
Abstract
This paper analyzes the dynamic performance of two cooperative robot manipulators. It is studied the implementation of fractional-order algorithms in the position/force control of two cooperating robotic manipulators holding an object. The simulations reveal that fractional algorithms lead to performances superior to classical integer-order controllers.
Introduction
Two robots carrying a common object are a logical alternative for the case in which a single robot is not able to handle the load. The choice of a robotic mechanism depends on the task or the type of work to be performed and, consequently, is determined by the position of the robots and by their dimensions and structure. In general, the selection is done through experience and intuition; nevertheless, it is important to measure the manipulation capability of the robotic system (Y. C. Tsai & A.H Soni., 1981) that can be useful in the robot operation. In this perspective it was proposed the concept of kinematic manipulability measure (T. Yoshikawa, 1985) and its generalization to dynamical manipulability (H. Asada, 1983) or, alternatively, the statistical evaluation of manipulation (J. A. Tenreiro. Machado & A. M. Galhano, 1997). Other related aspects such as the coordination of two robots handling objects, collision avoidance and free path planning have been also investigated (Y. Nakamura, K. Nagai, T. Yoshikawa, 1989) but they still require further study.
With two cooperative robots the resulting interaction forces have to be accommodated and consequently, in addition to position feedback, force control is also required to accomplish adequate performances (T. J. Tarn, A. K. Bejczy, P. K., 1996) and (N. M. Fonseca Ferreira, J. A. Tenreiro Machado, 2000) and (A. K. Bejczy and T. Jonhg Tarn, 2000). There are two basic methods for force control, namely the hybrid position/force and the impedance schemes. The first method (M. H. Raibert and J. J. Craig, 1981) separates the task into two orthogonal sub-spaces corresponding to the force and the position controlled variables. Once established the subspace decomposition two independent controllers are designed. The second method (N. Hogan, 1985) requires the definition of the arm mechanical impedance. The impedance accommodates the interaction forces that can be controlled to obtain an adequate response. Others authors (Kumar, Manish; Garg, Devendra 2005, Ahin Yildirim, 2005, Jufeng Peng, Srinivas Akella, 2005) present advance methodologies to optimize the control of two cooperating robots using the neural network architecture and learning mechanism to train this architecture online. This paper analyzes the manipulation and the payload capability of two arm systems and we study the position/force control of two cooperative manipulators, using fractional-order (FO) algorithms (J. A. Tenreiro Machado, 1997) and (N. M. Fonseca Ferreira & J. A. Tenreiro Machado 2003, 2004 and 2005).
Bearing these facts in mind this article is organized as follows. Section two presents the controller architecture for the position/force control of two robotic arms. Based on these concepts, section three develops several simulations for the statistical analysis and the performance evaluation of FO and classical PID controllers, for robots having several types of dynamic phenomena at the joints. Finally, section four outlines the main conclusions.
Control of Two Arms
The dynamics of a robot with n links interacting with the environment is modelled as:

where τ is the n × 1 vector of actuator torques,
We consider two robots with identical dimensions (Fig. 1). The contact of the robot gripper with the load is modelled through a linear system with a mass M, a damping B and a stiffness K (Fig. 2). The numerical values adopted for the RR (where R denote rotational joints) robots and the object are m1 = m2 = 1.0 kg, l1 = l2 = lb = l0 = 1.0 m, α0 = 0 deg, B1 = B2 = 1 Nsm−1 and K1 = K2 = 104 Nm−1.
