
Abstract
Cybernetic Transportation System (CTS) is a new branch of Intelligent Transportation Systems (ITS), which is a solution to the urban transportation problem. The coordination of intelligent vehicles is critical for the operation of the Cybernetic Transportation System. We present a distributed coordination approach for the intelligent vehicles of the Cybernetic Transportation System, which is based on an agent-based framework. Each vehicle agent generates intention independently by considering its and other agents' shared status and intentions in the coordination. Typical coordination scenes, including platoon and overtaking, have been demonstrated in the two-lane, two-way traffic situation and the effectiveness of the proposed coordination approach has been validated.
1. Introduction
The condition of urban transportation is becoming worse as the number of cars and trucks increases. The solution of this problem is to develop the Intelligent Transportation Systems (ITS), which can improve the road capacity and safety. A new branch of the Intelligent Transportation Systems is the Cybernetic Transportation System (CTS), which is suitable for urban transportation. The Cybernetic Transportation System is composed of a fleet of fully automated road vehicles, operating on either a simple route or an elaborate network to provide on-demand door-to-door transportation (Parent, M., 2007). These intelligent vehicles are controlled by onboard computers. They can navigate by themselves, coordinate by using communications, and therefore improve the efficiency and safety of urban transportation. The first Cybernetic Transportation System was put in operation at the end of 1997 in Schophol airport, Amsterdam (Alessandrini, A.; et al., 2005). The European CityMobil project is implementing the Cybernetic Transportation System in several European cities (Parent, M., 2007).
The coordination of intelligent vehicles is critical for the operation of the Cybernetic Transportation System, which is a popular research area with many open problems. Several frameworks for the coordination of intelligent vehicles have been proposed in the last two decades. For example, a hybrid hierarchical framework for the operation of the Automated Highway Systems (AHS) has been proposed in PATH project which consists of five layers (Varaiya, P., 1993). The coordination control of this framework is based on game theory and vehicles travel in tightly spaced groups in an attempt to increase the highway throughput. A common framework for communication between cars has been provided in the DOLPHIN project, which includes three layers: the vehicle control layer, the vehicle management layer, and the traffic control layer (Tsugawa, S.; et al., 2000). A substantial amount of related research has been conducted on the coordination of intelligent vehicles. Adaptive Cruise Control uses sensors to maintain safe inter-vehicle distances (Vahidi, A. & Eskandarian, A., 2003). Cooperative Adaptive Cruise Control (CACC) upgrades vehicles' ACC via a communication system (Girard, A. R.; et al., 2001). Automatic lane following is a fundamental maneuver for the lateral motion control of intelligent vehicles, which controls a vehicle to follow a predetermined path (Chee, W. & Tomizuka, M., 1995). Automatic lane changing enables an intelligent vehicle to overtake the preceding low speed vehicles or avoid the barrier ahead (Shiller, Z. & Sundar, S., 1998).
The Cybernetic Transportation System (CTS) is different from the Automated Highway System (AHS) in that the vehicles in AHS do not coordinate directly, while the intelligent vehicles of the Cybernetic Transportation System navigate autonomously and coordinate directly to improve the efficiency and safety of the transportation system. Moreover, the operation of the Cybernetic Transportation System is in a two-lane, two-way traffic situation, which is more complex than the highway. To solve the coordination of the intelligent vehicles with distributed characteristics, we propose an agent-based distributed coordinate approach. The intelligent vehicles are denoted by agents, which can perceive the status and intentions of the relative vehicle agents, generate intentions and take actions independently. The behaviors of vehicle agents are identified as a complete set of elementary maneuvers, and various coordination modes can be achieved by the integrating of these elementary maneuvers.
The remaining parts of this paper are organized as follows. In section 2, we present the intelligent vehicle model and control methods. Section 3 identifies the elementary maneuvers of the intelligent vehicles. In section 4, the distributed coordination approach of the intelligent vehicles of the Cybernetic Transportation System is given. Simulation tests and the results are presented in Section 5 and the conclusions are drawn in Section 6.
2. Vehicle model and control
The intelligent vehicles of the Cybernetic Transportation System are small electric automated vehicles. The onboard computers control the accelerating, braking, and steering of these vehicles. The longitudinal control and lateral control of these fully automated vehicles are performed by two motors independently.
2.1. Longitudinal control
The plant model used for the longitudinal controller design is

where v is the longitudinal velocity of the intelligent vehicle, τ is the time delay of the transmission and control system. The desired acceleration is u, which is the control input.
The linear quadratic optimal control is used in the longitudinal control of intelligent vehicle. The control input u is determined by minimizing the cost function

where Q and R are the positive weights of plant state and control input, respectively. The constraint of the control input is umin≤u≤umax. The state vector X in formula (2) is defined differently in different maneuvers.
If the ith vehicle wants to maintain a desired cruising speed vd, then the state vector in formula (2) is defined by

where vi is the longitudinal velocity of the ith vehicle. If the ith vehicle wants to follow the preceding one and maintain a steady inter-vehicle distance Ld (Refer to Fig. 1), then the state vector in formula (2) is defined by


