Abstract
Real-time tracking of moving targets using wireless sensor networks has been a challenging problem because of the high velocity of the targets and the limited resources of the sensors. CPA (closest point of approach) algorithms are appropriate for tracking fast-moving targets since the tracking error is roughly inversely proportional to the square root of the target velocity. However, this approach requires a specific node configuration with reference to the target trajectory which may not always be possible in randomly deployed sensor networks. Moreover, our mathematical analysis of the original CPA algorithm shows that it suffers from huge localization errors due to inaccuracies in sensor location and measured CPA times. To address these issues, we propose an enhanced CPA (ECPA) algorithm which requires only five sensors around the target to achieve the reliability and efficiency we want for computing the bearing of the target trajectory, the relative position between the sensors and the trajectory, and the velocity of the target. To validate the ECPA algorithm, we designed and implemented this algorithm over an actual data-centric acoustic sensor network as well as simulating it in an NS-2 simulator. The results of our field experiments and simulations show that we can achieve our goals of detecting the target and predicting its location, velocity and direction of travel with reasonable accuracy.
Keywords
Introduction
Wireless sensor networks are composed of relatively inexpensive sensors capable of collecting, processing, storing, and transmitting information among networks. An interesting application of wireless sensor networks (WSN) is target localization and tracking in a hostile environment, where physical access is accompanied by some form of danger (e.g., the battlefield).
Due to the high velocity of targets and limited resource of sensors, localization and tracking of moving vehicles is a challenging problem in WSN. First, the localization algorithm must perform well (localization error must be very low, e.g., 3 m), regardless of the high speed of the mobile target, i.e., higher velocity must not cause higher localization errors. Second, the entire system must be energy efficient. Since network communication consumes significantly more power than the local computation, the size and number of messages exchanged among sensors should be minimized. Third, due to the limited capacity of each sensor, tracking a mobile target requires multiple nodes to collaboratively share information between each other. Fourth, target tracking has much higher requirement than target localization since velocity and direction of movement are also required for tracking purpose. Fifth, the tracking algorithm must meet the real-time deadlines of the target tracking application. It must be as fast as (or faster than) the velocity of the vehicle.
To meet these design requirements, the CPA (closest point of approach) algorithm [1, 2] is one of the best candidates. The CPA algorithm is well suited for tracking targets at high speeds. In fact, higher speeds result in lower localization error. In addition, the only information exchanged between sensors is the measured CPA time, so the size of the exchanged message is very small. Furthermore, the algorithm not only calculates the target position but also the velocity and moving direction of the target. Therefore, we have adopted the CPA based algorithm for our target tracking system.
The original CPA algorithm, however, cannot be directly applied to wireless sensor networks because specific deployment configurations of sensors are required [1, 2]. For instance, in [1] the target trajectory must intersect the convex hull composed of sensors without evenly splitting the sensor field, while in [2], the target trajectory must be located outside the convex hull of sensors. In a realistic system, the target will trigger a set of sensors that may not satisfy the configuration requirements. Moreover, due to the measurement errors in sensors location and CPA times, there will be huge errors in locating the target trajectory. In most cases, the original CPA algorithm may completely fail to localize the target because of the large errors in input parameters. Therefore, neither of the CPA algorithms [1, 2] may be directly used.
To solve these problems, we developed an enhanced the CPA (ECPA) algorithm. It first determines the network configuration based on CPA times at the sensors, and then selects four nodes which satisfy the node deployment requirement of the original CPA algorithm. By running the original CPA algorithm, four possible trajectory directions can be obtained, and the one which is closest to the estimated slope of the target trajectory will be considered the correct one. Finally, the trajectory location is recomputed based on the newly calculated direction information. Our mathematical analysis of the ECPA algorithm shows that it results in much smaller errors in localizing the target trajectory than the original CPA algorithms. Simulations and field experiments verify that the ECPA algorithm causes very small localization errors.
There are four main contributions in this paper. First, we have developed the ECPA algorithm that effectively computes the target location, velocity, and direction in wireless sensor networks composed of low-powered, inexpensive nodes. Second, we performed a mathematical analysis of both ECPA and CPA algorithms, and have shown that the ECPA algorithm performs well in WSN and generates much smaller errors in locating target trajectory. Third, we have implemented the ECPA algorithm in both simulations and field experiments. The results also confirm that the ECPA algorithm is more efficient for the real-time target tracking. Fourth, we designed and implemented a sensor networking system that integrates and interoperates the ECPA algorithm for accurately computing target location, velocity, and direction with control software for controlling video sensor nodes that capture image or video of the target at its predicted location.
Related Work
There are many research efforts on target detection and tracking in wireless sensor networks that describe several aspects of collaborative signal processing [3–6], target tracking with camera sensors [7], and real-time application for field biologists to discover the presence of individuals [8]. Recently, a set of approaches [9–12] were proposed to solve the target localization and tracking problem with proximity binary sensors which report only one bit information to indicate if a target appears. Though the information transmitted in networks was reduced, the localization error was increased. As proven in [10], the achievable spatial resolution in localizing a target trajectory is of the order of 1/(ρR), where R is the sensing radius and ρ is the sensor density per unit area. Suppose there are 25 sensors, with a sensing radius of 20 m, deployed in a 100 × 100 m2 area, then the lower bound of the localization error will be 20 m. Therefore, it is only suitable for very dense sensor networks.
Collaborative signal processing methods, such as the Extended Kalman Filter (EKF), were first used for target tracking in [6, 13], in which fused tracks are processed to predict their future trajectories and this is similar to predicting the state and error covariance at the next time step given the current information using the Kalman filter algorithm. The predicted future track determines the regions likely to detect the entity in the future. These algorithms can effectively localize and track moving targets, but involves too much computation overhead on sensors. Thus, they are inefficient for wireless sensor networks.
In the area of acoustic sensor networks, there are many solutions for target localization and tracking which can be divided into three basic categories: differential signal amplitude (DSA) [14, 15], direction of arrival (DOA) [8, 16] and time difference of arrival (TDOA) [17, 18]. DSA is used by [14, 15] with the assumption that the acoustic energy decays as the inverse of the distance square under certain conditions. However, the main problem with the differential signal amplitude method is that calculating the distance based on the received signal strength is very error-prone. Because the accuracy of the RSSI (received signal strength indication) range measurements is highly sensitive to multi-path fading, non-line-of-sight scenarios, and other sources of interference, this method may result in large errors. These errors can propagate through all subsequent triangulation computations, leading to large localization errors. Other methods [8, 16] make use of the DOA (of the acoustic signal generated by the target) information from different spatially separated sensors, to estimate the target location. However, there are various factors that affect the accuracy of the DOA estimates: accuracy of the hardware used to capture the array signals, sampling frequency, number of microphones used, reverberation and noise present in the signals. Moreover, DOA estimation requires a microphone sub-array on each sensor, which will increase not only the cost of deployment but also the signal processing overhead on sensors. TDOA methods [17, 18] make use of the relative time differences among sensors. To obtain the relative time difference, each sensor needs to first get the dominant frequency of the acoustic spectrum, and then broadcast this information [17, 18]. This may involve collaborative signal processing, such as FFT, which will increase the computational overhead. On the other hand, the audio data exchanged among sensors requires more network bandwidth, a very precious resource in wireless sensor networks.
We chose the CPA target tracking algorithm [1] to estimate the target position, velocity, and moving direction. Intuitively, the CPA time is the instance when the target was at the closest point to a sensor node. Although it belongs to the TDOA category, the CPA algorithm only requires the CPA time to be stored and exchanged among sensors instead of the audio data used in [17, 18]. Since the CPA time could be stored in four bytes (two for the integer and the others for the decimal), the message exchange overhead is low. As previously described, the original CPA algorithm [1, 2] cannot be directly used for wireless sensor networks because of the specific sensor deployment requirements. The ECPA algorithm, however, does not have such network configuration requirements and can also reduce the localization error caused by the uncertainties in the position and the CPA time determination. Therefore, to the best of our knowledge, we are the first to apply an enhanced CPA algorithm in a practical wireless sensor network, composed of acoustic sensors, to localize and track moving targets.
Target Localization Algorithm
Original CPA Algorithm
The CPA (closest point of approach) algorithm was originally designed for localizing low-flying aircraft by means of acoustic sensors [1]. The problem is first formulated in the three-dimensional case and then specialized to the case when the target and sensors are all in one plane. A similar approach was proposed in [2], which requires three non-collinear sensors deployed on the same side of the target trajectory. The trajectory direction can be calculated by solving a single linear equation with the sine and cosine of the angle formed by the target trajectory and a reference axis. Then, the source speed can be computed by a single linear equation. One assumption of the CPA algorithm is that the target moves with a constant velocity (i.e., linear path) while passing through the set of nodes (either three [2] or four [1] sensors). This assumption is necessary because of the limited detection range of low-powered sensor nodes and the high speed of the target. For example, suppose there are 25 sensors uniformly distributed in a 100 × 100 m2 area, the sensing range is 20 m, and the target speed is 30 miles/hour. Then within 5 sec, the target will trigger on the average six sensors around the trajectory, which meets the requirement of the CPA algorithm. We argue that within a short time interval, e.g., 5 sec, the target speed can be considered constant with very small variation.
To make the original CPA algorithm amenable to programming, we reformulate the equations as
follows. As shown in Fig. 1,


