
Abstract
This paper presents a coordination model that contains three active entities: actors, roles, and coordinators. Actors abstract the system's functionalities while roles and coordinators statically encapsulate coordination constraints and dynamically propagate these constraints among themselves and onto the actors. A software system's attack-tolerance and survivability in open hostile environments are enhanced through appropriate constraint propagations and constraint enforcements.
The role represents a group of actors that share the same set of behaviors declared by the role. Coordination and coordination constraints in the model are categorized into two classes: inter-role coordination and intra-role coordination. The coordinators are responsible for inter-role coordination; while the roles are not only abstractions for a set of behaviors they also coordinate the actors which share the same role. This setting implies that both the coordination constraints and coordination activities are decentralized and distributed among the coordinators and the roles. The decentralization not only shields the system from single point of failures, but also provides a foundation that survivable feedback loops can be built upon. The survivable feedback loops presented in the model resist the contamination of the system by faulty elements and thereby protect the whole system from being broken down by single failures.
Introduction
Fault tolerance creates a stringent boundary within the information system beyond which the effects of faults shall not propagate; yet cyber defenses are layered. Cyber defenders realize that some defenses will be penetrated due to (then unknown) vulnerabilities; however, other defensive layers should not have the same vulnerability and thus will withstand the attack and remain intact. Once a defensive layer is breached, the attacker-induced faults can then propagate but the other layers of defense are intended to insulate the user from the effects of the attack. “Defense in depth” is a mainstay of protecting networked information systems from attack and fault tolerance techniques are applied to a defensive layer for the containment of faults.
According to Degani's book on computer interfaces [4, 25], we all have an internal model of how things ought to work and a fixed and conventional
set of expectations telling us what our interaction with a machine “should” result in.
The results are usually beneficial; yet, while anticipating the benefits of computers we
simultaneously cope with the anxiety of the inevitable computer glitches: personal computers hang,
on-line transaction systems become inexplicably non-responsive, and frequently visited web pages are
suddenly unavailable. Our notion of how computers work for us is therefore tainted by the opposing
notion of how frequently they fail. In the context of ubiquitous computing, the sheer number of
computers involved can only mean that likelihood of failure cannot be remote. Blending conflicting
notions of positive and negative computer performance is also pointed out by Degani when he says: These machines fascinate us because they are powerful, dutiful, precise, unemotional, and
extend our abilities beyond our human reach. Yet at the same time, we have a deep fear of being
betrayed and hunted by the very machines that we create and nurture.
Of course, in critical computer applications, such as command and control, the fear of machine betrayal is drastically reduced because they are built according to principles for achieving high system dependability. Dependability is that property of a computing system that allows reliance to be justifiably placed on the service it delivers [14], and the following equation captures dependability's quantification:
Dependabilitysystem = Pr{NoFault} + Pr{CorrectOperation | Fault} × Pr{Fault}
where Pr{X} denotes the probability of event X occurrence.
The above equation indicates that increasing the dependability of a system means increasing the terms on the right hand side. Attempting to make Pr{NoFault} = 1 is possible when the system is composed of the best, most reliable, and therefore expensive components and that the system undergo extensive design reviews and testing to remove any faults prior to fielding the system. Achieving Pr{NoFault} = 1 is unrealistic; no one can reasonably expect a component of even moderate complexity to not have some potential to fail. This is where the second term compensates for the first: maintaining correct operation given the condition that a fault has occurred defines fault tolerance.
It is important to note that the above discussion is for faults that we can predict. Faults induced by attackers [10], however, cannot be treated in this way because time is on the side of the attackers: they probe a system for weaknesses and decide when to create a fault that will lead to failure(s). Nomenclature from fault-tolerant computing says that a fault leads to failure(s), and the effects of a failure are exhibited as an error. In cyber defense, attackers probe the system for vulnerabilities. Once such vulnerability is exposed to the attacker and we say that the attacker has induced a fault. Therefore, our approach to faults is not to predict them but to prevail over them. By distributing the security and fault-tolerance policies among mutually checking components, we create survivable feedback loops to support a form of self-adaptivity that transforms fault tolerance to attack tolerance.
The remainder of the paper is organized as follows: Section 2 presents the ARC (Actor, Role, and Coordinator) model in which the security and fault-tolerance policies are distributed among mutually checking components (i.e., roles and coordinators). The roles and coordinators, on one hand, are separated from the components (i.e., actors) that perform the system's regular functionalities. On the other hand, they enforce and monitor the specified policies on the actors. Section 3 presents multiple survivable feedback loops built in the ARC model and discusses how the ARC model may self-heal from attacks on individual actors, roles, and coordinators. Section 4 presents an application of the ARC model in multi-dimensional sensing where coordination between data availability and consistency constraints is needed. The related work is presented in Section 5. At the end, we conclude our work and point out future research directions in Section 6.
The ARC Model
Networked computers form the information systems on which people now rely, both in critical national infrastructures and in private enterprises. Today, many of these systems are far too vulnerable to cyber attacks that can inhibit their functioning, corrupt important data, or expose private information. “Attack tolerance” strives to maintain system liveliness and safety and has become a key research issue in the cyber defense research community.
According to Laprie's dependability definition [12], a system failure occurs when the delivered service deviates from fulfilling the system function; while an error is that part of the system state which is liable to lead to subsequent failure. The fault is the cause of an error.
If a system is attacked successfully, then the system will eventually be in a faulty state. The faulty behavior (i.e., a failure) may not manifest immediately. However, for an attack to be successful, we say that such an attack was preceded by a fault. This indicates that each successful attack (A) implies one or multiple fault(s) (F) i.e., A → F. Logically, if we can prevent all the faults, we can survive all the attacks, i.e., the contra-positive of the implication, ¬F → ¬A, should hold. Unfortunately, real computer systems in general are too complex to undergo enough scrutiny and testing to assure that all faults can be prevented. Therefore, we assume instead that some faults will be created from a successful attack. However, with the proper use of fault tolerance, the effects of the faults (i.e., errors) will be absorbed, not propagate beyond a known boundary, and the system will react accordingly (i.e., ¬F). It, hence, follows that ¬F → ¬A and the system we designed is self-adaptable and survivable to attacks.
Unlike traditional security measures with which the central control and administration are sufficient, survivability in open hostile environments must address highly distributed, dynamic, and unbounded environments that lack central control and unified policies [22, 19, 21]. To overcome this challenge and ensure software system dependability in open hostile environments, a good model that captures the characteristics of the system and the environment becomes an essential factor.
As pointed out in Dr. Randell's “Facing up to Faults” Turing Memorial Lecture [17], “… multiple activities in a decentralized system will often not simply be competing against each other for access to some shared internal resource, but rather will on occasion at least be attempting to cooperate with each other, in small or large groups, in pursuit of some common goal.” As critical information systems emerge from a “closed castle” into distributed paradigms, the cooperation among distributed elements (which compose the larger cyber systems) inevitably become the focus of such systems. The ARC (Actor, Role, Coordinator) coordination model was developed to model an open distributed system's non-functional requirements (or QoS requirements in general), such as its survivability and attack-tolerance requirements [18].
More specifically, the ARC model has the following characteristics: The Actor model is used to abstract the concurrent computational part of a distributed cyber
information system, while an independent coordination model is developed to address the individual
composing entities' cooperation or coordination. Further, the general QoS requirements and
particular, survivability, and attack-tolerance requirements are realized through specific
coordination among the asynchronous entities. The concept of role is introduced into the coordination model. The role provides
an abstraction for coordinating behaviors that may be shared by multiple actors and also provides
for localized coordination among its players. Coordination in our model is divided into inter-role and intra-role coordination to ensure
clearer separation of responsibilities and reduce the complexity of individual coordination
entities. This division further ensures that both the coordination constraints and coordination
activities are decentralized and distributed among the coordinators and the roles. The survivability and attack-tolerance requirements are mapped to coordination constraints that
are transparently imposed on actors through message manipulations carried out by the roles and
coordinators.
Conceptually, the ARC model is composed of three layers as illustrated in Fig. 1 . The separation of concerns is made apparent through the relationships between the layers. The actor layer is dedicated to functional behavior and is oblivious to the coordination enacted in the role and coordinator layers. The roles and coordinators occupy similarly-named layers, but together these two layers are responsible for imposing the coordination and QoS constraints among the actors. This dual-layer is oblivious to the actor layer. The coordinator layer is dedicated to inter-role coordination. The role layer serves as the bridges between the actor layer and the coordinator layer. The role layer may therefore be viewed from two perspectives: from the perspective of a coordinator, a role enables the coordination of a set of actors that share the static description of abstract behavior associated with the role without requiring the coordinator to have fine-grained knowledge of the individual actors that play the role; from the perspective of an actor, a role is an active coordinator that transparently manipulates the messages sent and received by the actor. The roles in the role layer and the coordinators in the coordinator layer are active state-based objects that enable the coordination policies within an application to adapt over time. While actors communicate via messages that are subject to delay, the information required by roles and coordinators is communicated via atomic events that are processed atomically by all interested roles and coordinators.

