots or laser pointers. The tracking sensor proposed in [11] performs motion vector calculation to identify the motion direction of the target and requires the movement of the chip to lock on the desired target, which can be a limitation in some cases.
In this article an object tracking sensor which tracks the position of a target inside the visual scene is presented. The target or object of interest is selected manually from an initial state. Different approaches can be used for initial selection; like starting the target movement from an initial position and loading the chip with the predetermined coordinates of the position (tracking linear actuators for example), or sensing the target in some initial locations and loading the chip with the corresponding coordinates (tracking cars passing checkpoint for example). Similar to many previously proposed designs, the tracking architecture described here reduces the computational cost of the processing stages by performing the computation at the focal plane itself and transmitting only the result of the process (the coordinates of the tracked object), instead of the image data. It differs from the previously proposed designs in that the feature to be tracked is assumed to be the region inside an edge contour. With this assumption the segmentation technique can be used to extract homogenous regions and tracking is performed on the segment containing the object of interest. The segmentation process is less sensitive to threshold adjustments, compared to the single threshold value binarization techniques [6, 7], enabling better operation in the actual working environment.
The first part of the article describes the overall architecture of the chip and presents its different blocks. The second part focuses on the details of each block including the basic pixel. The layout of the chip and simulation results are presented next. In the conclusion, specific applications of the sensor are presented.
The Proposed Architecture
Overall Structure
The block diagram of the designed architecture is shown in Fig. 1. The main blocks that construct the sensor are: the basic pixels or cells (block A), the coordinate generator circuitry (block B), the coordinate register (block C), and the one-hot coordinate data to analog data converter (block D). The image is focused on the two-dimensional array of basic pixels (block A). Each basic pixel contains photoreceptor circuitry and analog processing elements. The photoreceptors sample one frame of the scene and the processing elements divide the scene into homogenous regions by detecting edges and performing image segmentation, and project the selected segment on axes X and Y. Segment selection is initially performed according to an initial point in the image scene provided by the user, which represents the desired target to be tracked. The selection process in subsequent frames is performed according to the coordinate extracted from the previous frame. The coordinate generator (block B) at each axis assigns a one-hot code to the projection of the selected segment. The points assigned in axes X and Y represent the coordinates of the object (region) under track and are stored at the corresponding coordinate registers (block C). The tracking cycle and the segment selection continues from these new coordinates. The coordinate at each axis is converted to analog form and outputted at the chip pins (block D). The analog signal can be used to interface with analog controlling systems. In the case of digital controlling systems, the one-hot coordinate representation can be simply coded to binary format and outputted at the chip pins.

Block diagram of the proposed chip and corresponding interconnections.
As the target moves across the scene, the region highlighted by the previous coordinates also changes its position and new coordinates are obtained for the new cycle. If the displacement of the selected segment in two consecutive cycles is less than half of its expansion, the produced coordinates, select the same region as of the previous cycle and the new coordinates follow the target with a latency of one cycle. The shutter speed of the photo detector circuitry is limited by the properties of the photodevice element. Typical photo detectors provide shutter speeds as fast as 0.1 ms in moderate illumination levels [12]. Considering this limitation, the chip is designed for the operation in a clock cycle frequency of 10 KHz. With this operation frequency, the sensor can reliably track moving objects with speeds less than υ pixels/s, where υ is 10 K × half of the object expansion expressed in the pixel unit. Since the image acquisition and processing is performed at 10 KHz, and new tracking coordinates are produced in each cycle, the latency of the sensor will be 0.1 ms, a reliable value for controlling high speed mechanical movements. Traditional imaging devices have much higher latencies between the image acquisition phase, image to memory data transfer and data processing stages.
The next sections will describe in detail the structure of each block.
As explained in the overall structure, the array of basic pixels has the function of image segmentation, segment selection, and projection of the selected segment (region). Each pixel of the array is composed of a photoreceptor circuitry, and analog processing elements (Fig. 2). Metal layer 3 is used as a light mask, covering the entire chip except the photoreceptors. Each pixel is interconnected with its adjacent neighbors, and the array of pixels contains the comparators network layer, the switch network layer, and the row-column adder layer. An interconnected array of 3 × 3 basic pixels is shown in Fig. 3. For clarity, the comparators and the photo detection circuitry are illustrated as blocks.

