
Abstract
This paper describes an airborne vision system that is capable of determining whether an object is moving or stationary in an outdoor environment. The proposed method, coined the Triangle Closure Method (TCM), achieves this goal by computing the aircraft's egomotion and combining it with information about the directions connecting the object and the UAS, and the expansion of the object in the image. TCM discriminates between stationary and moving objects with an accuracy rate of up to 96%. The performance of the method is validated in outdoor field tests by implementation in real-time on a quadrotor UAS. We demonstrate that the performance of TCM is better than that of a traditional background subtraction technique, as well as a method that employs the Epipolar Constraint Method. Unlike background subtraction, TCM does not generate false alarms due to parallax when a stationary object is at a distance other than that of the background. It also prevents false negatives when the object is moving along an epipolar constraint. TCM is a reliable and computationally efficient scheme for detecting moving objects, which provides an additional safety layer for autonomous navigation.
Keywords
Introduction
Is it moving or not? In aerial navigation, answering this question can provide manned and unmanned vehicles with situational awareness in a dynamic environment, and the ability to avoid potential accidents. Safety is a growing concern for small but powerful autonomous vehicles as they increase in popularity (and numbers). Thus, it is paramount to differentiate between static and moving objects, either for the purpose of pursuing them or for avoiding collisions with them [1, 2].
Traditionally, ground-based (e.g., [3, 4]) or airborne (e.g., [5, 6]) radar has been employed to detect the motion of objects. However, with the growing trend towards Unmanned Aerial Systems (UAS) and micro UAS, these systems are excessively bulky, complex and expensive. The use of airborne radar to detect moving objects is complex, as it requires (as a prerequisite) knowledge of the egomotion of the radar system. To meet the cost and size constraints for a UAS, simple (yet effective) biologically inspired algorithms provide suitable alternatives to the traditional active sensors for navigation and guidance [7, 8, 9]. Studies have shown that insects, even with their tiny brains, can detect and pursue or evade moving objects by utilizing effective vision strategies that rely on monocular rather than stereo vision [10, 11].

Illustration of the ontic flow field generated in a moving vision system. In (a) and (b) the optic flow generated by the ground is indicated by the black arrows. In (a), an object moving on the ground can be detected on the basis that it generates a flow vector that is different in either magnitude (blue arrow) or direction (red arrow) from the flow that is generated by the background (black arrows). In (b), a stationary object that is raised above its immediate background is shown to generate motion contrast (red dashed arrow) even when it is stationary.
To intercept or avoid an object, it is first necessary to determine whether the object is moving or stationary, as this could alter the control strategy. If the object were deemed to be moving, the next step would be to use an appropriate control strategy to either intercept or evade the moving object, depending upon the requirements. This paper focuses on the first step – reliable classification of the status (stationary or moving) of an object, as viewed from a moving platform.
Classifying an object's motion (moving or static) is a relatively trivial task when a vision system is stationary. In this situation, the image of the background is stationary –only the image of the object is in motion. Consequently, the moving object can be detected only by computing the difference between two successive camera frames – this is known as ‘frame differencing’, as described in [12]. Frame differencing using a static camera is also sometimes referred to as ‘background subtraction’. In our paper, we refer to this procedure as ‘static background subtraction’, and use the term ‘background subtraction’ to refer to a different class of methods that are implemented on moving platforms, as we shall describe later. Static background subtraction is a relatively straightforward technique that has been described and implemented in a number of studies (e.g., [13, 14]). A somewhatmore complex approach for detecting a moving object from a static camera uses the ‘background segmentation’ technique, described in [15] and [16]. The method by [15] incorporates static background segmentation as well as optical flow information to detect discontinuities, which may indicate the location of overlaps between objects. Optic flow – in particular, the use of dense optic flow maps – is a common approach for detecting an object's motion from a static camera [17, 18]. This technique provides robustness to illumination changes but is computationally intensive. Yet another approach, implemented by various authors [19, 20, 21], detects ‘salient’ motion in an otherwise stationary scene by combining temporal image differences with information derived from optic flow.
The main limitation of all of the above methods is that they are constrained to a static camera. However, when the vision system is itself in motion, the task becomes more challenging because the images of the object, as well as the background itself, will be in motion even when the object is stationary.
One approach to detecting moving objects in this context is to compute the egomotion of the moving platform from the global pattern of the optic flow in the camera image, and to look for regions where the local direction of the optic flow is different from that expected of a stationary environment [22]. This can be thought of as an epipolar constraint. [23] also uses the epipolar constraint to detect independently moving objects in non-planar scenes. However, both these strategies fail when an object moves in such a way as to create an optic flow vector that has the same direction as the flow generated by the stationary background that lies behind it; that is, when the object moves along the epipolar constraint line [22, 23].
