
Abstract
As parallel experimentation workflows become more complex, additional functionality and capability is required from laboratory robotics. These robotic platforms are no longer being used exclusively for liquid handling or for dedicated workflows but are being tasked to support a variety of analytical probes, heated tips, vial grippers, and a variety of other functions. To respond to this need, Symyx Technologies (Santa Clara, CA) has introduced the Extended Core Module (XCM) robotic system. The XCM features a robust robotic platform designed with a unique architecture that enables the straightforward addition of functionality through self-contained elements. These elements only require power, pneumatic connections (if required) and communication connections, which are provided by standard interfaces within the XCM deck. The XCM operates using Symyx Technologies, Inc. Renaissance® Software. Several workflows have been built using the Symyx XCM configurable architecture, encompassing both chemical and pharmaceutical workflows, and are described herein.
Introduction
Automation is well established within the pharmaceutical discovery research departments. 1 Over the past several years, there have been efforts to apply automation and high-throughput techniques in various development labs in which automated systems have been set up to serve dedicated workflows. For example, there are a number of automated reactor systems that have been used for synthesis, screening, and process optimization.2–6 In addition, automation has also been applied in polymorph workflows, which apply the same essential workflow to a pipeline of new materials.7, 8 Although these examples highlight that automation has been successfully applied to dedicated workflows, there is a need for more flexible automation systems to serve shorter term project and specialty applications. Symyx Technologies, Inc. (Santa Clara, CA), through its Discovery Tools® program, has created the Extended Core Module (XCM) robotic platform with a common software and hardware platform that allows full integration of a variety of modular components that can be set up for a given application and reconfigured to address changing needs.
The XCM robot provides the basic building block of many of Symyx workflows. The XCM consists of a configurable three-axis Cartesian robot, pump housing, and deck, which can be outfitted with various functional elements. This configurable architecture allows users to customize the hardware for specific workflows by adding the appropriate elements to the XCM robot (Fig. 1). This robot offers more than liquid handling, and examples of the additional functionality include parallel overhead stirring, viscous dispense tips, friction/force probes, high-temperature dispense tips, vial grippers, plate grippers, pH probes, and a variety of configurable deck units including a balance for feedback control of viscous materials dispensing, heating/cooling/stirring zones, vortexing zones, and a sample imaging station. Robot configurations could range from a simple, general purpose, liquid-handling robot to a configuration that also includes the sample processing and analytical capabilities required for a complex workflow.
The XCM robot features a robust robotic platform designed to enable the addition of functionality through self-contained elements.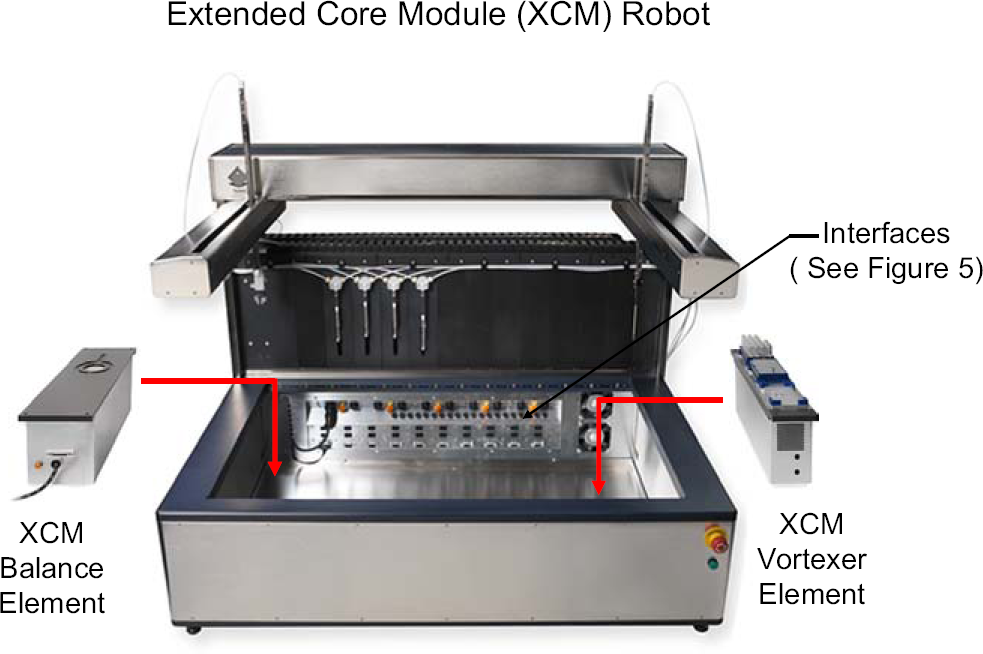
Each aspect of the XCM has been designed with standard interfaces to maximize the platform's flexibility. For example, the robotic arms have been designed such that future upgrades such as variable pitched Z-racks, powder handling, or other technologies can easily be integrated into the system. The XCM also allows for the addition of a third robotic arm. Additionally, the standard XCM interfaces allow Discovery Tools customers as well as third-party developers to develop and integrate their own custom XCM elements.
