
Abstract
This article presents an algorithm for adaptive sensor activity scheduling (A-SAS) in distributed sensor networks to enable detection and dynamic footprint tracking of spatial-temporal events. The sensor network is modeled as a Markov random field on a graph, where concepts of Statistical Mechanics are employed to stochastically activate the sensor nodes. Using an Ising-like formulation, the sleep and wake modes of a sensor node are modeled as spins with ferromagnetic neighborhood interactions; and clique potentials are defined to characterize the node behavior. Individual sensor nodes are designed to make local probabilistic decisions based on the most recently sensed parameters and the expected behavior of their neighbors. These local decisions evolve to globally meaningful ensemble behaviors of the sensor network to adaptively organize for event detection and tracking. The proposed algorithm naturally leads to a distributed implementation without the need for a centralized control. The A-SAS algorithm has been validated for resource-aware target tracking on a simulated sensor field of 600 nodes.
Keywords
Introduction
Recent advances in the technologies of microcomputers and wireless communications have enabled usage of inexpensive and miniaturized sensor nodes [1–3] that can be densely deployed in both benign and harsh environments as a sensor network for various applications. Distributed sensor networks have been built for both military (e.g., target tracking in urban terrain) and commercial (e.g., weather, habitat and pollution monitoring, and structural health monitoring) applications [4–8]. Sensor network operations can be broadly classified as:
data collection, and event detection and tracking.
Effective use of sensor networks requires resource-aware operation; once deployed, energy sources of sensor nodes can seldom be replenished. When used for data collection applications, sensor nodes are often operated on very low duty cycles (e.g., less than 1% [6]) to achieve appreciable operational lifetimes. Although several methods and design principles for power-aware communication and networking have been reported in recent literature [9, 10], the resulting communication strategies are more useful for low duty-cycle data collection applications because communication is the main source of energy consumption. Therefore, these methods may not be sufficient if the cost of sensing becomes significant relative to the cost of communications.
Sensor networks for event detection and tracking may not be able to afford a fixed low duty-cycle operation because events of interest are often rare and unpredictable. Therefore, sensor nodes need to be omni-active (i.e., (almost) always active), which makes the sensing task a significant contributor to the energy costs. A naive solution to this problem is to have a high duty cycle to achieve appreciable detection probability. Alternatively, a more sophisticated hierarchical approach (e.g., passive vigilance) may maintain a selected low-power sensor omni-active to trigger, as necessary, more energy-expensive sensors that are kept in standby modes [11]. This concept is valid if event detection is possible based only on the omni-active low-power sensor and the remaining sensors are required for further classification of the event/target. In many cases, successful event detection may require a high-power sensor or a combination of multiple sensors to be omni-active. An example is a combination of a low-power infrared sensor for line of sight together with audio and magnetic sensors for target tracking in an obstructed environment. However, such a configuration would significantly increase the power consumption. Energy costs for sensing are further aggravated and may prohibit continuous operation if active sensors (e.g., radio detection and ranging (radar) sensors [12]) are in use. In one such application, Arora et. al. [13] have used wireless sensor nodes equipped with a magnetometer and a micropower radar for detection and tracking on an experimental facility.
This paper presents an innovative algorithm to enable resource-aware operation for event detection and tracking. An adaptive sensor activity scheduling (A-SAS) algorithm is formulated based on the concepts drawn from Statistical Mechanics and random fields on graphs. The proposed A-SAS algorithm naturally leads to a distributed implementation on a sensor network and thus eliminates the need for a centralized control for sensor activity scheduling.
The rest of the paper is organized as follows. Section 2 provides the rationale and motivation for the presented work. The underlying problem is formulated in Section 3 and Section 4 presents the details of the methodology. Section 5 validates the proposed concept on a simulation test bed consisting of 600 sensor nodes. The paper is summarized and concluded with recommendations for future work in Section 6. Appendix A briefly introduces the measure-theoretic concept of a random field that has been used in the main body of the paper. Appendix B presents a comparison of Markov and Gibbs random fields.
