
Abstract
Students in the Chemistry and Biochemistry Department at Montclair state University have several opportunities to learn about laboratory robotics. A unit on robotics is included in the senior level instrumental analysis class at the end of the spring semester. Students are also able to receive individual instruction on the robotic systems and high-school students have developed automated procedures during summer enrichment programs.
An important component of the program is the competition setup between the men and women students of the instrumental analysis class. This keeps student attention focused on the exercises without the need to assign homework. This short article describes the equipment used by the department, provides an overview of how it is used, and contains informal observations made by the author about the student experience.
Keywords
Introduction
In 1986, Phillip McKerrow writing in the journal Robotics foresaw that the field would soon become recognized as a formal academic discipline as opposed to the “ad hoc collection of topics spread through a number of disciplines.” 1 A few years earlier the New York Times reported on the founding of a robotics laboratory at Carnegie Mellon University where mechanical engineers and computer scientists would be trained in the discipline. The article reported that Ohio State and Perdue Universities already had programs in this field. 2 The University of New Mexico established a program devoted to research and instruction in robotics and manufacturing. 3
College level robotics programs for engineering students have grown dramatically. Robotics design and construction has even extended to the high-school level and below. The picture changes dramatically when laboratory robotics are considered. Engineering students are trained to design robots. Science students must learn to use what the engineers have already created as an effective tool. The highly respected Journal of Chemical Education has published only one paper about robotics since 1990. 4 A small number of academics in the United States have introduced laboratory robotics into the biology, chemistry, and biochemistry curricula. Most of these efforts depend on used equipment donated by industry and are limited to a few experiments performed over the course of a semester.
There are a number of reasons why robotics should be taught to science students. Even if a student never uses another robot, the discipline has, with some caveats, long been recognized as an effective tool to develop logical thinking. 5,6 Employers expect to hire graduates who know how to apply simple statistics, culture cells, interpret a chromatogram, understand a Material Safety Data Sheet, and use a pipette with reasonable precision. So why shouldn't students know something about one of the most important tools in the modern laboratory?
The Program at Montclair State University
Montclair State University's department of chemistry and biochemistry's robotic systems has been donated by pharmaceutical companies. They include a four-channel Packard Multiprobe (Fig. 1) (Perkin Elmer Inc., Waltham, MA), Caliper (Caliper Life Sciences, Hopkinton, MA) Rapid Plates, and smaller workstations. At that time, when these machines were donated the author was the only person trained in their use, having been a robotics specialist for the Wyeth Pharmaceuticals Pearl River Research Compound Bank and an active member of the Laboratory Robotics Interest Group.
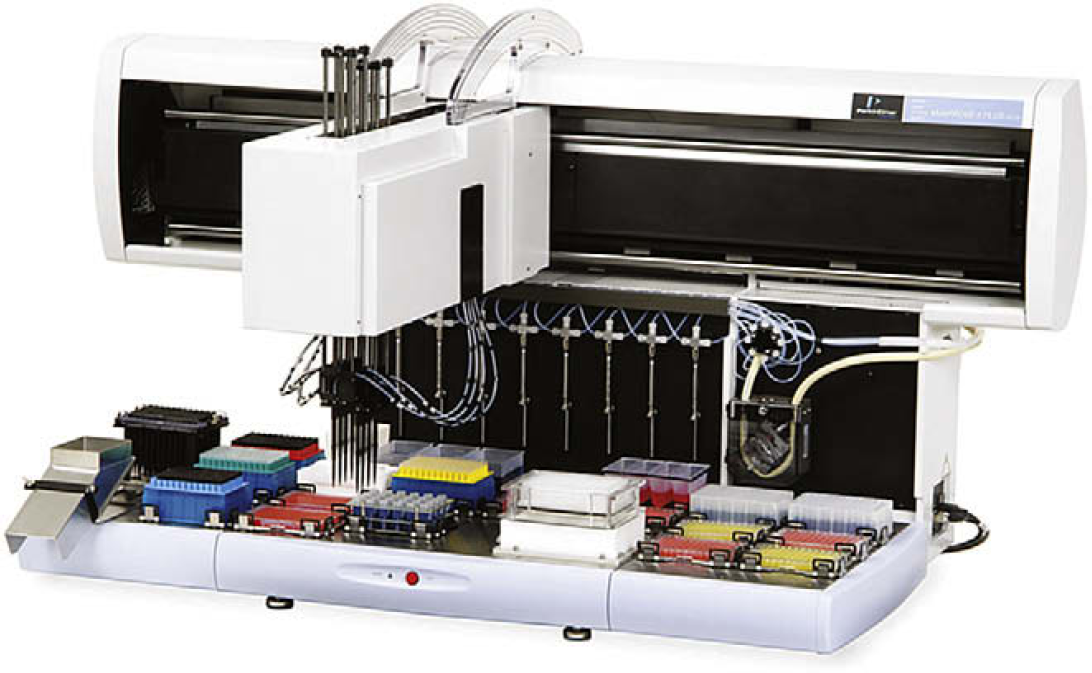
The MultiPROBE II Automated Liquid Handling System from PerkinElmer, Inc., Courtesy PerkinElmer.