Users control the XCM through Renaissance Impressionist® Software. Renaissance Impressionist® Software is a general laboratory automation package for creating and executing laboratory procedures. Each element of the XCM contains an Impressionist software “resource”, which defines the underlying communications protocols for each device contained within a particular element. For example, the heated stirring element has resources for the stir motor controller, heater controller, and the over-temperature controller. Configuring Impressionist for a specific XCM configuration is simply a matter of selecting those resources that correspond to the hardware devices connected to the XCM. This approach allows devices of the same type (i.e., Watlow temperature controller vs an Omega Temperature controller) to be used interchangeably by procedures even if the underlying communications protocols are different. Renaissance Impressionist currently supports over 140 resources that manage communications with individual hardware devices. In addition, users can extend capabilities to new elements by using the Impressionist Developer's Kit. This allows Discovery Tools customers to develop their own custom XCM software resources to be used with any proprietary or custom elements.
Discussion: application of the XCM to various workflows
The XCM is designed to be the central enabling technology of many different workflows. One workflow that uses the XCM is the Solubility and Liquid Formulations workflow. This workflow accelerates the process of making solubility measurements in addition to preparing and testing liquid formulations, starting from either solid forms or solutions of active pharmaceuticals and intermediates. 9 As the key component of the workflow, the XCM is responsible for formulating and processing samples. Robotic activities include dispensing solvents and buffers, measuring or adjusting the pH, heating, cooling, stirring and filtering samples, and making serial dilutions for subsequent chromatography measurements.
The XCM is also used in the Symyx Technologies Automated Forced Degradation Tool. 10 This is a modular system that integrates the XCM with a plate-handling robot and a variety of stability chambers. This system is designed to allow a scientist to perform multiple automated stress testing and drug-excipient studies by exploring the effects of environmental exposure (temperature, humidity, light) and chemical exposure (acid, base, peroxide, radical generator, or other oxidizers) on arrays of solid and solution samples. This system uses an XCM with an integrated on-deck balance to enable mass tracking of various dispenses, aliquots, and dilutions to improve the accuracy of these studies.
Although there are many workflows in preclinical pharmaceutical development that can use the XCM, workflows in the chemical sector also use XCM. For example, in polymer formulations development there is a need to dispense and mix high-viscosity polymer melts and solutions. Using the XCM balance element and arms enabled with tools to handle highly viscous materials, one can dispense difficult materials with feedback onto the deck and subsequently do further processing. For these types of materials, there are several strategies that can be used. For example, you can use a pressurized source and dispense materials with a software-controlled metering valve at the tip. Second, you can use a high-temperature, high-volume tip that is able to aspirate hot melts of materials and transfer them to destination vials. Figure 2 shows results of dispensing viscous components using feedback from an on-deck balance. The data show that both of these nonstandard liquid-handling strategies can be used to improve the dispense accuracy of viscous materials. In addition, the system records how much mass was dispensed, and the software can be used to correct for the volume of the rest of the components in the formulation.