Structure of a single basic pixel block.

A 3 × 3 array of basic pixels and their connection with other blocks. (a) The complete array. (b)-(d) The decomposition of the array into the comparator network layer, switch network layer together with the activation transistors and the row-column adder layer, respectively.
Edges of the image are detected by the network of edge detecting comparators. It evaluates the function |v1-v2| > Vcmp, where v1 and v2 are the inputs to be compared, and Vcmp is the threshold value for edge detection. As can be seen in Fig. 3b, each cell contains two comparators that compare the light intensity level of the related pixel with those of the adjacent pixels in the right and bottom. The result is a digitized data, ‘1’ to indicate that no edge is detected and ‘0’ to indicate an edge is detected. With the edges obtained, segmentation can be performed by using the switch network [13]. The switch network layer of the basic pixels array is shown separately in Fig. 3c. Each switch in the network is opened when an edge is detected and closed when the comparators indicate no edge. A specific spreading node, corresponding to a point of the desired object, is set to high (activated) when the relative row and column lines of that point are active in the coordinate registers. Assuming that the borders of the switch network are connected to the ground and starting with the high voltage (‘1’) on the spreading node, the value spreads in the network nodes through the closed switches and up to the points that the switches are opened. The result is the selection of a homogenous region (segment) inside the target filled with ‘1’s, and the rest of the image filled with ‘0’s. The situation is illustrated in Fig. 4.

Image segmentation of the switch network in an array of 6 × 6 basic pixels. (a) A grayscale input image. (b) The pass transistors states resulting from the input image. The nodes represent each pixel and the vertexes between them represent the pass transistors.
When spreading starts from an activated point, the current is drawn from the switches, introducing some voltage drop; but as the node capacitors fill up, the current reaches zero and in equilibrium, all nodes inside the selected region take the same voltage as the activated point. In this configuration no path from the spreading nodes to ground should exist. A problem arises with the lack of this discharge path when the target moves and some ‘1’ nodes fall outside the contour with no path to discharge. (Similar to the switch network presented in [13], there could exist a path from a specified node through the switch network and to the grounded borders of the network, but for isolated regions, this is not always the case.) The solution used here is to reset the existing ‘1’s at the beginning of each cycle by setting the row lines of the activation transistors in Fig. 3c to ‘0’ and the column lines to ‘1’ and thus discharge the spreading nodes of the switch network. Since the object coordinates in the previous frame are stored in the coordinate registers, the target will not be lost by resetting the switch network. To optimize the area, the switches are chosen to be NMOS instead of NMOS-PMOS pass transistors. This structure needs a spreading (activation) voltage less than VDD-Vg so that all paths operate in the triode region. A voltage of VDD/2 is used for this purpose. This voltage is also used in the comparator section.
At this point the three-dimensional data of the image (two dimensions for the two axes and one for the level of intensity) is converted to a two-dimensional data representing a homogenous region of the object, and tracking is performed on this special feature. In order to assign specific coordinates to the extracted segment, the region is projected on the two axes. In this way the coordinate assigned to the projection (using the coordinate generator blocks) in each axis, can be assumed to be the coordinate representation of the segment itself (Fig. 5).

Target coordination assignment based on the coordinates extracted from the projections.
The projection structure is an analog adder, adding up the number of pixels in the segment at each row, to extract the projection on the Y-axis, and at each column to extract the projection on the X-axis. The process of converting the two-dimensional data to two one-dimensional data is shown in Fig. 6. The adder, built up from a 3 × 3 array of transistors, is shown in Fig. 3d. The diagonal lines in the figure are connected to the spreading nodes which are “high” if the pixel corresponds to the selected segment, and are “low” if it does not. These voltages are used as the inputs to the vertical and horizontal analog adders. Vertical data lines produce projection on axis X and horizontal data lines produce projection on axis Y.