Laboratory Robotics is introduced each spring semester during the instrumental analysis class. Because the author is a support staffer in charge of instrumentation and not a faculty member, teaching responsibilities are divided between a professor lecturing on the theory and the author running the laboratory exercises. The class size is limited to 22 students who are juniors and seniors.
The class covers a range of instrumentation typical of the subject; GC, NMR, GC/MS, IR, HPLC, UV/Vis, and Fluorescence spectroscopy. As at most universities, the student receives an unknown organic compound when the class starts and is expected to generate spectra that will enable the structure to be elucidated (and confirmed) by the end of the semester. The large number of detailed laboratory reports and the challenges of interpreting spectra for the first time make instrumental analysis a demanding class.
One week is devoted to robotics in the middle and toward the end of April. By this time, the pedagogical challenge is to keep the students engaged without burdening them with another detailed laboratory exercise and another formal report. Making the robotics into a competition achieves this goal. For the first 2 years of the class, the teams simply consisted of the existing laboratory partners but as time went on the students were divided into men's and women's teams.
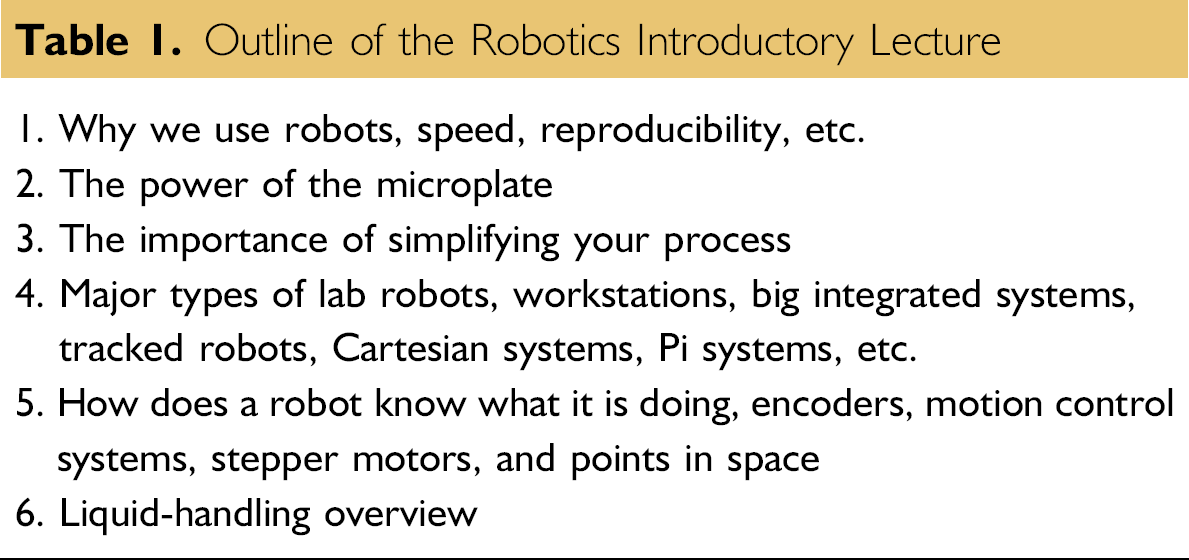
Normally the instrumental analysis class consists of 2-h and three quarter lecture periods on Tuesday and Thursday mornings. These are followed by laboratory sessions in the afternoon. The morning lectures, however, cannot be devoted to robotics as there is a need for review in preparation for the final examination. Before any laboratory work begins, the author gives a single introductory lecture, thus the majority of student time is used for laboratory work. The content of this lecture is shown in Table 1. Because the first exercise consists of teaching points in X—Y—Z space, emphasis is placed on the fact that the robot has no eyes. The only way it can know the location of something is through the operator's control. There are discussions of movement within the work envelope, how the robot keeps track of its position, and how to create a deck layout.