Dispensing viscous materials with feedback from an on-deck balance.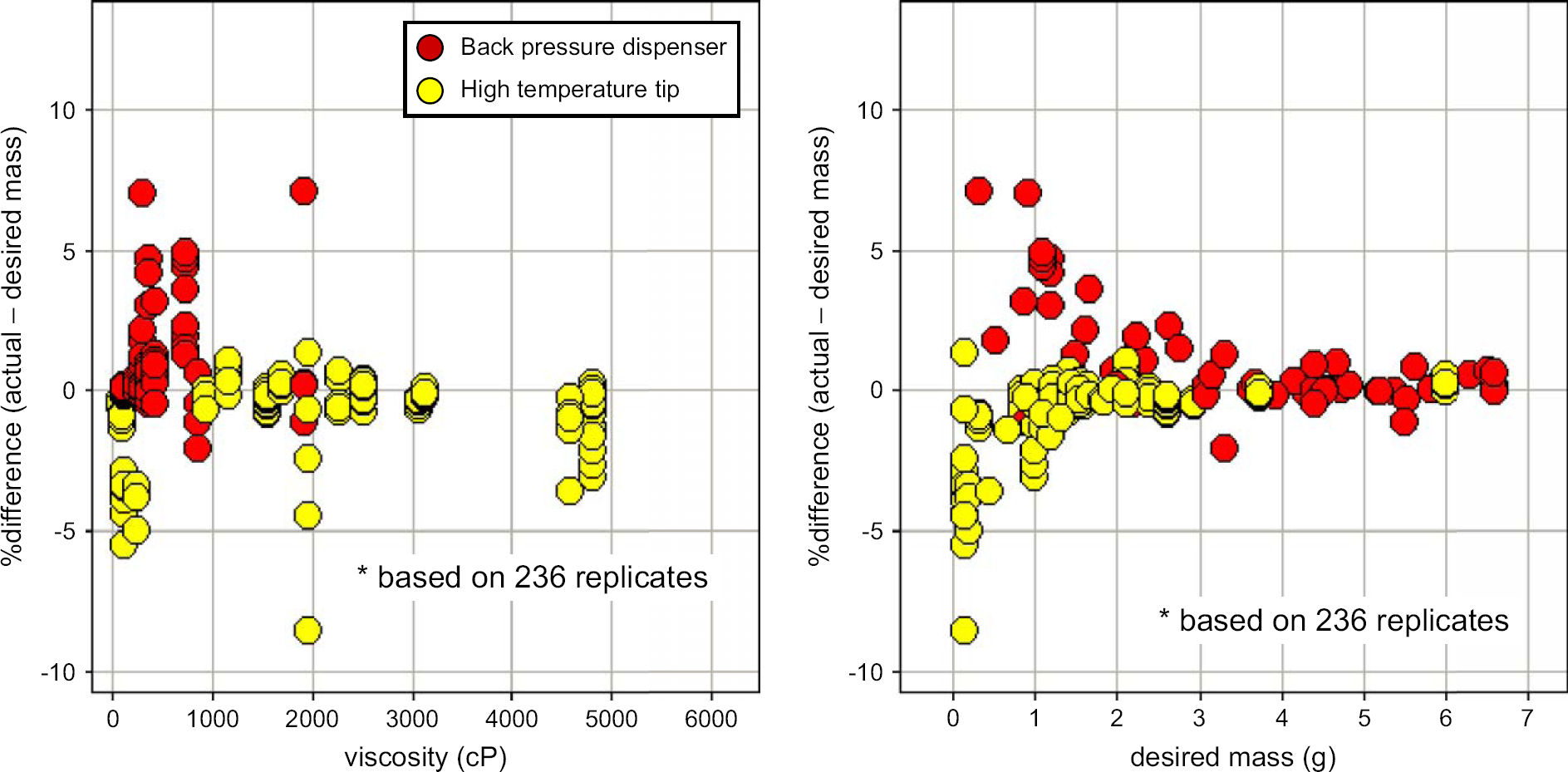
The XCM can also be used to perform robotic testing beyond materials dispensing. For example, it can be configured as part of a coatings workflow to perform sample analysis. Figure 3 shows a robotic arm configured with force sensors that are able to measure normal and lateral forces imparted to a probe tip. The XCM can then be directed to move across a prepared coating formulation with a given load and measure the resulting frictional force. Figure 3 shows the measured friction forces for a set of polymer coatings.