Another potential method by which a moving vision system cam detect a moving object is to use a cue based on motion contrast, i.e., the presence of a difference in the direction and/or magnitude of the object's image motion, relative to that of the image of the object's immediate background. The optic flow field can be used to detect motion contrast by looking for local differences in motion between the candidate object and its immediate backgroud [24, 25, 26, 27, 28]. However, this approach requires computation of dense optic flow, as sparse optic flow could overlook small or slow moving objects due to a poor signal-to-noise ratio, as demonstrated in [29]. However, the use of dense optic flow drastically increases the computation time, which is not ideal for real-time operation on a UAS. Alternatively, if the environment can be approximated by a plane (as, for example, during flight over flat terrain), the global optic flow that is generated by the entire background can be fitted to that plane, and any region of the image that exhibits an optic flow vector that differs from that predicted by the fitted plane would be flagged as a moving object. This technique, which is another way of detecting motion contrast, is known as ‘background subtraction’ [30, 31, 32, 33, 34, 35].
Motion contrast, as described above, can be used as a reliable indicator of a moving object if the object and its immediate background (dominant plane) are both at the same distance from the vision system. For example, in Fig. 1 (a), an object moving on the ground can be correctly detected on the basis that it generates a flow vector that is different in magnitude (blue arrow, p a to p b ) or direction (red arrow, p c to p d ) from the flow generated by the background (black arrows). However, if the object is stationary but raised above its immediate background (e.g., a stationary balloon or helicopter), the object will generate motion contrast (red dashed arrow in Fig. 1 (b), p e to p f ) even when it is stationary, and can therefore be incorrectly classified as moving when it is static – in Fig. 1 (b), the blue arrow (p a to p b ) illustrates the flow vector if the object was stationary on the ground. A vision system that detects moving objects on the basis of motion contrast will therefore falsely classify raised stationary objects as ‘moving’ ones. This drawback of false positives is a common feature of many existing vision algorithms that rely simply on motion contrast cues to detect moving objects.
This paper presents an extension of the work conducted in [36] by conducting comprehensive field tests of our algorithm on a UAS flying in an outdoor environment, as well as a comparison with the popular Background Subtraction Method (BSM) and an Epipolar Constraint Method (ECM). Unlike these other schemes, our novel scheme, TCM, does not produce such false positives and signals reliably whether or not an object is moving, and regardless of the object's position in relation to the background. TCM has the added advantage that the object can be viewed against an arbitrary, non-planar background. TCM is also able to determine that an object is moving when it evolves along an epipolar constraint plane (with the exceptions detailed in Section 6.5). Furthermore, TCM can be used in a vision system deployed on a terrestrial vehicle or an airborne vehicle, to reliably classify whether an object is moving or stationary, regardless of whether the object is on the ground or in the sky. Although we as humans can easily distinguish between moving and static objects, a little reflection will reveal that these examples are challenging problems for a machine's vision.
The outline of this paper is as follows: Section 2 describes the novel approach and algorithm underlying our technique for detecting moving objects from a moving platform, which overcomes the limitations of the techniques mentioned above. We term this technique the Triangle Closure Method (TCM). Section 3 describes optimization of the TCM algorithm's parameters. Section 4 describes the flight platform and the experimental design. Section 5 reports experimental results of field tests of TCM onboard a quadrotor platform. Section 6 describes our implementation of the popular background subtraction and epipolar techniques, compares the performances of TCM to those of BSM and ECM, and outlines their limitations. Finally, Section 7 discusses the results, implications and limitations of this study.
Problem description and assumptions
The main objective of the Triangle Closure Method (TCM) is to determine from a moving vision system whether an object is moving or stationary. This is a particularly challenging problem considering that everything in an image moves from frame-to-frame if the vision system itself is in motion. Consider an example in which the image of an object has moved leftward, as viewed by the camera system onboard the UAS. The following scenarios could all explain this example: (1) the target could have moved to the left, (2) the quadrotor could have moved to the right or (3), both (1) and (2) could have occurred. TCM, however, can disambiguate these three conditions and overcome many of the limitations of techniques that rely on sensing motion contrast or using the epipolar constraint, as discussed in Section 1. The assumptions that were made to simplify this challenging problem include:
The object is easily detectable.
The object's shape is invariant to viewpoint changes.
The object is small enough that its motion does not affect the aircraft's vision-based egomotion estimation.
To satisfy the above assumptions, a red ball was used as the target. The second assumption can be relaxed, as discussed in Section 6.5. The third assumption is also satisfied in this case, as the optic flow algorithm used rejects areas of the image that break the planar assumption (e.g., trees, buildings, etc.).
Although these assumptions are made, the TCM approach does not require additional a priori knowledge of the object's size or its distance from the vision system.
Object detection
Before the motion of the object can be determined, it first needs to be detected. There are numerous methods for detecting an object. We emphasize that this paper focuses primarily on distinguishing between moving and stationary objects, and not on the detection of the object. We detect the object by using a well-established approach based on seeded region growing, as described in [37]. This method was applied on top of simple colour-based segmentation to increase the robustness to illumination changes and specular reflection.
The colour-based algorithm has the added benefit that an object can be detected without prior knowledge of its size or shape. The seeded region-growing algorithm, applied to the set of pixels that are selected initially by their colour, links the selected pixels together and ultimately produces a region that encompasses the entire object, as illustrated in Fig. 2. The centroid (pixel location) and radial size of the region (in pixels) are then computed (see Fig. 2). The centroid and radial pixel size of the object are then used in the TCM algorithm to classify the object's motion status.