The ARC model.
Actors in our ARC model are based on the actor model in [1]. More specifically, actors are active objects: they have states and behaviors. The states and the current behavior of the actors decide how they process messages (operations). Actors communicate with each other through asynchronous message transfer. Unprocessed messages are buffered at the receiving actors' mailboxes. An actor's state can only be changed by the actor itself, and state changes only occur during the processing of messages. The active thread within the actors will continuously process messages whenever their mailboxes are not empty (Fig. 2). Such an actor abstraction provides a unified representation of system resources because all functional processes, such as networks, network protocols, memories, services, and application processes (in-house-developed, or off-the-shelf products), are treated as actors. Furthermore, each actor can perform three different types of primitive operations: send messages, create (new actors), and become (to change its behavior). Corresponding to these operations are events that are observable by other entities in the systems.

An actor.
Roles serve two purposes. First, roles provide static abstractions (declarative properties) for functional behaviors that must be realized by actors. Coordination based on roles is therefore relatively stable, even though the underlying actors may be numerous and dynamic. In addition, roles actively coordinate actors who play roles towards satisfying fault-tolerance requirements. The intra-role coordination (that is played out by the actors) that is coerced by roles complements the inter-role coordination enacted by coordinators.
Every role must have a distinct purpose. This assumption disallows overlapping roles thereby
eliminating the possibility that a role may be replaced by a set of other roles that might possibly
create conflicting constraints upon an actor. These conflict-free constraints are based on the
underlying actor model: each actor has only a single thread of control and hence at any given time,
it can play only one role. More precisely, let B(γ) denote the
actor's functional behaviors declared by role γ, B(α) denote
the functional behaviors provided by actor α, Γ and A denote the set
of roles and actors in the system, respectively, and F is the actor to role
assignment function. At any given time, well-defined roles and actors in a system must satisfy the
following requirements: Roles are exclusive: the role declared behaviors do not overlap, i.e., Roles are exhaustive: all actors belong to one of the roles, i.e., Roles are repetitive: repeated actor behaviors replicate the assignment of the actor to the same
role, i.e., Each actor only plays one role at any given time, i.e.,




As active objects, roles have states, and based on its state coupled with a set of intra-role constraint policies, a role actively coordinates the actors sharing that role and maintains the integrity of itself. In addition, the roles are responsible for propagating constraints to actors and events to coordinators (the discussion of coordinator is in section 2.3). The intra-role constraint policies are role-state dependent. Hence, by changing role-states, we can have different and adaptive policies applied on actors. The role-state changes are triggered by observed events. Furthermore, the constraint policies are applied to actors through manipulating messages. Hence, the actions the roles may take can be: reroute a message to different actors within the role, broadcast a message to all group members with the role, or block a message temporarily from dispatching to the receiving actor. A template of role specification is given in Fig. 3.