Robotic probe used to perform friction measurements on coating formulations.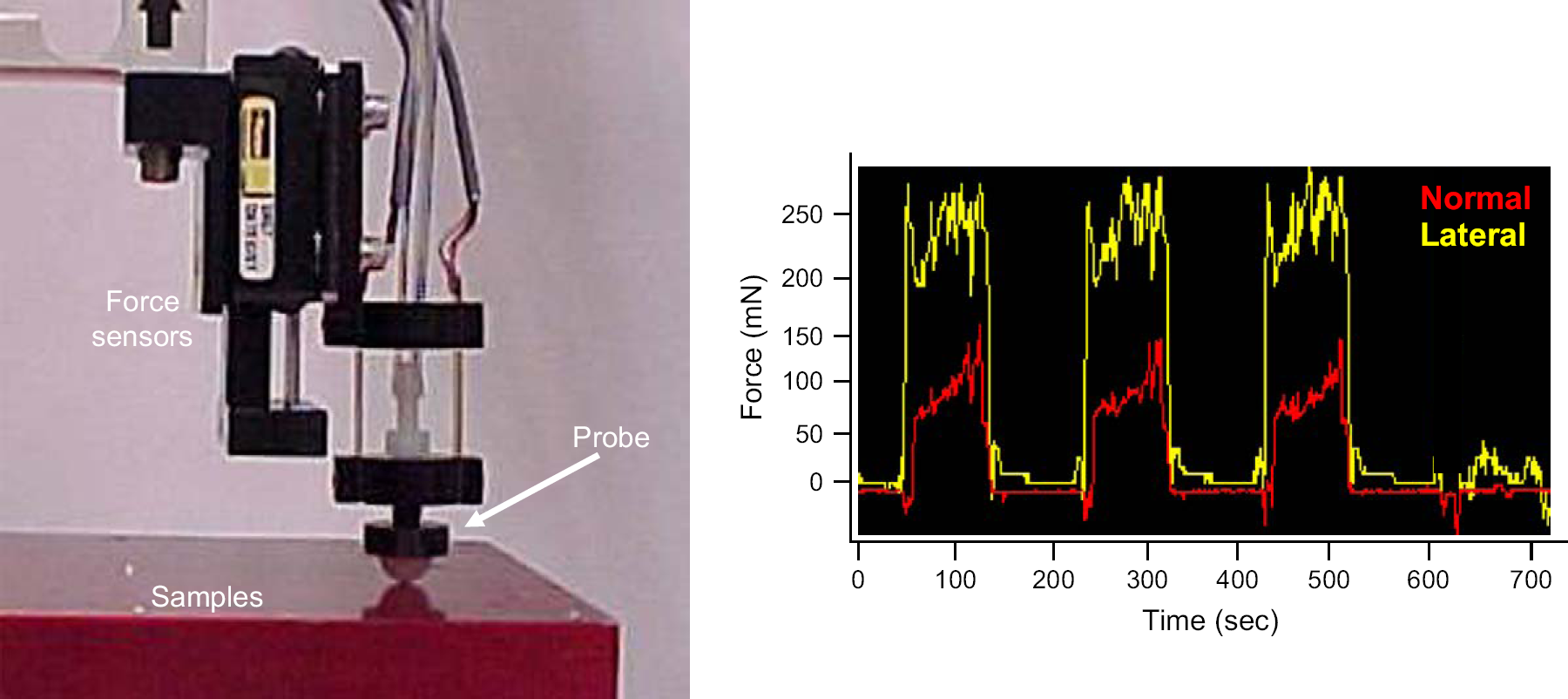
Technical details
The XCM robot (Fig. 4) consists of a “backplane”, one to three “arms”, a pump housing, and a deck. The backplane provides structural support and guidance for the arms to move from left to right. Each arm consists of a minimum of one drive motor to move itself along the backplane. Each arm contains drive motors, controllers, and drivers for each axis of motion. Additionally, each arm includes a standard interface on the end of its Z-rack to support a variety of standard robotic tools based on the required workflow. Examples of end-effectors include liquid handling, material handling, plate and vial moving, mixing heads, and instrumented probing (i.e., temperature, pH).
