
Abstract
This article presents a method for dynamic data association in wireless sensor networks and addresses the issue of multiple objects tracking. The sensor node used in this article incorporates RFID reader and an acoustic sensor so that two different signals are cooperating for tracking and associating multiple objects. The RFID tag is used for object identification and an acoustic sensor is used for estimating object movements. In the heterogeneous sensor networks, our proposed association method is analyzed with association success, failure, and recovery cases. In addition, 2-dimensional (2D) particle filtering is used for estimating a objects state such as position and velocity. The performance is compared between a single sensor node and multiple sensor nodes in our proposed algorithm. In addition, the association performance with multiple sensor nodes is evaluated as a function of sampling time and object movement behavior. Finally, the effect of the two heterogeneous sensors range difference is analyzed and discussed.
Introduction
The multiple objects tracking and association have critical problems that arise in a wide variety of contexts such as monitoring people for security purposes in many surveillance areas [1]. Once receiving the unlabeled multiple measurements, the tracking system should match the measurements and tracked objects, which is called an association problem [2]. After the association among measurements and objects, each object state information of position or/and velocity should be estimated even in the noisy environment, which is called a tracking problem [2]. Once the association process is achievable, the tracking can be done with respect to a single object tracking.
For many years, an acoustic sensor based association has been investigated in many tracking applications [3–7]. Two simple approaches are the nearest neighbor filter (NNF) and the strongest neighbor filter (SNF) [2, 8]. In the NNF, the measurement closest to the predicted one is matched and the others are discarded. In the SNF, the signal with the highest intensity among the measurements are matched. While the deterministic approaches are reasonably solving the association problem, they fail in the overlapped cases due to noise sensitivity. In order to make up for the weak point in deterministic decision, the joint probabilistic data association filter (JPDAF) has been proposed [2]. The approach is to use all observed measurements by skipping one-to-one mapping. Furthermore, each measurement has a weight according to each object, and directly estimates the object-state information. However, the estimation is an approximation since each object may be corrupted by other unrelated measurements. In other words, it is difficult to obtain an accurate estimation. As another approach, multiple hypothesis tracking (MHT) is applied in many applications as well [2, 9, 10]. The MHT enumerates or arranges all feasible matching among measurements and objects with probabilities. The approach has an advantage that the mismatching rate may be reduced. On the other hand, it is difficult to implement because a large number of hypotheses may have to be maintained.
Together with the association problem, the object identification problem is also a critical factor in a surveillance system. In order to achieve the identification problem as well as the association problem, several methods are proposed using the range profile [14, 15]. However, the method is only effective for tracking airplanes when the High Resolution Radar (HRR) range-profiles are available. In addition, the HRR is not appropriate to track multiple objects with nonlinear movement as well as in indoor environments. As another approach, the Belief Matrix has been proposed [16, 17] to track aircrafts with improved performances. However, the Bayesian Inference (BI) has identification uncertainty and assumes that prior information is given.
Recently, a RFID system has been considered as a prominent technology to identify multiple objects. The RFID is more vulnerable to the exterior noise than other sensors such as an acoustic sensor and a visual sensor. The system can be classified into two groups; the active and passive system. The active signal has the benefit that the identification information is broadcasted periodically to the receiver by itself and ensures reliability of obtaining information. However, it is not feasible for the surveillance application because of an uncertain lifetime and economical efficiency. On the other hand, the passive RFID system has an efficient solution as it draws the power from the reader [18]. The critical defect of both systems is to provide existence information only; proximity to the reader is supported. Thus, we propose the algorithm to resolve problems by incorporating an acoustic sensor to a RFID reader in wireless sensor networks (WSN). In this article, bearings-only tracking with acoustic sensors is applied for the performance evaluation of our proposed method. The bearings only tracking has been widely used and applied to an extended kalman filter or a particle filter for nonlinear kinetic movement with non-Gaussian measurements uncertainty in many tracking applications [6, 7, 11-13].
The key issue in the proposed method is to provide a robust solution against a plausible association failure. In other words, our method supports false association detection and correction. Based on the association method with a threshold angle, the association correction was introduced in a simple case where objects are not overlapped [19]. In order to have the better performance in the case of overlapping objects, a Sequential Monte Carlo (SMC) technique called particle filter is introduced [20]. The method is used to predict and estimate the object state using the particle filter. In addition, in order to properly associate a Direction of Arrival (DOA) with a tag from a DOA measurement set, the particle filtering is applied with the previous object state information. It improves the threshold angle based association so that an object is easily distinguishable from others. Through the dynamic behavior of objects in deployed sensor networks, we can achieve not only the recovery of the failed association, but also the higher average association rate (AAR). Besides, the range mismatch between two sensors is another problem to make the association difficult. In order to analyze this problem, we model the sensor ranges and classify them into three types. In this article, the factors affecting the association are explained and analyzed in detail. The performance based on a single sensor node is compared with the ones based on multiple sensor nodes. The association performance in multiple sensor nodes is evaluated as a function of sampling time and object movement behavior. Finally, the effect of the mismatch range between two heterogeneous sensors is analyzed and discussed.
The remainder of this article has 5 sections. In Section 2, we present an overview of the sensor node architecture including its required functionalities and limitation. The threshold based method is briefly explained for the association process and the sensor range models are illustrated to explain the possible application for the realistic scenario. Section 3 presents object management methodologies for single sensor and multiple sensors paradigm. In order to resolve the objects overlapping problem, the particle filtering is introduced and the association cases related to the range mismatch are studied. In Section 4, the performance of the algorithms is evaluated in detail. Finally, our contribution is summarized in Section 5.
Application Model and Problem Description
Application Model
Figure 1 illustrates the possible application model with the proposed sensor node. Each sensor node is composed of a microprocessor and peripheral sensors for detecting a RFID tag and an acoustic signal. Each sensor is connected wirelessly in the network model and all situations are controlled by the main server. The multidirectional antenna and the proper frequency are necessary so that they can detect a signal perfectly in their range without loss or collision. We can control the sensing period, Ts, to be small enough so that a change of object position from the previous position is small. The acoustic sensor proposed by [21] is used and the reverberation effect is ignored.