Region projection procedure using analog row and column adders.
The comparators perform edge detection based on the difference between voltages that represent the light intensity of the adjacent pixels. If the absolute value of the voltage difference (|v1-v2|) exceeds a threshold voltage then an edge exists and a ‘0’ is returned. If the absolute value does not exceed the threshold voltage then the two adjacent pixels belong to the same segment and a ‘1’ is produced. Simulation results showed that a threshold voltage of 200 mV produces acceptable segmentation results. The function |v1-v2| > Vcmp is implemented by evaluating “v1-v2 > 200 mV OR -(v1-v2) > 200 mV.” Since a double ended differential amplifier produces both terms (v1-v2) and -(v1-v2), the function can be implemented using the circuit shown in Fig. 7. Transistors M1, M2, M3, and M4 build the differential amplifier with outputs F1 = Av × (v1 - v2) + Vdc and F2 = -Av × (v1 - v2) + Vdc on nodes B and A, respectively (in the equations Av is the circuit differential voltage gain and Vdc is the output offset voltage). Gate M5 and M6 evaluate F1 > Vref - Vth and F2 > Vref - Vth, respectively, and their parallel connection extracts “F1 > Vref - Vth OR F2 > Vref - Vth,” where Vth is the threshold voltage of the transistors. An inverter is used in the output stage of the comparator to digitize the result to ‘0’ or ‘1’. Since the biasing current of the differential pair is adjusted to have a dc offset (Vdc) near the voltage Vref - Vth for nodes A and B, the relationship between Vcmp and Vref is roughly Vcmp = Vref/Av, thus Vcmp can be adjusted by varying Vref and Av. The amplifier is designed with diode connected loads, providing Av = 10. VDD/2 is chosen for Vref to provide the required Vcmp = 200 mV. Furthermore, VDD/2 is used in the switch network circuit as explained earlier and also for the dc offset of the photo circuit output.

The edge detector of block A.
Since the differential pair is designed with diode connected loads, the gain of the differential pair is independent of the operation point and as it is shown in Eq. (1) it is related to the driver transistor (W/L)n and load transistor (W/L)p dimensions. Hence, the output voltage of the differential pair is relatively linear over the differential input voltage range and the only limitation on the differential and common mode input voltage swings is the operation of the transistors in the saturation region.

The input-output voltage transfer curve of the edge detector is shown in Fig. 8. As it can be seen from the voltages on nodes A and B, the differential pair of Fig. 7 operates in a linear region for differential inputs from zero to the comparison threshold voltage and for common mode inputs from 1.5 V to 2.5 V. The transistors marginally enter the triode region for high common mode inputs. It changes the comparison level to some degree. Other factors that affect the comparison level are the mismatches and noise which will be examined in the simulation results section.