where |·| is the Euclidian norm and c the velocity of
sound. Using Eq. (1) to
solve the minimal t and inserting the result into the Eq. (2) yields:

where υv = |

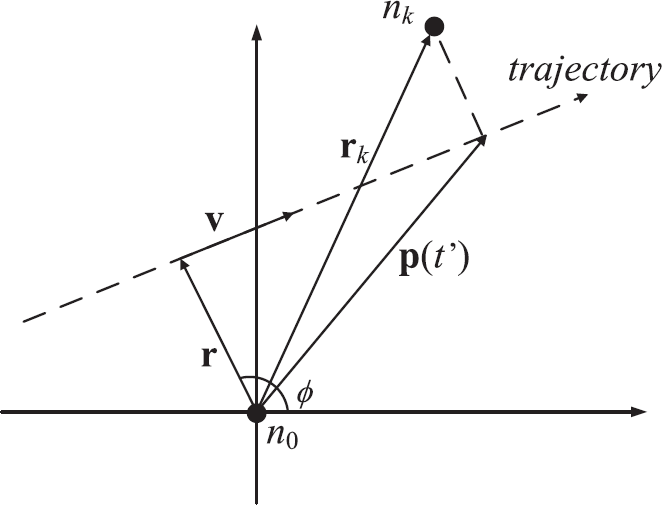
Illustration of CPA localization and tracking algorithm.
In the two-dimensional case,

Thus, Eq. (3) becomes:

For convenience, we place the origin of the coordinate system onto one of the sensors, e.g.,
n0 (

Let

Then, the Mach number M is positive or negative depending on whether the target
crosses the CPA from right to left or left to right, as observed from the origin point. If the
target trajectory intersects the line

Otherwise, if the trajectory does not intersect line

In both Eqs. (9) and (10), there are three unknown variables ϕ, M and r. As M = v/c, the three target motion parameters ϕ, v and r can be calculated if we have three equations. Therefore, except for the origin node, three more sensors are needed, i.e., four sensors should be enough to solve the problem and compute the target motion parameters. However, the method in [1] will fail if the trajectory generates an even decomposition of the sensor field, in which two sensors are on one side of the trajectory and others are on the other side, because the resulting equation of M will be of fourth degree and must be solved numerically.
To solve the localization problem, the trajectory must unevenly divide the four sensors into two
groups: three on one side and one on the other side. To ensure that this situation occurs, we need
to collect information from five sensors. The next section will discuss this process in detail. Now
suppose the origin of the coordinate system is at n0 which is the lone
node, then we have the following equation:



Combining these two with Eq.
(11) when k = 3, yields:


where k = 1, 2, ξ
k
= (x
k
- x3),
η
k
=
(yk−
y3) and δ
k
=
(d
k
- d3). By multiplying
Eq. (14), relative to
specific k value (k = 1, 2), with
ξ3−k and subtracting them, we obtain:

Multiplying Eq. (14),
relative to specific k value (k = 1, 2), with
η3−k and subtracting them again gives:

Adding the square value of Eq. (16) and (17), yields:

Now since all the variables δ1, ξ1, η1, δ2, ξ2, η2 are known, then two possible M can be computed. As we mentioned above, the Mach number M is positive or negative depending on whether the target crosses the origin from right to left, or vice versa. Therefore, by checking the position of nodes with the earliest and latest measured CPA times, the target moving direction can be determined easily.
Then Eq. (14) can be
rewriten as:

Given the computed M and
As discussed in [1], assuming the measured CPA times are unbiased and normally distributed, the target localization errors (including three motion parameters, ϕ, v, and r) of the original CPA algorithm can be calculated through the Fisher information matrix. Although the errors caused by measuring CPA times are very small, that analysis ignored the impact of sensors location error which may cause the original CPA algorithm to fail in most cases. In this section, we will discuss the influence of sensors location error on the computation of distance r and angle ϕ. Accordingly, we describe the reason why the original CPA algorithm cannot be directly applied to sensor networks and how to modify it to correct the problem.
Sensitivity of Distance Computation
In the original CPA algorithm, the error in the computation of distance r is very large because of the errors in the sensor location and the measured CPA time.
There are many methods to obtain sensor locations although these are outside the scope of this paper. Instead, we simply assume sensors know their positions through GPS (Global Positioning System). However, the localization accuracy of the GPS system could be affected by many factors (e.g., the ionosphere error, satellite clock error, orbit error, troposphere error, and multi-path error). The localization error in GPS with a C/A code receiver and either standard correlator or narrow correlator ranges from 0.1 to 3 meters [19]. For other methods, e.g., triangulation, the error may be even larger.
We now describe how sensitive the original CPA algorithm is to errors in sensor locations and
measured CPA times. Suppose the angle of vector

It can be rewritten as:

Small changes in r
k
and
(t
k
- t0) yield a small
change in r as follows:

where σ = Δ(t
k
- t0). Assume t0 is accurately measured,
then σ becomes Δt
k
that
denotes the bias in the CPA estimates at node n
k
.
Suppose Δr
k
= 2 m, then the error in
computed r is shown in Fig.
2, where the x-axis is the error in measured CPA times and the y-axis is the value of
(β - ϕ). Since node n0
and n
k
are on different sides of the trajectory, the
angle between

Error in the computed r in the original CPA algorithm.
By investigating Eq. (22) further, we find that the left and the right side of the equation indicates the error in computed r caused uncertainties of sensor locations and measured CPA times respectively. If σ = 0.1 second, then the error in computed r caused by the CPA times measurement error is 17 meters. If Δr k = 2 m and target velocity is v = 10 m/s, then the error in computed r will range from 0 to 34 meters which depends on the value of β - ϕ. Due to the limited detection ranges of acoustic sensors, the value of r cannot be too large; otherwise, the sound of the mobile target is not loud enough to trigger the sensors. In our field experiments, described in Section 4, we found that the maximal detection range of sensors is about 50 m. However, as shown in Fig. 2, the error in computed r ranges from 0 m to 50 m. Thus, we conclude that the original CPA algorithm suffers from large errors when computing r.
Based on the above analysis, the error in sensors location and measured CPA times can cause the original CPA algorithm to incur significant errors in the computation of r. Therefore, it is not suitable for localizing mobile targets in wireless sensor networks.
Although the computation of r can result in large errors, the computation of
ϕ is very accurate for some specific network configurations because the
error in computing ϕ is highly dependent on the angle between vector
The following is the error analysis for computing ϕ in the original CPA
algorithm. Assuming the angle of

Small changes in r3k and
(t
k
- t0) yield a small
change in ϕ as follows:

where a1 = sin α/M - cos a and
a2 = sin α + cos
α/M. We assume M =
v/c is an unknown constant that is much smaller than l. Since
|cos α| ≤ 1 and | sin
α| ≤ 1, we have a1 ≈ sin
α/M and a2 ≈ sin
α/M. Then Eq. (24) can be expressed as:

Since Δr3k, r3k and c · σ are all constants, then the maximal value of Δϕ occurs when |α - ϕ | is very close to 90° or 270°, and the minimal value is zero when sin(α - ϕ) = (v · σ/ Δr3k).
Suppose Δr
3k
= 2 m,
r3k = 40 m, σ =
0.1 and target velocity is 10 m/s, then the error in computing ϕ as a
function of a and ϕ is shown in Fig. 3. By drawing the contour graph of Fig. 3, we obtain Fig. 4. We note that within the white regions the error in
computing ϕ is very small (less than 10°); but for other regions,
where |α - ϕ| ≈ 90° or
270°, the error can be very large (e.g., 150°). Such huge errors in computing
ϕ are mainly caused by the sensor location error. If there are only errors
in measured CPA times, then Eq.
(24) becomes:

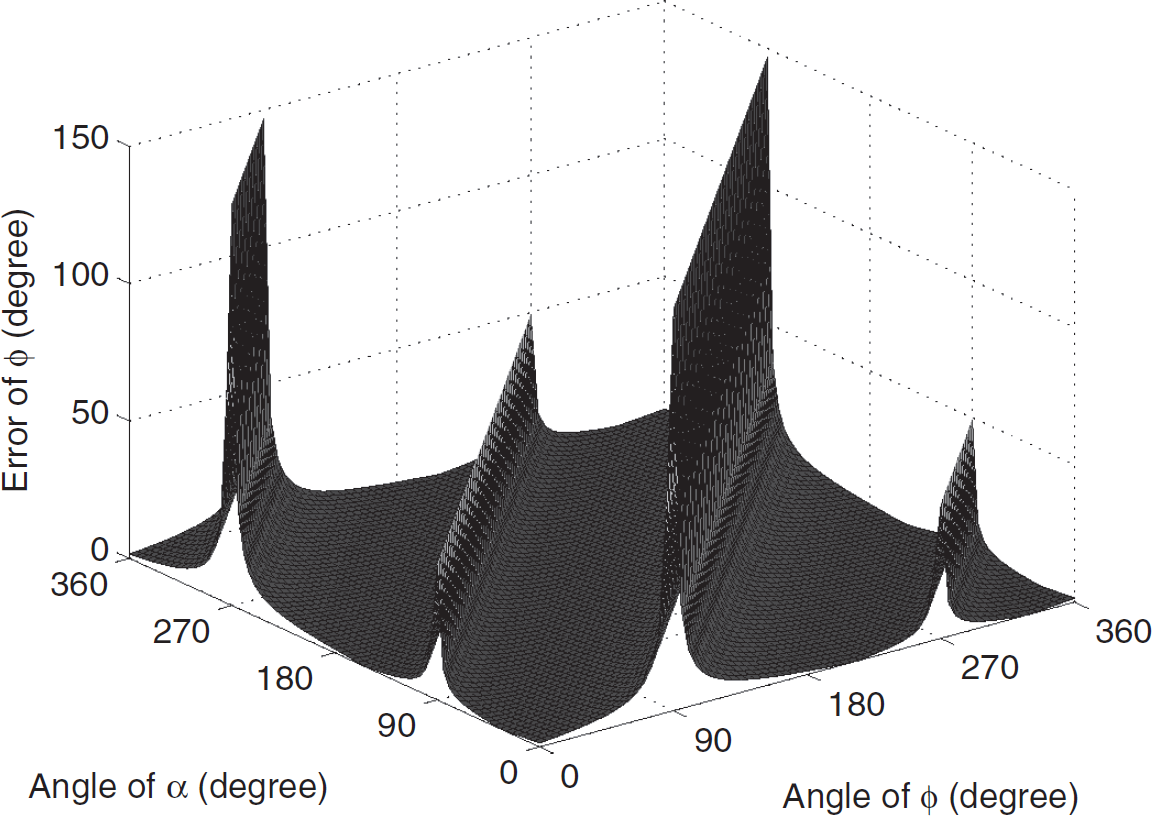
Error in computed ϕ of the original CPA algorithm.

Contour of the computed f error in the original CPA algorithm.
If there are only errors in sensors location, we obtain:

where
From the above analysis, we conclude two facts. First, the computation of
ϕ in the original CPA algorithm is still useful because with certain network
configurations (e.g., (α - ϕ) ≈
arcsin(v ·
δ/Δr3k)), the error in
computing ϕ is very small. For example, as shown in Fig. 4, when α = 120° and
ϕ = 87°, the error in computing ϕ is
0.068°. In fact, this is one of the network configurations we used in the field experiments
where the results show a small error in the computing ϕ. Second, we notice
that the error in ϕ is inversely proportional to
r3k, so the node that is farthest from
n0 should be selected as node
n
k
. On the other hand, the error in
ϕ is also related to the angle α -
ϕ. Therefore, to minimize the error in computing ϕ,
a trade-off between the node distance r3k and angle
(α - ϕ) must be considered. From Eq. (25), by neglecting the
impact of measured CPA times, we obtain:

By minimizing the right part of this equation, a proper node n k can be found for calculating ϕ.
From the above discussions, we have shown the poor performance of the original CPA algorithms in calculating target location and trajectory direction using wireless sensor networks because of two main reasons. First, it must know the network configuration in advance, i.e., how the trajectory divides the group of sensors. For the CPA algorithm in [1], four nodes must be unevenly divided by the trajectory (three on one side and one on the other side), whereas for that in [2], three nodes are to be located at the same side of the target trajectory. In a realistic system, it is impossible to know the network configuration before the target traverse the sensor field. On the other hand, the CPA localization algorithm needs such information to perform correctly. Second, as stated in Section 3.2.1, the uncertainty of sensor location and measured CPA times can cause huge errors in computing target location.
To address these issues, we proposed the enhanced CPA (ECPA) algorithm. It first determines the network configuration by estimating the trajectory slope and location. From these estimates, we can determine whether the error in computing ϕ will be small or large (Fig. 3). If the error is small, then four possible values of ϕ are calculated using the original CPA algorithm and the one that is closest to the estimated value will be chosen as the correct ϕ. However, if the network configuration causes huge errors (e.g., |α - ϕ| = 90°), the ECPA algorithm adopts the estimated ϕ as the correct angle. Finally, the trajectory is located based on the received signal strength at node n0 and n k where n k is the closest node to n0. To check the robustness of the ECPA algorithm, an analysis of the localization error is stated as well.
Estimating Trajectory Slope and Location
For determining the network configuration, we first estimate the trajectory slope based on the CPA time measurements, and then the trajectory location from the received signal strength at two sensors which are farthest from the trajectory.
To estimate the trajectory slope, we select five sensors that are intersected by the trajectory
of the target. This assumption is satisfied if the area traversed by the target is covered by a
sufficient number of sensors [20], so
that a set of five sensors triggered by the target can be selected, e.g., those five on the convex
hull of triggered sensors, such that they are also intersected by the target trajectory. The
original CPA algorithm requires at least three nodes to be on the same side of the target
trajectory, so no matter where the trajectory is located this condition must always hold if there
are five nodes. The two nodes of the five with the earliest and latest measured CPA times are
selected and denoted as n1 and n3, respectively. And
n2 is the node that is located farthest from the line
n1n3, as shown in Fig. 5. Assume that the slope of the target trajectory is
−1/k. Then the slope of line l (which is orthogonal to the
trajectory) is k. Thus the formula of line l is:


Estimating the Slope of Target Trajectory.
The distance from node n1 and n3 to the
line l is:

Since the target is moving at a constant speed, the ratio between
dis1 and dis3 should be equal to:

where t
i
is the measured CPA time at node
n
i
,
ζ
i
is the time of sound propagation from the closest
point of approach (CPA) of node n
i
to its position

Compared to the speed of sound c, the target velocity v in our
system is very small, i.e. v ≪ c. Thus, we obtain
dis1/dis3 ≈
|(t2 -
t1)|/|(t3 -
t2)| because
ζ1 - ζ2 ≪
t2 - t1 and
ζ2 - ζ
3
≪ t3 - t2. Therefore, we have:

After solving the above formula, two possible values of k are obtained. Since line l must be located between line n2n1 and n2n3, we can easily eliminate one and select the correct k. Therefore, the estimated slope of the target trajectory is −1/k.
To estimate the trajectory location, we select those two sensors, n1 and n2 (different nodes from the previous example), with the smallest received signal amplitude, i.e., they are at the farthest position from the trajectory.
Suppose the estimated slope of the trajectory is k′, then we have:

Since the distance dis i is roughly inversely proportional to the square root of the received signal amplitude, we can solve Eqs. (34) to get two possible values of b that denote two possible locations of the trajectory.
Because n1 and n2 can be either on the same or different sides of trajectory, we have two possible network configurations as shown in Fig. 6a and Fig. 6b. In this figure, the two possible trajectories l (the correct one) and l′ (the wrong one) are shown as solid and dashed lines, respectively. In Fig. 6a where n1 and n2 are on the same side of the trajectory, if l′ is considered the expected trajectory, it will contradict the assumption that both n1 and n2 are at the farthest position. In Fig. 6b where n1 and n2 are on different sides, line l′ denotes the trajectory outside the convex hull of sensors which also contradicts the assumption that the trajectory intersects the convex hull. Eliminating the inadmissible solutions, we eventually derive an approximate formula for target trajectory in the coordinate system.

Estimating the location of target trajectory.
Although the estimated trajectory location is not accurate enough to meet our target localization goal (i.e., the localization error is smaller than 3 m), it is sufficient for determining how sensors are divided by the trajectory. Of these five sensors, there are always four that meet the configuration requirement and will be chosen to provide inputs to the original CPA algorithm.
The ECPA algorithm considers the estimated direction (slope) of the trajectory obtained from the previous section as a reference to select the exact ϕ from those four possible values. The trajectory is then recomputed based on this newly computed slope and the received signal strength at the sensors.
Since there are four sensors meeting the requirement of the original CPA algorithm, the target
velocity and the four possible directions of the trajectory can be readily calculated. Based on the
approximate trajectory, four sensors are divided into two groups: one is on one side and the other
three on the other side. Then, from Eq. (18), the Mach number M can be
computed. Inserting M into Eq. (19), together with cos
To calculate the trajectory location, we make use of the newly computed slope of the trajectory
and the received signal strength at the sensors. Suppose node
n
k
is the closest one to node
n0 and the square root of the received signal amplitude at node
n0 and n
k
are
s0 and s
k
, respectively. As
shown in Fig. 7, we have
r/h = r1/h1 =
s
k
/s0, so
r1 can be calculated from the following equation:

where r k is the distance between node n0 and n k . After obtaining r1, we can easily locate the target trajectory and compute r as well. Although the received signal strength at the nodes may be affected by several environmental factors, it does not influence the result as significantly as the errors of sensors location and measured CPA times. This result will be shown in the next section. Furthermore, as it will be shown in our simulations and experimental results, the target localization errors are very small in the ECPA algorithm (less than 2 m).

The computation of distance r1 in ECPA algorithm.
An important issue associated with the ECPA algorithm is how sensitive it is to errors in the input parameters. The robustness of the method requires that small errors in the input will not result in huge errors in the results. To see under what conditions our method is robust, we study the sensitivity of the computation of r1. Since r1 ≥ r, the error in computed r1 can be considered as the upper bound of error in r.
In Eq. (35), the
input parameters include r
k
,
s0 and s
k
. Small changes in
r
k
, s
k
,
and s0 yield a small change in r1 as
follows:

Assuming s
k
≤ s0,
then the above formula yields:

where Δr k is the average error in the sensors location, e k = (Δs k )/s k is the percentage error in received signal strength at node n k . If s k > s0, the same formula applies except that e k = (Δs0)/s0. Figure 8 shows that the localization error, where the x-axis is the distance between node n0 and n k and the y-axis is the percentage error in the received signal strength at sensors. The maximal error in computed r1 is about 6 m, when the distance to node n k is 20 m and RSSI error is 50%. Compared to the original CPA algorithm, as shown in Fig. 2, the ECPA algorithm generates a smaller error in locating the target trajectory.
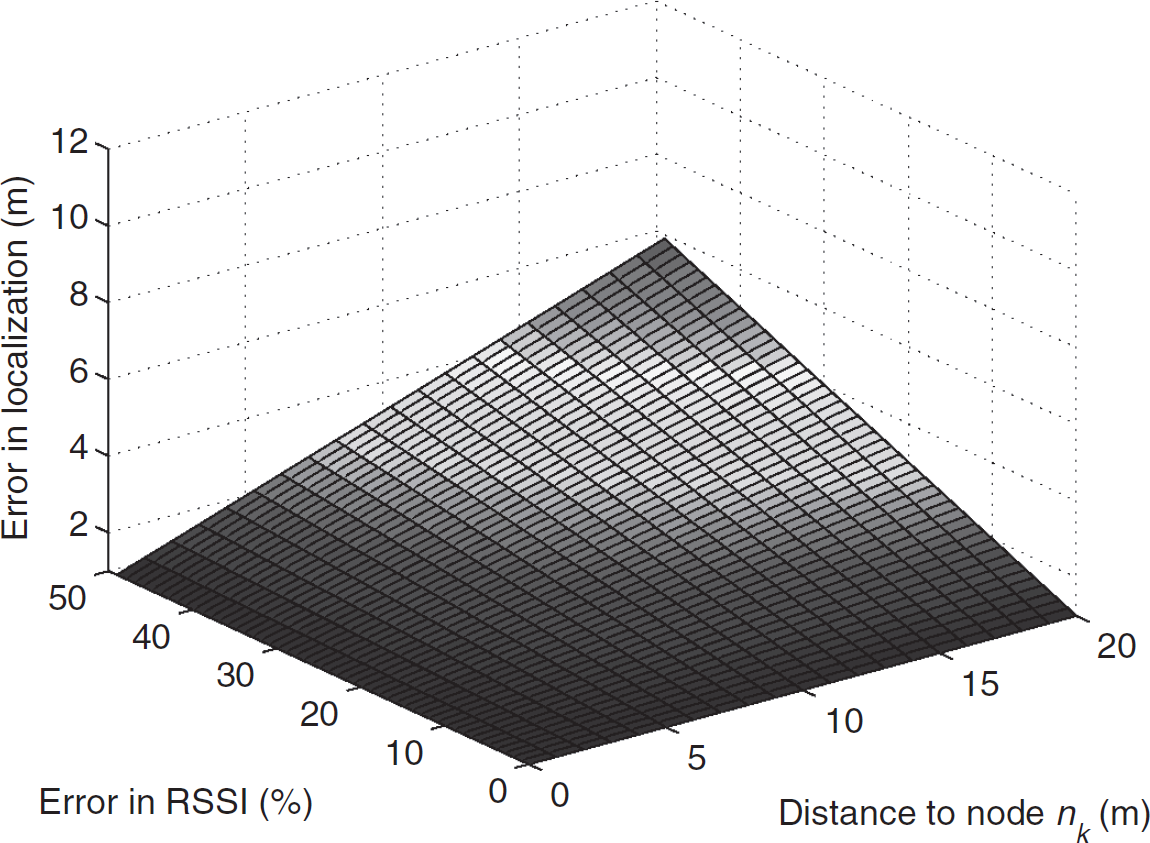
Error in the computed r of the ECPA algorithm.
From Eq. (37), we notice that the upper bound of error in the computation of r1 is roughly proportional to (r k · e k ) since 0.5 · Δr k is a small constant and can be omitted. Therefore, to achieve a smaller localization error, the distance between the triggered sensors should not be too large, which is often the case in most wireless sensor network deployments since the detection range of sensors is quite limited.
Though it is hard to reduce the error in e k , we can choose the node with a shorter distance to n0 as n k to decrease the error in computed r1. For instance, given a typical case, where r k = 20 m, Δr k = 2 m and c k = 20%, then the error in computed r1 will be bounded within 3 m.
In summary, the ECPA algorithm is different from the original CPA algorithm in four aspects. First, the ECPA algorithm can determine the network configuration by itself, which is impossible in the original CPA algorithm. Second, in calculating ϕ, the ECPA algorithm selects the optimal sensors to minimize the computation error, but the original CPA algorithm arbitrarily chooses one. Third, the ECPA algorithm uses the estimated ϕ as the reference to choose the correct value of ϕ while CPA fails to do so because of the huge error in computing r. Fourth, the received signal strength at the sensors is used to calculate the target trajectory instead of the measured CPA times because a small error in measured CPA times can result in a huge error in the computation of r, as proven in Section 3.2.1. To further verify our design, the ECPA algorithm was implemented in both simulations and field experiments as described in the following sections.
In this section, we describe the framework of our target detection, localization, and tracking system and the details of the architecture, hardware information, internetworking mixed networks, and target detection method.
System Architecture
Our target detection and tracking system is composed of six components that are inter-networked together using either IEEE 802.11 or IEEE 802.3, and directed diffusion [21]. Although we currently use only one cluster to demonstrate that the concept is practical, our goal is to eventually extend it to larger networks by adopting multiple clustering algorithms for target tracking, such as [22, 23].
Each of the six components represents a role or a function which is performed by one or multiple
computers. Fig. 9 illustrates the
architecture of the system. The six components are as follows: sensor nodes that monitor for targets, detect the measured CPA time, and report results to the
cluster head through the directed diffusion network, cluster head node that receives the CPA time data from sensors over the directed diffusion sensor
network as the input to determine the position, direction, and velocity of the target by running the
ECPA algorithm, the gateway node that internetworks the diffusion network to the IP network, camera control node that receives packets from the gateway, and then predicts the target position
based on the target velocity and the time delay for package transmission from the sensors to the
camera control node, video capture node that is responsible for interfacing with the video output of the camera, system control node that manages the execution of the remote nodes. For detailed descriptions of
the experiment setup, please refer to [24].

System Architecture for Collaborative Mixed Wireless Sensor Networks.
Each of the nodes is an x86-based laptop computer. The sensor nodes including the cluster head are laptops with 800 MHz CPU and 82801CA/CAM AC'97 Audio Controllers. The gateway node, camera control, and system control are laptops with 1.2 GHz CPU and 512 MB memory. The video capture computer is a Pentium IV based laptop (1.2 GHz CPU) with Windows XP operating system. Each computer is also equipped with an IEEE 802.11b card for wireless connectivity. Video capture is performed using a Pinnacle 500 USB video converter which converts the camera's RCA output to digital video and interfaces with the computer using USB 2.0. The camera is a Sony EVID30, and the interface to the controller is RS232C, 9600 bps, serial port.
Internetworking Mixed Networks
The target tracking system is networked using several different network technologies. The sensors and cluster head communicate through directed diffusion running over an 802.11 network. The camera control and system control machines are connected with an 802.3 (Ethernet) network running IP. In order to internetwork the two networks we developed an internetworking software which executes on the gateway node. The gateway is configured with both an 802.11 interface and an Ethernet interface. The internetworking software converts diffusion packets into IP packets and vice versa.
Target Detection and Time Sychronization
A typical recorded sound (5 sec long) of the moving vehicle with a sample rate of 4 kHz is shown in Fig. 10. The CPA time can be obtained as the instance when the highest amplitude occurs which is indicated by a vertical line in Fig. 10. Obviously, longer recording times will cause higher detection delays, so the recording time should be as short as possible.