Recent literature in physics and related sciences suggests that there has been an increased interest in the interdisciplinary field of complex networks—found in diverse areas such as computer networks, sensor networks, social networks, biology, and chemistry. The unifying characteristic across various disciplines has been the fact that systems such as the internet and sensor networks can be described as a network of interacting complex dynamical systems. The major challenge while addressing the common issues in these systems is their high dimensionality and complex topological structures. This area has been traditionally investigated by using graph theory but recent work shows that tools of Statistical Mechanics facilitate understanding and modeling of the complex organizational characteristics in real-world complex networks. For example, by mapping nodes of a graph to energy levels and edges as particles occupying that energy level, Bianconi and Barabasi [14] have shown that complex networks follow Bose statistics and might undergo Bose-Einstein condensation despite their irreversible and non-equilibrium nature. In another article [15], Reichardt and Bornholdt have presented a fast community detection algorithm using a q-state Potts model. A detailed review of articles in this area can be found in [16, 17]. In this respect, the role played by Statistical Mechanics can be two-fold:
Understanding the topological structures behind the multitude of networks, found in many real systems, whose structures lie in between a totally ordered one and completely disordered. Construction of algorithms, based on the above understanding, for control of local behaviors that through mutual interaction yield desired ensemble characteristics from a global perspective.
One of the important issues in the area of sensor networks is the judicious re-distribution of available resources such as energy and communication bandwidth. This paper makes use of the concepts of Statistical Mechanics and Markov Random Fields to formulate an Ising-like model of the sensor network. Ising's ferromagnetic spin model [18] has been used to study critical phenomena (e.g., spontaneous magnetization) in various systems. For example, its ability to model local and global influences on constituting units that make a binary choice (±1) has been shown to characterize the behavior of systems in diverse disciplines other than Statistical Mechanics, e.g., finance [19], biology [20], and sociophysics [21]. Markov random fields have been traditionally used for image processing [22], but their application to sensor networks [23], however, is a relatively new approach.
In this paper, a sensor network is modeled as a set of interacting nodes, where each node is modeled as a random variable with two states—active and inactive. A Hamiltonian based on clique potentials is constructed to model neighborhood interactions and time-dependent external influences. A sensor node recursively predicts the likelihood of being active or inactive based on perceived neighborhood influence and its most recently sensed parameters. Based on this likelihood, a sensor node probabilistically activates/deactivates itself while making only partial observations. Following the dynamics of a Markov random process, every sensor node makes local decisions that result in meaningful ensemble behaviors of the sensor network. This property is analogous to several multi-component systems such as those in finance and biology, where the collective behavior of the system emerges from the local decisions of interacting individual units that comprise it [24].
The problem addressed in this paper is to formulate a distributed algorithm for a sensor network to enable resource-aware detection and tracking of rare and random events. The task is to device entities (sensor nodes) that make local decisions leading to meaningful emergent behaviors of the sensor network. The sensor nodes are assumed to be equipped with relevant sensing transducers and data processing algorithms as needed for detection and tracking of events under consideration. Events (e.g., appearance of a target) occur in the sensor field at unpredictable locations and time instants, the task of the sensor network is to enable event detection and tracking while conserving resources. Sensor nodes can communicate with their nearest neighbors through single-hop wireless communications. The following assumptions are made to isolate the problem considered in this paper from other issues of a sensor network.
Once deployed, the nodes can localize themselves and discover their nearest neighbors. The sensor nodes considered are static. For a mobile or a hybrid (i.e., static + mobile)sensor network, periodic localization, and neighbor discovery would be required. Any communication to the data sink is handled by a dynamically selected cluster head [25] (see Algorithm 2 later in Section 5-B). Cluster heads talk to the data sink using short single-hop transmissions sending only filtered and fused information. It must be noted that this communication scheme is only a simplifying assumption and the proposed algorithm does not prohibit multi-hop transmission by the cluster head to the data sink. Time synchronization is imperfect.
The accuracy of time synchronization is dictated solely by the required accuracy of event localization and the data aggregation for detection and tracking. Although interesting and challenging in their own right, issues such as localization, routing, and time synchronization in sensor networks are beyond the scope of this paper. An encompassing approach that factors in the details of all issues related to a sensor network is a topic of further research.
This section develops an algorithm of adaptive sensor activity scheduling (A-SAS) in distributed sensor networks, where the sensor network is modeled as a Markov random field on a graph. The sleep and wake modes of a sensor node are modeled as spins with ferromagnetic neighborhood interactions in the Statistical Mechanics setting.
Framework and Notations
This sub-section presents framework and notations that are used in further formulation. The sensor network is represented as a weighted graph. The choice of this framework is useful as it allows to model and utilize the dependence structure in a sensor network.
Let
It is noted that the graph
Random Fields on Graphs
Let