Voltage on nodes A, B, and Output of the edge detector versus the differential input voltage. (a) The common mode input voltage level is minimum (1.5V), and (b) the common mode input voltage level is maximum (2.5V).
As the number of comparators is relatively high throughout the chip, they are only activated when the integration cycle of the photocircuit is completed and the processing is required. This consideration effectively decreases power consumption.
The basic photo circuit used in the design is the conventional sample and hold circuit consisting of a photodiode, sample capacitor, and switches shown in Fig. 9 [6].
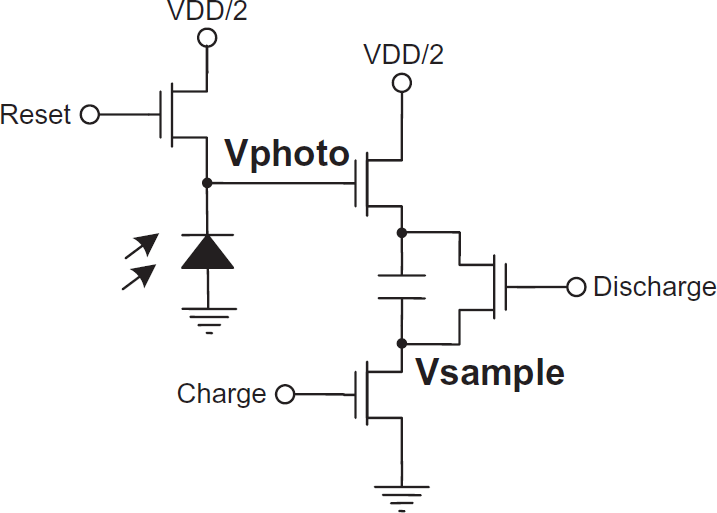
The photocircuit of block A [6].
The Coordinate Generators (Block B)
The function expected from this block is to locate the center part of a projected region; but an alternative to finding the center, is finding the position of the maximum, resulting in a simple circuit. Figure 10 shows the difference between the geometric center positioning and maximum dimension positioning. Although some exceptions are introduced in finding the location of objects using the maximum technique (a ring objects or a rectangle completely parallel with the chip borders for example), but in practice it is an effective solution for many regular, well-behaved objects. The maximum detection function (Fig. 11) is implemented by using a WTA circuit [14]. The inputs of each WTA (one for each axis) are connected to the projection adders outputs. The output of the WTA on each axis activates the row or column line where the projection is maximum and the region is heavier. The activated lines are registered for the starting of the next cycle.
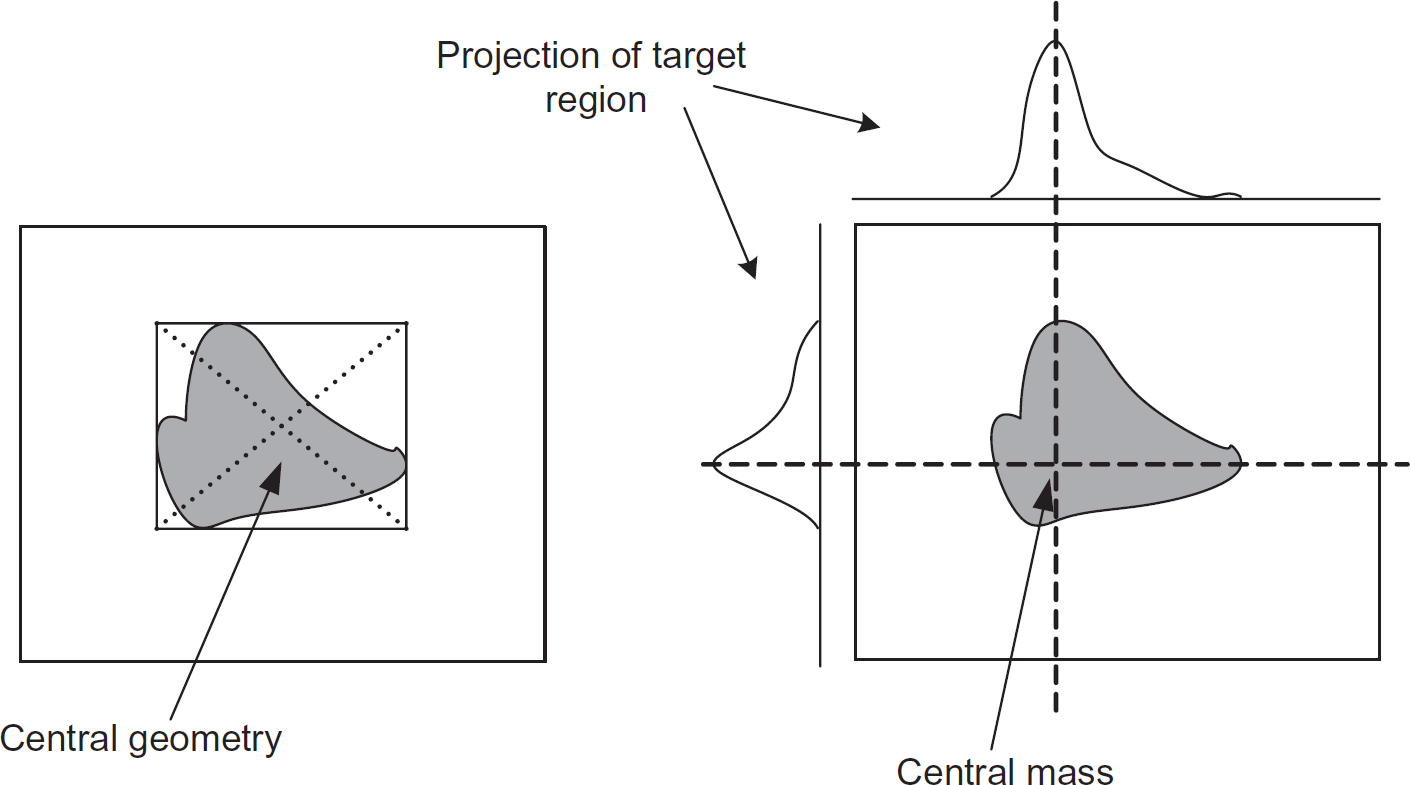
Extraction of geometric center coordinates vs. maximum dimension coordinates.