Illustration of the proposed sensor node and application model.
There are two different signals for two main functions in the application model: the RFID signal is used to identify an object and the acoustic signal is to track the object. The conventional association and tracking scheme usually focus on only the tracking except the identification. In a realistic application, however, identifying the tracked object is also one of the main functionalities. The object identification is not trivial only when the acoustic signal is used. Although the speech signature possibly solves the problem, the exterior noise and distortion cause the false or failed identification. In our approach, the RFID signal, which is more reliable than the acoustic signal, is incorporated for the object identification. Besides, this is used to inform the system that the object enters the surveillance region. This can improve the association performance when the acoustic signal based tracking is failed. The main purpose of our method is to identify tracked objects and recover it when the tracking fails using two different passive sensors. In this article, when we find a RFID signal of an object, which corresponds to a DOA of the object, it is called “associated.” If a DOA is updated from the previous DOA for an object, it is called “tracked.”
An object of interest generates a consistently differentiable sound when it moves at maximum
constant speed and has a problem, the particle filtering is introduced and an association unique
tag. We define

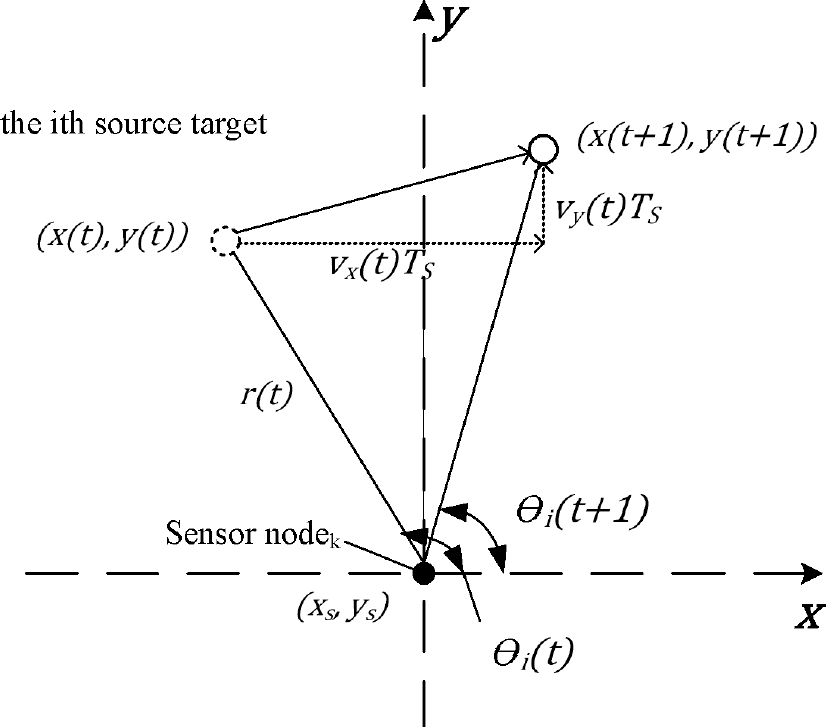
Illustration of geometry for the moving object in Sensor Node k.
When the maximum constant speed is assumed for each object, the threshold angle based association
method can be used [19]. The threshold
angle is obtained by


Otherwise, let TAG(t) = {tag1(t),
tag2(t),…, tag
L
(t)}
denote a measurement of the tag information at time t. If there is a pair of
tag
l
(t) and
a
j
(t) which satisfy the following conditions,

The important factor for causing the association error between a RFID tag and a DOA is the range difference between the RFID sensor and an acoustic sensor. The proposed sensor node has two sensing ranges corresponding to each sensor. The first range is determined by the RFID sensor and the second is determined by the acoustic sensor. We assume that the sensor range can be adjusted by controlling the power of the sensor. The range affects the number of the detected signals. If two sensor ranges are different, two different sets of the detected signals are obtained in a sensor node. We can classify the range model into three types relating to the number of detected signals.
Type 1 Simple Model
This model assumes that the range of two sensors is identical and L is equal to J as shown in Fig. 3. For simplicity, two ranges for a sensor node are modeled as a circle with the same radius. The proposed tracking and association method is verified using this model.

