
Abstract
The objective of this study is to verify if only the use of robotic force feedback enables indirect and dynamic manipulations which are difficult for human beings to perform. Human beings usually control the trajectory of an object using visual feedback; force/tactile information are secondarily employed because they are further qualitative in comparison with visual information. However, it is supposed that robots have the potential to perform such the tasks without visual information because force/tactile information can be also used quantitatively in the control system. This paper especially focuses on an indirect manipulation of a sphere on a flat plate realized by employing only force information. In this paper, we propose a very simple method to estimate the position of the sphere on the plate which is put on a multi-fingered robot and try to control the trajectory by changing the fingertip heights based on the error between the desired and estimated positions. We also analyze the stability of the proposed control system with an approximate Lyapunov's stability criterion. Finally, this paper shows very attractive robotic demonstrations based on the proposed method.
Introduction
In our daily life, human beings can bring an object on a flat plate by dexterously controlling the inclination of the plate. For example, a waiter/waitress working in restaurant can carry a number of dishes with various shapes on a tray to customers without dropping them. Even people with no experience of working in the restaurant could achieve the similar task without any special practices. However, this task would become very difficult as soon as we close our eyes; just bringing the objects without visual cue might be possible, but controlling the trajectory of objects on the plate would be impossible. This is because human beings basically rely on visual information which contains the largest number of external information in our sensory system. Only the use of force and tactile information would not be enough to perform it. In such the task, the visual information is basically used to know the position of the object and to estimate the movement at the next instant (Marr, D., 1982). Owing to the visual feedback, human beings can generate the proper force and adjust the behavior to achieve the task (Flash, T. & Hogan, N., 1985, Uno, Y., Kawato, M. & Suzuki, R., 1989, Kawato, M., 1996). In a series of this process, it is supposed that human beings employ force/tactile information as just subordinate information that assists the visual feedback, as shown in Fig. 1.

A schematic diagram of manipulating an object on a plate based on sensory feedbacks
So far, many researchers have reported studies on robotic manipulations. The grasping of an object by a multi-fingered robot has especially attracted considerable interests (Nakamura, Y., Nagai, K. & Yoshikawa, T., 1989, Ponce, J., Sullivan, S., Sudsang, A., Boissonnat, J. & Merlet, J., 1997, Wang, M. Y. & Pelinecu, D. M., 2001, Harada, K., Kawashima, T. & Kaneko, M., 2002, Arimoto, S., Yoshida, M. & Bae, J. H., 2006, Inoue, T. & Hirai, S., 2007). For example, Kerr and Roth expressed the manipulation of an object by multi-fingered robots as the equilibrium of forces applied on the object and described the force distribution at robot fingertips in the early stage (Kerr, J. & Roth, B., 1986). Shimoga clearly organized previous computational algorithms in multi-fingered robotic hands (Shimoga, K. B., 1996). Recently, Arimoto et al. demonstrated a stable “blind grasp” that means the grasping without object information or external sensing. In general, these studies assume to be either form closure or force closure (Reuleaux, F., 2008, Dizioğlu, B. & Lakshminarayana, K., 1984, Nguyen, V., 1988). That is, the object should be geometrically constrained or the robot fingers can generate an arbitrary resultant force and moment to the object. However, for manipulating an object on a flat plate, the non-form and non-force closure states should be considered like graspless manipulation (Aiyama, Y., Inaba, M. & Inoue, H., 1993, Mason, M. T., 1999, Omata, T. & Nagata, K., 2000, Maeda, Y. & Arai, T., 2005). In addition, we have to consider the existence of plate between the object and robot. Hence, it should be noted that achieving such the indirect task requires more advanced techniques to realize the stable manipulation in comparison with the conventional manipulations.
The main purpose of this study is to challenge the trajectory control of an object on a flat disk, which might be difficult for human beings to perform (Hara, M., Tanaka, Y. & Yabuta, T., 2005). In this study, we employ a multi-fingered hand to achieve the purpose, but the significant point is that only the force information can be available for the control. A simple method for estimating the sphere's position on the disk, which is based on force information at the robotic fingertips, is proposed. Further, a simple control system with the estimated position information is designed and the stability is analyzed with an approximate Lyapunov's stability criterion. Finally, this paper implies the applicability of proposed concept for the robotic manipulation and examines the performance by using a multi-fingered robot; the results show very attractive robotic manipulations.
Hardware System
Figs. 2 and 3 show a picture of multi-fingered robot and the schematic diagram of experimental system, respectively. The hardware system mainly comprises of three robot fingers, each having three degrees of freedom, manufactured by Yaskawa Electric Corporation. Each robot finger has a three-directional force sensor on the tip, which has a limited capacity of 10 N. Each joint actuator includes an optical rotary encoder with a resolution of 512 P/R; the decelerator in the actuators is a harmonic gearbox with a reduction ratio of 1/80. Tables 1 and 2 show the main specifications of the robot-finger system and force sensor. The operational range of each joint actuator is within −100 to +135 deg. The rated torque of each actuator is 11.04 × 10−3 Nm; however, it should be required that the robot finger is manipulated by a force below the limited capacity of the force sensor. In this system, the control mode is the torque/current control mode and the sampling rate is set at 5 ms.
Table 3 shows the specifications of other experimental equipments. A crystal sphere is employed whose trajectory is controlled on a flat plate that is just put on the three robot fingers; the size and weight of the sphere are φ49 mm and 160 g, respectively. The flat plate on which the crystal sphere is placed is an aluminum disk with 190 mm in diameter and 1 mm thickness. On the back of the disk, a rubber mesh is attached in order to reduce the slipping between the robot fingertips and disk. There is no mechanical constraint between them, such as the universal joint component; the disk is just placed on the robot fingers. Hence, adjusting the inclination of the disk by the heights of robotic fingertips is the only way to control the trajectory of the sphere on the disk.