where the random variable

with
Definition 4.1 (Markov Random Field). Let Positivity: Markov Property:
where
The first condition of positivity in Definition 4.1 ensures that the conditional probabilities P(ω
i
|
Definition 4.2 (Gibbs Random Field). A random field

where

is the partition function and β is the inverse temperature in the thermodynamic analogy.
For an uncountable Ω, the partition function Z N becomes an integral, instead of the sum in Equation (4) for which Ω is finite or countably infinite. Moreover, for a countably infinite or an uncountable Ω, Z N is defined only when the sum (or integral) in Equation (4) is finite [29]
Definition 4.3. A node set c ⊆ S is called a clique if the graph induced by
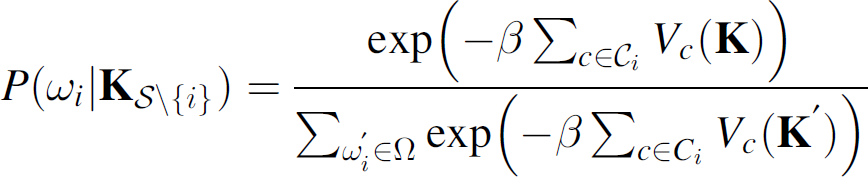
Definition 4.4. The Hamiltonian or the energy function for a configuration

where V
c
is the potential of a clique c; and C is the set of all cliques for graph
It is noteworthy that a Markov random field evolves as a localized process with neighborhood interactions only (i.e., Markov condition). In contrast, Gibbs random field describes global behavior relying on the joint probability measure P(
This subsection formulates the Ising model of a sensor network, which is represented as a Markov random field on a graph
A sensor s
i
is represented as a function
The state (or label) set is chosen to be discrete with Ω = {active, inactive}. The random field

with
The clique potentials are defined as

where |c| is the cardinality of the clique c;
Cliques of size more than two would require keeping track of neighbors of neighbors, which becomes cumbersome for a large |c|. Therefore, from the implementation perspective, cliques with size greater than 2 are not considered in this formulation and hence V c = 0 for |c| > 2. However, higher order cliques potentials are necessary in some scenarios for more complex sensor network behaviors; this is a topic of future research.
The Hamiltonian that represents the energy of a configuration

where, in the Ising-model analogy,
For a given configuration
where C
i
is the set of all cliques that contain the node s
i
; and
Let ΔH(σ
i
) be the change in energy as a node s
i
changes its state from σ
i
→ − σ
i
. Then,

Let

It follows from Equation (11) that ΔH(σ i ) = − ΔH(−σ i ), i.e., ΔH is an odd function of σ i .
Setting

Both Equations (9) and (12) imply that P(ω
i
|
Equations (12) and (11) together highlight the coupled nature of the node state probabilities as:

It is seen from Equation (13) that the probability of being active
The fixed point of the system determines the normal or usual operation characteristics of the system, i.e., when there are no events in the sensor field (μ i = 0 ∀ i ). Thus, for a sensor network application, the ability to choose p∗ would be desirable. For a given 0 < p∗ < 1, this is accomplished as follows.
Let us define the clique potentials as:

where
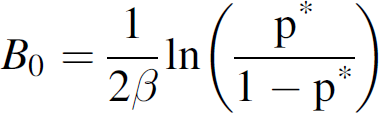
and

and the sensor network system has a fixed point at p∗ for μ
i
= 0∀
i
. In this model, a sensor node is allowed to make its local decisions based on its sensed parameters (μ
i
) and the change
The formulation presented here essentially follows a hybrid model [34] where the clique potentials and hence the probabilities are functions of both a discrete variable (σ
i
) and a continuous variable
The schematic view in Fig. 1 represents a sensor network with orthogonal nearest neighbors. The network is perceived as a collection of interacting probabilistic finite state automata (PFSA). To adapt to the dynamic operational environment, sensors nodes recursively compute their state probabilities based on their neighborhood interactions and most recently sensed data. Although only two states (i.e., active and inactive) have been considered for each node, the formulation is extendable to a larger number of states (e.g., with a Potts model representation [18]) and is a topic of future research.

Sensor Field with sensor nodes represented as a probabilistic finite state automaton (PFSA) (magnified) with two states - Active (+1) and Inactive (−1), with p a and (1 − p a ) as respective state probabilities.
Tests have been conducted on a simulated sensor field to demonstrate and validate the performance of the methodology presented above. The sensor field is simulated as a two-dimensional array of sensor nodes (like TelosB or MICAz [1, 2]). The sensor field consists of 600 (20 × 30) nodes which are placed in a uniform grid. Each node has four neighbors— nearest orthogonal, with inter-node distance between the neighbors being set to 10 units. Note that with nearest orthogonal neighbors, cliques of order three or more are not present. The scalar measure μ
i
is taken to be the normalized signal intensity detected by the sensor node s
i
. If the analysis based on mere intensity cannot be used for event detection, more advanced methods such as frequency domain, wavelet domain, or pattern recognition analysis would be required to compute the measure μ
i
[32]. In the current simulation tests,
Unlike a true spin system (e.g., a ferromagnet), information exchange between a pair of sensor nodes is possible only when both nodes in active state and communicating. A true spin system would correspond to a sensor network where nodes are always listening, so that any changes in the expected behavior of neighbors are promptly known. To this effect, algorithms (e.g., Low Power Listening (LPL) [35]) that offsets the load of communication to the transmitting node, can be utilized but they could be expensive. When not opting for such a communication scheme, a sensor node can only have a passive influence on its neighbors and therefore may not be able to actively update or wake-up a sleeping node. Using the last reported neighbor probabilities, a node handles the task of communicating to its neighbors as follows.
For a node s
i
, let
Expiry time Texp for broadcast is calculated so that Pcomm = 1 − (1 − p
m
)Texp and thus

where Pcomm is a design parameter that determines the likelihood of updating one's neighbors and thus Texp, as seen in Fig. 2. Thus, a sensor node broadcast new