Illustration of simple range model assuming that range of two sensors is circular and identical.
The range for a RFID sensor and an acoustic sensor is not usually circular and identical as shown in Fig. 4. If these two ranges do not coincide with one another, L is not equal to J. Although the deviated model can be used for a RFID sensor and an acoustic sensor, their range size needs to be consistent to maximize the result of the proposed method. That is, if one sensor range is broader than another, this is satisfied in all parts of the range. An irregular range shape does not make the association and tracking difficult because we can measure the sensing range. Thus, the simple circular model can be used for simplicity, assuming that the range is almost time invariant. The problem arises when the difference of the two ranges is too large. Especially, when an acoustic sensor range is broader than an RFDI sensor range, the number of multiple objects with a similar DOA increases. This can cause a false or a failed association. In order to resolve this problem, the controlled range is required to make them similar.

Illustration of a deviated range model that range of two sensors is not identical and uniform.
In reality, the range of an RFID sensor is not as broad as that of an acoustic sensor, as illustrated in Fig. 5. The range of an acoustic sensor should be adjusted to be similar to that on an RFID sensor as maintaining the range consistency. Since the RFID sensor range is small, we need to install more sensor nodes to cover the tracked region. However, this can improve the tracking and association performance. The realistic scenario, as well as the effect of the range mismatch, is evaluated in Section 4.

Illustration of realistic range model that the range of an RFID sensor is smaller than that of an acoustic sensor.
There can be one more model for a purely random range which is not controlled at all. However, we do not consider it to be applied to our proposed association and tracking method.
The object management methodology can be explained by comparing a single sensor node model with multiple sensor nodes model. In a single sensor node model, the initial information about the location and association should be ensured. Because only the one sensor node exists, the association recovery using entering the range of a sensor node is barely possible. On the other hand, in multiple sensor nodes, the new association can be initiated more frequently.
Association in Single Sensor Model
The priority condition for association and tracking is to ensure that only one object satisfies (3). If the objects are obviously separate, it is easy to continue tracking among measurements. The association and tracking problems appear when objects have similar DOAs. In order to resolve this problem, we need more information such as the object motion model. This can abate the overlapping problem with the particle filtering.
Introduction of Particle Filtering
The 2D multiple objects state is expressed as:

where (x i (t), y i (t)) represents a position of the i th object, and (v x,i (t)) represents a velocity of the i th object.
The state of the i
th
object evolves as the
following:

where

where
In order to estimate a object state, dynamic prediction probability density function (PDF) is
obtained as expressed in [22].

For the next time-instant estimation, posterior PDF involving prediction PDF is obtained via the
Bayes' rule as

Since the recurrence relations (7) and (8) cannot be determined analytically in general, the particle filter has been widely adopted to represent probability densities as point mass or particles [22].
The benefit of the particle filtering for the prediction is to consider an object model. Thus,
the prediction is more accurate than that of the deterministic method using the maximum constant
speed. It is assumed that the behavior model of detected objects or tags is known at the time
instant. We apply the particle filtering with the previous velocity in order to predict the next
measurement. Figure 6 illustrates two
objects, O
α
and
O
β
, and the generated particles with respect to
models a and β. The Model α and
β particles are generated corresponding to
O
α
and
O
β
, and the prediction of
a1 and a2 is performed based on particles
weight. Then, we obtain the predicted angle using the predicted state. The state vector is expressed
as



Illustration of particles corresponding to each model.
The predicted angle has the tolerance error
(θ
err
) under the error caused by the noise as
shown in Fig. 7. We can adjust
θ
err
according to the degree of the noise. In
order to increase the association rate, the tolerance error can be set large enough, but this may
cause the association failure when objects overlap. It is also highly dependent on the object
behavior. In the equations for association, θ
err
is substituted for the threshold angle, θ
th,i
and they are changed as follows.


Illustration of overlapping model when the particle filtering is used or not. (a) Without particle filtering and (b) with particle filtering.
Otherwise, the equation for the association is

As shown in Fig. 7,
θ
err
is much smaller than
θ
th
and the particle filtering gives the more
reliable prediction about the object movement. The overlapping model with the particle filtering
decreases the possibility of the association failure. However, it still has the case that the
association fails when similar measurements exist. Despite the association failure, we can force
them to associate with one of the similar measurements which has the highest probability in order to
increase the average association rate (AAR). That is, the false association that a DOA of an object
is associated with a tag of the other object and vice versa. For the method to choose one DOA among
candidates satisfying (11), we can use the maximum likelihood principle based on an object model. The DOA which
has the minimum difference with the predicted angle is associated. Each object has the candidate set
S composed of the DOA element satisfying (11). The set which has the probability for each
candidate is defined by

A DOA, sm, associated with an object is evaluated in the following equation.
For T ag
i
or
O
i
,


Figure 8 shows two possible association cases depending on the prediction strategy. The dashed line is the real trajectory and the circle means to be associated successfully and the solid line is the estimated trajectory based on the associated measurement. When the particle filtering is not used for the prediction, the threshold becomes deterministic and the overlapped objects fail in association as shown in Fig. 8a. On the other hand, Fig. 8b shows the probabilistic approach with the particle filtering. They are successfully associated by using (14) and (15). The triangle represents the false association and the black line is the estimated trajectory based on the predicted measurement. The false association occurs when objects have the similar DOAs. Although their position is similar in overlapping, the estimated position from the false association connects the current state to the next state because the prediction is based on the object model. Hence false association does not propagate the next time after they fall apart.