A role template.
The declarative criteria in the roles not only abstract the behaviors of actors, but also present a static interface to coordinators. Coordinators, therefore, do not have to directly coordinate actors, but implicit groups of actors, i.e., through roles. Although in an open environment actors are very dynamic, they join or leave the system frequently. With the abstraction created by roles, coordinators are refrained from such dynamics. The roles also contain a set of policies that govern over all the actors that play the role. For instance, if we use a replication mechanism to protect a data buffer against possible faults, we create multiple actors performing as data-buffers. In order for all these actors to be consistent, we have to meet synchronization constraints for any data written to or data read from the buffers. Therefore, we can define a SyncBuffer role which has a policy that all messages sent to any buffer actor that are of the SyncBuffer role must be broadcast to other SyncBuffer actors, and all messages within the SyncBuffer group, must be processed “atomically.” Such constraints are transparent to actors. Figure 4 illustrates the SyncBuffer Role, where a message sent to a SyncBuffer actor is broadcast to all the role members. Figure 5 is the SyncBuffer Role specification.

SyncBuffer.
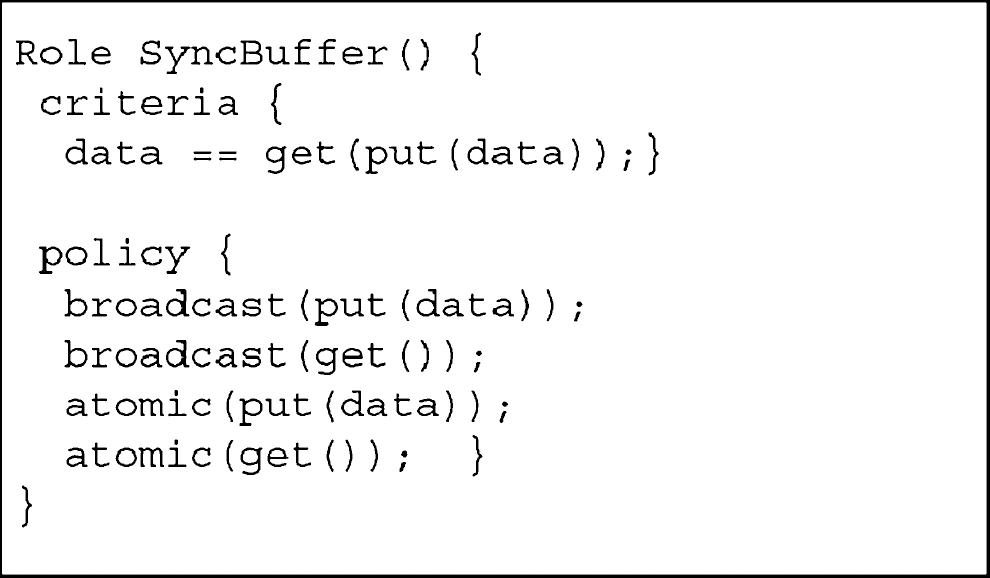
SyncBuffer role specification.
For example, to eliminate a bad actor that tries to overflow the buffer by sending it highly frequent messages, a new policy that limits the put frequency can be added into the SyncBuffer role.
In the ARC model, coordination and constraint policies are distributed among coordinators and roles. One of the obvious advantages of such a distribution, other than avoiding the single point of failure and to control scalability, is localization of a fault's impact—if the role becomes faulty, then its only effect is upon those actors that play the role.
Another aspect of the roles is that the roles in the ARC model are active and have a set of supporting operations that not only maintain the role's integrity, membership integrity, and policy integrity, but also propagate constraints to actors, and events to coordinators.
As roles have their own policies, the supporting operations can check for compatibility between their own policies and with those the policies propagated from coordinators. This gives another level of protection against faulty coordinators.
Similar to the roles and actors, coordinators also have states and are active. They are able to observe events and make corresponding state adaptations. The declarative constraint policies are state-based and apply to roles only. The actors and coordinators are mutually transparent: though changes on actors or coordinators may impact each other, such impacts are only passed through roles.
Generally, in an open environment, the number of functional entities (i.e., actors), can be very large and quite dynamic. However, the functional categories of the actors in a system (i.e., the roles that actors play), are relatively small in number and tend to be stable. Hence, from a coordination perspective, role-based coordination is lightweight and more scalable compared with individual functional entity-based coordination especially in open systems. Furthermore, as the roles shield the dynamics of the actors, the logic of role-based coordination becomes simpler and more reusable.
It is worth pointing out that coordination in the ARC model is mostly concerned with synchronization among distributed entities and this echoes the main focus of most existing coordination models [7, 26]. For instance, in a battlefield, there are three roles, AirForce, GroundForce, and BackupForce. One scenario of coordination of these three roles is: AirForce must reach the destination at least one hour before the GroundForce or the BackupForce must be deployed as AirForce. The active, stateful coordinators provide the expressiveness to handle such complex coordination requirements.
A template of a coordinator specification is given in Fig. 6 .

