
Abstract
For the assembly of multi micro objects in micromanipulation, the first task is to identify multi micro parts. We present an improved support vector machine algorithm, which employs invariant moments based edge extraction to obtain feature attribute and then presents a heuristic attribute reduction algorithm based on rough set's discernibility matrix to obtain attribute reduction, with using support vector machine to identify and classify the targets. The visual servoing is the second task. For avoiding the complicated calibration of intrinsic parameter of camera, We apply an improved broyden's method to estimate the image jacobian matrix online, which employs chebyshev polynomial to construct a cost function to approximate the optimization value, obtaining a fast convergence for online estimation. Last, a two DOF visual controller based fuzzy adaptive PD control law for micro-manipulation is presented. The experiments of micro-assembly of micro parts in microscopes confirm that the proposed methods are effective and feasible.
1. Introduction
Micro-robot has a wide range of applications in micro-electromechanical systems. In order to assemble multi micro objects under microscope, it is necessary that identifies firstly these objects. In pattern recognition field, Moment feature is one of the shape feature that be used in extensive application. Invariant moments are the statistical properties of image, meeting that the translation, reduction and rotation are invariance. Hu (Hu, 1962) has present firstly invariant moments to be use for regional shape recognition. For closed structure and not closed structure, because the moment feature can not calculate directly, it need construct firstly regional structure. Besides, because the moment involves in the calculation of all the pixels of intra-regional and border, it means that it can be more time-consuming. Therefore, we apply the edge extraction algorithm to process image firstly, and then calculate the edge image's invariant moments to obtain the feature attribute, which solves the problem discussion above.
After feature attribute extraction, the classification algorithm should be provided during the final target identification. The main classifier used at present can be divided into three categories: One is the method statistics-based and its representative is such as the bayes methods, KNN method, like centre vector and SVM (Emanuela B & et al, 2003), (Jose L R & et al, 2004), (Yi X C & James Z W, 2003), (Jing P & et al, 2003), (Andrew H S & Srinivas M, 2003), (Kaibo D & et al, 2002); One is the method rule-based and its representative is decision tree and rough sets; The last one is the method based on artificial neural network. Being SVM algorithm is a convex optimization problems, its local optimal solution must be global optimal solution, which is better than the others learning algorithms. Therefore, we employ SVM classification algorithm to classify the targets. However, the classic SVM algorithm is established on the basis of the quadratic planning. That is, it can not distinguish the attribute's importance from training sample set. In additional with, It is high time to solve for the large volume data classification and time series prediction, which must improve its real-time data processing and shorten the training time and reduce the occupied space of the training sample set.
For the problem discussion above, presents an improved support vector machine classification, which applies edge extraction's invariant moments to obtain object's feature attribute. In order to enhance operation effectiveness and improve classification performance, a feature attribute reduction algorithm based on rough set (Richard Jensen & Qiang Shen, 2007), (Yu chang rui & et al, 2006) has been developed, with the good result to distinguish training data set's importance.
Then, In order to meet the request of the high precise micro-manipulation task, robotic must employ the visual servoing method. The methods of visual servoing need calibrate precisely intrinsic parameter of camera. However, the system calibration is the complicated and difficult problem, especially for micro-manipulation based on microscope vision. So, we present the uncalibrated method to estimate image jacobian matrix online.
Many papers (Kang Q. S & et al, 2006), (Malik A. S. & Choi T. S, 2007), (Shen, Song D & et al, 2003) have been reported some researches about image jacobian matrix online estimation. Piepmeier (Piepmeier, 1999, 2004) presents a moving target tracking task based on the quasi-Newton optimization method. This approach is adaptive, but cannot guarantee the stability of the visual servoing. Malis's (Malis E, 2004) method can keep the parameter of vision servo controller constant, when intrinsic parameter of camera is changed. Su J. et al (Su J. & et al, 2004) presents a motion 3D object tracking method based on the uncalibrated global vision feedback. Unfortunately, the current estimation methods have problems such as estimation-lag, singularity, convergence and its speed. Especially in dynamic circumstances, these problems become more serious. To deal with those problems discussed above, we apply an broyden's method to estimate the image jacobian matrix. The method employs chebyshev polynomial to construct a cost function to approximate the optimization value, improving the converge of estimation.
To verify the effectiveness of the methods, using the estimated jacobian matrix, a PD visual controller is used to make features converge to desired values with satisfactory dynamic performance. The experiments of micro-assembly of micro parts in microscopes confirm that the proposed method is effective and feasible.
2. The multi objects identification
2.1. Invariant moments thorty
Image (p + q) order moments: we presume that f(i, j) represents the two-dimensional continuous function. Then, it's (p + q) order moments can be written as (1).