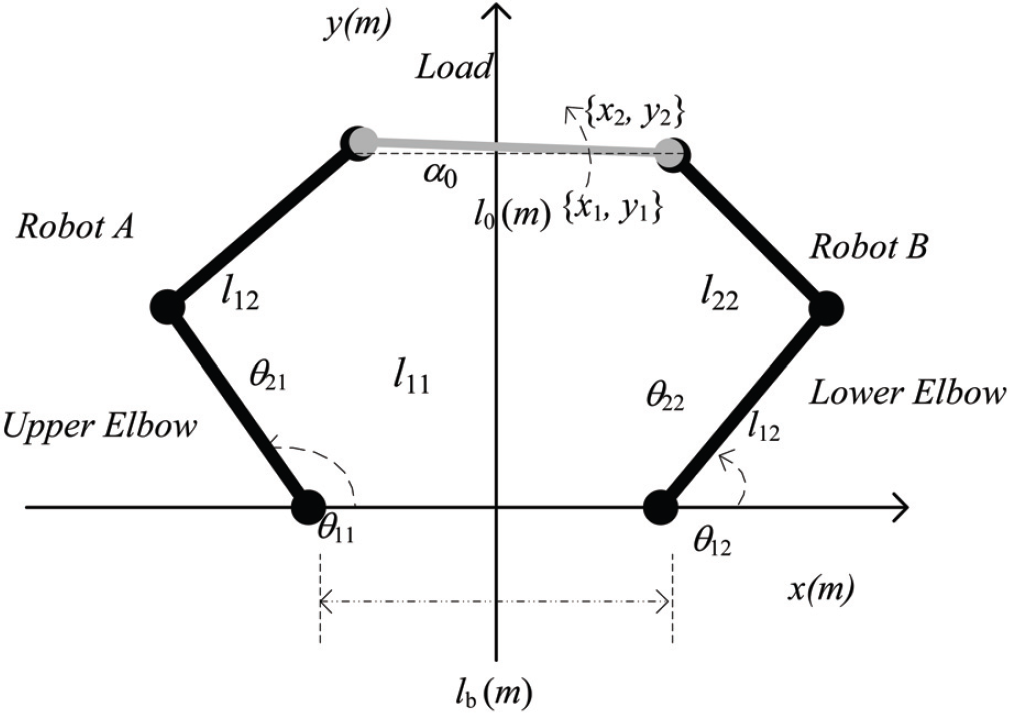
Two RR robots working cooperation for the manipulation of an object with length l0 and orientation α0.
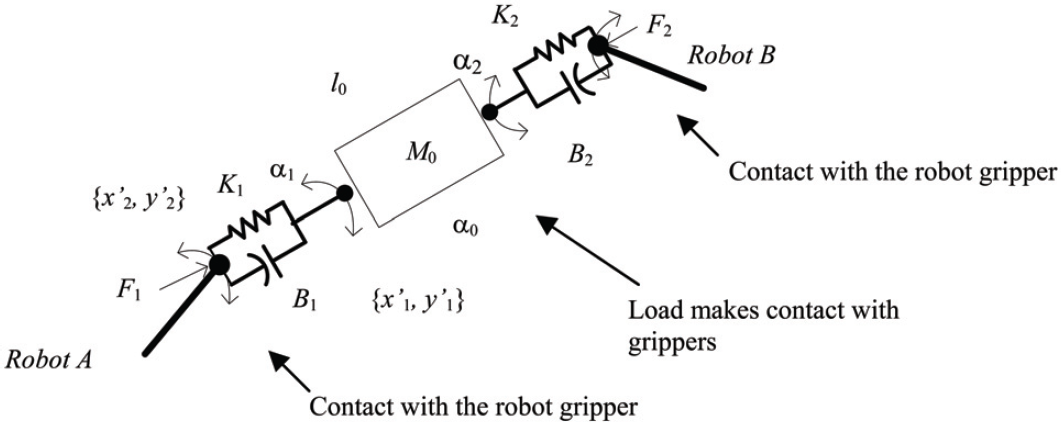
The contact between the robot gripper and the object.
The controller architecture (Fig. 3), is inspired on the impedance and compliance schemes. Therefore, we establish a cascade of force and position algorithms as internal an external feedback loops, respectively, where xd and Fd are the payload desired position coordinates and contact forces.

The position/force cascade controller.