(a) Raw image obtained by the vision system (see Section 4.1), showing a red object positioned above a ground plane. (b) Illustration of the object's detection. The green pixels represent the detected object. The red dot represents the centroid of the object, as computed by the seeded region growing algorithm. Note that the algorithm detects only the object, and not its shadow.
In this section, we present a novel algorithm for determining whether an object is moving or stationary, from an airborne vision system that uses purely visual information. It is also possible to determine whether multiple objects are moving or stationary by applying TCM to each object. As stated in Section 2.1, this approach does not require additional a priori knowledge of the object's size or its distance from the vision system. Furthermore, it might be surmised that the TCM method adopts the well-known ‘epipolar constraint’ or ‘coplanarity constraint’, but in fact it goes beyond merely utilizing the object's 3D position, as computed from two viewpoints, to determine whether an object is moving or stationary.
Rather, if the motion of the aircraft is known (or can be inferred), then the status of an object in the environment can be classified as moving or stationary by comparing the expected ratio of the distances to the object from the two aircraft positions (q0 and q1) with the observed ratio of the sizes of the object's images in the two frames. If the object is stationary, these two ratios will be equal; if the object is moving, they will not be equal.
The procedure for determining whether an object is stationary or moving (in 3D) therefore consists of the following three steps, as illustrated in Fig. 3:
Compute the direction vectors to the object in the two camera frames.
Calculate the angular expansion of the image of the object between the frames.
Determine whether the object is moving by comparing the ratio of the predicted distances to the object from the two aircraft positions, with the measured ratio of the image sizes. A mismatch between these ratios indicates that the object is moving.
The TCM requirements and procedures are described in greater detail below.
The TCM procedure requires information about the translational egomotion of the aircraft. Throughout the experiments described in this paper, egomotion is inferred by computing the optic flow generated in the panoramic image between the two frames. The flow vectors are computed using an iterative 400-point pyramidal block-matching algorithm. The motion of the aircraft is then estimated from the optic flow by using an algorithm that characterizes the 3D motion of the aircraft in terms of a 3D translational vector (T) and a 3D rotational vector (R), as described in [38, 39]. Note that this egomotion computation, which is used as an input to the TCM algorithm, also utilizes information from the onboard AHRS – to determine the aircraft's instantaneous orientation relative to the ground plane and to enable the egomotion's computation [38, 39]. The onboard AHRS could in principle be replaced by visually estimating the attitude for a vision-only solution [40].
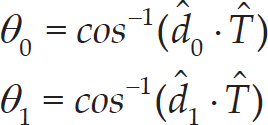
The translational component (T) of the aircraft's egomotion is used to assess the motion of the object as follows. In Fig. 3, the aircraft has been translated from the position q0 (at time t0) to the position q1 (at time t1). At time t0, the centroid of the object is at p0. The object has a viewing direction of θ0 in the aircraft's vision system, and an angular size of α0.
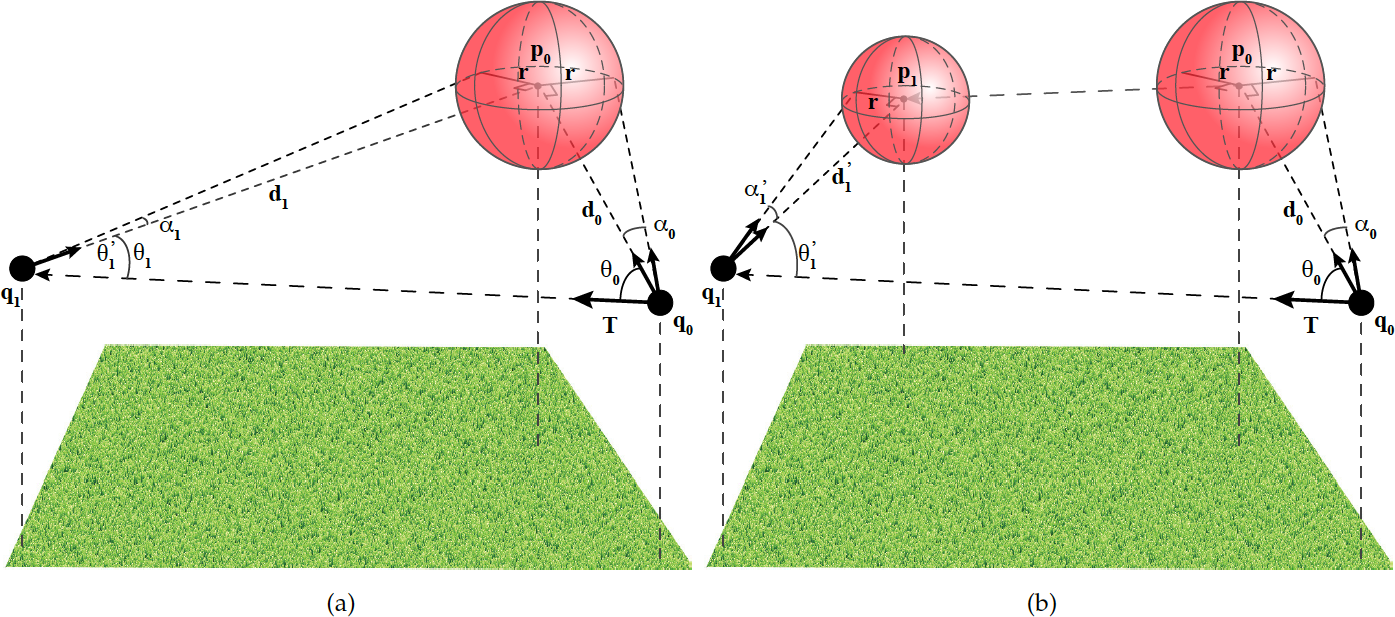
Determination of whether an object is moving or static. (a) Information about the UAS translation unit direction (T), the unit direction vectors (d0 and d1) connecting the UAS and the object and the expansion of its image between two camera frames. α0 and α1 represent the angular sizes of the images of the object in the two frames. A closed triangle is formed between the motion of the UAS (from position q0 to position q1) and the static object (at position p0). (b) Primed symbols represent the angles and vectors, had the object moved between two frames.
At time t1, when the aircraft has translated by the vector T, the object would be viewed in the direction θ1 and would have an angular size α1 – had it been stationary. However, if the object had moved during the period between t1 and t2 and now occupied a new position (p1), it would be viewed from a different direction (θ1') and would have a different angular size (α1'). The viewing directions and angular sizes, as measured before and after the translation (i.e., at times t0 and t1), are used to infer the motion status of the object, as described below.
The vectors d0 and d1 are the directions from the quadrotor positions (q0, q1) to the object positions (p0, p1), respectively. These directions are determined by first computing the centroid of the image of the object, as discussed in Section 2.1, and then converting the pixel centroid to a 3D unit vector by using the camera model. The UAS translation vector and the object direction vectors are then used to compute the angles θ0 and θ1 using (3) below. Once these angles are computed, the change in the size of the object's image is used to determine the change in relative distance between the UAS and the object. Consider an object, in this case, a red ball, approaching the UAS. As the object approaches the vision system it will appear larger in the image, thus the angular size will increase (α0 < α1 in Fig. 3). The opposite would be true if the object were receding: the angular size will then decrease (α0 > α1 in Fig. 3). Therefore, the change in the size of the object in the image can be used to compute the change in distance (d0 / d1), as shown in (1). If the object were stationary, the change in distance (d0 / d1) would be equal to both the ratio of the tangent object's angular sizes from t0 to t1 (1), and the ratio of the sines of the angles θ0 and θ1 (2), as dictated by the geometry of a triangle:


where
and d0 and T are unit vectors. As both (1) and (2) are equal to the ratio of the initial and final distances from a stationary object, the angles θ0 and θ1, and α0 and α1, would be related as shown in (4), below. However, this relationship only holds if the object is stationary. If the object is moving, there will be a disparity (δ) 1 between the expected change in distance (2) and the measured change in distance (1). This disparity value is calculated using (5), and is used to determine whether the object is moving or stationary.

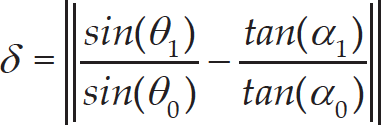
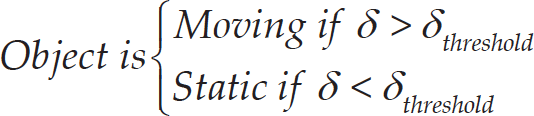
In theory, a stationary object would produce zero disparity (δ = 0), and a moving object would generate a non-zero disparity (δ ≠ 0). However, due to noise in the measurements of aircraft translation (egomotion), and in the measurements of the directions and sizes of the object in the images, even a stationary object will generate some disparity value. Therefore, a disparity threshold (δ threshold ) is used to classify the motion of the object as either moving or stationary, as shown in (6).
A factor that influences the sensitivity of the detection of target motion is the angle between the directions of motion of both the target and the quadrotor. A smaller angle between these directions will produce a diminished disparity signal (for an extensive signal-to-noise analysis, see [36]). To improve the reliability of TCM, it is computed from two camera frames separated by an interval of 25 frames, as detailed below in Section 3.1. This frame interval increases the signal-to-noise ratios of the various angle measurements and provides more reliable results, provided that the computation of both optic flow and egomotion remain reliable over this larger inter-frame interval (which turns out to be the case in our experiments).
To optimize the TCM algorithm, two control flight tests were conducted. In the first control flight, the object was stationary and in the second control flight, it was moving back and forth throughout the test – the motion was perpendicular to the quadrotor (T90), see Section 4. In Fig. 4 (a), the time course of the measured disparity is shown in red for the static object, and in green for the moving object. The green curve displays strong oscillations at twice the frequency of the oscillation of the object, because the disparity is either high or low according to whether the object is moving at a high speed (at the mid-point of its oscillatory trajectory) or at a speed close to zero (when its direction changes).

Determination of separation between the disparity responses for a stationary object and a moving object for various frame intervals. (a) TCM disparity for a moving target (green) and a static target (red) to compute separation. μ m (solid black) is the mean disparity value for the moving target, and σ m (dashed black) is the corresponding standard deviation. μ s (solid blue) is the mean disparity value for the static target, and σ s (dashed blue) is the standard deviation. (b) Measured separations for frame step values ranging between [0, 40] frames. The dashed line is a third order polynomial fit with R2 = 0.91.
The parameters that were optimized were the frame interval (the number of frames between comparisons) required to enhance the signal-to-noise ratio, and the threshold (δ threshold ) for classifying an object as either moving or stationary.
To determine the best frame interval, a range of intervals ([0,40] frames) was trialled on the control data set. To obtain a metric of the effectiveness of each of the frame intervals, the separation between the moving target disparity and the static target disparity was calculated using (7) from the means and standard deviations of the disparity curves, as illustrated in Fig. 4 (a).

Fig. 4 (b) shows the calculated separation for various frame intervals. A negative separation means that classification between the moving and static targets will be less accurate because the disparity values for a moving target will overlap with the static disparity threshold, and vice versa. It is evident that the best separation (approximately 0.06) is obtained with a frame interval of 25 frames.
A frame interval of 25 frames is used throughout the testing of the TCM method as this interval produced the best separation between moving and static targets. Using this frame interval, we can now determine the optimal threshold for achieving maximum classification accuracy, as described below.
First, the accuracy of the method, as defined in (8), was used to provide a metric indicating the effectiveness of each threshold value. Here, TP is the number of True Positives, TN is the number of True Negatives, FP is the number of False Positives and FN is the number of False Negatives.

Classification accuracy (8) was used to determine the optimum threshold disparity, δ threshold , for reliable detection using the same control data.
As shown in Fig. 5, the disparity threshold varied between 0 and 1 to determine the value for the best classification accuracy. The optimum threshold was computed for various size images (shown in Table 1) to determine the effect of image resolution on both the threshold and the accuracy of the classifier.

Classification accuracy (green) as a function of the disparity threshold for TCM (360×220 pixel image). The false positive rate (red) and true positive rate (blue) are also illustrated for different thresholds.

Our UAS set-up (a), a custom-built quadrotor used for outdoor flight tests (b) and a unique panoramic vision system (c)
Optimal thresholds for the Triangle Closure Method (TCM) computed for various image resolutions (with the same field of view)

A threshold value of 0.09, corresponding to the average of the values shown in Table 1, was used for testing the TCM method.
Flight platform
The UAS set-up used in our study, as shown in Fig. 6 (a), includes a laptop that is used merely to initiate the program on the quadrotor (no off-board processing is conducted on the laptop), a Differential GPS (DGPS) base station for ground truth and the quadrotor. The custom-built quadrotor (Fig. 6 (b)) comprises a MicroKopter flight controller. Data obtained by the onboard sensors and the vision system are processed using an Intel NUC, featuring an Intel i5 core 2.6GHz dual-core processor, 8GB of RAM and a 120GB SSD. The platform also carries a MicroStrain 3DM-GX3-25 Attitude and Heading Reference System (AHRS), a Ublox 3DR global positioning system (GPS), a Swift Navigation Piksi DGPS and a vision system, as illustrated in Fig. 6 (c). Note that the GPS and DGPS are only used for obtaining the ground truth, and are not used for navigation.
The vision system consists of two fisheye cameras (Point Grey Firefly MV cameras, Sunex DSL216 lenses). The cameras have a 25Hz frame rate. They are software synchronized and mounted back-to-back. Synchronized frames from the two cameras are stitched together using a camera calibration similar to that described in [41] to produce a panoramic image with a 360° by 150° field of view (360 by 220 pixel resolution).
Field testing
Nine outdoor tests were conducted, broken into three scenarios: a static object (TS), an object moving at 45° to the quadrotor's trajectory (T45) and an object moving perpendicular to the quadrotor's trajectory (T90), as illustrated in Fig. 7. The object, a 75cm diameter ball, was either static (TS) or moved back and forth over a distance of approximately 2m along the two different axes (T45 and T90), as shown in Fig. 7 (a). The oscillation frequency of the ball was approximately 0.35Hz throughout all the T45 and T90 tests, where the quadrotor underwent oscillatory motion at a rate of approximately 0.1Hz. The centre of the ball was positioned at a height of 1m above the ground. The quadrotor flew in an approximately straight 3m trajectory back and forth along a trajectory to the left of the ball, at a height of 2m (see Fig. 7 (a) and Fig. 7 (b)).
Ground truth
To provide a verification of the Triangle Closure Method, information from the GPS and DGPS was used to obtain the ground truth (GT) trajectories of both the quadrotor and the moving object. The GPS information was used to log the translation direction (T in Fig. 3) of the quadrotor, and the DGPS information provided the instantaneous distance between the UAS and the object (d0 and d1 in Fig. 3). The GPS does not deliver reliable ground truth data for the absolute position but provides more accurate velocity measurements. Thus, the GPS provides an accurate estimate of the direction of travel. These parameters provide all of the requirements to compute the true motion disparity of the object, as explained in Section 2.3.
Experimental Results for TCM
In this section, we present the results of various tests of the Triangle Closure Method (TCM), using a disparity threshold of 0.09, a frame interval of 25 frames and an image size of 360×220 pixels. The results provide a quantitative measure for our vision-based classification algorithm by comparing performance against ground truth (GT) data obtained from the GPS and DGPS measurements (see Section 4.2 for a full description of field testing and GT determination). Fig. 8 (a-c) show the mean and standard deviation of the disparity values for each set of the three TS, T45 and T90 experiments (for detailed statistics on each, see Table 2).