Illustration of failed and false association.
As the tolerance error (i.e., θ err ) increases, the number of the false association increases. In these particular trajectory of objects with the noise variance 0.1, the false association rates are increased as the tolerance angle gets larger as shown in Fig. 9. However, it rarely affects the estimation with false association when the model certainty is ensured and objects do not exist on the similar line of sight. Thus, the model uncertainty is considered as a factor, which affects the estimation when the particle filtering is used.

(a) False association rate in terms of the tolerance angle. (b) The average RMS position error of (a).
Before we develop further to the multiple sensor nodes, the establishment of the state of a recovered object should be explained.
Establishment of State
In order to predict or estimate the state through particle filtering, a previous state should be
known. When the association of an object is recovered, it requires the establishment of state. If we
assume that the state of a new object is known, there are two cases which need the establishment
process. The association is recovered when one DOA and one tag remain. The association is recovered when an object crosses the boundary.
For both cases, the particle filtering is applied to estimate the position and velocity during the unassociated time period. In the multiple sensors model, another advantage is that there are objects tracked by more than two sensor nodes in addition to the increment of association successful cases. We can have another case that an object can be covered by another sensor node. Although it is not the case that a DOA is registered to initiate or recover association, this is the supplementary case to provide other DOAs against association failure in a sensor node. Figure 10 illustrates that the association result can be recovered due to multiple boundaries. For instance, after O1, O2, and O3 overlap and the association fails, O1 and O2 are recovered in the association through entering another region. In contrast to the single sensor node, it can recover association failure and increase the average association rate (AAR). Also, the AAT can be increased as the time goes by, since the number of crossover of objects is proportional to the time.
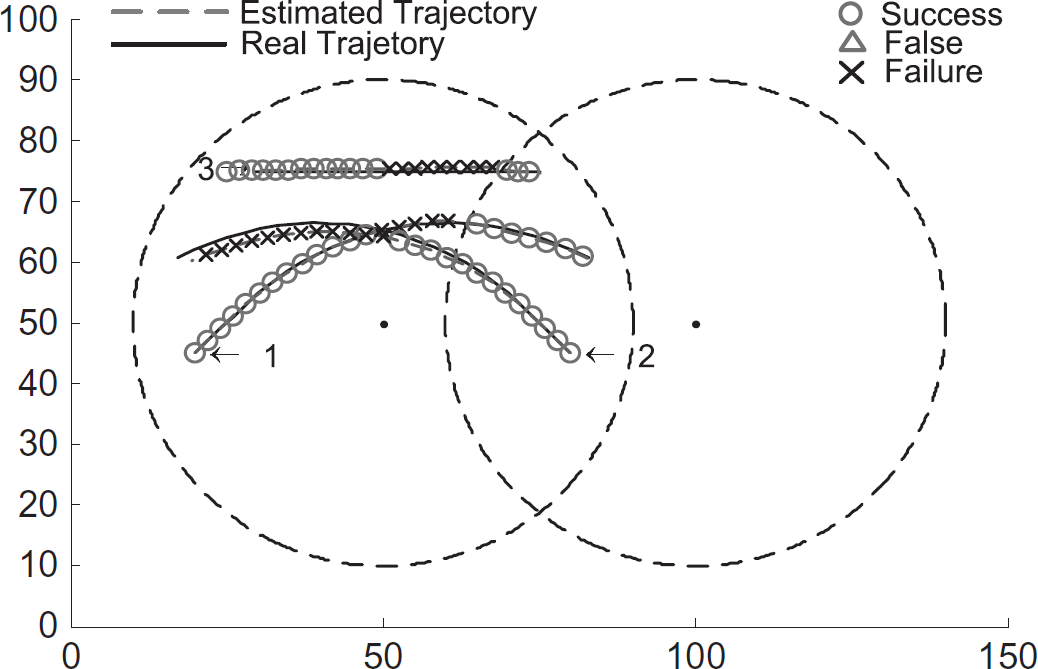
Association recovery using the multiple sensor node.
In this section, we describe the proposed algorithm without or with the particle filtering. When
the particle filtering is applied to the process, the position of the object is estimated using the
associated DOA. The state vector is the same as the previous one used in prediction. The estimated
information is used to predict the next state again. The association cases are summarized in the
following [20]. Case 1: When the previous association is known, the one DOA is included in the expected angle of
an object that the sum of the predicted angle and the angle error - (11). Case 2: If one pair of an unassociated tag and DOA is detected in the region when the rest of the
objects are associated, it can be automatically associated; this is called unique -
(12). Case 3: In the common area of sensor nodes, a DOA can be registered for an object in a sensor
node using the information obtained from being associated in other sensor nodes -Multiple sensor
nodes model only.
Without the Particle Filtering
When the particle filtering is not used and the maximum constant speed is applied to each object, the algorithm has three steps as shown in Fig. 11a; collecting information, registering possible DOAs which can be associated with each object, and choosing one of them. In both the single sensor node and the multiple sensor nodes, each node collects data: tags and DOAs of objects are shown in Fig. 12. The single sensor node has only one table for the single node and the multiple sensor nodes have tables as many as the number of sensor nodes. The information of these tables is wirelessly transferred to the main server through the network, and the server registers DOAs satisfying the above association cases for each object.
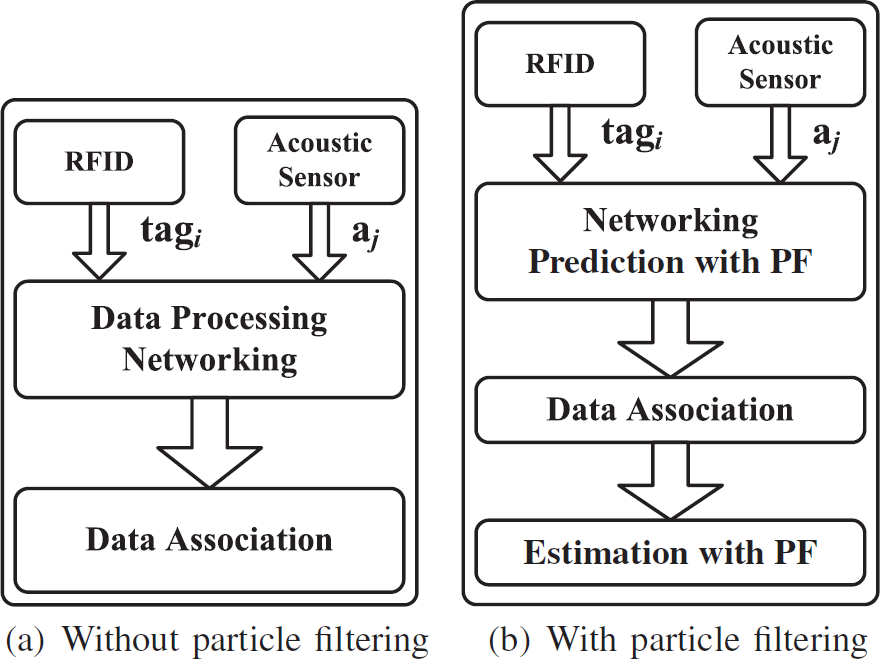
Illustration of the data process flow when the particle filtering is used or not.