A coordinator template.
Informally, the constraint section defines a set of constraints. Each constraint can involve several roles. A constraint can be instantiated (i.e., “told”) upon the role(s) when a coordinator handles an event in its policy section. Policies are guarded by a specification of the event and may be accompanied by a supporting boolean condition involving states and parameters. The guard for a policy is evaluated each time an event occurs, and although all applicable policies are processed in an arbitrary order, they maintain atomicity to the outside world. A policy may involve constraint updates and/or state updates. A major difference between the role and coordinator language definitions is that the roles have declarative criteria for their member actors and the policies within roles are enacted upon actors, while the coordinators have declarative constraints for their underlying roles and the constraint policies in the coordinators are imposed on the related roles.
There are two types of communication media: messages and events. Messages are communications among actors and are processed by operations that the actors provide. Computations are carried out by processing messages. Events, on the other hand, are “happenings.” Events can happen at actors, roles, or coordinators. However, as roles are transparent to actors and coordinators are transparent to roles, events at a higher level should not be of interest to the lower-level entities. The root cause of events can be traced to actors processing messages. As discussed in Section 2.1, the actors only have three primitive operations, i.e., send, create, and become, and these operations are the root causes of events.
In contrast to messages in the system, which are point-to-point in the actor model, events are broadcast. The roles and coordinators can filter out those events that are not of interest to them. By processing messages, actors may change their states and behaviors; similarly, by observing events, roles and coordinators may change their states, which in turn may cause their state-dependent policies to change accordingly. A policy change will then be propagated down to further influence other entities' behaviors.
Built-in Survivable Feedback Loops
From the discussions in previous sections, it is not difficult to see that the ARC model is a layered model—from coordination abstraction (coordinators), to functional abstraction and location coordination abstraction (roles), and to functional implementation (actors), with each layer having different responsibilities and communication schemes. The communication between layers is through events and propagation of constraints. Specifically, events are propagated up from actors to roles, and then further on to coordinators. Constraints, on the other hand, are propagated from coordinators to roles and further down to actors. Figure 7 illustrates the dynamic propagation among the three types of entities in the ARC model.

Survivable feedback loops.
As the figure depicts, there are two closed feedback loops. Loop 1 is between actors and roles. While processing messages, the actors may generate events; by observing events, roles may change their constraints and exclude “bad” (i.e., failed) actors from the group by re-routing messages out from the bad actors. In the ARC model, actors are functional units that implement the functionalities of the system. They are reactive such that only messages can trigger their activities. Hence, starving actors from messages effectively eliminates the bad actors from further impact to the system.
A similar loop exists between the roles and coordinators (Loop 2) in which the coordinators may exclude bad roles. In addition, because the roles also have their own policies they can, through compatibility checking, reject constraints from bad coordinators, and confine bad policies from propagating from to the actors beneath these coordinators. In particular, consider a scenario in which a local coordination policy within role R states, for instance, that each actor playing the role must finish processing a message of type M within t time units. Assume that actor A playing the role was attacked and eventually behaves differently from what the role R expects by taking longer than t time units when processing the message of type M (which could indicate the actor is exhibiting faulty behavior).
From R's perspective, all the member actors have the same behaviors and are able to perform the same operations. By observing actor A's faulty behavior, the role re-routes the messages targeted to A to other group members. By eliminating messages delivery to the infected actor A, actor A is starved and effectively excluded from the system. Other than from role R's perspective, such an elimination is transparent from the system.
The above scenario assumes that the role is not faulty and is able to observe unexpected behaviors. However, the role might itself become faulty. In this case, the role behaviors will deviate from what the coordinators expect and cause the coordinators to reenact a role that satisfies the coordinators expectations. The semantics of the ARC model assures that each actor can play only one role at any given time, so the creation of a new role automatically removes the faulty role's control over the underlying member actors. However, as the intra-role policies are encapsulated and role-state-dependent, the newly-created role may not be implanted by the coordinator with those policies that were contained in the faulty role. Nevertheless, the new role can at least propagate the coordinator's constraints down to the actors. In other words, some local policies are removed from the system that may have effects on the system. These effects are localized and can only affect the member actors.
When a coordinator becomes faulty, one scenario is that the faulty coordinator issues different or contradictory constraint policies. If all or majority of the coordinated roles (distributed voting scheme [11] is applied to find the majority) find the policies are incompatible with their local policies, it is highly likely that the coordinator is faulty. The roles can refuse further propagation of the faulty coordinator's rules and hence prevent the fault from spreading into other areas of the systems.
Background and Problem Description
To tolerate faults that might happen on individual sensors, such as radar devices, a widely used approach is to replicate the sensors. In certain situations, we may even deploy different types of sensors to ensure data integrity. For instance, to detect a foreign object, an infrared sensor and a wave sensor may be deployed in a protected region. Data sensed from different sensors must be correlated in time to make coherent identifications of the foreign object. In time critical systems, such as in a battlefield, data sensed from an environment has timeliness attributes associated with it, meaning that there is a time after which the data is of no use.
However, as argued by Dr. Lee in his invited talk [13], precise timing estimation of software execution time in an embedded networked system is impossible. However, what we may know are the statistics of time within a range. For instance, the moment an enemy plane emerges into a region, it usually takes a non-faulty radar within t1 to t2 seconds to detect it and transmit the information to a control center. In other words, normally, the command and control (C2) center should receive the plane information within the [t1, t2] time interval; however, exactly when may only be known statistically.
Consider a military setting in which two types of sensors are deployed in a region to monitor potential enemy aircrafts. One type is an infrared (IR) sensor used for producing thermo graphic images. Another type is a radio wave (RW) sensor used for measuring speed of unidentified flying objects. The IR sensors produce clear and reliable data. However, due to electromagnetic interferences and territorial circumstances, RW sensors produce less reliable data and hence it becomes necessary to get a consensus from other RW sensors deployed in the region. Furthermore, in order for a soldier or command and control (C2) center to take critical actions, the data from two different sources (IR and RW) must be coherent—not only they provide the correlated information (if IR gives an image of an airplane, the speed detected by RW must be within the jet flying speed limit), but also such information arrives at the requester within a limited time frame Δ. The scenario is depicted in Fig. 8 .
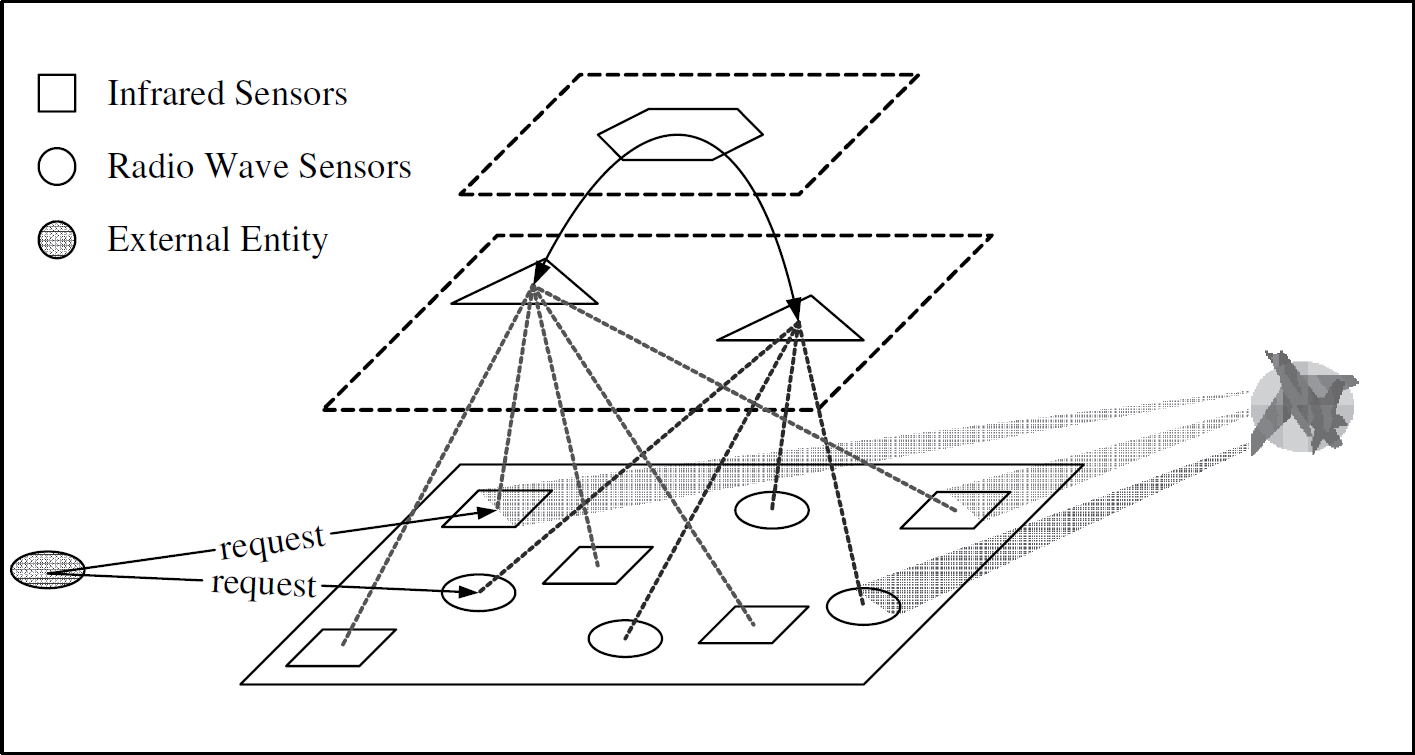
An entity is sending messages to two types of sensors requesting thermo graphic image and speed of an unidentified flying object.
Given the problem description, it is easy to see that the sensors could be organized into two
disjointed roles, namely IR and RW. The constraints to ensure the semantic coherence and timing
relation between the two different types of data obtained from IR and RW are part of the
coordination among roles. The pseudo codes for the two roles are given in Fig. 9 and Fig. 10, respectively. In the following, we assume that a message between a sensor and the
data requester — msg — is a tuple (tag, cv, aid), where the tag gives the timestamp
for the message, cv is the communicative value of the message, and aid uniquely identify the
receiver actor.