Outline of the Robotics Introductory Lecture
For the purposes of this exercise, any robotic system would be acceptable. The Multiprobe's Cartesian work envelope and gantry design are more intuitively familiar to students than a Pi system or an articulated arm with multiple degrees of freedom.
The students use only one pipette tip out of four on the liquid handler. The Multiprobe's deck is normally fitted with two tip boxes, two reagent reservoirs, and six microplate positions. With the exception of the plates for which X—Y—Z coordinated will be taught, everything is removed from the deck.
At this point, the Multiprobe's X—Y—Z locations are deliberately scrambled. Beyond backing up the original locations no special setup is required. Using the vendor's software to teach the points is explained. Each team then establishes the coordinates of wells within microplates. The goal of this exercise was to reinforce the lecture concepts of motion control with a defined work envelope and how the robot knows where it is and what it is doing. Discussions of pipetting technique and programming routines are not part of this exercise because the goal is learning to work with locations in X—Y—Z space.
Unless the robot is asked to do something that will potentially cause damage, the instructor remains silent and lets students make mistakes. It has been the author's observation that few young people know how to control a real object in three-dimensional space, especially from a remote location. In computer games, no physical object is manipulated, unlike a robot that can crash, spill, drop something, or make some kind of messy error. The author has found that many students will hit the “stop,” “pause,” or “abort” buttons on a piece of equipment without really thinking through the consequences. Some expect instrumentation systems to behave like computers, instantly resetting and being ready for another try. An HPLC or other chromatograph still has mobile phase moving, GCs have ovens to cool, and mass spectrometers may have complex reset procedures. However, once they become comfortable with moving the system using the computer they usually can reteach all of the points without any real difficulties. Six points on the deck is the minimum number for effective teaching.
At the end of the process, the author moves the Multiprobe's tips to the taught points and using a pair of vernier calipers measures how far from the target the point was taught. This can be a difficult step because the author's calipers only go down to a tenth of a millimeter and the students can usually teach the points within a millimeter. The sum of the distances in the X, Y, and Z directions from all of the target points is determined. The team with the smallest sum is declared the winners. In 2007, the men's team achieved a result that was 0.5 mm less than the women's team. In previous years, the winning margin was 1–2 mm. Once the winning team has been established, the exercise concludes with a brief demonstration where 100 μL of distilled water is moved from the deck reservoir to selected wells within the microplate using the same single-channel pipette and fixed tip that was used to teach the points.
The second part of the unit is to use the Rapid Plate to learn the basics of pipetting and simple robotics programming. The Rapid Plate is an excellent tool for this because the basic programming steps can be learned very quickly and there is a large degree of control over the pipetting steps. For students who have used microplates and hand pipetting, the use of the Rapid Plate is also a powerful demonstration of multichannel pipetting's effectiveness. Beyond providing plates, reservoirs, and reagents no special setup is required and the vendor software is used without modification. The Rapid Plate's software library is demonstrated to the students so that they appreciate the need for pipetting height control and the tracking of reagent volumes in both plates and reservoirs.
Each team of students is allowed to create a simple program. It usually consists of taking water from a reservoir, adding it to a plate, and then adding an universal pH indicator. The final step is to add a small amount of acid and change the color of the liquid in the wells. Although the students are free to choose whatever volumes they are comfortable working with and generally stay in the 25–150-μl range.