The table generated by each sensor node.
Figure 13a shows the registered possible DOAs where each object has in each node. If an object moves around the overlapped region by more than two sensor nodes, an object may have multiple candidate DOAs obtained by each sensor node as long as they are satisfied with the above cases. If a DOA and a tag are registered as candidates in the table, the system indicates them using the “check” column in the table for a sensor node.
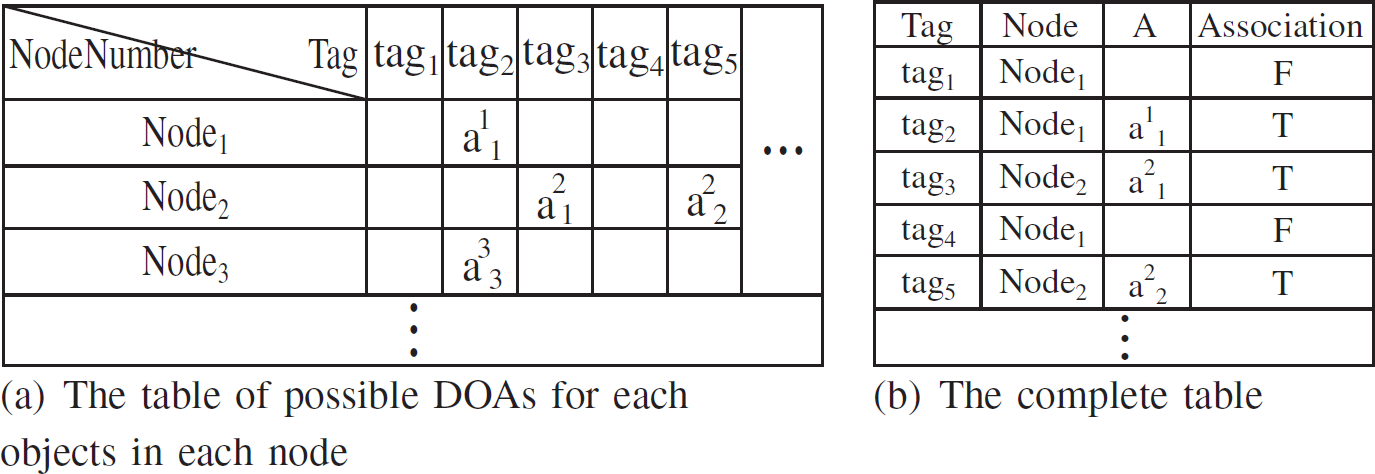
The generated table for association process. (a) The table of possible DOAs for each. (b) The complete table objects in each node.
Finally, the main server chooses one of possible DOAs for each object among possible DOAs in the table. In the case that several candidates exist for an object, one DOA can be selected in a way that it balances the load for a sensor node. However, the load balancing is not considered in this article and we simply select one DOA, which is in the lowest number of a sensor node among the candidates. Finally, it creates a complete table that shows whether each object association succeeds or not as shown in Fig. 13b. These steps are repeated continuously in the main server at every sampling time. The algorithm is summarized in Algorithm 1.