The following maneuver of the ith intelligent vehicle
where, xi is the displacement of the ith vehicle, xi-1 and vi-1 are the displacement and longitudinal velocity of the preceding vehicle, respectively. Here the inter-vehicle distance is defined by adopting time following policy, namely, Ld=viT, where T is the constant time headway. The model of following can be written as:

where ω, is the acceleration of the preceding vehicle, which can be seen as the disturbance.
2.2. Lateral control
Refer to formula (6) and Fig. 2, the classical linearized bicycle model is used to model the lateral dynamics of the intelligent vehicle in the vehicle-fixed coordinate system (Guldner J. & Utkin, V. I., 1994).
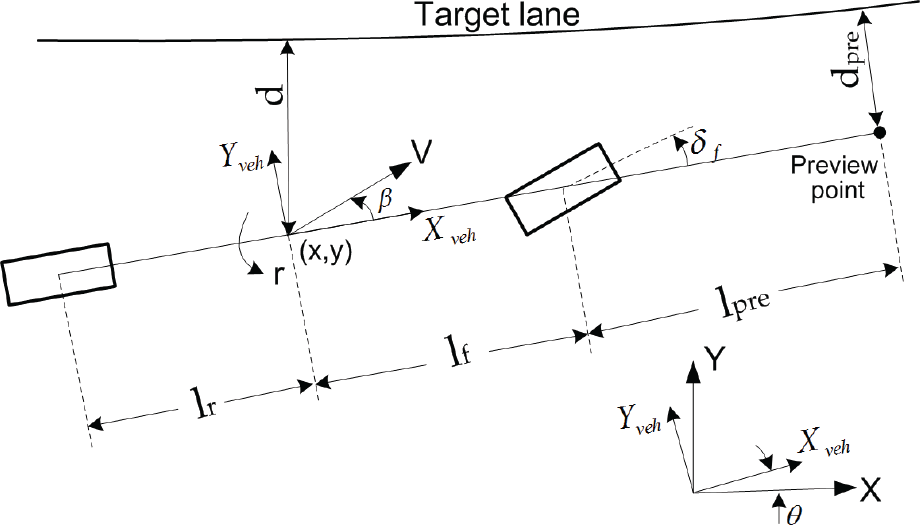
The lateral dynamic model of the intelligent vehicle
where m is the vehicle mass, I is the moment of inertia around the mass center, V is the velocity of the mass center in the vehicle-fixed coordinate system, β is the sideslip angle between vehicle centerline and velocity vector at mass center, r is the yaw rate, lf (lr) is the distance from the mass center to the front (rear) axle, cf(cr) is the stiffness coefficients of front (rear) wheels, δf is the steer angle of the front wheels, θ is the angle between the vehicle-fixed coordinate system and the inertial coordinate system.
Proportional feedback control is used in the lateral control of intelligent vehicle. The lateral control input is

where d is the lateral offset from the vehicle mass center to the target lane, dpre is the lateral offset from the preview point to the target lane, k1 and k2 are the gains of d and dpre, respectively. The constraint of the lateral control input is δfmin ≤ δf ≤ δfmax. The lateral control of lane changing and lane keeping maneuvers are virtually identical in that the lane changing maneuver is to keep the adjacent lane but the current lane. The target lane is the current lane in lane keeping, while the target lane is the adjacent lane in lane changing.
3. The elementary maneuvers of the intelligent vehicle
In different situations, the intelligent vehicles of the Cybernetic Transportation System interact in different ways. We assume the coordination of intelligent vehicles is performed on lanes without intersections. Intelligent vehicles cruise when the traffic flow is small and the distances between vehicles are large enough. In rush hours, when the number of intelligent vehicles increases, these vehicles will follow the preceding one and a platoon will form naturally. If the following vehicle has a higher speed than that of the preceding vehicle, it may overtake the preceding one if the adjacent lane can be occupied. All the above behaviors can be completed by the coordination of the elementary maneuvers of the intelligent vehicles. These elementary maneuvers are: Following, Cruising, and Lane changing.
To ensure the safety of coordination, we define three virtual safe cells around each intelligent vehicle, that is, the front safety cell, the back safety cell, and the overtaking cell (Ref Fig. 3). The lengths of the front safety cell, the back safety cell, and the overtaking cell are Lf, Lb, and Lover, respectively. The corresponding widths are Wf, Wb, and Wover, respectively. Both Lf and Lb are time headway of 1.3 seconds, which can ensure the string stability of a platoon (Yi, K. & Park, Y., 2002). Both Wf and Wb are the sum of six times as much as the standard deviation of the lateral deviation of intelligent vehicles and the vehicle width. The overtaking cell is within the communication range. Lover is long enough for the overtaking vehicle returning to its original lane in emergency situation. Wover is equivalent to the total width of the two lanes.