IR role.

RW role.
A coordinator is needed to monitor and constrain message deliveries between the two roles in order to guarantee that the reply messages satisfy the timing constraint. Since the roles abstract the behaviors of actors and present a static interface to coordinators, the coordinators should see the behaviors of a group of actors instead of individual actor behaviors. Although different sensors differ in their accuracy and transmission time of data, the roles shield the sensor information from the coordinators and present to them only in group properties such as: once a request is sent to an actor below role IR, how long does it take for any actor below role IR to reply a valid message to the requesting actor.
To study the timing constraints between the two roles, we have to first study their individual timing behaviors. In the next subsection, we study the expected time for obtaining a valid vote using different voting protocols in open hostile environments. Curious readers of the ARC model could just take equation (13) and (22), leave the rest of the details and directly jump to Section 4.4 which describe the coordinator and coordination constraints. However, Section 4.3 offers a more in-depth explanation for the whole case study including the distributed voting problem.
The above design is concerned with hardware sensors. It should be noted that the general problem of surveillance and detection could be cast with software sensors. Take, for example, the problem of detecting an intruder in a network. This problem calls for distributing software components that act as sensors where each sensor may be different—designed to detect different forms of network attack—but their detection capabilities overlap. To reduce the problem of false alarms, the outputs of these sensors would be voted on to give assurance that an attack detection is valid.
In this subsection, our discussion is based on the assumption that all the n sensor units provide datum Di to the decision unit(s) and the inherently correct data value is D. The information credibility may not be at the fixed 100% level, that is, Di may not always be the same as D. Instead, it may be time dependent. We use a credibility function Ci(t) to describe the probability that Di is the same as D at time t.
The following voting schemes are discussed here:
We further assume that the probability distribution function for the time a sensor i takes to obtain and transmit data is given as Vi(t). In other words, the probability that the decision unit get a datum from a sensor i by time t is given by Vi(t).
To formulate the problem, let Xi be the random variable representing
if the decision unit get a vote from the ith sensor

Thus,
P{Xi=1}=Vi(t),
P{Xi=0}=1—Vi(t).
Moreover, we interpret data credibility as the probability that a given data
Di agrees with the inherent correct data D. Let
Yi be the random variable representing whether the data
Di agrees with D, that is