Multifingered robotic system

Schematic diagram of the experimental system
Specifications of robot finger

Specifications of force sensor

Specifications of experimental equipment

In this paper, we assume the robot fingers arranged in a regular polygon. The global coordinate system can be basically defined on the center of gravity (COG) in a regular n-polygon formed by robot fingertips; n also indicates the number of the robot fingers. If three robot fingers are assumed as shown in Fig. 3, the coordinate system is defined on COG of an equilateral triangle formed as shown in Fig. 4. In Fig. 4, p
g
∈ R2times1 indicates the contact point of the sphere with the disk.

Definition of the coordinate sytem

Relationship between the inclination of disk and the orientation of coordinate system
As shown in Fig. 3, the experimental system has no external position and velocity detectors for the sphere on the disk such as a motion-capture system. In order to control the sphere without any external sensors, it is necessary to estimate the position of the sphere by using the other information obtained from the robot fingers. This chapter describes a method for estimating the position and velocity of the sphere on the disk by using the force information sensed at the fingertips.
Position Estimation of the Sphere
First, it is necessary to measure the default weight of disk W acting on each robot finger when the disk is just placed on them. This offset weight should be removed from the force measured at the fingertips in order to extract the weight distribution due to the sphere on the disk across the robot fingers. Generally, the effect of W may depend on the posture of the disk. However, the change can be considered as being very small since the robot fingers cannot generate a large inclination of disk owing to the kinematics constraints. Thus, this paper assumes that W is always constant value during the manipulation. Here, let f
z
∈ Rnx1 be the measured force vector at the robot fingers in the vertical direction. The distributed force f ∈ Rnx1 on the robot fingers due to the sphere is calculated by removing W from f
z
:
Hence, the contact point p
g
is given as follow:
where J
t
is the transmission matrix from the distributed force to the contact point that is given by solving a unique equilibrium equation related to the moment around the center of rotation. When the robot fingers are arranged as shown in Fig. 4, the equations of equilibrium about the center of rotation are given as follows:


where f1, f2, and f3 are the distributed force across the three fingers. In this case, J
t
is represented as follow:

Hence, the contact point of the sphere 

Equations (6) and (7) cannot function when there is no sphere on the disk. This is because J
t
becomes an infinite value when f =