In terms of image computation, we use generally the sum formula of (p + q) order moments shown as (2).

Where p and q can choose all of the non-negative integer value, they create infinite sets of the moment. According to papulisi's theorem, the infinite sets can determine completely two-dimensional image f(i, j).
In order to ensure location invariance of the shape feature, we must compute the image (p + q) order center moment. That is, calculates the invariant moments using the center of object as the origin of the image. The center of object (i‘, j’) can obtain from zero-order moment and first-order moment. The centre-moment formula can be shown as (3).

At present, most studies about the two-dimensional invariant moments focus on extracting the moment from the full image. This should increase the computation amount and can impact on the real-time of system. Therefore, we propose the invariant moments method based on edge extraction, which gets firstly the edge image and then achieve the invariant moments feature attribute. Obviously, it keeps the region feature of moment using the propose method. In addition, being the role of edge detection, the data that participate calculation have made a sharp decline, reducing greatly the computation amount.
The invariant moments is the function of the seven moments, meeting the invariance of the translation, rotation and scale. The calculation formula is shown in (4).

We uses both of the seven moments function for computing the micro-object feature. The fivth section will give the experiments in detail.
2.2. Improved support vector machine and target identify
1) Support Vector Machine: The basic idea of SVM is that applies a nonlinear mapping Φ to map the data of input space into a higher dimensional feature space, and then does the linear classification in this high-dimensional space.
Presumes that the sample set (x i , y i ), (i = 1, …,n), x ∈ R d can be separated linearly, where x is d dimensional feature vector and y ∈ {-1,1} is the class label. The general form of judgement function in its linear space is f(x) = w•x + b. Then, the classification hyperplane equation can be shown as (5).

If class m and n can be separated linearly in the set, there exists (w, b) to meet formula as (6).
Where w is weight vector and b is the classification threshold. According to (5), if w and b are zoom in or out at the same time, the classification hyperplane in (5) will keep invariant. We presume that the all sample data meet |f(x) ≥ 1, and the samples that is closest classification hyperplane meet |f(x) = 1, then, this classification gap is equivalent to 2/||w||. So the classification gap is biggest when ||w|| is minimum.
Although the support vector machine with a better classification performance, but it can only classify two types of samples, and the practical applications often require multiple categories of classification. As a result, SVM need to be extended to more categories of classification issues. For the identification of a number of small parts in micromanipulation, we applied the Taiwan scholar Liu presented method based on the “one-to-many” method of fuzzy support vector machine for multi-target classification.
2) Improved Support Vector Machine: For the completion of the sample training, it is a usually method that all the feature attribute values after normalization have been used for modeling, which will increase inevitably the computation amount and may lead to misjudge the classification system being some unnecessary feature attributes. Therefore, bringing a judgement method to distinguish the attribute importance may be necessary for us. So we employ rough set theory to complete the judgement for samples attribute's importance. Then, we carry out SVM forecast classification based the reduction attributes.
Now, we introduce rough set theory. The decision-making system is S = (U,A,V,f), where U is the domain with a non-null limited set and A = C∪D. C, D represents conditions and decision-making attributes set respectively. V is the range set of attributes

If there is B(X)̅ -

Where card(X) is the base number of the set X.
The attributes reduction of rough set is that the redundant attributes have been deleted but there is not loss information. The formula R = {R R ⊑ C, γ(R, D) = γ(C,D)} is the reduction attributes set. Therefore, we can use equation attributes dependence as conditions for terminating iterative computing.
In order to complete the attribute reduction, we present a heuristic attribute reduction algorithm based-on rough set's discernibility matrix, which applies the frequency that attributes occurs in matrix as the heuristic rules and then obtains the minimum attributes's relative reduction. The discernibility matrix was introduced by Skowron and has been defined as (7):