Thus,
P{Yi=1|Xi
=1}=Ci(t),
P{Yi=0|Xi
= 1}=1–Ci(t). Therefore, the
probability that the decision unit get a correct vote from the ith sensor is

and the probability that the decision unit cannot get a correct vote (either the vote is not
given, or the given vote is incorrect) from the ith voter is

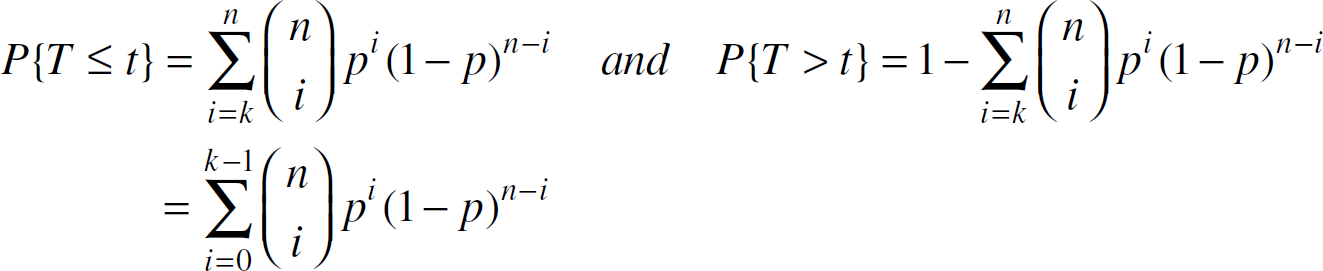
When all sensors are homogeneous, i.e., their Ci(t)
and Vi(t) are identical, the probability that at least
k similar (or the same as D) votes are collected is the summation
of binomial distributions:

Note that p is a function of t, it follows that equation (9) is the probability
that at least k similar votes are collected before time t. Let
random variable T represent the time point at which enough similar votes (at least
k) are collected, i.e., the decision time, we have,
Therefore, the expected time that at least k same/similar votes are collected by
the decision unit is

Note that in (11),
different k's are used in distinct voting schemes. In
1-out-of-n scheme where all sensors are truthful, we have that
k=1. Whereas in k-out-of-n scheme, we have
Under this scheme, we have k=1 and
C(t)=1 in (11). We further assume that
V(t) is uniformly distributed over the interval [0,
T1], i.e.,

Substitute k, C(t), and V(t)
in (11), we have

Equation (13)
indicates that as n increases, E[T] decreases. In other words, under truthful
assumption, resource availability positively impact data availability and system dependability. More
careful observation reveals that the voting subsystem under truthful assumption is in fact a
parallel system where the probability that the decision unit get at least one correct data from
n sensors is

in which ∏qi characterizes a parallel system. In such a system, sensor units work in a “co-operative” way. Therefore, adding resources (more homogenous sensor units) to the subsystem improves its performance and thus reduces the expected decision time.
Similarly, consider a situation in which the data coming from the sensors are at constant rate
(δ) for any unit interval, i.e., the number of data within a unit time is constant over time.
Based on the probability theory, we know that such event probability distribution can be modeled as
exponential distribution, with the probability distribution function given below:

Substitute k, C(t), and V(t)
in (11), we have

Therefore, though the probability distribution functions for voting time are different, if all the sensors are truthful, increasing n, i.e., the number of resources, reduces the expected time to obtain assured votes.
Under untruthful voter scenario, we have k determined by the specific majority
voting protocol (where

The following figures show the relationships between P(t) and n under different t:
As can be seen that when t=0.4T2, which means that the probability of getting a valid vote from an individual voter by time t is less than 50%, adding more homogeneously untruthful resources only makes it harder to get a consensus within given time. Intuitively, if over 50% chance a voter is to lie, adding more such voters only reduces the probability of getting valid votes within a given time. However, when t=0.6T2, which means that the probability of getting a valid vote from an individual voter by time t is greater than 50%, adding more homogeneous resources facilitates the decision process, thus resulting in an increasing probability of obtaining a valid vote. The question now is: how does the resource availability influence the average decision time and thus the data availability?
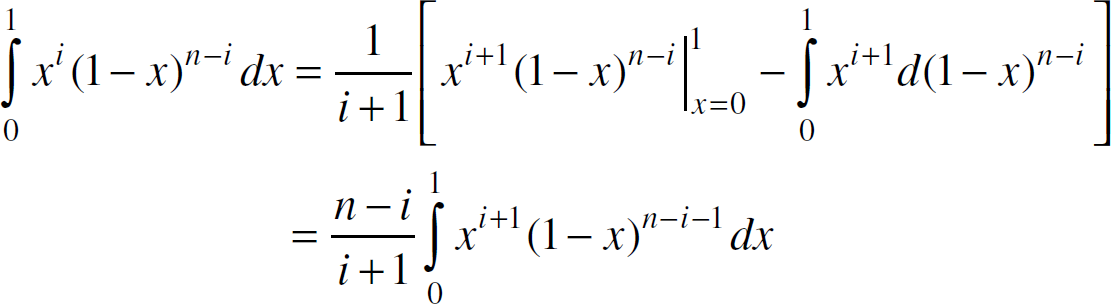
Substitute C(t), and V(t) in
(11), we have

Make the substitution

Integrate by parts, we have,
Use mathematical induction on (20), we can prove that,

Therefore, from (19)
and (21), we have that,

Given that k=⌈(n+1)/2⌉ and
n is large, we have that
E[T]=T2/2

Therefore, in an openly hostile environment where not all voters are truthful, adding a homogeneous resource does not impact the expected time of getting a valid vote. The intuitive explanation for this result is that the integrated effects of (a) and (b) in Fig. 11 are neutralized.