Position data of the sphere on the disk estimated from the force information
The velocity of the sphere is basically calculated by using a simple numerical differentiation:

where 

Velocity of the sphere calculated from the estimated position
Equation (9) is so-called a simple moving average (SMA). In this equation, N is an averaging number that determines the filtering effect. The noise cannot be eliminated well when N is too small; on the other hand, the accurate velocity cannot be measured when N is too large, which may have a worse effect on the control system. In this study, N is experimentally determined as 50. The changes in the averaged velocity of the sphere are shown in Fig. 7 (b). As shown in Fig. 7 (b), the averaged velocity has almost no noise caused by the numerical differentiation with equation (8). In fact, the SMA causes a delay in the response and the delay would be outstanding when controlling the sphere in high speed. However, this delay influence could be ignored because the main objective of this study is not high-speed control of the sphere on the disk.
The underlying concept for the trajectory control of the sphere on the disk is to generate an external force due to the gravity by inclining the disk. The inclination can be realized by adjusting the heights of robot fingers with a position control. This chapter fundamentally describes the concept when using three robot fingers arranged as shown in Fig. 4; the basic idea might be the same in the case of more than three robot fingers.
Position Control Algorithm of the Sphere on the Disk
Figs. 8 (a) and (b) show the inclinations of disk that generate the movement of the sphere in the X and Y directions, respectively. This study assumes that the movements in both directions are decoupled; this assumption is satisfied when the movement of the sphere is relatively slow. As shown in Figs. 8 (a) and (b), the inclination can be generated by the relative-height relationship among the robot fingertips. In Fig. 8, the three robot finger heights are defined as h1, h2, and h3. Δh
x
and Δh
y
are the differences of heights, i.e., the controlled values that generate the external force in each direction. Hence, each robot finger height in this study is expressed as follows:



Inclination for gnerating the movement of the sphere on the disk
where h10, h20, and h30 indicate the reference heights of robot fingertips that possesses the same height. These relationships must be individually calculated based on the robot-finger arrangement when the other robot fingers are added. The inclination for generating the external force is produced by the difference in the fingertip heights with respect to C R . Therefore, adjusting Δh x and Δh y enables the inclination control of disk, i.e., the movement of the sphere on the disk.
As the next step, this study applies a very simple PD control concept to adjust Δh
x
and Δh
y
in order to automatically control the sphere's trajectory on the disk. The algorithm with the PD control concept is as follow:

where Δh = [Δh
x
Δh
x
]
T
∈ R2times1 is the vector of the difference among the fingertip heights that generates the movement of the sphere in the X and Y directions on the disk. 
Similarly, the velocity error vector 
As shown in equation (13), the position and velocity error vectors are converted into the required height differences for moving the sphere by using the PD control concept. That is, both the gain matrices,
This chapter examines the stability of the proposed control system based on the Lyapunov's stability criterion. The factors related to the movement of the sphere are shown in Fig. 9, which illustrates the model in a one-dimensional perspective, particularly, in the X direction. Further, this study assumes that the contact area of the sphere with the surface of the disk is significantly narrow, i.e., the sphere contacts the disk at a single point because the crystal sphere and the aluminum disk are sufficiently stiff. Based on this assumption, the motion equation of the sphere on the disk is expressed as follows:



Model of dynamic motion of sphere due to the inclination of the disk (X direction)
where m and g are the mass parameter of the sphere and the acceleration due to gravity, respectively. F
fri
∈ R2times1 is the friction force vector acting at the contact point. 
where I ∈ R2times2 is the inertia tensor. When the movement of the sphere in the X and Y directions are assumed to be decoupled, the inertia tensor I is simply expressed as the following diagonal matrix:

Further, if the slip between the disk and the fingertips can be ignored, then the relationship between the rotation angle vector and transfer value vector is given as follow:

Hence, motion equation (16) is converted to the following equation by using the above relational expressions.

The volume of the sphere employed in this study is not so large. Thus, the air resistance 
When θ
x
and θ
y
are sufficiently small, 
where 
From equation (13), 
Finally, the motion equation of the sphere is rewritten as equation (27):

Let the desired trajectory 


Hence, equation (27) is further modified to the following new motion equation:

where the diagonal matrices 

Hence, V is selected as Lyapunov's function candidate related to the error function 
Equation (35) satisfies the following static stability condition under 
In the Lyapunov's stability criterion, the stability condition is satisfied when dV/dt is negative. dV/dt is given by the temporal differentiation of equation (35).