A typical audio recording of the moving vehicle.
Time synchronization among sensor nodes was achieved by NTP (Network Time Protocol), which synchronizes the clocks of sensors over packet-switched, variable-latency wireless networks. NTP typically provides accuracies of less than a few milliseconds on wireless networks [25], which is accurate enough for the ECPA algorithm to successfully localize the target.
To evaluate the performance of our systems, we set up the target detection and tracking sensor
networks at two field locations: a vacant parking lot at Auburn University, as shown in Fig. 11 and at AU's National Center for
Asphalt Technologies (NCAT) test tracks. We experimented with several wireless ad-hoc sensor network
configurations: a basic sensor network and camera network configuration, a network with 3 additional wireless network hops from the cluster head to the camera control
node and a network that allows more directions (orientations) for the target to move.

Experimental setup for target tracking in a vacant parking lot at Auburn University.
The ECPA algorithm computes the target location, velocity, and direction of travel based on the CPA time reported from the five sensors. Table 1 summarizes the results of the eight runs that we conducted with two target trajectories. The results show that the target location and velocity can be accurately computed. The average position error is only 1.8 meters, the average velocity error is only 3 mph, and the average trajectory error is 5 degrees. For example in the first run, the predicted target location is (3608558, 641360), only 1 m from the actual location (3608558, 641359). The computed speed is 28 mph whereas the actual speed is 30 mph, and the direction of travel is 90 degrees compared to the actual direction of 87 degrees.
Tests Results

Tests Results
Figure 12 shows the predicted position and actual path of the vehicle for the eight runs in our experiments. Note that the computed target trajectories almost exactly match the actual values. The shorter dashed lines show the results from two runs in the AC direction and two runs in the CA directions. These trajectories are very close to the actual one shown by the solid AC path. The longer dashed lines show the results of two runs in the BD direction and two runs in the DB direction. These trajectories (with one exception) are very close to the actual trajectory.
Plot of target tracking results showing computed target location and velocity match the actual value.
Compared to the results published in [5], the ECPA algorithm gives more accurate results. For example, the average localization error in the ECPA algorithm is 1.78 m; while the root mean square errors of Extended Kalman Filter (EKF), Lateral Inhibition (LAT), and EKF & LAT are 8.877 m, 9.362 m, and 11.306 m, respectively.
To further study the impact of target velocity and location errors on localization and velocity errors, we use an extended ns-2 simulation tool (ns-2.27), from the Naval research laboratory [26]. It provides simulation models for various physical phenomena such as acoustic, seismic, and chemical agents. The presence of physical phenomena in ns-2 is modeled with broadcast packets which are sent over a designated channel called the “phenom” channel. In the real world, detecting acoustic events is made more difficult by the environmental noise and sensitivity issues of the microphones. We assume that the acoustic packets experience a loss profile similar to 802.11 data packets, so the noise and packet losses are simulated by the extensions provided in [27]. In the simulation, we use the same node deployment as was used in the field experiment. As expected, the simulation results with target velocities of 30mph, match the field-test very well.
Successful Localization Rate
Due to the error in measured CPA time, the original CPA algorithm always fail to select the proper ϕ value. In most cases, the CPA algorithm can find r > 0, but after inserting this r into the CPA algorithm, the resulting trajectory is outside the convex hull of the sensors. Thus, the localization process failed. As shown in Fig. 13, the successful detection rate of CPA is at most 10%. Furthermore, when considering the error in a sensor location, the situation becomes even worse. The ECPA algorithm, however, first chooses the ϕ which is closest to the estimated one, and then maps the trajectory into the convex hull of the sensors, thereby achieving a localization success rate of 100%.

Successful Localization Rate of ECPA and CPA Algorithms.
As described in [1], the relative error on the target distance estimate is roughly inversely proportional to the square root of the Mach number. This means the localization error in the ECPA algorithm should also decrease as the target velocity increases. This property is demonstrated in Fig. 14, where the average velocity error decreases from 1.3 m/s to 0.2 m/s, average direction error decreases from 5.5° to 0.5° and the average location error decreases from 1.35 to 0.7 meters. Note that when the target speed is 13 m/s (30mph), the error in estimated location, velocity and direction are 1 m, 1.7 mph and 3.5°, respectively. Indeed, these values are very similar to the errors experienced in the field (Table 1).

Impact of different target velocity on the ECPA algorithm.
Errors in sensor location range from less than one meter to a few meters, depending on the localization technology. To understand the effect of this error, we simulated sensors location error as a uniform distributed function upon (0, max], where max increases from 0.1 to 5 meters. As shown in Fig. 15, when the location error in sensors increases, the target localization error also increases. Interestingly, the ECPA algorithm is highly tolerant of the sensors location error because the estimated target information is quite close to the actual values even with a larger sensor location error. For example, when maximal sensors location error is 5 meters, the average error in target location is only about 1.8 meters. This result matches the mathematical analysis, since Δr ≈ 0.5 · Δr k where Δr k = 2.5 m. Moreover, the error in the estimated velocity and direction are still within the acceptable range (0.8 m/s and 6°).