The WTA circuit used for coordinate generation on one axis. The projected column/row adders are connected to the input lines of the WTA (In1-In50) and the output lines (Out1-Out50) are connected to the coordinate registers for each axis.

Arrangement of different components in the basic pixel and corresponding layout.

Vcmpmax and Vcmpmin for different runs of the Monte Carlo mismatch analysis. The result shows Vcmp versus the common mode input voltage level.

Simulation results for a 50 × 50 pixel signal spread. The + waveform is the current drawn from the supply, The ♦ is the starting activation input pulse, and the rest of the Waveforms correspond to the output node at distances 1, 2, 3, 49 and 50 pixels away from the activation node respectively.
The Coordinate Registers
The activated coordinate lines for each axis are stored in the coordinate registers. The coordinates are used to specify the activation point in the switch network of block A, for subsequent processing cycles. The registers are also used when the array of block A is at idle cycle (The state where the comparators are turned off to reduce power consumption and the switch network is cleared by setting the outputs of the X-axis coordinate register to ‘1’ and the outputs of the Y-axis to ‘0’.) In this state the target position remains valid in the registers.
One of the challenges in CMOS image sensor design is to overcome the tradeoff between processing power, the fill factor, and the chip area. Since the basic pixel block is repeated throughout the chip, proper design of its processing elements is necessary. In a constant chip area and pixel resolution, increasing the size of the processing elements for more computational power, means reducing the size of the photoreceptors and thus reduction of the fill factor (ratio of the area filled with photoreceptors to the entire area), and since the signal-to-noise ratio decreases with smaller photoreceptors, there is a limit to decreasing the photoreceptor size. However, the aforementioned tradeoff is getting less important as the feature sizes decrease, making it possible to implement more processing transistors in a constant available area.
The layout design and simulations of the proposed sensor is performed in the 0.6 μm MOSIS technology. Table 1 contains information on the chip specifications, gate count (number of transistors), layout dimension, resolution, etc.
Proposed chip specifications

Proposed chip specifications
The layout and the arrangement of different elements of the basic pixel are shown in Fig. 12. This arrangement provides a fill factor of 25% which is common among the tracking sensors currently reported [5–7]. Furthermore, the fill factor can be enhanced by using image sensor micro lenses [3]. Three metal layers and one poly layer is used in the design. Metal layer 3 is used to mask out the transistor circuitry from incident light and also used to route the ground, VDD, and VDD/2 signals. The small areas opened in metal layer 3 are masked from light by metal layer 2. The complete block layout is mainly composed of the basic pixel array. Current sources, WTAs, coordinate registers, digital to analog converters, and I/O pads are located at the periphery.
The first part of this section presents the sensor limitations by using HSpice Monte Carlo and noise analyses. In the second part, the overall simulation of the sensor is presented.
Sensor Operation Constraints
In the following, different issues that affect the output results of the edge detection stage, segment projection stage, and the WTA stage are discussed. In the analyses it is assumed that a segment with uniform intensity Isegment is placed against a background with local intensity Ibackground. The maximum allowable fluctuation (intensity variations) in the segment is noted by ΔIsegment/pixel.
The edge detection stage suffers from various non-ideal issues. The dominant effects are the offset voltage due to mismatches, the input referred rms noise voltage, and the offset voltage due to common mode gain (common mode voltage swing/CMRR). These effects can be referred to the comparators inputs and eventually considered as the Vcmp comparison level changes. Furthermore, the photodiode shot noise and reset noise will also change the actual inputs to the comparator, while the photodiodes mismatch effects are negligible since the photocurrent and the photodiode capacitance are scaled proportionally thus the photodiode voltage output remains constant [3].
The input offset voltage due to mismatches and common mode gain is computed using Monte Carlo analysis. The maximum and the minimum comparison voltages required to produce logical ‘0’ and ‘1’ outputs are determined for different common mode voltages. The result is plotted in Fig. 13. As the figure shows, the maximum voltage comparison level is as high as 350 mV and the minimum is as low as 130 mV. The worst case analyses show that the comparison voltage can change by 20 mV.
The comparator input referred rms noise is also evaluated 6 mV using HSpice noise analysis. Eqs. (2) and (3) represent the shot noise and reset noise at the photodiode output node respectively. In these equations, K and q are constants, Cint is the capacitance at the photodiode node, T is the temperature in Kelvin, ipd is the mean photodiode current, and tint is the integration time. The sum of shot noise and reset noise is 4 mV for the presented structure. With the noise sources taken into account, it is obtained that Vcmpmax = 380 mV utmost and Vcmpmin = 100 mV at least, where Vcmpmax and Vcmpmin are the actual maximum and minimum comparison voltage levels, respectively.