According to formula (7), The value of elements is the different attributes combination when the attributes for the decision-making are different and the attributes for the conditions are different. The value of elements is null when the attributes for the decision-making are same. The value of elements is −1 when the attributes for the decision-making are same and the attributes for the conditions are different.
If p (a) is the attribute importance formula of attribute a, we can propose the formula as (8) according to the frequency that attribute occurs:
Where γ is the general parameter and c ij are the elements of the discernibility matrix. Obviously, the greater the frequency that attribute occurs, the greater its importance. Therefore, we can compute the importance of attributes and eliminate the attributes that it's importance is the smallest using the heuristic rules in formula (8). And then, we can obtain the relative reduction attributes. Now, we give the heuristics attribute reduction algorithm based-on rough set's discernibility matrix.
Input: the decision-making table (U, A ∪ D,V,f)
Output: the relative attribute reduction
Algorithm steps:
computes the identification discernibility matrix M.
determines the core attributes and find the attributes combination that the core attributes is not included.
obtains conjunctive normal form P = ˄(˅c ij :(i = 1, 2, 3…s; j = 1,2,3…m)) of the attributes combination by step (2), where c ij are elements of each attribute combination. And then converts the conjunctive normal form to disjunctive normal form.
determines the importance of attribute according to formula (8).
computes the smallest importance of attributes by steps (4) and then eliminate the less importance attribute to obtain the attributes reduction.
After the attribute has been reduced, the samples feature attributes will send to SVM for establishing model. Support vector machines using Gaussian kernel function, and Gaussian kernel function showed a good performance in practical applications of learning. Finally, we can finish the classification of the final prediction data.
3. Online estiamtion image Jacobian martrix
3.1. Image Jacobian
The image jacobian matrix Jq is defined as

Where
q = [q1, q2…qm]R represents the coordinates of robot end-effector in the task space. f = [f1, f2…fn]T is corresponding position in image feature.
3.2. Image Jacobian matrix estimation based on broyden method
The image jacobian matrix can be calculated by calibrating the inner and outer parameter of robotic system & sensor system. However, it is impossible to obtain precise system parameter under a dynamic or uncertainty environment. Considering those, we employ broyden's method to estimate the image jacobian matrix. The broyden method that solves the nonlinear equation can be shown in (11):

Now, we apply the broyden method to construct estimation model of image jacobian matrix. According to equation (1), if the feature error of two images represents as

Where f d is the feature of the expectation image and f c is the feature of the current image, The taylor series expansion of e f is shown as

Where R n (x) is Lagrange remaining. We define *Jq(qn) as the Nth image jacobian to be estimated,

Ignoring the high order term and Lagrange remaining R n (x), Equation (15) can be obtained from (13) and (14), which is shown as

So, if J's counterpoint is A, Δe‘s counterpoint is y and Δq's counterpoint is s, we can construct the image jacobian estimation model based broyden. The image jacobian estimation model based on broyden method is shown as (16).

The broyden algorithm estimates the optimization value by employing iterative computation. Therefore, it need the end condition of iterative computation, we employ chebyshev polynomial to construct the cost function to approximate the optimization value.
3.3. The cost function based on chebyshev polynomail
Provided that

If N k (q) ∈ c[-1,1], for chebyshev polynomial serial {T n , n = 0,1, …} with weight ρ(x) = (1-x2)−1/2, it's optimization square approximation polynomial can be shown as
where

Then

Usually, N k (q) ∈ c[a, b] we must convert c[a, b] into c[-1, 1], The equation (21) can finish the convert.

if we use part sum s n * as N(q)'s approximation, under some conditions, there is a fast speed for a n –> 0.
3.4. Comparison chebyshev polynomial approximation
Piepmeier (Piepmeier, 1999, 2004) provides RLS algorithm to approximate best value for minimum cost function. The cost function using RLS is shown as (22).

where Λ is a rate of dependency for prior data. As shown in equation (14), in order to obtain some performance, the cost function using RLS algorithm depends on the data of the several past steps, it mean that the prior knowledge must be obtained for finishing the task. Similarly, the cost function using chebyshev polynomial is shown as (23).