The XCM consists of a “backplane”, one to three “arms”, pump housing, and a deck.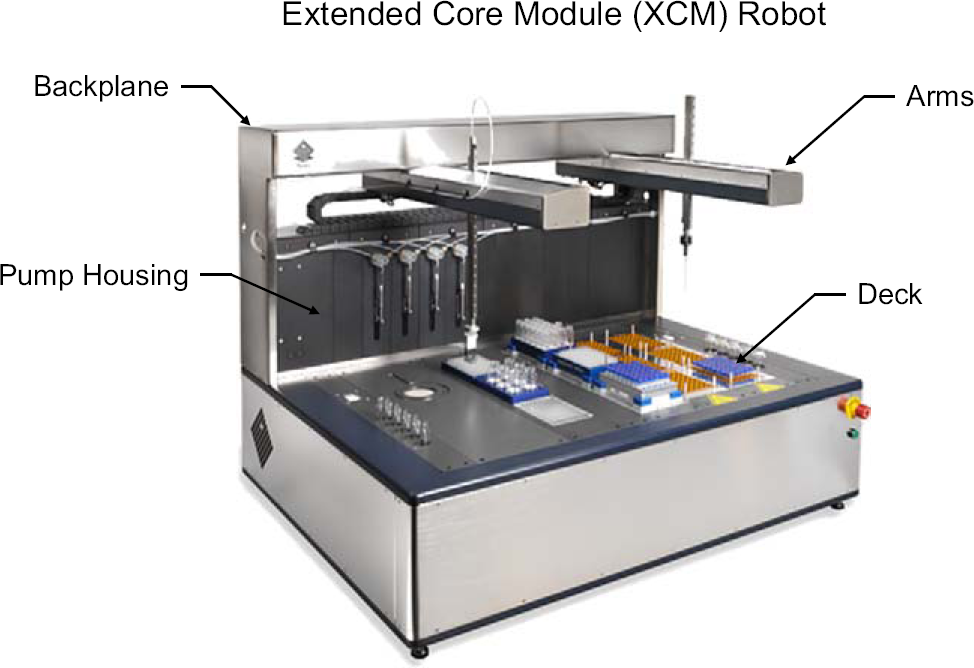
The pump housing is designed to interface with off-the-shelf syringe pumps, peristaltic pumps, or any ancillary electronic elements required to support equipment such as a heated tip on the robotic arm. An optional information display may be added to the pump housing, allowing a user to monitor critical information such as temperature, stirring speed, or other user-defined variables.
The deck provides a work area for the robot and consists of mechanical, electrical, and communication interfaces to support the functional elements. Each element interface includes a tooling pin to accurately locate the element within the deck, communication protocols using RS232, RS485, and universal serial bus (USB), and electrical outlets for 208 voltage alternating current (VAC), 48 voltage direct current (VDC), and 24 VDC. Additionally, 18 channels of digital Inputs/Outputs (I/O) are provided for use across all elements (Fig. 5).