Assuming that the image scene is focused sharply on the chip focal plane, the corresponding segment will be separated from the background by an intermediate pixel boundary (the border between the segment and the background) with intensity Iintermediate. The value of Iintermediate is between Isegment and Ibackground, thus in the worst case the contrast (intensity difference) between the segment and the background will be halved. The constraint required to detect a closed loop edge contour on the segment boundary is presented in (4), where Vsegment, Vbackground, and ΔVsegment/pixel are the voltages produced at the photodiode output due to Isegment, Ibackground and ΔIsegment/pixel respectively. Knowing the shutter speed, the voltages are proportional to pixel intensity by the conversion factor α. In the present work, α is equal to 0.5 mV/lux for an integration time of 0.1 ms. The factor enhances as the integration time increases. If the constraint presented in (4) is met, the object boundary can be detected. It shows the requirement of a high contrast object label (marker) on the background field.
The detected edge contour lies either between the intermediate pixels and the background or between the intermediate pixels and the segment itself. Since the edges can be shifted by one pixel in the horizontal and vertical orientations, the tracking position will suffer from one pixel position error.
The switch network transistor mismatches have small effect on the spreading voltage since the transistors operate in the triode region.
The adder transistors that project the selected segment on the axes are distributed throughout the chip. In fabrication, the variation of some parameters (threshold voltage and current gain for example) is not generally random throughout the chip and is rather a spatial parametric variation. This situation is a major drawback in the distributed analog adder structure, since in the worst case the gradient can be aligned with the adder rows or columns and thus multiplying the effect of mismatch on the projected result. If the maximum current mismatch between two corner transistors with the same gate-source voltage is considered k%, in the worst case the projected result could suffer from a value of n × k% error, where n is the number of pixels in a row or column of the selected segment. Furthermore, as n increases, the current noise component of the adder increases, but it is negligible compared to the error due to mismatches. To properly detect the maximum feature on each axis, the current error due to mismatch (n × k × ITadder), subtracted from the current produced by a single adder transistor (ITadder), should be larger than the WTA minimum detectable current difference (IDmin reported in [15]). The equation is shown in (5)