Clearly, the cost function using chebyshev polynomial is independent of the prior data.
3.5. Jacobian estimator with improved broyden method
A broyden with chebyshev polynomial approximate algorithm estimator of image jacobian is developed. A graphical representation of the estimate process is shown in Fig.1. Firstly, The broyden estimator starts with initial endeffector position q0 and precision ε. Then, Camera captures an image of endeffector for extracting corresponding image coordinate feature f k , which provides the possibility for calculating *J(qk) by formula *J(qk)=[f'(qk)]−1. Secondly, Camera captures an image of target to obtain expectative image coordinate feature fk+1. With the obtained *J(qk), the servoing control law can be deduced detail in section of the vision controller design. Finally, Program judges whether precision ε satisfies system requirement or not. If precision ε arrives the requirement, system will be ended, otherwise system will be executed repeat processing.
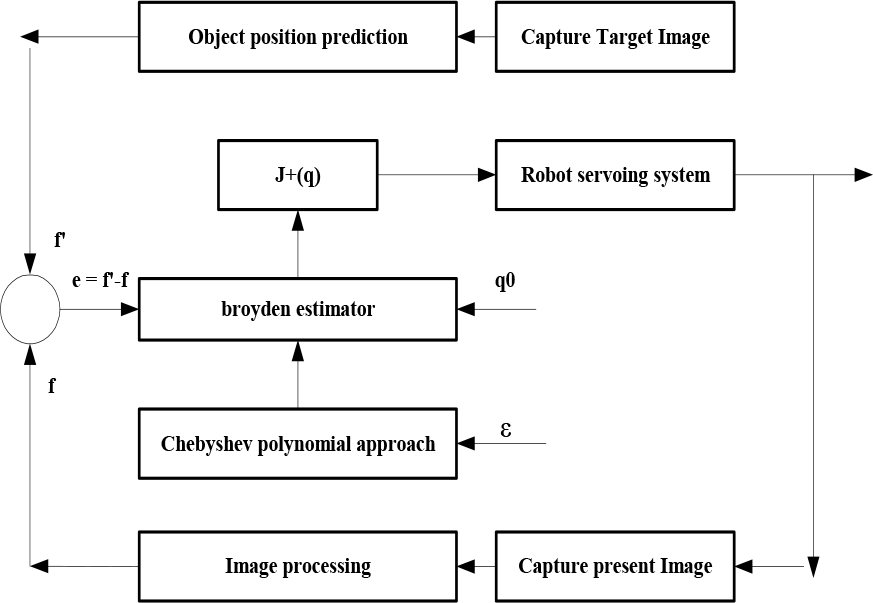
A broyden with chebyshev polynomial approximation estimator of image jacobian
4. The vision controller design
In order to finish three-dimensional small object positioning task, in the actual operation, micromanipulation tasks will be divided into horizontal direction (XY plane) movement and the vertical direction (Z axis) movement. The manipulator in the XY plane moves first, positioning small parts in the above, then does so in the Z-axis vertical movement, positioning small parts at the centre. Therefore, we apply two image jacobian matrixs, including horizontial view field of image jacobian matrix and vertical view field of image jacobian matrix, which can complete the positioning and tracking three-dimensional objects.
The change of robot movement [dx, dy] T and the change of image characteristics [du, dv] T can be wirte as (24):

According to the online estimtion image jacobian matrix J based on broyden method, sets the position of the error e = f d - f c , which f d is the expectations of position of objects (small cylindrical parts, 600 um diameter) and f c is the centre of endeffector. Then, the control law of PD controller u (k) is:

Where T s is the time interval, K p is proportional gain and K d is differential gain.
Since the microscope visual field is finite and controller is to avoid integral saturation, we design a two DOF visual controller based fuzzy adaptive PD control law for micromanipulation.
The fuzzy adaptive PD controller applies error e and error change ec as its input. Then, we build a fuzzy rule table based practice experiences, which gives the counterpart relationship between Kp, Kd and error e, error change ec. So, we can revise online control system parameters. (26) shows the revised computation formula.
5. Experiments
Micromanipulation robotic system includes 3D micro-move platform, micro-gripper driven by piezoelectricity, micro-adsorption hand driven by vacuum, microscope vision and so on. Micro-vision platform uses a two-way orthogonal optical vision, which includes the horizonal microscopes vision and the vertical microscopes vision.
5.1. Feature extraction and data pretreat
The main task of classification is to identify and classify the manipulator (microgripper, vacuum suction) and operation targets (cylindrical metal part, glass ball), which can provide convenience for follow-up visual servo task. Fig.3 shows the original image of operation targets and manipulator in microscopic environment. Fig.4 is the image after edge extraction of operation targets and manipulator in microscopic environment.

The system construction of three hands cooperation micromanipulation stage
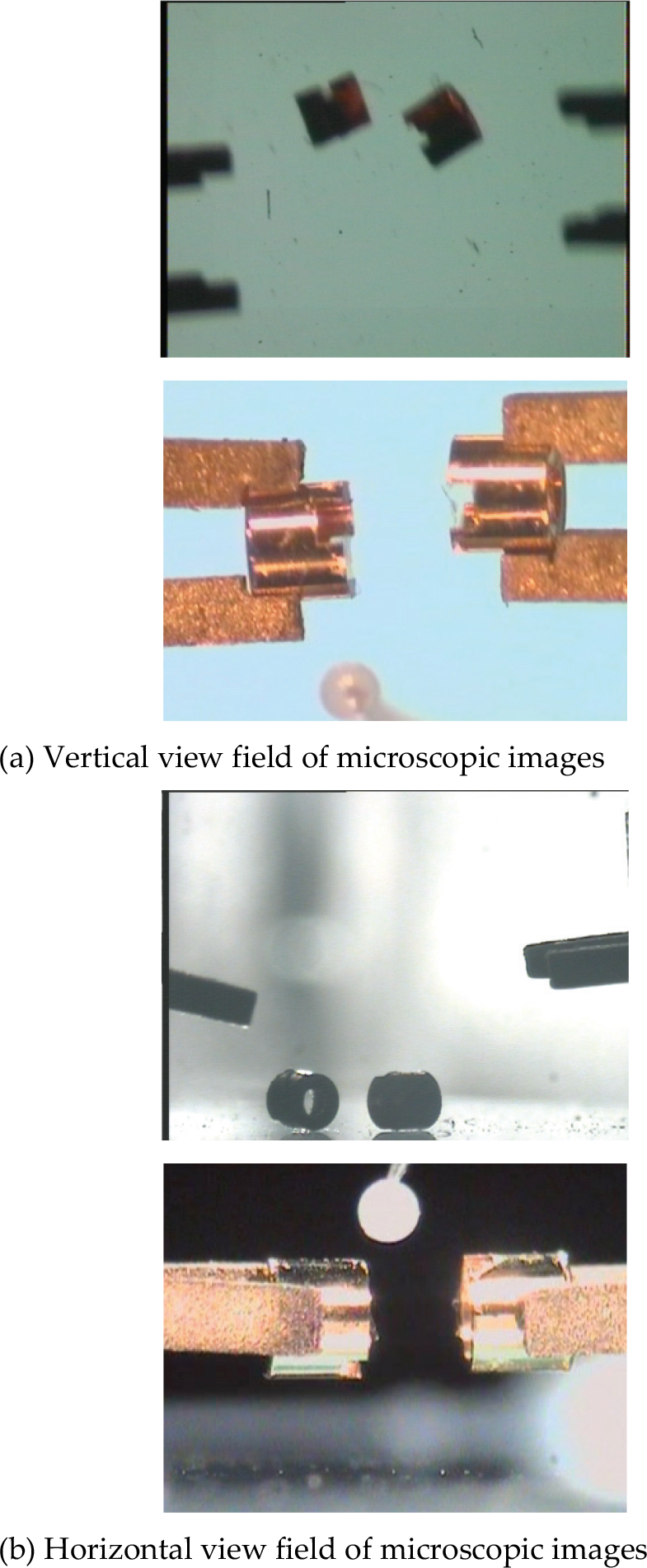
The original microscopic image of object and the endeffector in vertical (a) and horizontal (b) view fields