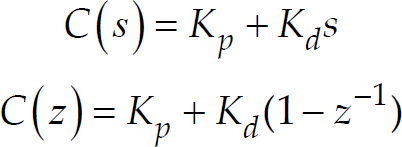
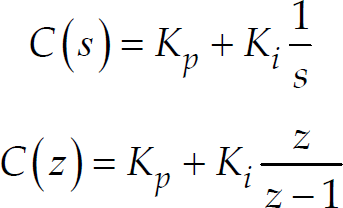
In the position and force control loops we consider FO controllers of the type

We compare the response with the classical PD–PI algorithms therefore, in the position and force loops we consider, respectively.
Both algorithms were tuned by trial and error, having in mind getting a similar performance in the two cases (Tables 1 and 2).
The parameters of the position and force FO controllers.

Position controller Force controller
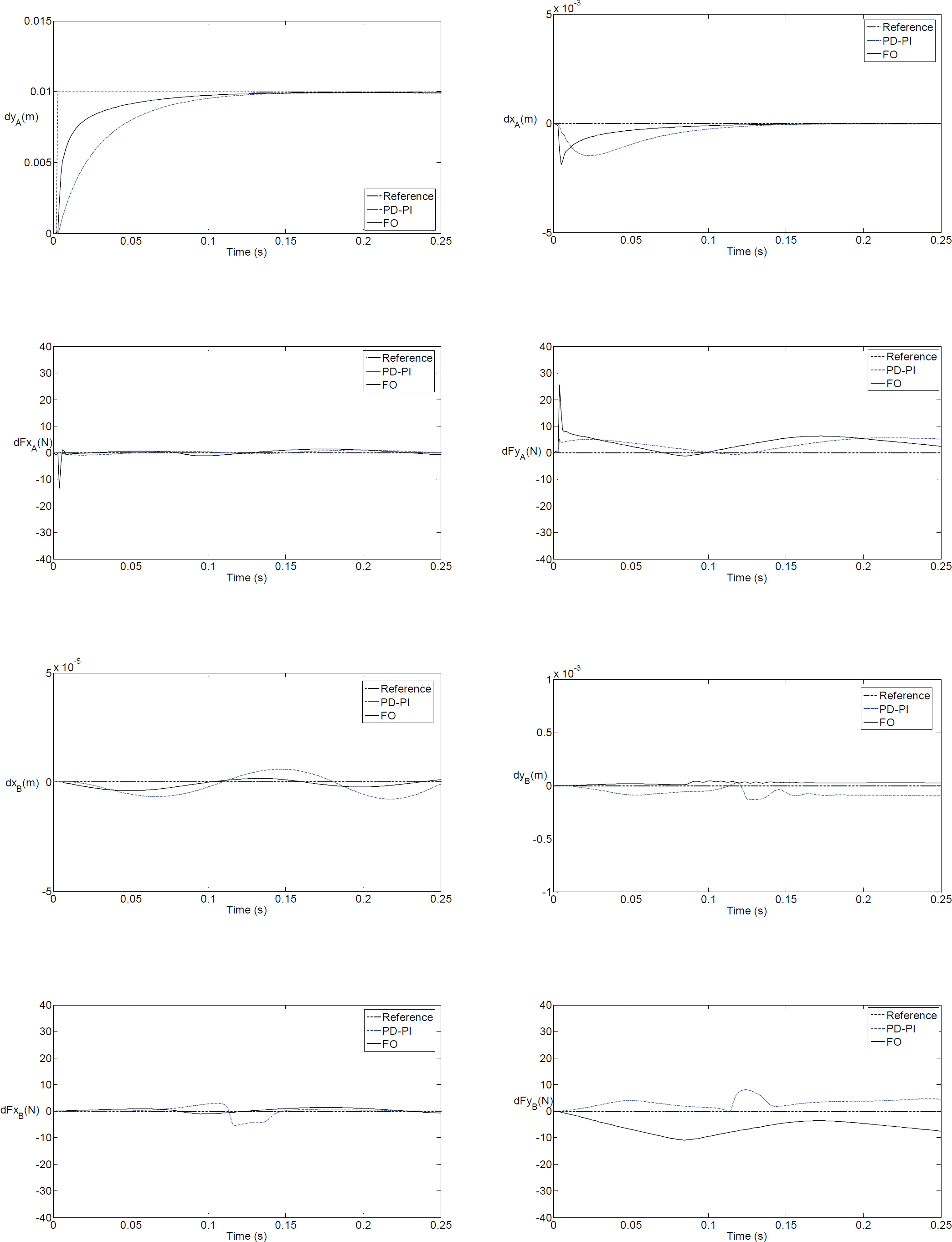
The parameters of the position and force PD-PI controllers.