The algorithm without particle filtering
When the particle filtering is used, the basic process flow is the same as before, but the prediction and estimation stages with the particle filtering are added to the previous algorithm as shown in Fig. 11b. After the table for possible DOAs is updated, the semiestimation using possible DOAs is required in order to give the position information used to add other possible DOAs in the common area. Before and after the stage the system checks if there is a pair of an unassociated tag and DOA.
Range Mismatch
There are two cases for the range mismatch assuming that the overlapped region exists in each sensor range because two different sensors are used: the range of a RFID sensor is broader than that of an acoustic sensor and vice versa. In both cases, the problem is to initialize the association when the model certainty is guaranteed with the particle filtering. When a new signal is detected in the smaller range among two sensors, the initialization of the association is triggered.
The scenario, where the range of the RFID sensor is broader than that of the RFID sensor, is
shown in Fig. 14. The scenario triggers
the association process when the number of detected DOAs changes. The condition for the new
association is that only one pair of the unassociated RFID tag and DOA exists (Case 2). In the
unmatched model, however, the possibility of having the case decreases. While
O1 enters the region of an acoustic sensor,
O2 enters the region of the RFID sensor in one sensor node. Then,
O1 loses uniqueness and fails in initializing the new association. For
the method to make this case successful in the association, the system checks whether the RFID tag
to be associated exists in the previous sampling time because it should be detected by the RFID
sensor in advance of entering the range of the acoustic sensor. The algorithm with particle filtering

The example when the range of an RFID sensor is larger than the range of an acoustic sensor.
Another scenario is that the range of the acoustic sensor is broader than that of the RFID sensor. The similar approach is possible for association. The RFID sensor which has the smaller sensing range triggers the association process. However, the DOA is variable every sampling time contrary to a RFID tag and it is hard to prove that a DOA is detected before. For example, O2 can be indistinguishable with O1 as shown in Fig. 15. This scenario is close to reality since the range of a RFID sensor is usually smaller than that of an acoustic sensor. The best solution to minimize the problem is to decrease the range difference between two sensor range. In section 4 the effect of the range difference is simulated and analyzed.

The example when the range of an acoustic sensor is larger than the range of an RFID sensor.
For a performance analysis, Matlab is used, and each sensor node position and sensing range are known. In addition, the initial information such as the position and the velocity with the RFID tag is given to the system.
Association Performance
Figure 16 is a simple tracking scenario. The number of sensor nodes and sensor sampling time are mainly considered and analyzed. In this scenario, the estimation with the particle filtering and false association are not considered so that the effect of other parameters can be observed. It is assumed that the range of two sensors is identical and circular to verify the association initiation and recovery. For simplicity, the size of the sensor range is controlled, and the maximum constant speed is 2 m/s. The circle on the line represents successful association.
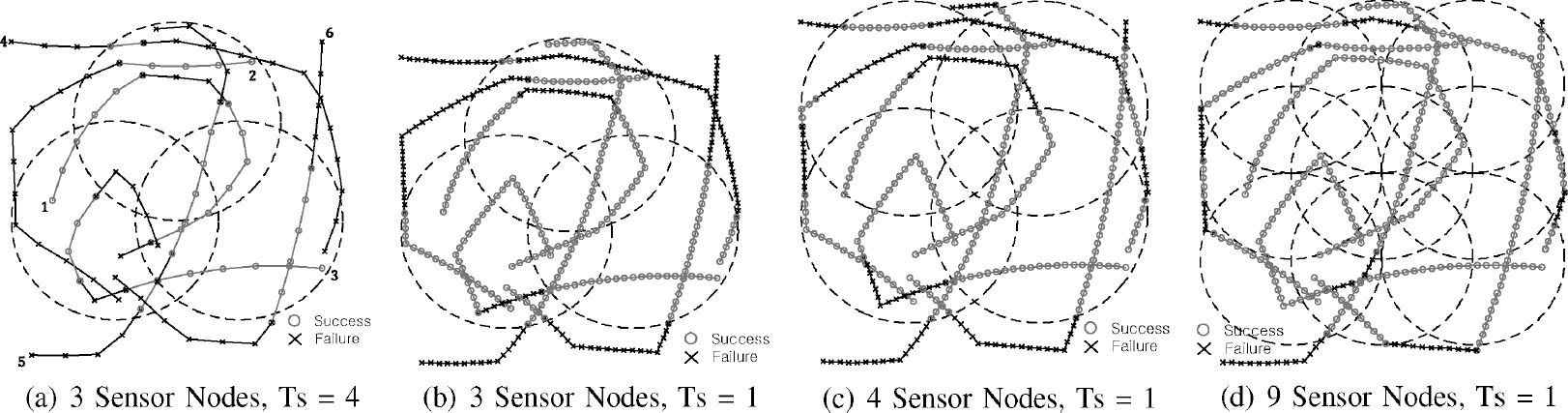
Illustration of several tracking scenarios.
In order to compare the results, we define metrics, Association Life Time (ALT) and Mean
Association Time (MAT) denoted as τ
ALT
and
τ
MAT
. They are defined as follows,