Experimental design. (a) Schematic plan depicting the motion of the quadrotor and the object for the three scenarios: a static object (TS), an object moving at 45° to the quadrotor's trajectory (T45) and an object moving perpendicular to the UAV translation (T90). Experimental set-ups illustrating the motions of the UAV and the target for T90 (b) and T45 (c).
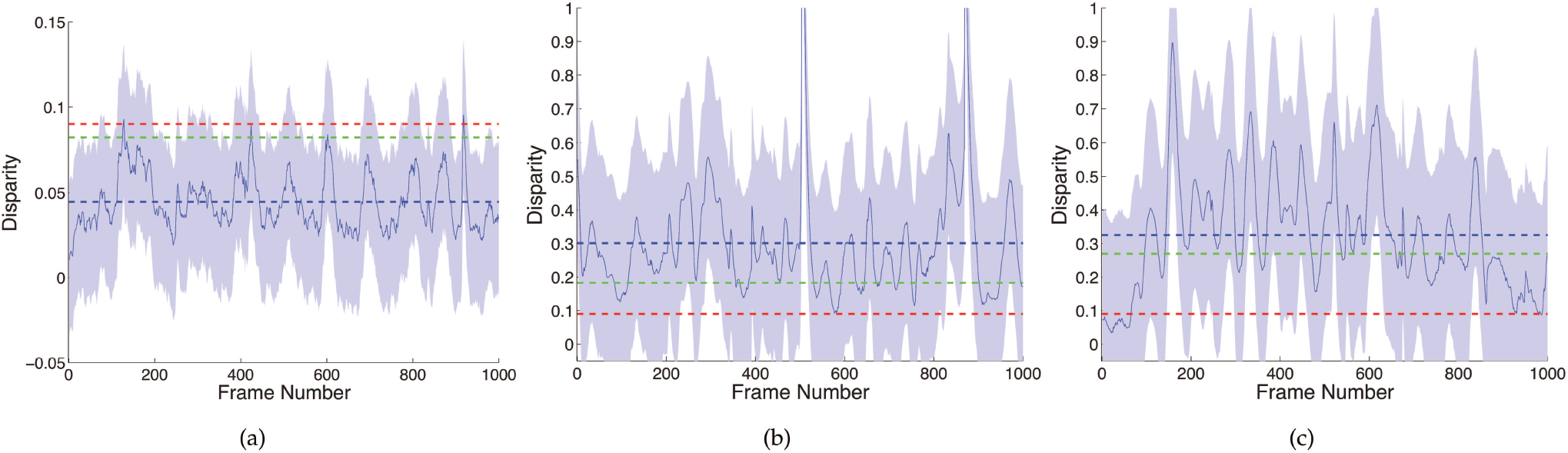
Mean and standard deviation disparities computed by TCM for the set of three tests within each scenario: (a) static object (TS), (b) object moving 45° to the translation direction (T45) and (c) object moving 90° to the translation direction (T90). The solid blue line and shading represent the mean and standard deviation of the three flight tests, respectively, while the blue dashed line is the overall mean of the disparity as computed by the vision-based TCM method. The green dashed line signifies the overall mean computed by the ground truth and the red line represents the disparity threshold.
Fig. 8 (a) displays the results for tests conducted with a stationary object. Here, the TCM data do not display the large periodic oscillations of Fig. 8 (b-c) because the target is not moving; however, there is still some oscillatory noise as the quadrotor moves back and forth. Fig. 8 (b-c) display the results of moving object tests (T45 and T90 conditions). In these cases, there are clear, periodic oscillations in the TCM.
It is possible to see that the majority of the data in the TCM curves and GT mean lines lie below the threshold of 0.09 with the static object (see Fig. 8 (a)), and above this threshold in the cases of the moving objects (see Fig. 8 (b) and Fig. 8 (c)). The larger oscillations and spikes in the T45 and T90 tests are due to the object and the UAS being moved back and forth in an oscillatory fashion, as described previously.
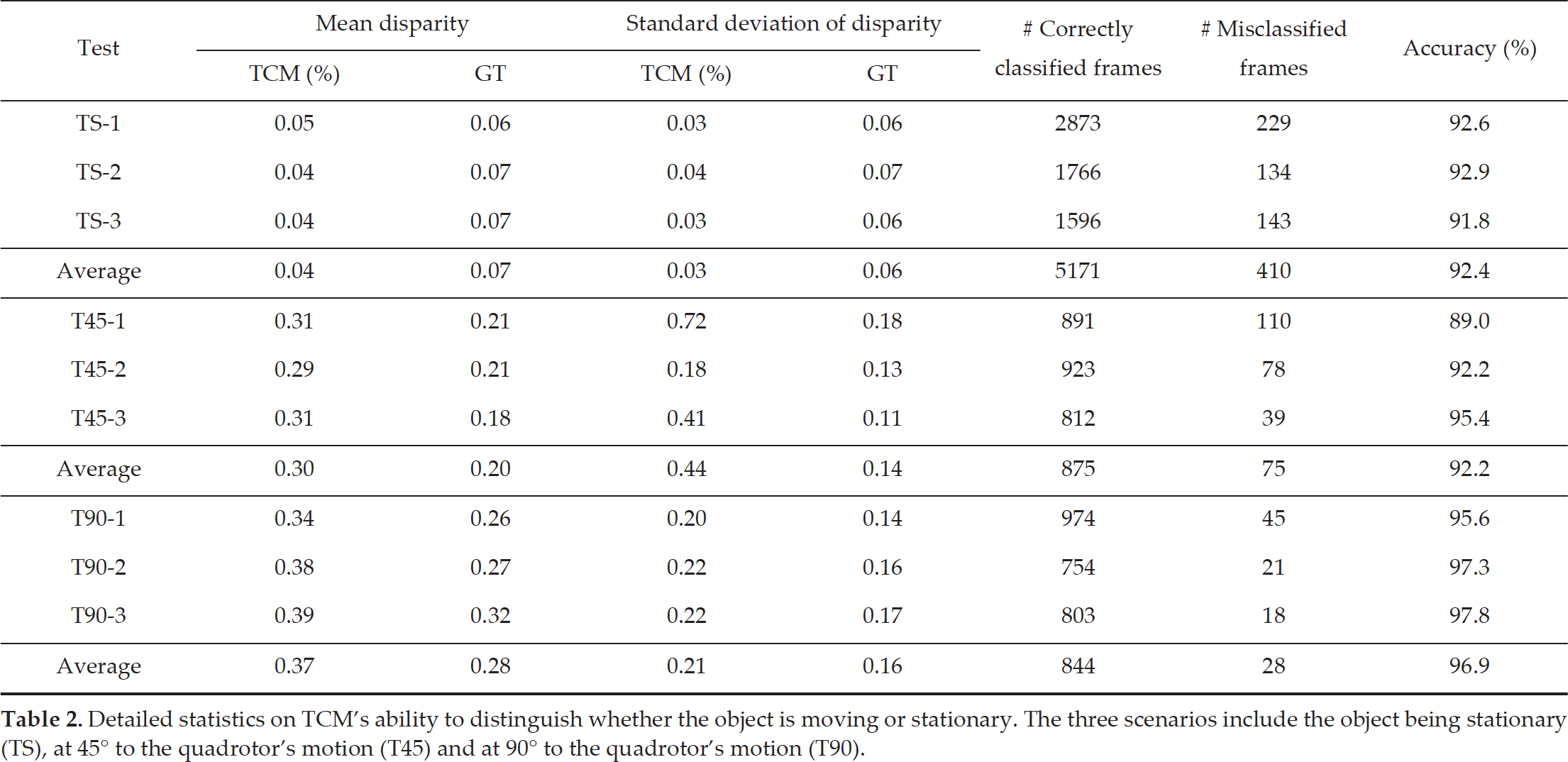
Table 2 provides an overview of the results for all the outdoor flight tests (TS, T45 and T90). Over the three static object tests (TS-1, TS-2 and TS-3), the mean disparity using the vision algorithm was found to be 0.04, with a standard deviation of 0.03. A mean of 0.07 and a standard deviation of 0.06 were calculated for the ground truth disparity. The average accuracy over the three static (TS) tests was determined to be 92.4% – where the classification accuracy was calculated according to (8).
The results for object motion at 45° to the UAS translation (T45) produced mean disparities of 0.30 and 0.20, respecttively, for the TCM results and the ground truth data, with corresponding standard deviations of 0.44 and 0.14. As in the static object experiments, the mean detection accuracy for the T45 tests was 92.2%.
Finally, the mean disparity for the T90 tests using the vision algorithm was found to be 0.37 with a standard deviation of 0.21, and a mean disparity of 0.28 and a standard deviation of 0.16 were calculated for the ground truth disparity. The average accuracy for the T90 experiments was 96.9%.
Two control flight tests were used to compare the performance of the Triangle Closure Method, Epipolar Constraint Method and the Background Subtraction Method. The object was stationary in the first control flight, and was moving back and forth throughout the test in the second. As in Section 5, in all of these tests, the centre of the object was raised 1m above the ground.
Detailed statistics on TCM's ability to distinguish whether the object is moving or stationary. The three scenarios include the object being stationary (TS), at 45° to the quadrotor's motion (T45) and at 90° to the quadrotor's motion (T90).
Detailed statistics on TCM's ability to distinguish whether the object is moving or stationary. The three scenarios include the object being stationary (TS), at 45° to the quadrotor's motion (T45) and at 90° to the quadrotor's motion (T90).