The XCM robot features a standard electrical and communication interface using RS232, RS485, USB, as well as 18 channels of digital I/O and outlets for 208 VAC, 48 VDC, and 24 VDC.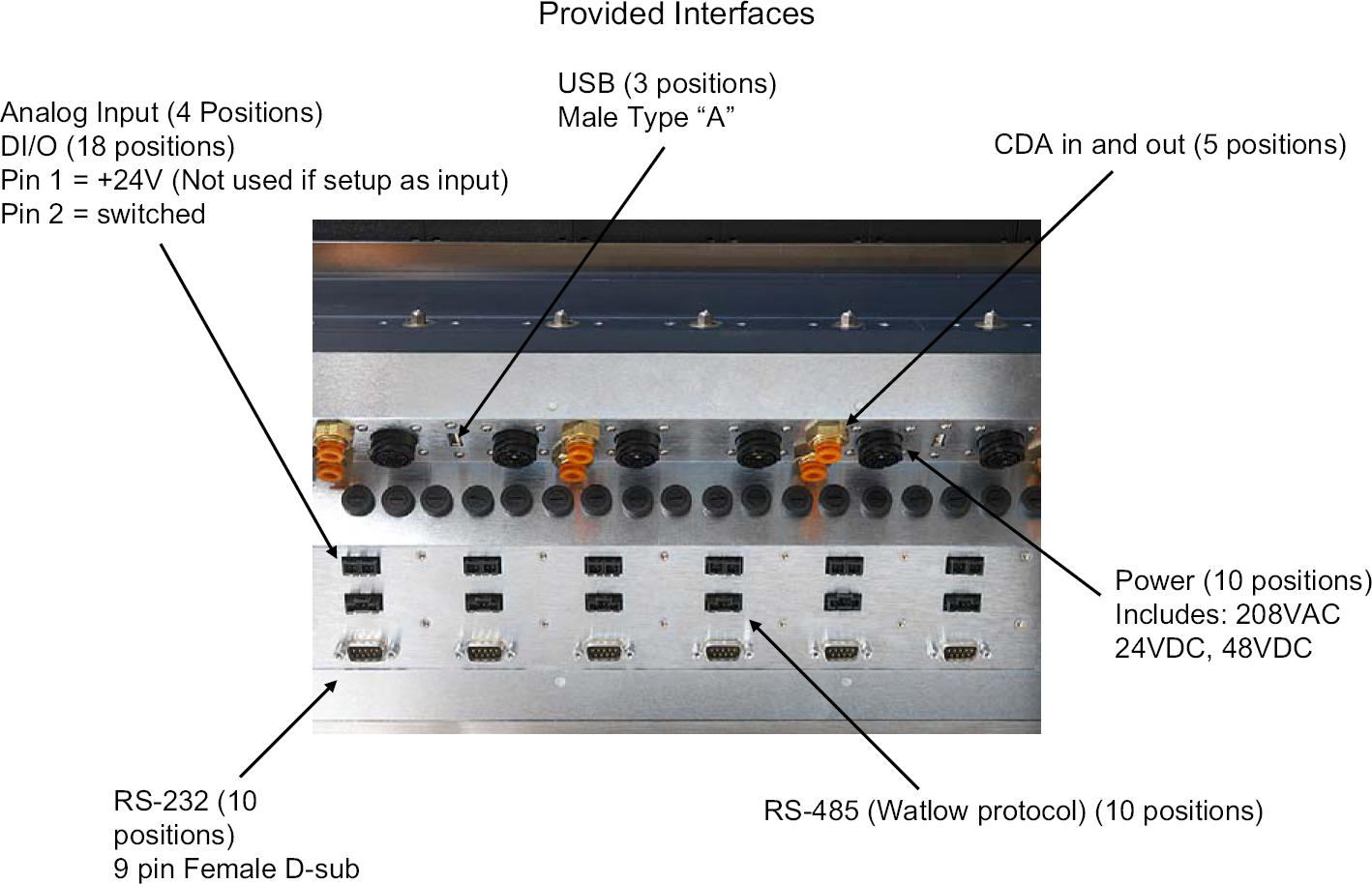
Each XCM element is a self-contained assembly with its own control electronics connections (i.e., temperature control, over-temperature protection, motor control, etc.). These elements only require power, pneumatic connections (if required) and communication connections, which are provided by standard interfaces within the XCM deck. This stand-alone functionality also allows each element to be fully tested and qualified on the bench prior to being installed in the XCM. Each element is designed based on a standard “unit” width with the standard XCM deck having room for 14 “units” total. For example, an element for the heating and stirring of mictotiter plates has a width of two “unit” elements, whereas a balance element has a four “unit” width.
The heated stirred element has the ability to heat three microtiter plates up to 200 °C and magnetically stir up to 750 rpm. It contains an independent over-temperature control circuit to disconnect power in the event of an anomalous thermocouple reading or component failure. Other elements available for the deck include a 0.01-mg-resolution balance, a vortex stirrer, a vertical shaker for powder mixing, and several standard wash stations (Fig. 6).