Illustration of the ALT (a-c) and the MAT (d-f) according to the sampling time and the number of sensor nodeds.
Figure 18 shows the average association rate (AAR) corresponding to the sample time and the number of sensor nodes. The AAR usually increases proportionally to the sampling time and the number of sensor nodes because they increase the case for uniqueness. If the particle filtering is used for this simulation, the more higher association rate is achieved because the overlapping problem is reduced.
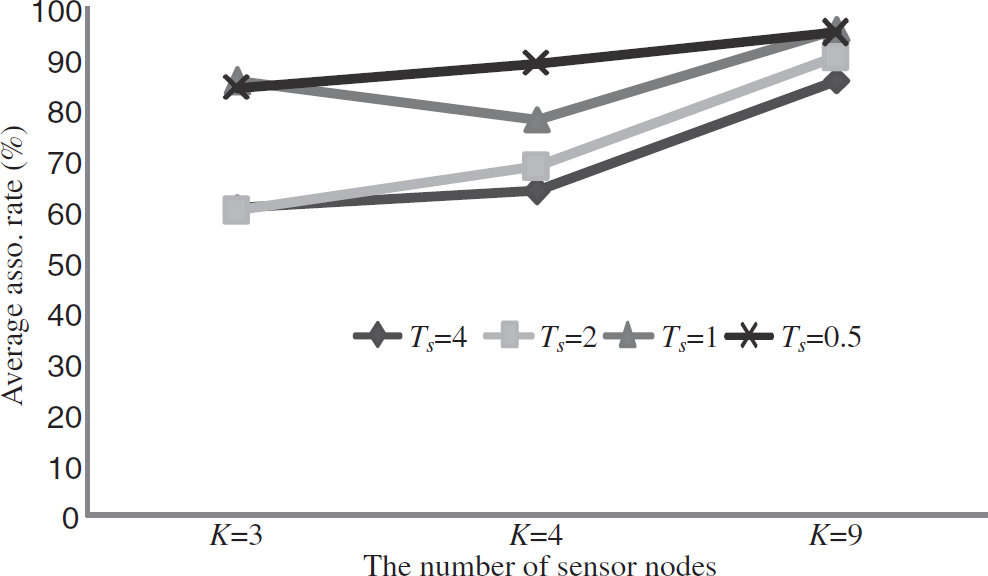
Average association rate according to the sampling period and number of sensor nodes.
The sampling time is 1 second and the total tracked time is 36 seconds. Since a sensor range can
be measured, we use the circular model for simplicity as illustrated in Fig. 19. It is assumed that the initial position and velocity
of objects are given when each object enters a gate. The sensor node position as well as the range
are known as well. In this scenario, the initial state of objects is following in the format
{x, y, vx, vy}. O1 = {0, 8, 1.1, −0.05} O2 = {36, 6, −1.2, 0} O3 = {43, 3, −1.2, 0.01} O4 = {40, 2, −1, −0.01}
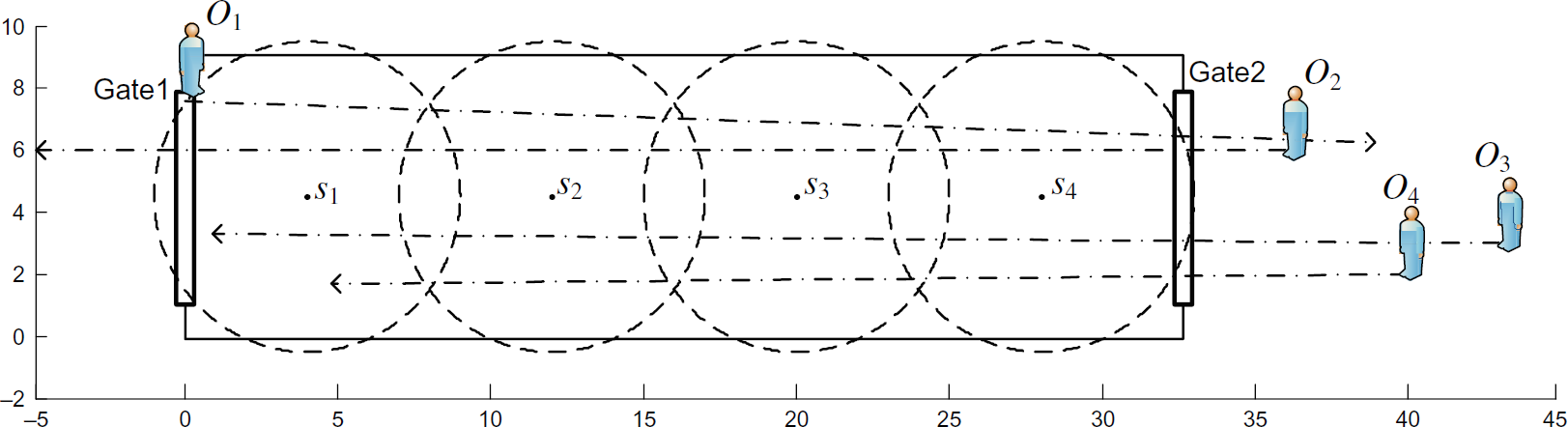
The virtual environment for the realistic scenario where four targets, two gates, and four sensor nodes exist.
The sensor node information is given in the format {x, t, radius} as follows:
s1 = {4, 4.5, 5} s2 = {12, 4.5, 5} s3 = {20, 4.5, 5} s4 = {28, 4.5, 5}
where the unit is the meter.
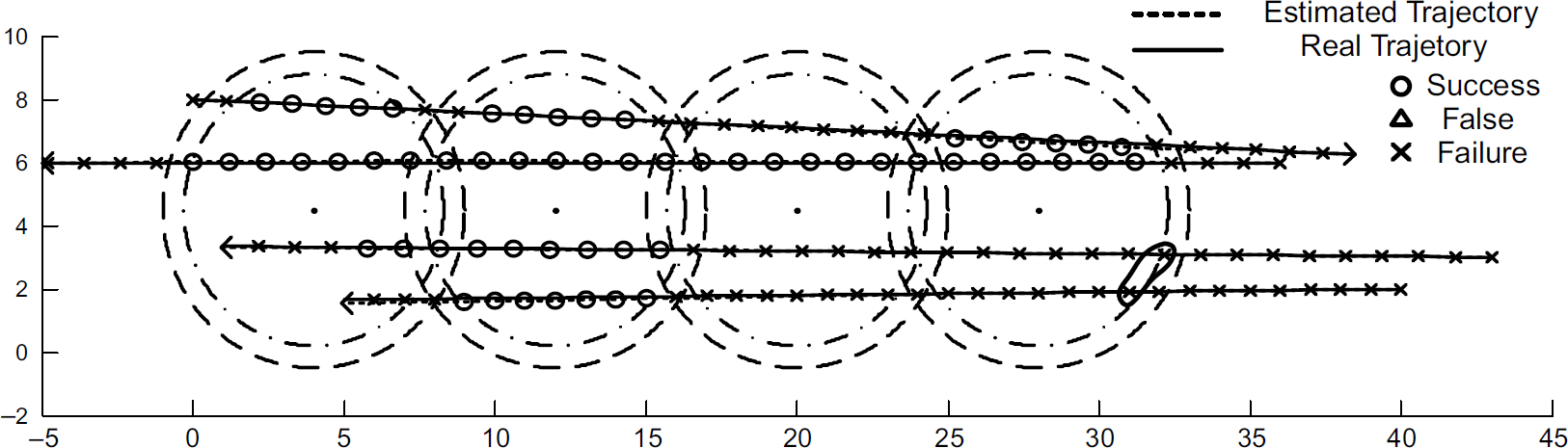
In order to verify the algorithm, the threshold based method without the particle filtering is applied first. As shown in Fig. 20, a DOA and RFID tag of an object can be re-associated when an object enters the sensor node range; the re-associated period is indicated by the left right arrow. Only if an acoustic sensor is used for tracking, it is not trivial to figure out whether an object enters the sensor node range because of the variability of the data. For example, O3 and O4 usually have similar DOAs. Although the position and the velocity are known, it is not easy to find the corresponding DOA for the object after its data is disassociated. However, the RFID tag of O3 informs the system that it enters s2. Then, the system finds the corresponding DOA for O3 using uniqueness.