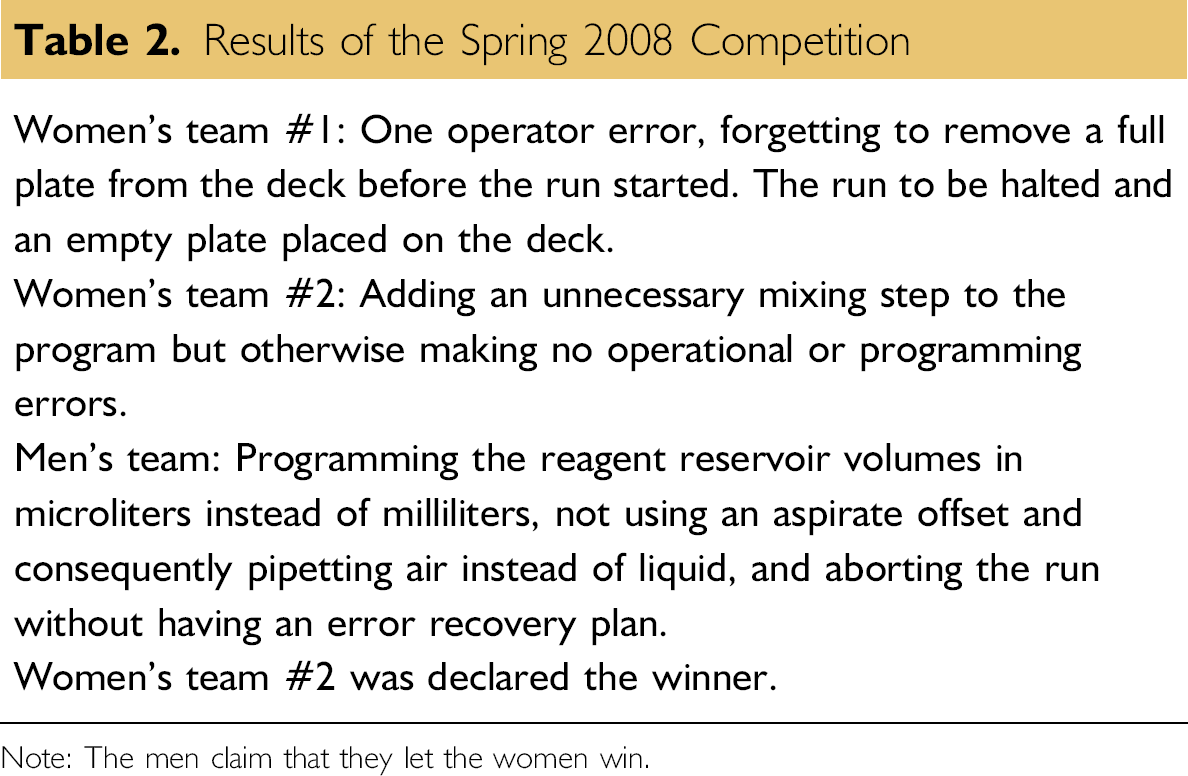
This extremely simple procedure has proven to be a very effective demonstration. Three pipetting steps are also well within the time permitted by the class schedule and well suited for the first programming experience. The results of the 2008 Rapid Plate competition are shown in Table 2. The pipetting program was simple enough, and the students were inexperienced enough that the program's quality could be determined visually. (Although the students used the Multiprobe, teaching points was not part of the 2008 competition.)
Results of the Spring 2008 Competition
The professor gives the winning team a small number of extra points on a quiz or test grade.
In addition to the instrumental analysis class, some students have received individual instruction. Most students took advantage of the opportunity because they felt that this would better equip them for the job market but were pleasantly surprised by the logical thinking and programming skills they acquired.
During the summer months, the department participates in the Weston Science Scholars program run by the Montclair High School in the town of Montclair, NJ. Small groups of students work with faculty mentors in the mornings. At the end of the summer, students present the results of their summer activities. In 2007, two of the Weston Scholars used the Multiprobe and Rapid Plate to automate the acid—base titration commonly used in environmental analysis to determine the alkalinity of surface water. In this analysis, water containing a bromocresol green indicator is titrated with a dilute acid. The amount of acid it takes to neutralize the sample is indicative of the water body's acid neutralizing capacity. 7
The Weston Scholars learned to use the Multiprobe to perform a serial dilution in a 96-well plate. The Rapid Plate was then used to add the acid. The Rapid Plate's deck setup for this procedure is shown in Figure 2. Because the titration had a colorometric end point, the results could be determined by simply looking at the wells. The test was easy to understand, provided instant feedback to the students, and measured an environmentally relevant parameter.
