
Abstract
This paper is concerned with compliant haptic contact and deformation of soft objects. A human soft fingertip model is considered to act as the haptic interface and is brought into contact with and deforms a discrete surface. A nonlinear constitutive law is developed in predicting normal forces and, for the haptic display of surface texture, motions along the surface are also resisted at various rates by accounting for dynamic Lund-Grenoble (LuGre) frictional forces. For the soft fingertip to apply forces over an area larger than a point, normal and frictional forces are distributed around the soft fingertip contact location on the deforming surface. The distribution is realized based on a kernel smoothing function and by a nonlinear spring-damper net around the contact point. Experiments conducted demonstrate the accuracy and effectiveness of our approach in real-time haptic rendering of a kidney surface. The resistive (interaction) forces are applied at the user fingertip bone edge. A 3-DoF parallel robotic manipulator equipped with a constraint based controller is used for the implementation. By rendering forces both in lateral and normal directions, the designed haptic interface system allows the user to realistically feel both the geometrical and mechanical (nonlinear) properties of the deforming kidney.
1. Introduction
Researchers have long been interested in the fundamental dynamic properties of contact interaction with deformable objects. In retrospect, there has long been a growing and continuous demand for accurate deformation estimation between non-rigid objects. Although discretization such as finite and boundary element methods are among the most accurate numerical algorithms for simulating contact interactions and deformation, their implementation comes with a high computation cost and requires adopting specific mitigation measures. Among these measures are condensation [1], equivalent mesh use [2] and pre-computation [3, 4]. In spite of these faster finite element techniques predicting, in most cases, nearly the same deformations as those obtained by conventional linear finite element analysis [1], they are in general not feasible for real-time interactive haptic rendering, especially when complex geometric objects made of a variety of materials are considered. Within this perspective [5–7], the mass-spring-damper (MSD) physical modelling scheme has probably been the most appropriate alternative, especially at update rate requirements of over 1 kHz [8].
In haptic rendering of deformable objects, constraint- and penalty-based methods have long been the interest of many researchers. Although much has been accomplished over the last couple of decades in terms of the direct force and/or tactile feedback controllers [9, 10], realistic and fast haptic rendering of deformable objects has not yet been a success. The main obstacle to this endeavour is the difficulty in designing a unique and complete constitutive (load-deflection) model for nonlinear dynamic contact and deformations. Researchers have therefore been interested in developing finite deformation models of various materials exhibiting nonlinear constitutive responses [11–14]. Due mainly to the complexity of characterizing the material properties under various loading conditions, proper modelling is a challenging task. For MSD systems, force distribution methods have been successfully used to achieve more realistic tissue simulations [15, 16]. However, research towards a complete accurate haptic contact and deformation system is still in development.
Realizing that most tissue interaction research makes use of simple objects and kinaesthetic feedback (force feedback via a haptic interface device), this study aims for haptic interaction modelling between a soft fingertip and a complex shaped nonlinearly viscoelastic object. This choice allows us to address the common need for developing a computationally effective, accurate, non-linear and deformable viscoelastic model [17]. To this aim, the soft fingertip is considered to be virtually attached to the end effector of a haptic device and manipulated by the user to explore the mesh model of a kidney. To achieve a realistic response [18, 19], a compliant nonlinear modelling approach is employed in the normal direction by facilitating nonlinear stiffness and damping elements exhibiting rate-dependent behaviours. In the tangential directions, a simplified form of the LuGre (Lund-Grenoble) dynamic friction model [20, 21] is incorporated to predict the tangential reaction force [22] and thus resist the motion at various rates to feel surface texture. Noting that local deformation of the kidney tissue is a function of both the normal and frictional forces, contact forces are distributed to nodes neighbouring the contact point by utilizing a proper kernel weighting function. The weighing function provides a continuous symmetric force distribution within a certain radius of influence from the contact point. The nodes falling inside the influence zone are then assigned nonlinear spring-damper elements and the forces distributed are used in determining the corresponding nodal displacements (thereby the deformed shape of the kidney tissue).
A constraint-based controller is designed for implementation of our approach for the user to haptically explore a compliant surface and feel the effects of curvature variations and friction. The controller is derived from a closest-point algorithm and allows for free motion of the soft fingertip in space before the contact and provides stable interaction with deformable surfaces without any need for force and acceleration data. The accuracy and consistency of the presented framework are proven by both the theoretical and experimental analysis. Experimental results on real-time interaction data show realistic and numerically effective interactions.
2. Haptic Display System
2.1. Surface model
Let us consider (n+1) and (m+1) data points in parametric directions