Trend of the design parameter Pcomm versus time steps k.
Sensor network activity is scheduled via a stochastic update of node states, as given in Algorithm 1. In a discrete time setting, a node s
i
computes The effects of neighborhood interactions on sensor network performance (see Subsection 5.1), and A target tracking application (see Subsection 5.2).
Neighborhood interactions in the proposed methodology enable a sensor node to adapt its activity schedule to an event in its vicinity. This event may not be directly visible to the sensor node. To demonstrate the effects of neighborhood interaction, an event is simulated to be detected by only one sensor node (i.e., s0 at grid point (15,10) in Fig. 3). This is done by setting μ0 = 1 for node s0 and μ i = 0 for all nodes s i , i ≠ 0. Figure 3 shows six contour plots, (a) to (f), of activity probability p a of sensor nodes for w = 0, 0.8, 1.2, 1.35, 1.8, and 2.0 respectively. For all six cases (a) to (f), fixed point p∗ = 0.3, β = 0.2 and parameter B1 = 50.
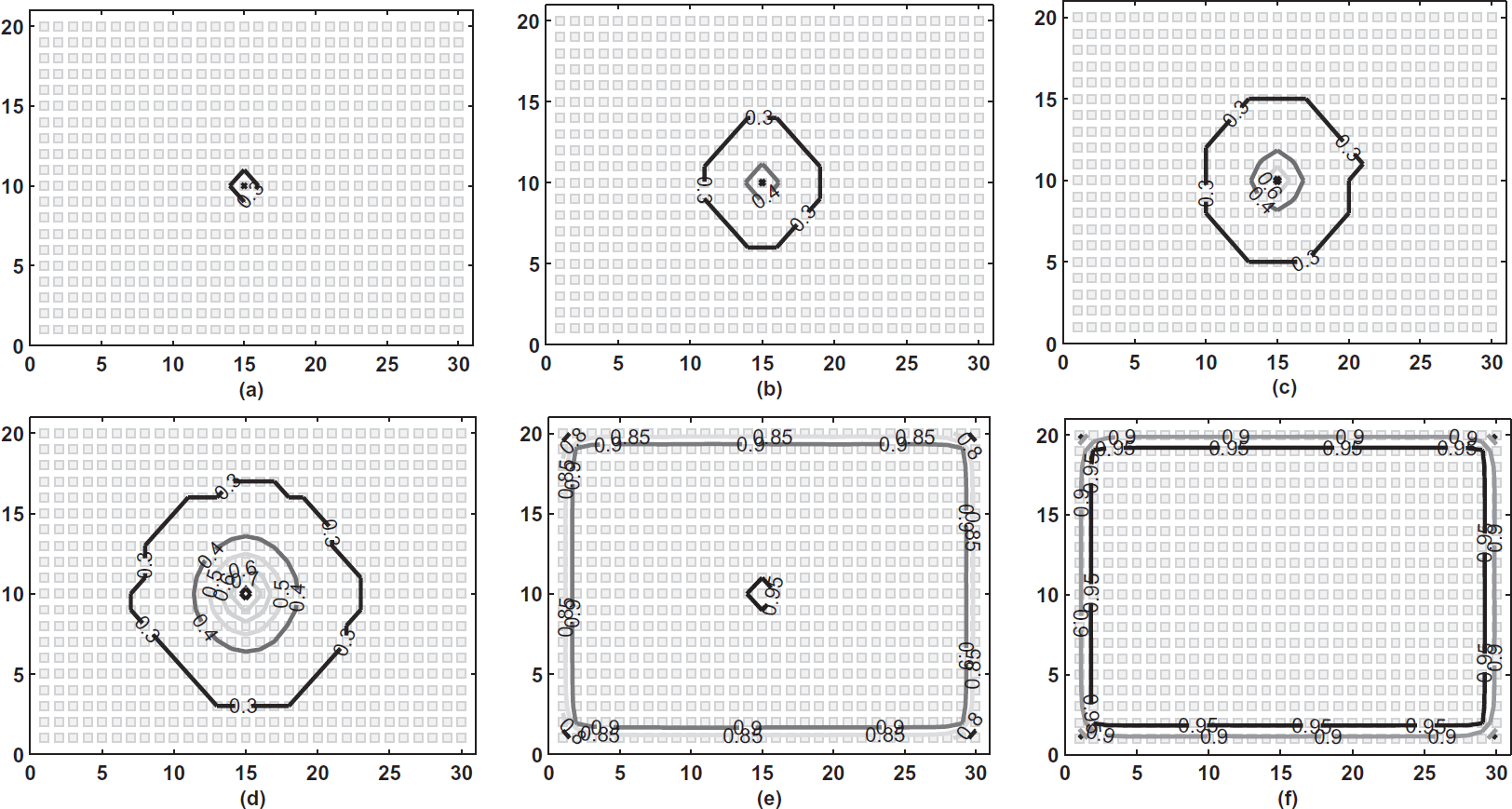
Contour plots of activity probability p a of sensor nodes when for different values of w: (a) w = 0, (b) w = 0.80, (c) w = 1.20 (d) w = 1.36, (e) w = 1.80 and (f) w = 2.0. Only one sensor at grid point (15,10) is detecting the event. (p∗ = 0.3).
As explained in Section 4.3, in the absence of an event each sensor node operates at the fixed point with p a = p∗. But when an event gets detected by a sensor node, each node adjusts its activity probability p a thorough local decisions to adapt to the changes in the environment. This can be seen in the contour plots in Fig. 3. For w > 0 sensor nodes in the immediate neighborhood of grid point (15,10) achieve higher probability of activity through local interactions although they are unable to detect the event directly. This influence gradually decreases further away from the node s0, which is detecting the event.
In Fig. 3 the contour line for p
a
= 0.3 = p∗ can be considered as the boundary of the influence patch due the event at s0. Cases (b), (c), and (d) for w
Figure 4 shows a plot of expected number of active nodes