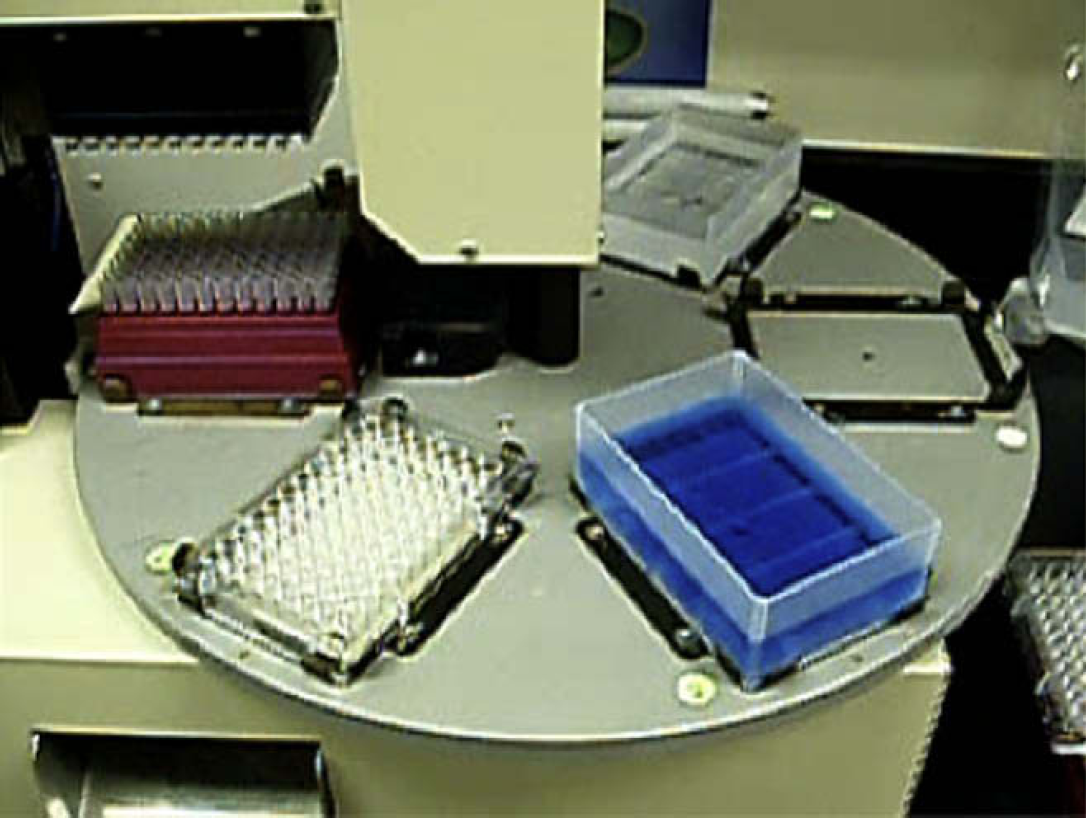
The deck layout of the Rapid Plate for the alkalinity titration. The bromocresol green indicator solution is adjacent to the microplate that contains pond water samples that have been serially diluted. The reservoir containing acid is in the rear of this photograph. Courtesy Ben Grund and Tristan Sinofsky, Weston Science Scholars Program.
The author has been largely unsuccessful in bringing robotics into the students' capstone undergraduate research experience. Although many students use microplates and microplate instrumentation, the sample throughput has not justified automating procedures. Time constraints also prevent many students from wanting to learn the systems.
Future Plans
With the addition of new faculty members with drug discovery automation experience, the department is actively planning a medium or low throughput assay robotics. We also hope to incorporate automation into the analytical chemistry and instrumental analysis classes, especially for sample preparation.