The virtual safe cells around the intelligent vehicle
3.1. Following
This maneuver enables an intelligent vehicle to maintain a desired inter-vehicle distance from the preceding one. In rush hours, vehicles with time headways smaller than 6 seconds are supposed to be following (Vogel, K., 2002), so the perquisite of this maneuver is that the longitudinal inter-vehicle distance is less than 6 seconds headway. The longitudinal control of this maneuver is to maintain a desired inter-vehicle distance and track the velocity of the preceding vehicle. The lateral control of this maneuver is current lane keeping.
3.2. Cruising
Such maneuver enables an intelligent vehicle steer along the current lane and move with a desired velocity. Cruising maneuver is used when the traffic flow is small. The prerequisite of this maneuver is that there is no vehicle in the range of 6 seconds headway. The longitudinal control of this maneuver is to maintain a desired cruising speed and the lateral control is current lane keeping.
3.3. Lane changing
This maneuver is used when an intelligent vehicle wants to change lane or to overtake a preceding low-speed vehicle. Lane changing maneuver includes two sub-maneuvers: Free lane changing and Emergent lane changing. Safe inter-vehicle must be ensured before the activation of lane changing and we determine the safe inter-vehicle distance by collision avoidance restrictions.
3.3.1. Free lane changing
An intelligent vehicle can activate a free lane change maneuver if there is no vehicle entering into the front safe cell and the back safe cell (Ref to Fig. 3). The longitudinal control of this maneuver is the same as that of the Cruising maneuver. The lateral control of this maneuver is to keep the adjacent lane.
3.3.2. Emergent lane changing
This maneuver can be activated when there is vehicle entering into the front safe cell of a lane changing vehicle. Such maneuver can ensure a safe inter-vehicle distance from the preceding one while lane changing. The longitudinal control of this maneuver is the same as that of the Following maneuver. If there is more than one vehicle entering into the front safe cell, the nearest vehicle will be the following target. The lateral control is the same as that of Free lane changing.
4. The coordination of intelligent vehicles
The coordination of intelligent vehicles of the Cybernetic Transportation System is in an agent-based distributed framework which models each intelligent vehicle as an agent. The vehicle agent is composed of three portions: the perception portion, the intention portion, and the action portion (Refer to Fig. 4). The function of the perception portion is to perceive the status and intentions of related vehicle agents. The intention portion assesses the situation and generates the feasible intentions. These intentions correspond to the elementary maneuvers, such as Following, Cruising, and Lane changing. The action portion activates the elementary maneuver corresponding to the intention.

The agent-based coordination architecture
In the coordination, the status and intentions of these agents are shared by using communications. Each vehicle agent considers the status and the intentions of related vehicle agents in the process of its independent intention generation. The vehicle agents generate their intentions according to their status.
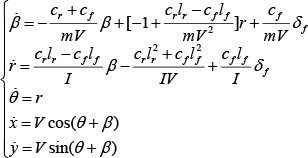
If the current status of a vehicle agent is following or cruising, the intention is generated according to the process shown in Fig. 5. If the headway is less than 6 seconds, the vehicle agent will consider the location, the velocity, and the intention of the preceding one. If a preceding low-speed vehicle has entered into the front safe cell of its follower and has no lane changing intention, this vehicle should be overtaken. In this condition, if there is no oncoming vehicle in the overtaking area, the following vehicle agent will generate the overtaking intention and activate lane changing maneuver.
The process of intention generation of a cruising or following intelligent vehicle
If the current status of a vehicle agent is overtaking, the intention is generated according to the process shown in Fig. 6. Firstly, the vehicle agent determines whether the perquisite of free lane changing can be satisfied. If there is no vehicle in both the front safe cell and the back safe cell, the intention of Free lane changing is generated. Otherwise, if there is oncoming vehicle entering into the overtaking cell, the vehicle agent has to generate an intention of Emergent lane changing and return to its original lane.