Since ITadder = 40uA, IDmin = 2uA and k = 5%, the maximum segment expansion over the vertical or horizontal axis should be limit to 19 pixels. As shown earlier, smaller segments should move slower to avoid tracking lost. Simulation results confirm that the maximum feature is detected correctly in the presence of mismatch if the criterion is met.
The main limitations for the operating frequency of the chip are the photoreceptor charge time and the processing delay (the time required for the spreading signal to fill out a complete closed contour starting from the activated point). As will be shown, the processing delay is limited to 100 ns utmost which is negligible compared to the charge time required for the photoreceptors. The waveforms for a specific 50 × 50 two-dimensional voltage spread from the upper most left corner and through the activated pass transistor switches and to the entire nodes are shown in Fig. 14. As it can be seen the worst case delay is about 100 ns, a small value compared to the time required for the photoreceptors. Since the processing is accomplished much earlier than the photoreceptor timing requirements, the processing elements are sent to an idle state to reduce power consumption. Simulation results show that a 10 KHz clock rate is enough to track the position of a rotary motor shaft spinning at a speed of 1500 rpm with the accuracy of one pixel error.
The next part presents the overall simulation of the structure.
The timing waveforms shown in Fig. 15 are used for chip operation and overall simulation. The timing fulfills the requirements of each block and provides correct results at each stage. At the beginning of the operation, signals “load,” “x axis serial data,” and “y axis serial data” are used to load an initial tracking point and to identify a region to start the tracking. For the purpose of simulation, the HSpice photocurrent radiation feature is used. The radiation netlist file is created using custom software, programmed to convert image sequences to amount of radiation striking each photoreceptor. Simulation is performed by merging the main circuit netlist with the netlist obtained from the image sequence. A test image sequence captured at 10 K frame/s is shown in Fig. 16. It is obtained from a marker rotating on a shaft at a speed of 1500 rpm. The timing waveforms are adjusted to load the initial search point on the white round marker and simulation is initiated. Waveforms on the output pins are illustrated in Fig. 17 showing the correct tracking of the desired object. The applied clock pulse has a duty cycle of 10% hence the comparators are in the idle state for 90% of the time. The processing is performed on the high level of the clock pulse (10% of the complete clock cycle) which is enough for both the signal spreading phase and other stages to reach their final values. The rest of the clock cycle time is used by the photoreceptors for image acquisition. The amount of photoreceptor exposure is controlled by the shutter signal. The comparator current sources are turned on when the clock level is high thus reducing static power dissipation. The sum of VDD and VDD/2 supply instantaneous power usage is also shown in Fig. 17. The max peak current and average power consumption are reported in Table 1 for some other sequence test images and for different illuminations. Since the major power consumption is related to the static power dissipation of the comparator biasing, and dynamic power dissipation is negligible at the operating frequency of 10 KHz, the power consumption is relatively low compared to the previously reported tracking sensors which operate at high clock frequencies (the tracking speeds of these sensors still remain the same or even less) [5, 6, 9].

Timing waveforms required to control the chip. × is the clock signal, ∘ is the load signal, ▵ is x axes serial data, □ the y axes serial data and ⊠ the shutter signal. (a) Waveforms are used to load an initial tracking point into the chip. With the load signal high, the x and y axes serial data are taken high at the appropriate clock number. (b) Subsequently waveforms are used to continue with the tracking process on the desired region. In this case a 10% duty cycle clock pulse and an appropriate shutter signal is used to control the timing.

Image sequence used to simulate the chip. The parameter ‘n’ shows the frame number. A total of 400 frames are captured in each shaft cycle.

Output waveforms resulting from the simulation. (a) and (b) Waveforms correspond to the voltages produced on axis X and Y respectively, and (c) the waveform is voltage of axis X relative to voltage of axis Y. (d) This waveform is the instantaneous power consumption.
A high speed object tracking sensor was designed and the layout masks were created for the 0.6 μm MOSIS technology. The post layout simulation results showed successful tracking of a marker rotating at a speed of 1500 rpm. The sensor produced correct analog outputs representing the position of the marker at the X and Y axes in each cycle. The output is suitable for analog controlling systems. The latency from the chip is small enough to use the chip as a feedback sensor to control high speed mechanical systems. Furthermore, the low power consumption of the chip makes it a choice in mobile and wireless applications. Wireless sensors are opening their way in many applications, providing the ability to access data from hard reaching areas [16]. These sensors are usually powered independently using solar energy and backup battery, thus low energy consumption is an essence. On the other hand low bandwidth data transmission helps both reduce power consumption and save wireless channel usage. The implementation of the proposed sensor in a wireless image tracking system would be of interest since the wireless image system does not need to transmit images but only part of the processed data that is required.
Contact-free feedback from isolated mechanical system (chemical hazardous areas for example) is another application of the chip where feedback is provided from a distance and no mechanical coupling with the actuator, motor and the moving parts is required.