Since M and K are diagonal matrices, the above equation is modified to equation (38):

Hence, the stability is this control system can be guaranteed when dV/dt satisfies following condition.
Equation (39) shows that the stability condition is satisfied when the damping matrix
Application of Addmitance Control
Based on the proposed method, we constructed a control system, as shown in Fig. 10. The notable point is that a compliance factor is also implemented in this control system, i.e., the admittance control is applied to control the robot fingers. The virtual dynamics in the discrete time system is represented as equation (40):


Schematic block diagram of the control system for the robot height adjustment for manipulating the motion of the sphere on the disk
where
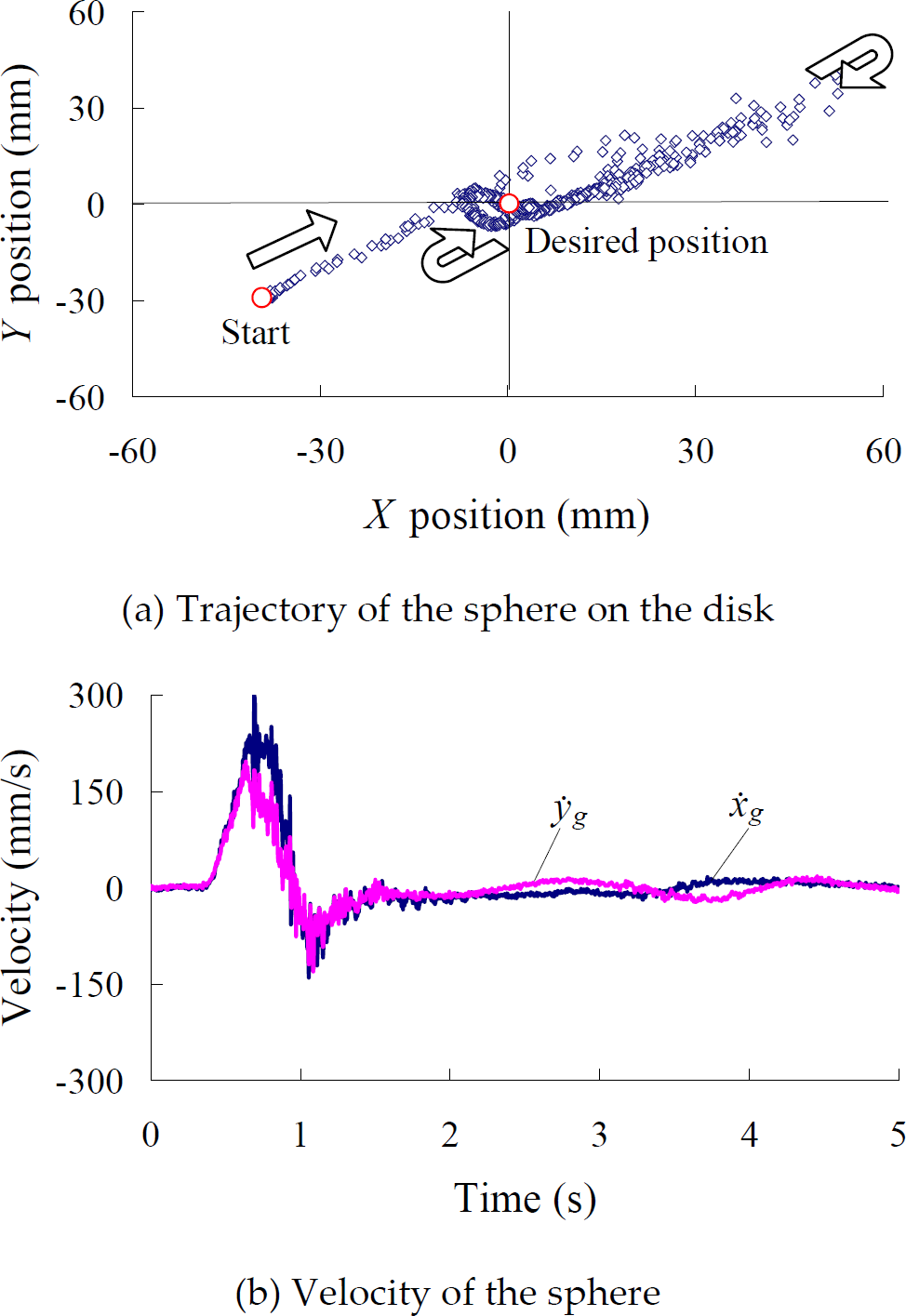
This section presents the most basic control performance when the external force is applied to the sphere, as shown in Fig. 11. Here, the desired position is set at the center (0, 0) of disk. Fig. 12 demonstrates the position control performances when the external force was applied at around the starting point (−30, 30). Fig. 12 (a) shows the trajectory of the sphere on the disk. It should be noted that the sphere moves in such a manner as to approach the desired position (0, 0). In addition, as shown in Fig. 12 (b), the velocity of the sphere is controlled to be zero owing to the damping factor of equation (13). On the other hand, Fig. 13 indicates the results when the damping factor is removed from equation (13), i.e., in the case of k d = 0. Fig. 13 (a) shows that the trajectory of the sphere moves in the undesired direction and never converges to the desired position. The velocity of the sphere also diverges as shown in Fig. 13 (b). These performances demonstrate that the damping factor k d in equation (13) is quite essential for the stable control of the movement of the sphere on the disk. This result agrees with the stability condition obtained by the approximate Lyapunov's stability analysis in chapter V.