Here,
2.2. Closest point
With

represents the vector from the end-effector to the nearest location on the surface. An illustration of this set up is given in Figure 1 where a local reference frame is also described by unit vectors
The nearest location from

which is solved for the local coordinates

Schematic representation of the haptic device, fingertip position and the surface

where
2.3. Contact force model
Continuous contact dynamic models, also referred to as compliant contact models, account explicitly for the deformations of the contacting bodies. In such models, contact force in the normal direction is an explicit function of the local indentation e and its rate of change

Most common form of this equation is the linear spring-damper model:

where
Hertzian contact law [25] is based on a nonlinear spring along the line of contact and usually serves as a good starting point in developing realistic contact force models. One such contact model is proposed in [26] for estimating the fingertip normal forces. Normal forces registered by the user pressing steadily against a flat (transparent acrylic) plate are shown to compare well with the forces predicted by the Hertzian formulation. Although this study [26] shows the Hertzian model applies well to static, or quasi-static, elastic cases, it cannot be used for compliant dynamic interactions where the fingertip tissue interacts with deformable objects. This implies that for nonlinear viscoelastic and rate-dependant interactions between the fingertip and a deformable surface, the Hertzian contact model does not result in a near fit to the actual force-indentation curves [27]. To overcome the problems of the linear spring-damper model (6) and gain the advantages of the Hertz model, alternatives may be considered. In the model proposed by Hunt and Crossley [28], energy dissipation (hysteretic damping) is accounted for in addition to nonlinear local indentation:

Here, e,

are used to define the nonlinear contact stiffness and damping coefficients. The constants
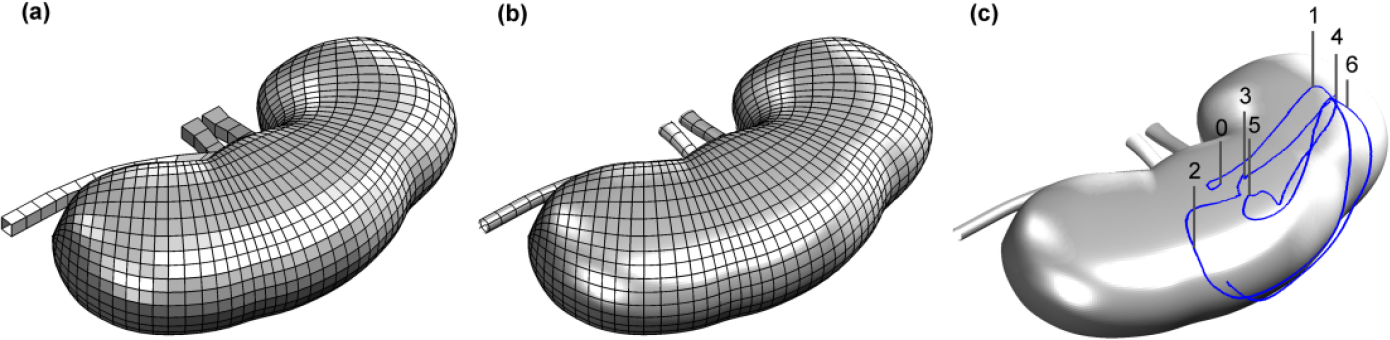
It is clear that almost none of the materials and soft tissues in particular have the same mechanical behaviour. Therefore, realistic force-indentation formulations require insightful conceptual understanding of the interaction dynamics between the soft fingertip and the contacting surface. Because the contact force (6) exerted at the soft fingertip (distal phalanx) is dependent on the mechanical and geometrical features of the deforming object, realistic haptic surface exploration calls for a proper conceptual articulation and is not possible without prior modelling of the deforming object's characteristics. Figure 2 (b) shows the measured and calculated force-indentation data when a rigid probe is pushed against a kidney tissue surface [30]. The stiffness functional that achieves a near match to experimental data [30] is given by:

where
Noting that energy dissipation is an essential property of biological tissues, a stiffness only model is not preferred. Therefore, a nonlinear viscous damping coefficient

Here, f n is the normal (contact) force determined by equation (6).