Position controller Force controller
In order to study the system dynamics we apply a small amplitude rectangular pulse δyd at the position reference and we analyze the system response.
The simulations adopt a controller sampling frequency fc = 10 kHz, contact forces of the grippers {Fxj, Fyj} ≡ {0.5, 5} Nm, a operating point of the center of the object A ≡ {x, y} ≡ {0, 1} and a load orientation of
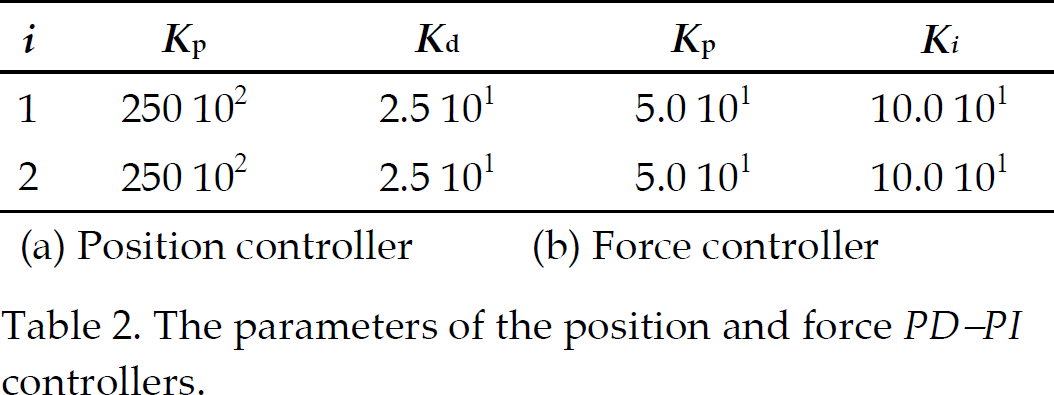
In a first phase we consider robots with ideal transmissions at the joints. Figure 4 depicts the time response of robot A under the action of the FO and PD-PI algorithms.
Time response for robots A and B with ideal joints under the action of the FO and the PD-PI algorithms for a pulse perturbation at the robot A position reference δyd = 10−3 m and a payload with M = 1 kg, Bi = 10 Nsm−1 and Ki = 103 Nm−1.
In a second phase (figure 5) we analyze the response of robots with dynamic backlash at the joints. For the ith joint (i = 1, 2), with gear clearance h
i
, the backlash reveals impact phenomena between the inertias, which obey the principle of conservation of momentum and the Newton law:

Time response for robots A and B with joints having backlash under the action of the FO and the PD-PI algorithms for a pulse perturbation at the robot A position reference δyd = 0.1 m and a payload with M = 1 kg, Bi = 10 Nsm−1 and Ki = 103 Nm−1.
where 0 ⩽ ɛ ⩽ 1 is a constant that defines the type of impact (ɛ = 0 inelastic impact, ɛ = 1 elastic impact) and
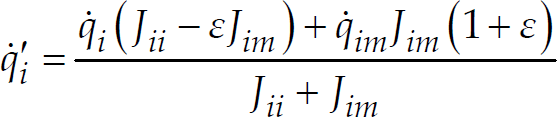
In a third phase (figure 6) we study the RR robot with compliant joints. For this case the dynamic model corresponds to model (1) augmented by the equations:



Time response for robots A and B with joints having flexibility under the action of the FO and the PD-PI algorithms for a pulse perturbation at the robot A position reference δyd = 0.1 m and a payload with M = 1 kg Bi = 10 Nsm−1 and Ki = 103 Nm−1.