The process of intention generation of a lane changing or overtaking intelligent vehicle
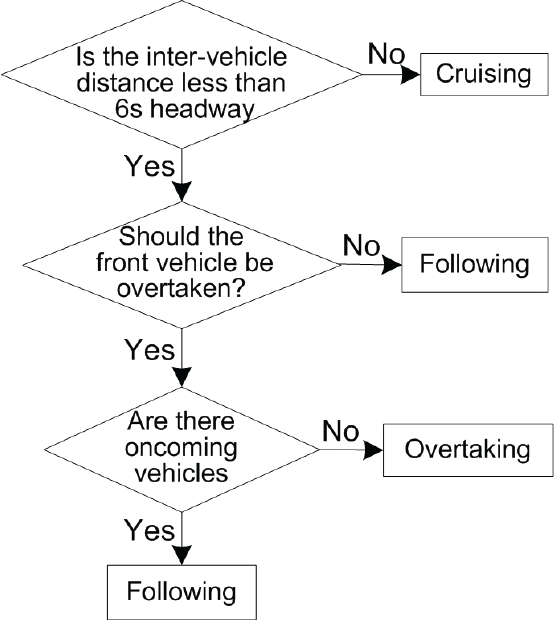
The convergence and robustness of this distributed coordination system are analyzed as follows. The discrete states of an intelligent vehicle can be denoted by a set Z={Z1, Z2}, where Z1 denotes the state when the vehicle is cruising or following the preceding one on its current lane, Z2 denotes the state when the vehicle is changing lane. The transition of these two discrete states can be modeled by a finite state machine (Fig. 7) and the triggers for transitions are

The finite state machine model for the discrete state transition
and

where Δy is the lateral deviation of the vehicle from the central line of the original lane, ε is the predefined threshold. The intelligent vehicle changes its maneuver according to its discrete state and the intention generation methods given in Fig. 5 and Fig. 6, therefore the convergence of this coordination system can be ensured. If the preceding vehicle is broken in operation, the following vehicles will overtake this broken vehicle if there is no oncoming vehicle in the adjacent lane, and they will decelerate and keep a safe distance from the preceding one if there is oncoming vehicle in the adjacent lane. The robustness of this coordination system can be guaranteed in this way.
5. Tests and results
The proposed coordination approach has been tested in two typical traffic scenes: the platoon scene and the overtaking scene. The simulation platform for the tests is TORCS. TORCS is a validated multi-vehicle simulation program integrating the complete vehicular dynamic models, the onboard sensor models, and the road models. In this platform, the status and intentions of the intelligent vehicles are shared via communications. The high speed vehicles cruise at a speed of 80 km/h and the normal speed vehicles cruise at a speed of 60 km/h. The high speed vehicles may generate the overtaking intentions when the preceding vehicle cruises at normal speed. The maximum acceleration and the maximum deceleration are 2.5m/s2 and −4.5m/s2, respectively. The two lanes for two-way traffic are parallel. One lane is the main lane with a large traffic flow and the other is the auxiliary lane with a relative small traffic flow.
5.1. Platoon scene test
This scene corresponds to the situation where both the inter-vehicle distances and the speed differences are small. By using platoon, the transport efficiency and safety can be improved in a large traffic flow situation. Seven intelligent vehicles with normal cruising speed are tested in this case. The initial headways between vehicles are less than 6 seconds and the platoon mode is activated when t=0. The inter-vehicle distances variation of intelligent vehicles are shown in Fig. 8 where dis(i,j) denotes the inter-vehicle distance between ith vehicle and jth vehicle. The velocity variation of these intelligent vehicles are given in Fig. 9. The video of this test is in multimedia extension 1.