Impact of sensors location errors on the ECPA algorithm.
To evaluate the impact of different distances between sensors on localization errors, we simulated a set of nodes deployment which covered difference sizes of area in the networks. The area covered by the sensors is defined as the size of convex hull of the sensors. As shown in Fig. 16, when the size of the covered area increases, the errors in calculating the velocity, direction, and position of the mobile target also increase. This is mainly because the longer distance between the sensors and the target trajectory causes huge errors in the measurement of the CPA times. These errors significantly affect the results. As previously stated in our sensitivity analysis of the ECPA algorithm, a larger distance between sensor n0 and n k could generate larger errors in locating the trajectory. This fact is again verified in the simulation results, as shown in Fig. 16c. Although larger distances between sensors could cause some problems, the errors in the computed target velocity, direction, and position are still acceptable (4 m/s, 10° and 4 m, respectively).
Impact of different distance between sensors on the ECPA algorithm.
The original CPA algorithm fails because the uncertainty of sensors position causes it to fail to obtain a positive value of r (distance between a target and the reference node). Our enhanced CPA scheme first estimates the trajectory and obtains the sensors deployment information. Then, it selects the optimal four sensors to minimize the computation error in ϕ with the original CPA algorithm. Finally, the trajectory location is calculated based on the newly computed angle and received signal strength at sensors. Through our field experiments, we have shown that the ECPA algorithm is an efficient and practical localization and tracking method for moving vehicles using wireless sensor networks.
For rapid deployment in the field, we will design new compact sensor fusion nodes based on COTS components (such as PC104), which are small, inexpensive, and can execute collaborative algorithms for reliably detecting and tracking targets. In addition, we will extend the network to multiple clusters to enable us to track targets moving along nonlinear paths. Finally, we will experiment with arbitrary deployment of sensors in random configurations and develop methods for automatically forming clusters in these topologies.
Our prototype target tracking system demonstrates the feasibility of detection, tracking, and image/video capture of moving targets using collaborative, wireless, acoustic sensor nodes. By using the ECPA localization algorithm, the target position, velocity, and direction can be accurately computed and transmitted to the video camera.
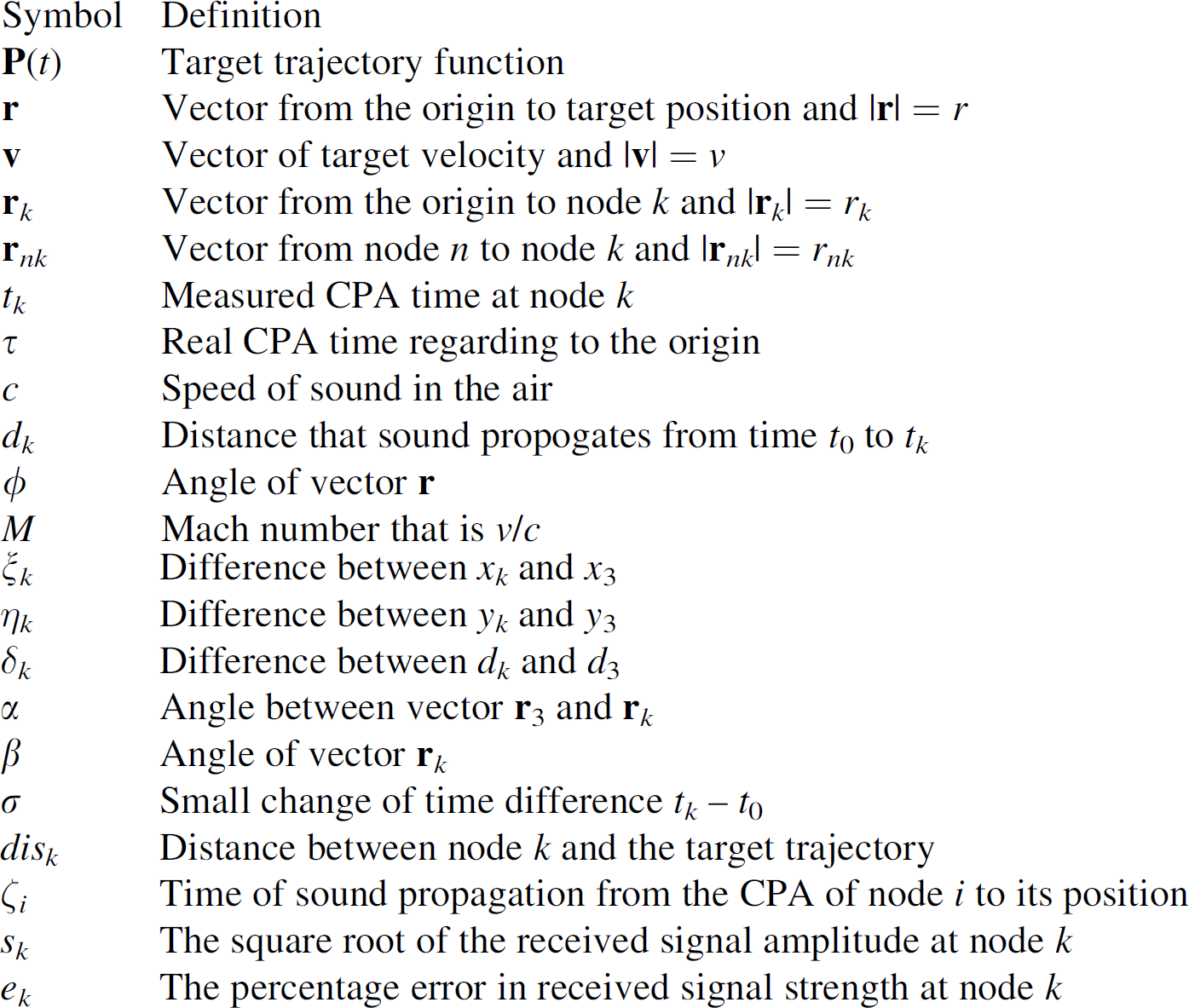
Nomenclature