where
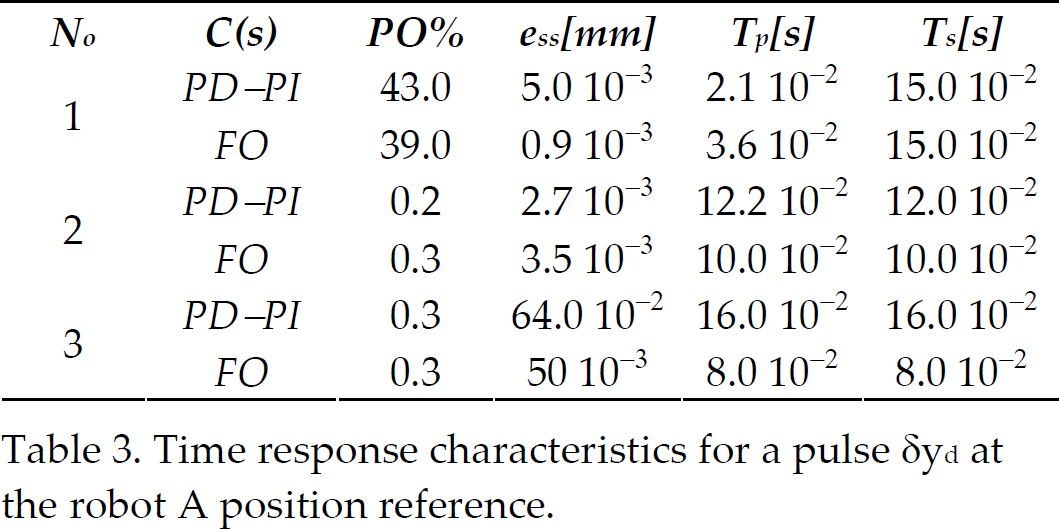
Time response characteristics for a pulse δyd at the robot A position reference.
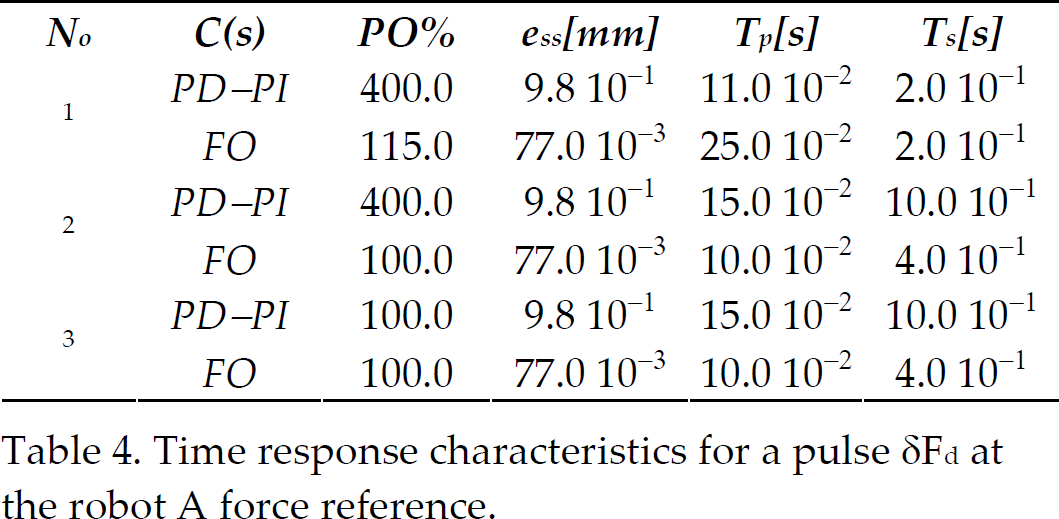
Time response characteristics for a pulse δFd at the robot A force reference.
This paper studied the position/force control of two robots working in cooperation using fractional and integer order control algorithms. The system time response was analyzed for manipulators having several types of dynamical phenomena at the joints. The transient response of the system shows the superior performance of the FO controller.