Normal forces; (a) soft fingertip pressed against a rigid surface; (b) kidney indentation by a rigid spherical object
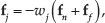
In Figure 3 (a), a schematic description of the resulting 3D constitutive model is seen. It shows the soft fingertip moving towards the kidney surface, where

Then, taking the time derivative of equation (11) and using Remarks 2.1 and 2.2 yield [24]:

where:

The normal force

where f
n
is computed by equation (6) using

Constitutive model
2.4. Dynamic friction model
Because the classical stick-slip (static Coulomb friction) model is unrealistic [22] and friction is a highly complex nonlinear phenomenon, there is a huge number of dynamic friction models in literature [20–22, 32–34]. From them, we have decided to use the LuGre model [20, 21, 34] as it is simple to implement and accounts not only for the break-away force and the viscous friction, but also for the Stribeck effect. To reduce complexity and guarantee continuity of the model, the variations in the sliding velocity

where

is used, where the design parameters

where
Using Equations (15) and (17), the friction force is governed by:

where

2.5. Deformation distribution
Because a point force is idealized and a finite contact area always exists between the contacting bodies, an influence zone of the fingertip contact on the deforming kidney surface is assumed and used for distribution of the contact forces. As shown in Figure 4 (a) the influence zone is described with the distance
Referring to Figure 4 (b), the force distributed at the jth control point is defined by:
where

where

where, with T as the sampling time,

Force distribution; (a) influence zone, (b) control point constitutive model
2.6. Haptic device controller
A 3-DoF parallel manipulator (Novint Falcon 3D touch device [36]) is used for testing the presented approach. The dynamics of the manipulator are given by:

where

2.6.1. Free-space motion
A simple proportional-derivative (PD) controller [38] is used during free-space motion. While

where
Proof:
To prove the stability of this equation,

which is locally negative semi-definite as long as
2.6.2. Contact motion
As the soft fingertip touches the virtual surface, a constraint based controller similar to that used in [24] takes over:

Here, ε is a small positive real number,
Proof:
Let us consider the following Lyapunov function candidate function:

Noting that

since

Because equation (19) indicates that

This result and the fact that

Finally, Equations (14) and (18) together with (19) are substituted into this equation and
3. Experimental Results
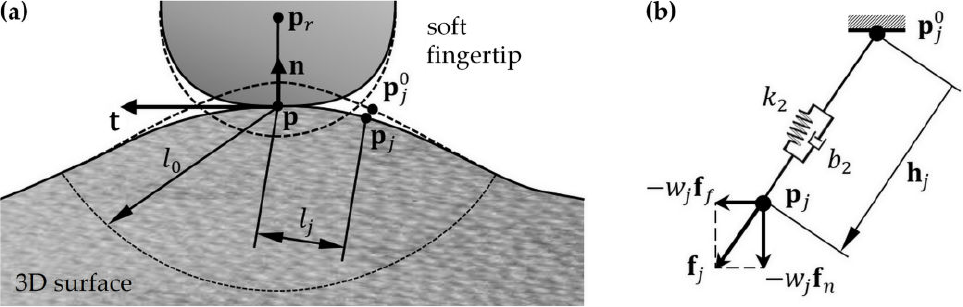
Figure 5 (a) shows a kidney surface mesh model used in implementing our approach. This choice is partly due to the fact that kidney tissue behaves in a viscoelastic manner and is thus a proper choice for the proposed algorithm. The model used is described by equation (1) and consists of non-uniform rational basis spline (NURBS) [23] patches of degree 3 (created by 3D raw data approximation). Using the model in Figure 5 (a), a singularity-free smooth kidney surface mesh [39] is then generated via Lagrange interpolation, as seen in Figure 5 (b). Figure 5 (c) shows the motion trajectory of the fingertip bone edge (haptic device gripper) at various instances of time.
Kidney surface mesh and the soft fingertip motion trajectory; (a) surface mesh model; (b) Lagrange interpolated surface mesh; (c) motion trajectory
A Novint Falcon robotic manipulator is chosen as the experimental test-bed (depicted in Figure 6). This particular low-cost commercial force-feedback device is a 3DoF parallel mechanism with a gripper at the end effector. It has around 1 kHz update rate, 60 µm position resolution and 9 N continuous force display capability. Due to its limited resolutions, the device is not ideal for display and haptic perception of small forces. In running this device, a component-based open-source haptic API (Haptik Library [40]) under MATLAB software is used on a Windows 8 run computer (Intel 3.2 GHz Core i5 CPU, 4 GB Ram). A MATLAB script reads the Novint Falcon encoder signals and calculates the controller output signals. These signals are subsequently sent to the device to provide force feedback to the user. Noting that the haptic touch perception threshold is in the range of 10–400 Hz and human fingers cannot discriminate two consecutive force input signals beyond 320 Hz [41, 42], an update rate of 1 kHz [8] or at least twice the perception bandwidth is required (by the Nyquist-Shannon sampling theorem). Experimental data collected in this study show that the update rates registered are in 878–1265 Hz range and the mean is at 1025 Hz.