The relationship between P(t) and n.
Similarly, when the credibility function C(t) is exponentially
distributed on the interval (0,∞) with average rate δ, that is,

Using equation (11),
we have:

Make the substitution where

Integrate by parts and use mathematical induction, we can prove that,

Therefore, from (26)
and (27), we have that,

where k=⌈(n+1)/2⌉. The relationship between E[T] and n in case of exponential distribution is illustrated in Fig. 12:

Expected Decision Time with λ=1.
As can be seen, when the number of working sensors are small, increasing the number of sensors
generally decreases the expected decision time. However, since

The expected decision time converges at ln2/λ and no further decrease can be achieved by adding more resources. For example, with 11 sensors, the expected decision time is 0.7365/λ, while with 23 sensors, the expected decision time is 0.7144/λ — a less than 3.0% time gain is at the cost of more than twice the resources.
Given the constraint that the time span between the delivery of the two data cannot be separated by a span larger than Δ, the coordinator could be declared as in Fig. 13.
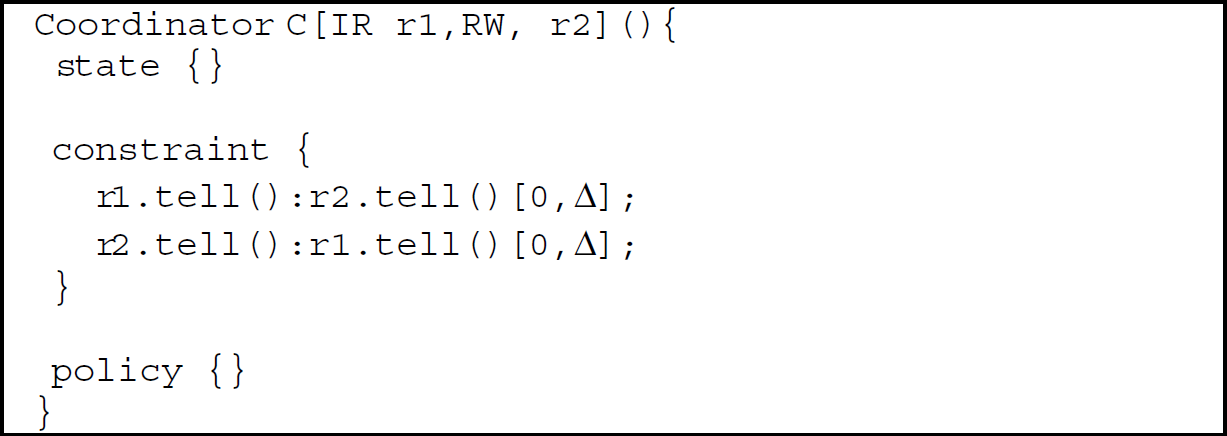
Coordinator.
Note that the timing constraint is expressed in the following format:
event1:event2 timeInterval
Such a constraint asserts that upon the occurrence of event event1, event event2 must happen within the time frame timeInterval. The timeInterval is a relative time duration: the starting point of such interval is relative to the time when event1 occurred. A timeInterval [d1, d2] is valid iff d1, d2 ∊ T, and d1 d2. Where T is a non-negative real number domain excluding spins.
Now, assume that the external actor sends the request at time t0, and
actor α1 who is under role IR replies at t1 and actor
α2 who is under role RW replies (the data is already checked for majority) at
t2. Given the assumptions and results in Section 4.3, together with the relative span requirement,
we have the following timing constraints:

where |A| is the cardinality of the multicast declared in the states of role IR, |R| is the number of actors under role RW, and k is the required majority. T1 and T2 are the corresponding parameters of the uniform distributions. Δ1, Δ2 are the possible deviations (e.g., standard deviations) from the expected decision times and Δ is the maximum time span of the two replies. t1–t0=T1/(|A| + 1) ± Δ1 means t1–t0∊ [T1/(|A| + 1) − Δ1, T1/(|A| + 1)+Δ1].
We further convert the constraints into the form
x1–x2 d:

Given such a set S of constraints of the form
xj–xi
dk, we can construct a corresponding constraint graph
G=(V, E), where

The constraint graph instantiated from (31) is shown in Fig. 14.

Timing constraint graph.
With such a constraint graph, the Bellman-Ford algorithm may be used to detect if the graph has
negative-weight cycles. A negative-weight cycle indicates that the constraints are infeasible. For
example, the cycle will be