The inter-vehicle distance variation of the platoon
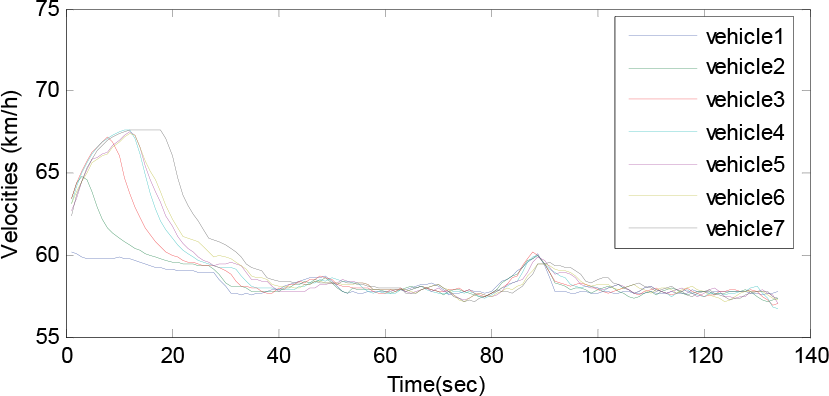
The velocity variation of the platoon
The results of Fig. 8 and Fig. 9 show that the proposed coordinate approach can realize the platoon mode. Initially, the inter-vehicle distances are large, and the speed of each following vehicle changes distinctly. After the forming of a platoon, the following vehicles can adjust their speeds when the leader's speed is disturbed, thus the string stability can be ensured.
5.2. Overtaking scene test
The overtaking scene presents when the differences between vehicle velocities are distinct. Overtaking can decrease the velocity loss of the high-speed vehicles and thus improve the efficiency of the transportation system. In this test, there is a platoon with normal speed in front of the high speed intelligent vehicle, thus this high speed intelligent vehicle activates the lane changing maneuver to overtake the platoon. In the process of overtaking, the overtaking vehicle detects the oncoming vehicle entering into the overtaking area, so it activates the emergent lane changing maneuver. With the coordination of the vehicles in the platoon, the overtaking vehicle merges into the platoon safely. The overtaking process is shown in Fig. 10.
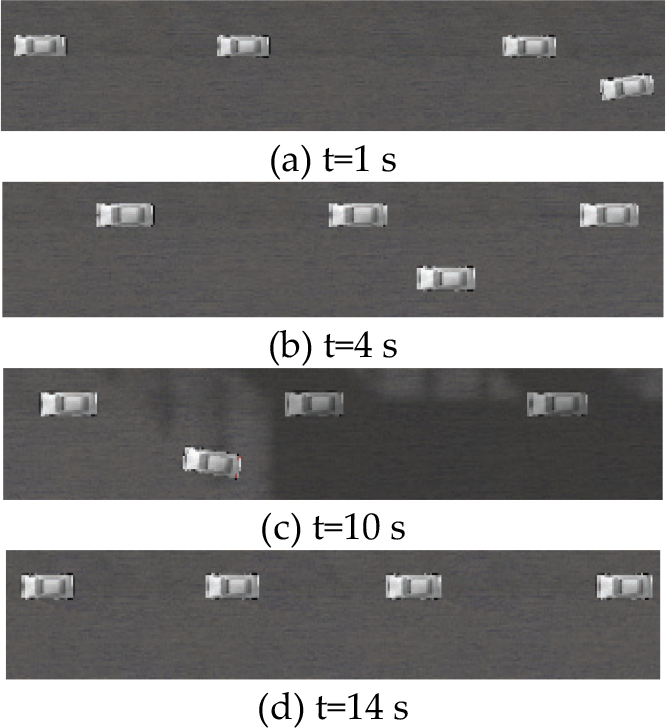
The process of overtaking
Fig. 10 (a) shows the overtaking vehicle activating the lane changing maneuver from the original lane. Fig. 10 (b) shows the overtaking vehicle running straight on the adjacent lane. Fig. 10 (c) shows the returning of the overtaking vehicle when it detects an oncoming vehicle. Fig. 10 (d) shows that a new platoon has formed after the returning lane changing. The results in Fig. 10 show that the proposed coordination approach can achieve an overtaking in a two-lane, two-way traffic situation and can ensure the safety of intelligent vehicles in an emergency situation. The video of this test is in multimedia extension 2.
6. Conclusions
The Cybernetic Transportation System is a promising transportation system for urban and/or suburban transportation, which can prevent accidents while improving efficiency. The coordination of the intelligent vehicles is critical for the operation of this transportation system. In this paper, we propose a distributed coordination approach for the intelligent vehicles of the Cybernetic Transportation System. The intelligent vehicles of this system are denoted by agents that can coordinate with each other. The states and intentions of these agents are shared via communications. Each vehicle agent generates intention and takes action independently. The action of a vehicle agent is decomposed into three elementary maneuvers corresponding to different intentions. Tests on the simulation platform show that the proposed coordination approach can ensure the effectiveness and safety of the coordination. Due to the complexity of the coordination of intelligent vehicles, there are still some open problems in this field, such as the coordination in an intersection or a roundabout, and these problems will be our future research objects.
This work has been supported by European FP6 Programme (EC-FP6-IST-028062) and Science and Technology Commission of Shanghai Municipality (062107035).
Index to multimedia extensions :
Extension 1. The platoon test scene in Section 5.1.
Extension 2. The overtaking test scene in Section 5.2.