Experimental-set up
In minimizing the adverse effects of low velocity resolutions, an eight-point moving average filter is used for high frequency noise reduction and signal smoothing. This decision is based on our empirical trials and the fact that moving average filters [43] are simple to implement and computationally inexpensive. Experimental data show that the cut-off (3 dB attenuation) frequency of this low-pass filter remain in the 110–160 Hz range, well above the 5–10 Hz force exertion and the 20–30 Hz kinaesthetic sensing bandwidths of hands and fingers [41].
Experiments are carried out after careful assignment of system constants. By noting that tissue thickness from the fingertip bone edge to the initial contact point is between 3 and 5 mm [44],
The motion starts in free space and the user pushes the device gripper (soft fingertip) to initiate contact with the kidney surface. Although real-time discontinuous switching from the PD controller to the constraint based controller have the potential to cause undesirable effects, no plausible contact chattering was observed in our implementations. With the PD gains set at
In Figure 7 (a), time-varying deformations

Deflections; (a) s1 for the soft fingertip and s2 for the kidney tissue; (b) (s1-s2)
Figure 8 illustrates the kidney tissue deformation distribution at various instances of time. The colour bar to the right indicates the colour legend for deformation values between the maximum (red) 10 mm and minimum (blue) zero. Deformations observed experimentally around the contact point are the result of the nonlinear constitutive relations with an influence zone-based distribution of the normal and the frictional contact forces. The deforming tissue, as a result, looks and feels realistic.

Kidney tissue surface deformations at various instants
The general nature of the normal force data is nicely illustrated in Figure 9 (a) for the indenter (soft fingertip) and in Figure 9 (b) for the indented material (kidney tissue surface). Note in this figure that experimental data shows a reasonably favourable agreement with the constitutive model predictions (see Figure 2). For small indentations, Figure 9 (a) shows that the user feels the effects of a contact force discrimination threshold. Whereas at increasing indentations, the experimental data agree better quantitatively with the constitutive model. The loading-unloading cycle (hysteresis) in Figure 9 (b) is a clear indication of the behaviour of typical viscoelastic materials. The fingertip tissue model is shown to exhibit substantial hysteretic losses under local cyclic loading and become stiffer with increasing displacement.
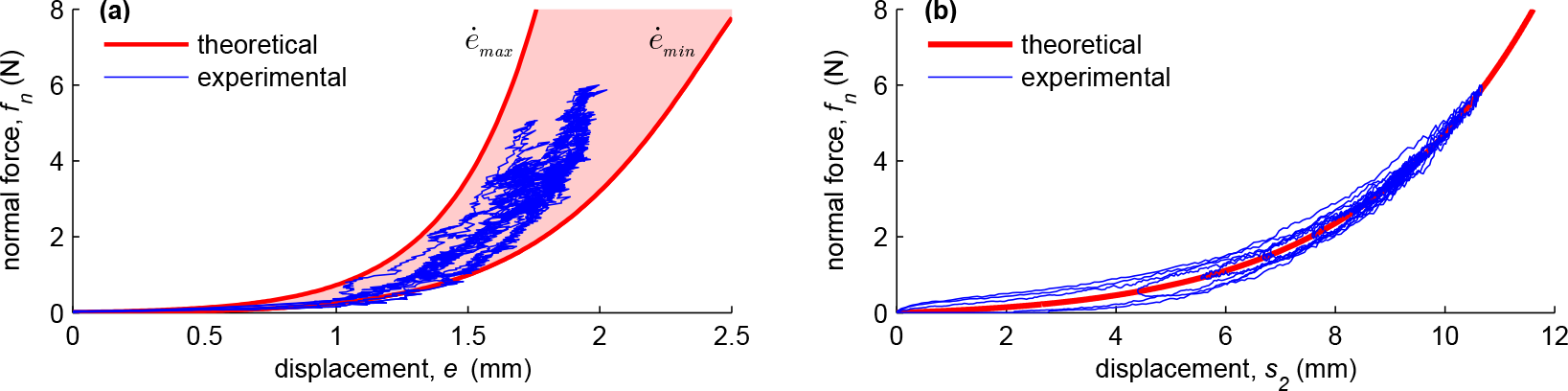
Normal force data; (a) f n vs. e; (b) f n vs. s2
Contact forces and the tangential (sliding) velocity data are shown in Figure 10. It should be clear in Figure 10 (a) that the normal and the friction forces f
n
and f
f
are much larger than the force component perpendicular to the friction force f
b
. The tangential force consists mainly of the LuGre frictional forces and the force f
b
is not zero probably due to limited resolution specifications of the haptic device, uncompensated dynamics and sensory noise-induced effects. Realizing that
Figure 10 illustrates how the friction force varies proportional to the normal force and the sliding speed. In analysing the data, rectangular sub-regions A and B are chosen and zoomed-in views are shown in Figure 10 (a) and 10 (b). When Regions A are examined, one sees that the fingertip sliding speed on the kidney surface is nearly constant and that the friction force varies proportional to the normal force. In Regions B, as the normal force is almost steady, there is an increase in the friction force as the soft fingertip sliding speed is raised. These observations present a matching trend with the LuGre friction model. Achieving better results is obviously dependent on acquiring a better haptic interface device. More complex interactive deformation simulations with more advanced dynamic friction models may then be possible.