The object centre image and the end centre of the endeffector after processing in vertical (a) and horizontal (b) view fields
Table 1 gives the feature attribute's normalization value of four different objectives using invariant moments algorithm. We compute the feature attribute of objects in all directions and only list one of the feature attribute.
The feature attribute's normalization value of different objects using invariant moments algorithm

5.2. Result of identification and analysis
We compare firstly the data classification effectiveness on a number of micro objects using the traditional support vector machines algorithm and rough set + SVM, and the results are shown in table 2.
The comparison results of using two classification methods

According to table 2, the correction rate of classification based on the proposed SVM classification algorithm has been over 95 pre cent, being higher than the single SVM algorithm's correction rate. So, we can draw the conclusion that the attribute reduction improves the classification ability. Besides, compared with the single SVM algorithm's calculation time, It can be seen clearly from Table 2 that the calculation time of the proposed algorithm is less than about five times, meaning that the system becomes more effective.
Then, Table 3 provides the comparison results of classification accuracy using SVM classification and SVM+rough set classification with joining the other 25 feature attributes (gray, area, perimeter, texture, etc.). In table 3, The first column is times of data sets; second column is the number of conditions attributes after attribute reduction; third column is classification accuracy using the SVM; fourth column is classification accuracy using SVM and rough set algorithm. The number of conditions attributes of the final classification for entering to SVM is 14.25, less than 25 features attribute. Thus it simplifies the follow-up SVM forecast classification process.
The comparison results of classification accurateness using SVM and SVM+Rough set classification

5.3. Automatic position test
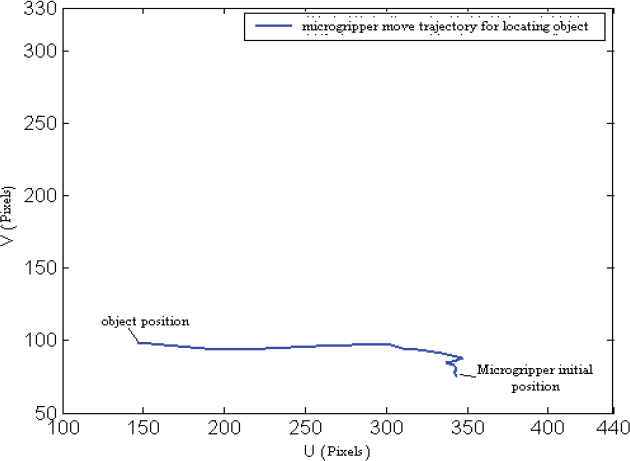
To accomplish micromanipulator positioning and girpping small parts, we must first obtain the centre of object and the centre of the end of endeffector. The centre of object and the end of endeffector can be accessed by a series of image processing (gray, de-noising and filter, canny operator, edge extraction, fuzzy c-means clustering). In Fig.5, the XY image plane coordinates of the center of the object is (147,99) and the centre of the end of the endeffector is (343,77).

The trajectories of micromanipulator approaching goal objects with only proportional control (XY plane)
Assuming that the initial parameters of PD controller Kp is 10 and Kd is 0, that is, only joined proportional control, control effect is shown in Fig. 5. We can see the implementation of automatic positioning objects to the target center, a greater oscillation and overshoot. When Kp is 10 and Kd is 1.5, which incorporates proportional and differential control, control result is shown in Fig.6. Differential joined inhibits apparently the system overshoot, and the system meets the rapid and smooth. Finally, the implementation of micro-manipulator positioning and automatic gripping operations is given, It can be obtained the satisfied implementation with the results to the system application requirements. Fig.7 is the image of the endeffector automatically locating object.
The trajectories of micromanipulator approaching goal objects with proportional and differential control (XY plane)