Position control of the sphere to the center of gravity of the disk
Basic position-control performance to the center of the disk

Position control performance without the damping factor
In the stability analysis in chapter V, the desired position is considered as a constant value. Hence, the stability condition that k d should be positive definite has no guarantee for the dynamic manipulations. However, when the velocity of the sphere is sufficiently slow, the desired position is approximately regarded as a constant value within one step of sampling time on a regular basis. In this case, it is assumed that the stability condition can be effective within each step. In this study, we tried a few simple trajectories, such as a triangle trajectory, of the sphrere on the disk. Fig. 14 is the highlight obtained by using two different patterns of triangle trajectories: one is discrete-type trajectory, and the other is continuous-type trajectory. Fig. 14 (a) shows the result when three vertices of an equilateral triangle with 40 mm in a side are set as the desired positions; every 1 s, the desired position is changed in clockwise direction. Fig. 14 (b) shows the result when the three sides of equilateral triangle are applied as the desired trajectory. Both the results show that the robot fingers can approximately control the trajectory of the sphere through the disk, although there is some error between the desired and actual trajectories; it is assumed that this error is due to the delay in the control response.

Highlight in the triangle trajectories
This study further attempted a circular trajectory. The following simple equation is applied to the control system as the desired trajectory:

where r and f are the radius and the angular frequency of circular trajectory. In this experiment, the circular trajectory has 20 mm in radius and 0.5 Hz in angular frequency, respectively.

Highlight in the circular trajectory

Performance of the circular trajectory tracking
In this study, we have tried an indirect manipulation of an object, which is difficult for human beings to perform, by using a multi-fingered robot; in particular, we especially focused on the position control of a sphere on a flat disk. The significant point of this study is that we assumed the situation in which visual information is not available (only the force information could be employed) and the robot could not contact with the controlled object directly. Through the experiment, we also attempted to verify if the robot can achieve such the difficult task for human beings or not.
As the first step, an estimation method of the sphere's position was proposed to localize the sphere on the disk, in which the position is calculated by using force information distributed across the robot fingertips. Then, the velocity was calculated with a simple moving average. Using the estimated information, a control method for manipulating the sphere on the disk was proposed; the main idea is to enable a position control of the sphere by producing an external force due to the gravity which is generated by the inclination of disk. In this study, the appropriate inclination of disk for manipulating the sphere could be realized by controlling the robot finger heights. Then, a PD control concept was applied in order to convert the error between the actual and desired positions of the sphere into the height changes.
As the next step, we also analyzed the stability of proposed control method under static condition by means of Lyapunov's stability criterion. The result implied that the stability can be guaranteed when a damping factor is applied to the conversion from the position error of the sphere to the robot heights. Based on these, we actually applied the abovementioned methods with an admittance controller to a multi-fingered robot and examined the performance of position control. The results demonstrated that the proposed method enables the position control of the sphere on the disk when the obtained stability condition is satisfied. In this paper, we further tried the trajectory control of the sphere by providing the simple triangular and circular trajectories. The performance was really attractive and also implied that the stability condition under static condition is still effective in the dynamic manipulation when the movement of the sphere is relatively slow.
In conclusion, this paper presented a control method with a multi-fingered robot for enabling an indirect manipulation such as the position control of the sphere on a flat disk, in which only the force information is available. Basically, it would be very difficult for human beings to control a sphere through a flat disk with their eyes closed. However, the robot could have the potential to achieve such the task by compensating for the lack of visual information with force information. This implies that a robot has the possibility to exceed human performances in a certain condition. Hence, this study may shed further light on the novel robotic application. In future studies, we have a plan to integrate the proposed method with an arm robot and demonstrate more complicated and unique tasks by using the redundancy.