Expected number of active nodes
Results show that neighborhood interaction allows sensor nodes to gradually adapt to an event even before it gets directly detected by them. These interactions lead to the formation of an influence patch whose size can be controlled using an appropriate choice of w. Above the critical point, a localized event detected by single node can activate a large number of nodes. Thus, to ensure a stable performance of the sensor network operating below the critical point is desirable. It should be noted that the critical point for phase transition is dependent on the inverse temperature β.
This section presents a target tracking application of the proposed methodology. The intensity of the signal, used to detect the target, is simulated to follow inverse-square law. This would be true in many cases such as when the target has an acoustic or a magnetic footprint. In both cases the signal intensity would decay proportional to r−2, where r is the distance form the target. An acoustic response from the target would be obtained when a noisy target moves through the sensor field. While, ferrous targets such as a vehicle would produce a magnetic signature by affecting the nearby Earth's magnetic field.
The task of estimation of target attributes such as position and communication to the data sink is handled by cluster head. Dynamic Space-Time Clustering (DSTC) given in Algorithm 2 [25] is used by the sensor nodes to elect cluster heads. Cluster heads perform local information fusion and transmit assimilated data as short packets to the data sink using single-hop communication. In the current work cluster heads estimate the position of the target using a weighted mean of sensor node positions. The weights used are the corresponding measures μ i from the sensor nodes. The data sink may receive data from one or more cluster heads and use it to get a final estimate of the target position. Cluster head selection, target position estimation, and communication to a data sink are done to demonstrate efficacy of the proposed methodology to enable target tracking. A more sophisticated approach such as multilateration or Kalman filtering for position estimation can be used. Sensor field is the same as used for studying the effect of neighborhood interaction.

Adaptive Sensor Activity Scheduling (A-SAS)

Electing Cluster Head
Figure 5 shows the results for target tracking as snap shots at three instants of time - cases (a), (b), and (c). Each case shows the sensor field and a contour plot. The sensor field shows the sensor nodes in four modes -
active (sensing and sniffing for messages from neighbors - Rx), inactive (neither sensing nor receiving), cluster head (performing information fusion besides sensing and receiving) and (iv) transmitting (sending new p
a
to neighbors - Tx).