The simulation result when the maximum speed for an object is used to obtain the threshold angle.
As shown in Fig. 12a, the overlapping problem is reduced with the particle filtering on the contrary to the previous result. In this simulation, the tolerance error is 1.5°, and the number of particles is 100 with the weight function variance 0.01. The noise variance for a DOA is also 0.01. The constant velocity model is used for an object model. Although the false association occurs during the overlapping interval, it is just the instant phenomenon. However, the association is deteriorated when the noise is severe as shown in Fig. 21b. We can still confirm that the object is re-associated and re-tracked.

The simulation result when the particle filtering is applied for prediction and estimation.
In reality, we cannot ignore the range mismatch problem between two different sensors. Considering the real range of a RFID sensor, the RFID sensor range is normally smaller than an acoustic sensor range. In order to analyze the effect of the range difference, we assume that the range of a RFID sensor is smaller than that of an acoustic sensor.
As shown in Fig. 22, the smaller range is the RFID sensor range. The range difference makes two different number of detected sets for each RFID tag and DOA. Since the number of detected DOAs is larger than the number of the detected tags in a sensor node, it causes a new association to decrease when an object enters a sensor node. For example, at t = 10, the tag of O4 is detected, but two DOAs for O3 and O4 are also detected. It is indicated by the red thick line at the tenth sampling time. Thus, the association of O4 is not achieved because it cannot satisfy the condition for the uniqueness. However, we can check that the association recovery still exists using the condition for the uniqueness.
The simulation result when the range of two sensors is different (the radius of the RFID sensor range: 4.3 m, the radius of the acoustic sensor range: 5 m; the circled area is at t = 10).
Figure 23a shows the association result according to the range difference. Since the particle filtering is applied and the result is a little bit different at every execution, we executed ten times for each range difference and averaged them. The noise variance for a DOA is 0.01. The larger the difference in the range, the more the average association rate decreases. The variance for the AAR tends to increase. Figure 23b shows the false association rate according to the range differences. As the range difference increases, the false association rate tends to increase because the number of a similar DOA increases. When the AAR is small with the range difference 0.7 m, the false association rate is small as well. Therefore, the minimum range difference is required for the best tracking and association performance.

The performance analysis according to the range difference.
This article presents the object association method based on the proposed sensor node architecture for multiple objects tracking and management in wireless sensor network. The sensor node incorporates the RFID tagging unit for identifying multiple objects and acoustic sensor for tracking them in realtime. This method enables the system to track and identify objects at the same time. Moreover, the appearance of an object in the sensing range is utilized for establishing or recovering the association. We introduce the particle filtering to resolve when they are at the similar line of sight from the sensor node. As the noise variance of DOA increases, the association performance is deteriorated. We also verify the proposed method under the range mismatch. The simulation result indicates that the minimum range difference is required for the best tracking and association performance. For the future work, we will investigate the effect of synchronization issue between sensors.