The performance of TCM was compared with that of the Background Subtraction Method (BSM), which is a traditional technique that is widely used for the detection of a moving object. Background subtraction has been implemented for detecting moving objects from a stationary vision system, and occasionally from a moving vision system.
This section describes the Background Subtraction Method we used to detect moving objects from a UAS. To perform background subtraction using a moving platform, the rotation and translation of the UAS must be accounted for. In this paper, optic flow is used to compute the aircraft's egomotion, and the motion of an object is detected by sensing the motion parallax between the object and the background. The translation and rotation of the aircraft are computed using the same optic flow algorithm as described in Section 2 [38, 39]. Using the computed egomotion, the current frame is de-rotated and each pixel on the ground plane is de-translated into the previous frame. The same 25-frame interval is used as in TCM. Once the egomotion is accounted for in the current frame, the absolute frame difference is computed between the current and previous frames. This operation highlights the image of any object that moves relative to the image of the ground plane. The moving object is then detected by applying a pixel-wise threshold to the absolute difference image. This binary image is then used to detect moving objects by summing the number of pixels equal to 1, and applying a detection threshold.
For BSM, the threshold for detecting whether an object is moving or stationary is related to the number of suprathreshold pixels detected, as shown in Fig. 13 (c) and Fig. 14 (c). The range of thresholds examined to optimize the BSM classifier was [0,1000]. As with TCM, the optimum thresholds for the BSM were computed for various image resolutions (shown in Table 3).
Epipolar Constraint Method (ECM)
The Epipolar Constraint Method (ECM) can be used to determine whether an object is moving or stationary due to the geometric relationship between two image frames [42, 23]. It is shown in Fig. 9 (a) that the two UAS locations q0 and q1 (i.e., the two camera viewpoints in 3D space) and the world point P defines a plane – this plane is also known as the epipolar plane. Now let 0p and 1p define the two points represented by the projection of the world point P onto the two image frames at the locations q0 and q1, respectively, which are known as conjugate points, as discussed in [42]. In our case, the image locations 0p and 1p are determined by the colour-based method discussed in Section 2.2. These conjugate points define the directions of the target when it is viewed from locations q0 and q1, respectively. These directions are denoted by the vectors o0 and o1. The vectors t and o0 define the epipolar constraint plane, whose normal is denoted by the vector n0. We can determine whether the object remains in the epipolar plane after the quadrotor has moved to q1 by computing the normal to t and o1, dented by n1 and examining whether n1 is parallel to n0. If n1 is parallel to n0, the object lies in the epipolar plane and is inferred not to have moved, as illustrated in Fig. 9 (a). If n1 is not parallel to n0, the object no longer lies in the epipolar plane and is inferred to have moved, as illustrated in Fig. 9 (b).
In order to determine whether the two direction vectors o0 and o1 conform to the epipolar plane constraint, the normal vectors n0 and n1 are computed by the cross products n0 =t x o0 and n1 = t x o1. To determine whether the direction vectors o0 and o1 satisfy the epipolar plane constraint, the angle (Ω) between n0 and n1 is computed, where:

Determination of whether an object is stationary (a) or moving (b) using ECM. Information about the UAS translation unit direction (t) and the unit direction vectors (o0 and o1) connecting the UAS and the object are required between two camera frames for ECM.
Performance of TCM compared to those of ECM and BSM for various image resolutions


Here, the object is deemed to be moving when the angle between the normal vectors, Ω, is greater than the threshold (Ω threshold ). Fig. 9 (a) illustrates a static object whereby the two direction vectors satisfy the epipolar plane constraint (i.e., n0 = n1) and Fig. 9 (b) demonstrates a moving object that breaks the geometric constraints of the epipolar plane (i.e., n0 ≠ n1).
The threshold for detecting whether an object is moving or stationary for ECM is based on the angular disparity between the two normal vectors n0 and n1. The range of thresholds explored in order to determine the optimal threshold for maximum accuracy was [0,1]. As with TCM and BSM, the optimum thresholds for the ECM were computed for various image resolutions (shown in Table 3).
By knowing that in one test the object was always static and in the other it was constantly moving, the true positives (TP) (where a true positive is a moving object that is detected to be in motion) and true negatives (TN), and the false positives (FP) and false negatives (FN), were computed for various threshold levels at different image resolutions. The reliability of detection was evaluated by calculating a Receiver Operating Characteristic (ROC) plot, which includes TP, TN, FP and FN values.
Once the statistics were computed for TCM, ECM and BSM with varying thresholds, a ROC curve was plotted for each method. The ROC curve is a plot of the False Positive Rate (FPR), calculated by (10), compared to the True Positive Rate (TPR), calculated by (11). The area under the ROC curve quantifies the ability of the method to distinguish reliably between a moving and a static target – an area of 1 represents a perfect classifier. To compare the performance of the different techniques discussed in this paper, the maximum accuracy, ROC area and optimal thresholds are determined for various image sizes, as shown in Table 3.

Each method was evaluated for various image resolutions, to determine the optimum threshold and the effects on classification accuracy. It is observed that the Background Subtraction Method increases in accuracy from 57.87% for a 360×220 pixel image to a maximum accuracy of 77.28% for a 900×550 pixel image, and then marginally reduces in accuracy for the largest image size. On the other hand, the accuracy rates of TCM and ECM remain approximately constant. ECM has an accuracy of approximately 87% compared to TCM's maximum accuracy, which is above 90% across the different image resolutions. It is also interesting to note that the optimum threshold for the Background Subtraction Method increases with image resolution, whereas the optimum thresholds for the Triangle Closure Method and Epipolar Constraint Method are invariant. Thus, TCM and ECM provide more reliable approaches that can be used with image resolutions to suit a range of applications, without requiring a change or re-exploration of the optimum threshold parameters.
Although the performance of the Background Subtraction Method improves with higher image resolutions, it never attains the accuracy of either TCM and ECM even at the highest image resolution. Furthermore, the Background Subtraction Method works best with high image resolutions, which is often not feasible in real-time applications.
The ROC plot in Fig. 10 compares the performance of TCM (green curve), ECM (blue curve) and BSM (black curve). The optimal image size of 900×550 pixels is used for the Background Subtraction Method, compared to the 360×220 pixel image size for TCM and ECM. The reason for using the smallest image size for TCM (although it is slightly less accurate) is the computational cost, as discussed in the next section. It is clear that TCM demonstrates higher reliability than either ECM or BSM, despite the greater image resolution used for the BSM.