This means that role IR is so fast that role RW cannot catch up with it. In case of failure, the
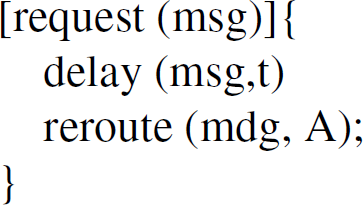
designers must reconsider the specification or declare exception handling codes. For example, when
(33) occurs, the
designer may slow down the reply from actors under role IR by: delaying the delivery of a request to an actor under the role IR by changing the corresponding
policy to or changing the cardinality of multicast by removing some actor from the AidList declared in
state.
As argued by McDermott et al. [15], when considering the survivability of a system, we cannot assume that the system is susceptible to only one type of fault or another during the system's lifetime. Instead, a survivable and dependable system needs to not only correctly and accurately detect the presence of attacks or faults, but also function properly in the face of these faults, especially in mission-critical systems. At the same time, these mission critical systems should also be able to survive faults that are random and unpredictable in nature. Unfortunately, it is still a common practice in security and fault-tolerance community that an ad hoc-chosen, isolated, independent security mechanism, such as firewalls, intrusion detection systems, and software sandboxes is used in building a survivable system.
Recent research has started focusing on integrating different security techniques to block, evade, and react to attacks to improve system survivability. Keromytis's SABER (Survivability Architecture: Block, Evade, React) [9] is an example of the new effort. The SABER architecture uses a coordinated multi-layer approach to defend against attacks targeted at different levels of the network stack. The coordination and correlation of different layers are through a publish-subscribe, event-based infrastructure built into the model. The similarity between SABER and ARC lies in that they both use a multi-layered approach and use light-weighted events as the coordination media. The major difference is that in the SABER model, the coordination and the workflow among different approaches and different layers are built into the framework and it is difficult to customize for different applications—requiring users to understand the framework. In contrast, in the ARC model, both the coordinators and roles are not only proactive entities at runtime, but they also offer high-level user programmable language constructs—allowing a user to easily deploy the ARC into different applications with different attack protection workflows.
Brian Robinson [20] proposed a
three-layered protection model that can be mapped to the ARC model. More specifically, a
well-protected enterprise will require the following elements that are all working in concert with
one another: Data-level protection is handled at the actor level. The semantics of this level security is to
protect its internal data. As actors communicate with the outsiders only through messages, the
actors may decide to encrypt messages they send out; filter out or preprocess messages they decide
to receive and hence protect their data integrity. Application-level protection is handled by roles. The roles not only define the properties and
behaviors that actors (the active processes) by presuming the role they must take, but they also
serve as functionality boundaries. Network-level protection is achieved through the collaboration of actors, roles, and
coordinators. If the actors are well protected, the only breach left for the attackers are messages
on the network. The attackers may remove messages from the network and hence prevent them from being
processed by the receiving actors. (The modification of messages is handled at the actor level.)
However, if an appropriately observing mechanism is built within the roles and the coordinators,
such message loss should be able to be detected by the coordinators.
In our ARC model, we consider coordination as solutions to not only the general dependability problem but to obtaining self-adaptiveness for survivability. In the coordination literature, coordination models and languages can be classified as either data-oriented or control-oriented. For instance, the Tuple Space model and its corresponding language Linda [7] uses a data-oriented coordination model, whereas the IWIM model and corresponding language MANIFOLD [2] is based on a control-oriented coordination. The activity in a data-oriented application tends to center around a substantial body of shared data; the application is essentially concerned with what happens to the data. On the other hand, the activity in a control-oriented application tends to center around the processing or the flow of control; such an application is essentially described as a collection of activities that genuinely consume their input data, and subsequently produce, remember, and transform this data, thus generating “new data” by themselves.
The Linda-like coordination tends to lack flexibility and control both in agent-to-agent
coordination and accesses to local data. For instance, local data are bound by the built-in
data-access primitives, such as write, read, read-with-remove. Any coordination policy not directly
supported by the model typically falls upon the responsibility of functional entities [3]. In open, heterogeneous and unreliable
environments, proposals have been made to enhance the Linda communication kernel either by adding new general purpose primitives or by making it programmable.
The former approach has been adopted by many researchers, such as [24], to add access control primitives for supporting a more secure tuple space, and [8] that creates an ATSpace to support an application-oriented broker service for the tuple space. However, adding new operations to a shared information space tends to limit the uncoupling of the coordination model from the application because the applications must be made aware of what the admissible operations are in order to effectively interact with each other. The latter approach, without adding new admissible operations, makes it possible to program the behavior of the communication abstractions in response to communication events. The tuple center model [16] is one such approach. The tuple center model decouples coordination from computation by separating individual perceptions of coordination and the global coordination issues (such as, constraints, rules). A language called ReSpecT specifies such rules and embeds the control of the rules within the tuple space. The model avoids fixed primitives; instead, it allows a user programmable coordination control and hence is more flexible.
There are a few coordination models that are based specifically on the actor models, such as Frolund's Synchronizers [6, 5] which separates local synchronization constraints from multi-actors, and Varela's directors [23] which uses a hierarchical structure to encapsulate coordination among a cast of actors. However, the directors are not transparent to the actors and before a message is being received, a hierarchical constraint checking must be done requiring each actor and director to know its directors in the hierarchy.
The ARC model integrates the advantages of data -oriented and control-oriented coordination approaches. The coordination data are actor messages; however, the coordination controls are distributed into roles and coordinators. Roles and coordinators can mutually provide some level of security checking and provide the system with increased survivability.
Conclusion
As we have observed over the past decade, critical information systems can no longer be encapsulated inside ivory towers, instead, not only do they reside in an open environment, but also the structure of the system itself becomes distributed and the integrity of the system depends on the coordination of distributed composing elements.
The open environment opens more potential vulnerabilities to attackers and hence calls upon new methodologies and technologies to counter-attack and protect the systems. The ARC coordination model is presented as an attempt to use coordination strategies to improve system survivability. The ARC model distributes coordination constraints, especially fault-tolerance polices, among roles and coordinators. From the design point of view, the model not only avoids a single point of coordination failure in an openly hostile environment, but also provides two survivable feedback loops to detect and contain possible attacks and transform fault-tolerance to attack-tolerance.
Moreover, in an open environment, the number of functional entities (i.e., actors), can be very large and quite dynamic; yet the functional categories of the actors of a system, (i.e., the roles that actors play), are relatively small in number, and stable. Hence, from a coordination perspective, role-based coordination is lightweight and more scalable compared with individual, functional, entity-based coordination, especially in open systems. Furthermore, as the roles shield the dynamics of the actors, the logic of role-based coordination becomes simpler and more reusable.
The notion of defense in-depth motivates us to ask: can the ARC model be applied to cyber defenses themselves? Firewalls, anti-virus software, and intrusion detection systems act as preventive attack measures; yet these very measures are frequently targeted by attackers whose aim is to first disable these defenses so that future attacks go undetected. We seek to find how the ARC model can be applied to attack-detectors. By defining these defenses as actors who carry out defensive roles, the ARC's feedback mechanism could link these defenses together into a self-checking alarm system.
Footnotes
1
Although it is unreasonable to assume V(t)=1, i.e., a sensor is constantly giving out vote to the decision unit, we do this to simplify calculations and because not V(t) alone but C(t) × V(t) characterizes the possibility that the decision unit gets a vote valued D, which is the inherently correct data.
Acknowledgement
This research is supported by NSF under grant CNS 0431832.