Contact forces and the tangential velocity data (a) normal and frictional forces, f n and f f ; (b) sliding velocity of the virtual finger on the surface
4. Conclusions and Future Work
In this paper we propose and demonstrate the use of a soft-fingertip model in interactive haptic rendering of deformable surfaces. In developing a realistic haptic display environment, an improved physically based nonlinear three-dimensional constitutive model is developed for studying frictional contact and deformations of the soft-fingertip with mesh model of viscoelastic surfaces. For an accurate characterization of the friction force, a simplified form of the LuGre dynamic friction model is adopted where the tangential force is a function of both the sliding velocity and the normal force.
A novel type switching control scheme is developed for testing the proposed approach. The control strategy serves as a general framework for stable haptic rendering of frictional contact between the soft fingertip and the deformable surface. In the unconstrained space, a simple PD type controller allows the user to move the soft fingertip freely before it is brought into frictional contact with the surface. For the constrained motion, a closest point-based algorithm is employed together with a new type nonlinear deformation model. The deformation model accounts for both geometric and viscoelastic material nonlinearities and the contact forces are distributed locally around the contact location by incorporating an influence zone. Deformations with an area larger than a point are thus achieved by the soft fingertip moving on the viscoelastic discrete surface. A constraint-based controller is then employed to provide the user with a fast and accurate kinaesthetic stimulus as both the finger and the surface deform. The novelty of our approach lies not only in the design of the switching type control scheme but also in the fact that it could easily be adopted for use in other contact and deformation models.
A 3DoF parallel mechanism is used for implementing and validating the proposed approach. The soft fingertip interaction with a kidney tissue surface mesh is studied experimentally and the proposed analytical approach is validated. The results present accurate (realistic) interactions between the soft fingertip and the biological tissue. A fast, smooth and compliant haptic perception is achieved.
The dynamic set up presented points to a direction of research where more sophisticated compliant contact and deformation models are possible. Hence, the focus of our future research is concerned with developing an experimental platform for studying tactile pressure mapping and stress-strain distributions in biological tissues. The data collected will be used in developing more realistic frictional compliant contact models for use in haptic simulations and subjective evaluation tests. The contact model will be derived using a time- and rate-dependent modification of Hertz theory to capture the effects of both geometrical and material nonlinearities (such as the variations in the non-planar contact surface and the modulus of elasticity). In the process, a non-linear energy-minimization approach with a penalty based finite element formulation may be used, subject to volumetric constraints.