Snap shots of the sensor field and activity probability p a contour plots. Subplots (a), (b) and (c) show three positions of the target progressively advanced in time. (p∗ = 0.3).
The corresponding contour plots show the distribution of activity probability p a of sensor nodes. It can be seen that as the target moves through the sensor field, sensor nodes adapt their p a to suit the current scenario. The contour plots show that the target (black dot) is always in an area of high probability of activity. While sensor nodes far away are unaffected by the presence of the target. This is confirmed by the snap shot of the sensor field, which shows nodes in the immediate neighborhood of the target in active mode and elected as cluster heads for information fusion. Nodes ahead of the target are transmitting to inform neighbors of their current (increase in) probability. While nodes behind the target are informing their neighbors of new p a (decreased as target moved away).
As for previous application, measure μ
i
is taken as the normalized signal intensity. Parameters p∗, β, w and B1 are chosen as 0.3, 0.2, 0.8, and 10. In Algorithm 2 p
c
= 0.9 for cluster head election and change in activity probability δp
a
= 0.02 in Algorithm 1 to broadcast p
a
to neighbors. Nodes transmit for a period Texp (Equation (17)) to ensure with Pcomm
Figure 6 show the true track of the target (solid line) and the estimate of its position obtained using the weighted mean approach. Estimated target positions are appreciably close to the true target track for a simple weighted mean approach. It can be seen that the sensor network is able to adaptively activate node so as to enable target tracking.
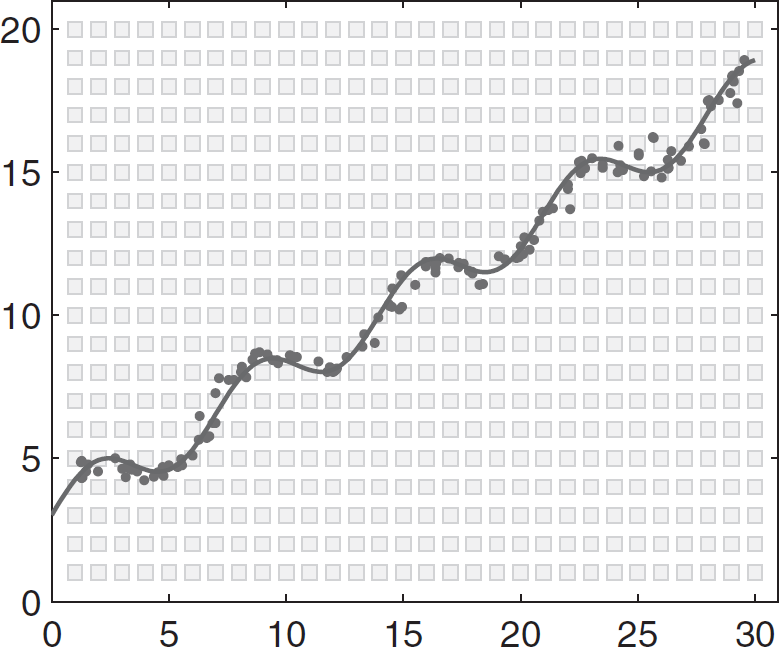
True target track (solid line) and estimated positions (dots) of the target obtained using weighted mean approach.
This paper presents an adaptive methodology for sensor node activity scheduling in sensor networks based on the fundamental concepts of random fields on graphs and Statistical Mechanics. Clique potentials have been defined in this context and a hybrid Ising-like model is constructed to suit a sensor network application. This procedure allows the sensor nodes to make simultaneous local decisions by relying on their sensed parameters and changes in expected behavior of their neighbors. These local decisions, in turn, evolve to a meaningful global behavior of the sensor network. Tests have been conducted on a simulated sensor field of 600 nodes to
observe the effects of neighborhood interactions and for a target tracking application.
The framework presented in this paper provides a method for collaboration in a sensor network for a resource aware operation. The following are a few directions for further investigation.
Extension to address situations where sensor node states are not binary;
Inclusion of factors such as communication link or sensor node reliability and inter-node distance in the interaction coefficient w ij ;
Use of methods such as statistical pattern recognition for the scalar measure μ [32], [33]; and
Stability control
Footnotes
1
2
3
For w = 0,
Appendix
This appendix presents a more detailed and rigorous background on the theory of random fields used for methodology formulated in the main text.