The image of endeffector automatically locating and gripping object in vertical (a) and horizontal (b) view fields
6. Conclusion
For the completion of three-dimensional micro-sized components assembly, an improved support vector machine algorithm is present, which be employed to identify multi micro objects. Then, We apply an improved broyden's method to estimate the image jacobian matrix on line, which employs chebyshev polynomial to construct a cost function to approximate the optimization value. Finally, design a PD controller to control micro-robot. In the microscopic visual environment, completes the visual servo task of micromanipulator positioning and automatic gripping small parts, the experimental results show that the algorithm is relatively satisfied with the effectiveness of implementation. The method that we presented not only ensures the existence of a local minimizer but also allows the convergence of the updated solution to the minimum. Howerver, it can get stuck on a saddle-point, in Newton's method, a saddle-point can be detected during modifications of the Hessian.
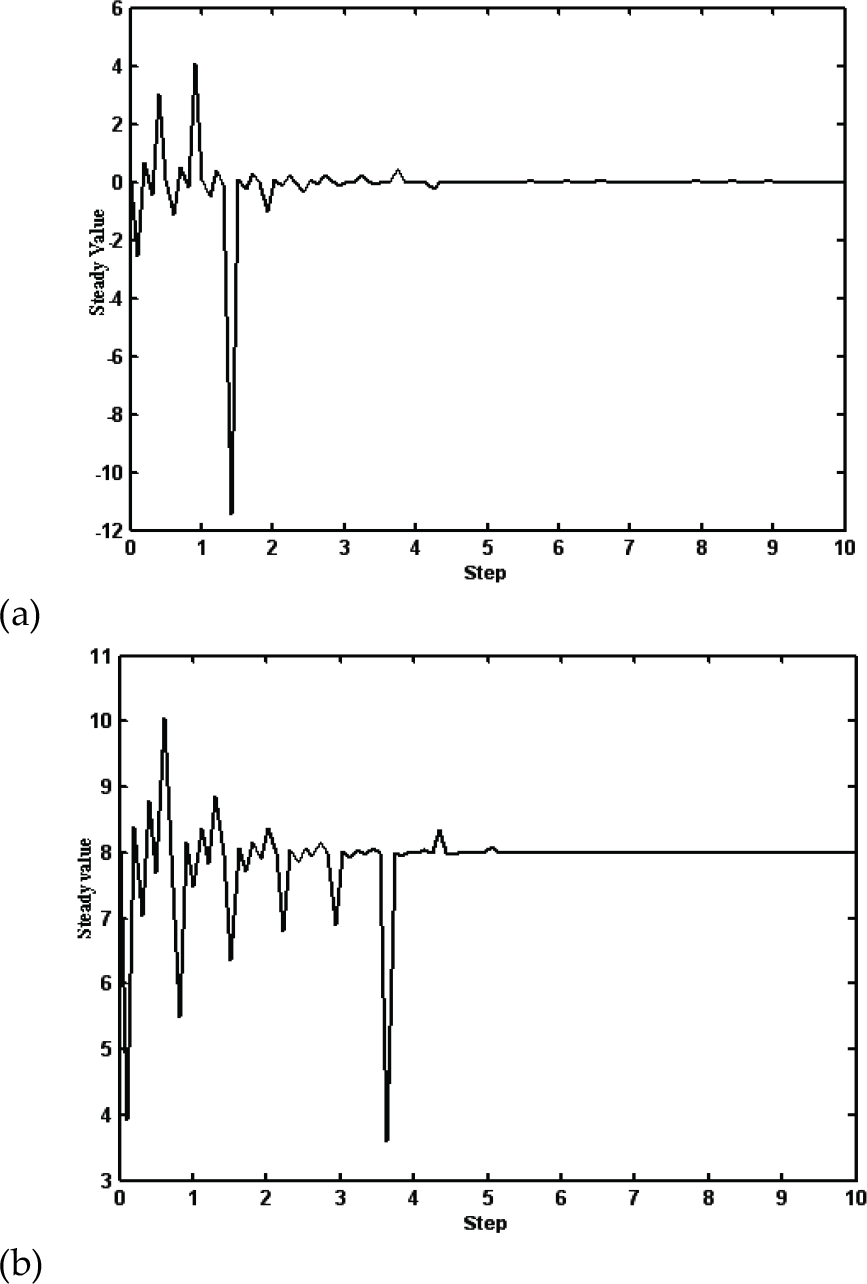
Convergence speed of chebyshev algorithm (a) and Convergence speed of RLS (b)