Each XCM robot “element” is a self-contained assembly with its own control electronics.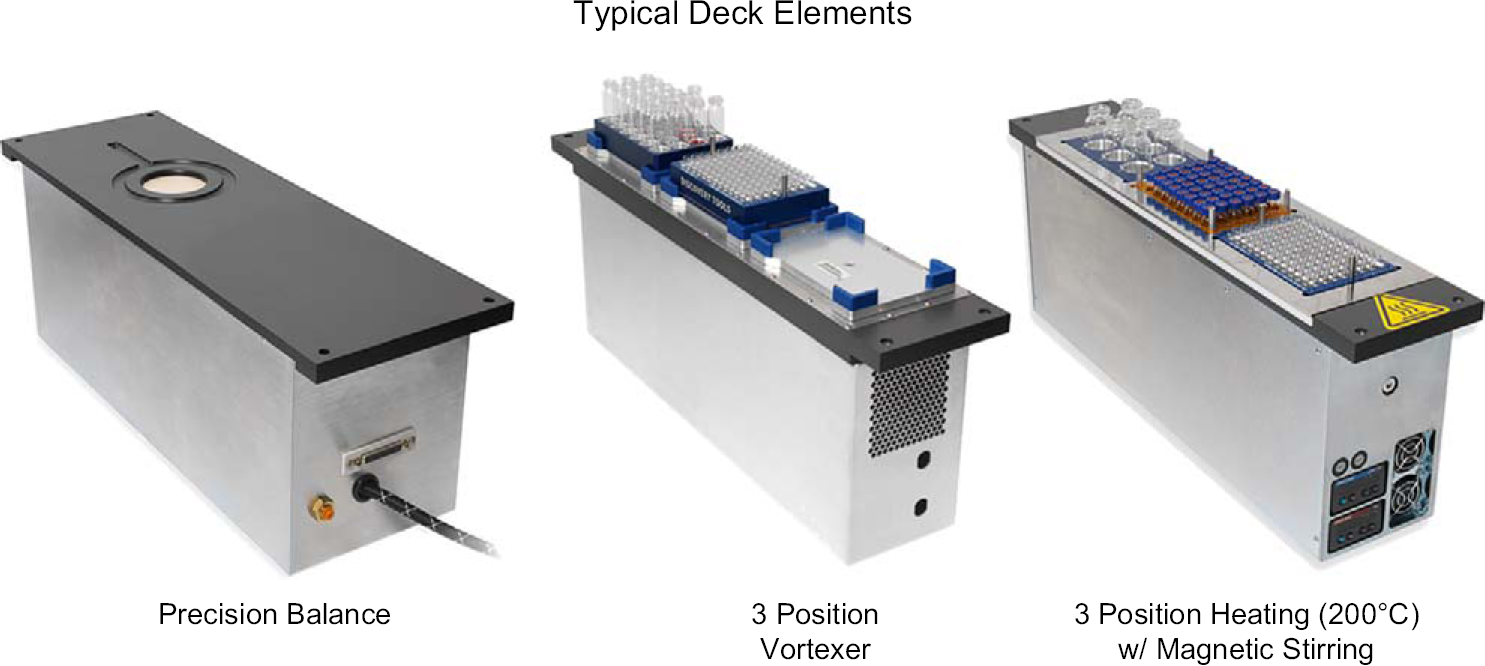
Conclusions
The ability to have modular hardware and software allows the scientist to change their configuration as required to meet a wide variety of requirements. The XCM provides a flexible platform that greatly reduces the time required to reconfigure a workflow as requirements change or technologies evolve. This allows automation to be deployed in labs that run many short-term projects that have not traditionally been able to take advantage of automation techniques. End users also have the opportunity to develop their own proprietary elements as required for their specific workflows using the standard XCM interfaces provided by Symyx Technologies, Inc. This modular approach to laboratory automation is intended to allow the scientist to be more productive and to apply automation techniques to a broader range of development projects.
For additional information, e-mail