ROC plot comparing the performance of the Triangle Closure Method (TCM) (green) (320×220 pixel resolution) with that of the Epipolar Constraint Method (ECM) (blue) (320×220 pixel resolution) and the Background Subtraction Method (BSM) (black) (900×550 pixel resolution)
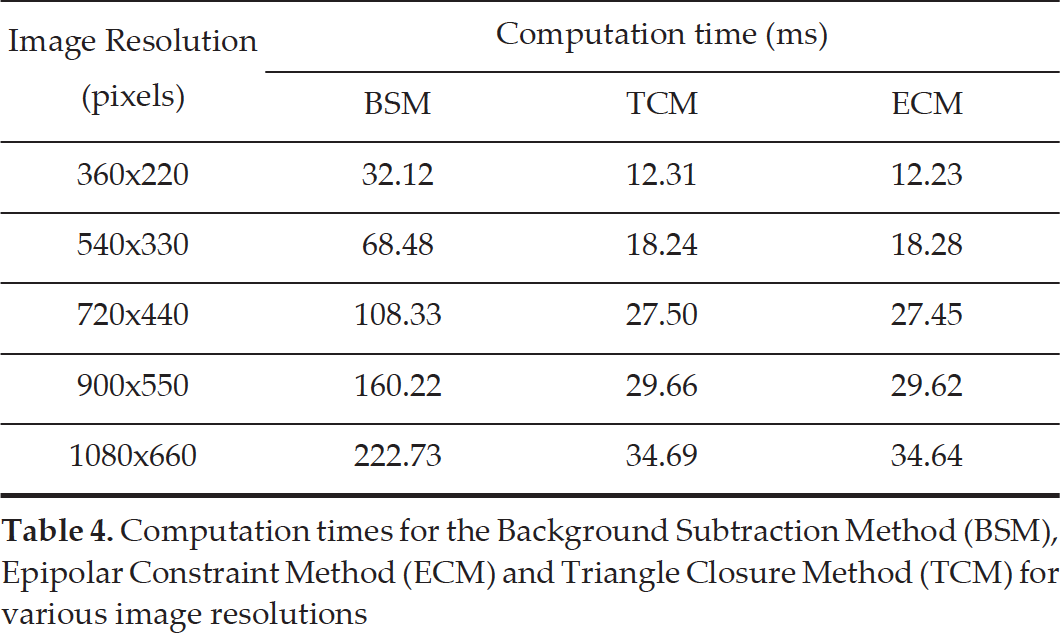
The time that it takes to detect an object and classify its motion status could make the critical difference between avoiding an object and colliding with it. To compare the timings of the three methods described in this paper, all techniques were tested under the same conditions, using the same image resolutions. Table 4 summarizes the computation time for each method for various image resolutions. It is evident that the Triangle Closure Method is computationally faster than the Background Subtraction Method. For the 360×220 pixel resolution, which was used on the platform, background subtraction took approximately 32ms per frame, compared to our Triangle Closure Method, which requires only about 12ms. In terms of computation time, the performance of ECM is very similar to that of TCM, as both utilize the same colour-detection algorithm – both approaches are significantly faster than the BSM.
Computation times for the Background Subtraction Method (BSM), Epipolar Constraint Method (ECM) and Triangle Closure Method (TCM) for various image resolutions
Computation times for the Background Subtraction Method (BSM), Epipolar Constraint Method (ECM) and Triangle Closure Method (TCM) for various image resolutions
For a UAS to fly autonomously it needs to be able to process all data in real time – in this paper, real time is considered to be 40ms, corresponding to a standard video frame rate of 25Hz or faster. All timings were measured on the flight computer (see Section 4.1 for additional information). The fastest processing time for the BSM is approximately 32.12ms. Even though the processing time for the BSM is below 40ms, when other processes such as image preprocessing, stereo height computation and optic flow – all of which run in under 13ms on a 320×220 pixel image – are factored into the computation time, the total processing time for BSM increases to over 45ms. With the TCM, on the other hand, all processing can be completed in less than 25ms, which is well below the 40ms requirement. Note that no additional optimizations have been implemented into either method. Admittedly, it is possible to optimize the BSM method by using a graphical processing unit (GPU).
TCM
One limitation that would compromise the ability of TCM to detect a moving object is when the object moves along a head-on collision trajectory. However, the TCM already employs looming cues, which could be used on their own to determine the time to collision and to initiate an evasive manoeuvre. This idea of time to contact (TTC) is well studied: for example, plummeting gannets use TTC to retract their wings before diving into water [43]. Secondly, an object that moves along a trajectory parallel to that of the UAS will generate the same disparity (zero) as a stationary object at a greater distance, as is illustrated in Fig. 11 (a), and will therefore be deemed to be stationary: d1 / d2 = D1 / D2. On the other hand, an object that moves in a direction different to that of the quadrotor (e.g., Fig. 11 (b)) will always generate a non-zero disparity (d1 / d2 ≠ D1 / D2) and will therefore always be accurately classified as moving. In the special case of parallel motion, the object moves in such a way as to conceal its motion (‘motion camouflage’, as described by [44]), and is therefore undetectable by any monocular vision-based algorithm, including ours. However, such an object is not a potential threat, as it would always be at a safe distance away from the UAS.

Object moving parallel (a) and non-parallel (b) to the aircraft
In this work, we have assumed that the object is spherical. Therefore, the shape of the object's image is always a circle, regardless of the viewing direction. This simplifies the task of computing changes in the distance between the object and the UAS – it is only necessary to measure the change in the size of the object's image, in terms of pixel coverage. The situation would be more complex, however, if the object's shape is very unlike that of a sphere, because the shape of the image would then vary depending upon the viewing direction, and the image size would not be directly related to the object's distance. This problem could be solved by tracking the distance between two distinct features on the object, or by evaluating the change in image size along an axis perpendicular to the UAS's translation direction.
Although ECM does not require the spherical assumption as in TCM, the ECM has a crucial shortcoming. Consider, again, the two direction unit vectors o0 and o1, as illustrated in Fig. 9 (a). An object can fool the ECM if it were to move in such a way as to ensure that the direction vector o1 crossed with the translation vector t, producing the same normal vector n1 as when it had while being static. That is, the target is deemed to be static when it is, in fact, moving. One such example is highlighted in the data set used to compare the three methods, where the object and quadrotor move in such a way that the direction of the target in the visual field of the quadrotor's vision system (the position in the image frame captured by the vision system) remained constant, as is demonstrated by the video sequence in Fig. 12 (b) and is further explained by the schematic in Fig. 12 (d). The object can only be detected if the epipolar constraint is violated as shown in Fig. 12 (a) and Fig. 12 (c). On the other hand, TCM will correctly classify the object as moving because it additionally monitors the image size of the target.
BSM
Fig. 13 and Fig. 14 illustrate the performance of the background subtraction algorithm. The algorithm reports the object to be moving in the examples of Fig. 13 as well as Fig. 14; however, motion was only present in the example of Fig. 13. Thus, the Background Subtraction Method erroneously reports the object as moving even in Fig. 14, when in reality it is static – the opposite problem to that of the ECM. This is because the stationary object produces motion contrast against the background when it is raised above the background.
Discussion
TCM was able to correctly classify whether the object was stationary or moving in three test scenarios: a static object (TS), an object moving at 45° to the quadrotor's trajectory (T45) and an object moving perpendicular to the quadrotor's trajectory (T90). In all of these cases, the quadrotor was translating back and forth (see Section 4.2 for further details). It is possible to detect whether an object is moving or static with a variety of angles between the quadrotor and target translation directions; however, in this paper, only a subset of directions were used to demonstrate the effectiveness of TCM.
To evaluate the accuracy of TCM, the algorithm was compared against ground truth data from the GPS, which provided information on the translation of the aircraft, and the DGPS provided information on the relative distance and the direction to the object. The update rates for the GPS and DGPS are 5Hz; thus, there are discrepancies between the ground truth and the TCM algorithm, which runs in real time at 25Hz. Even with these differences in sampling rates, the signals as computed by TCM correlated with the ground truth data.
The Triangle Closure Method is also shown to have overcome some of the limitations of both the Background Subtraction Method and the Epipolar Constraint Method. One of the major limitations that is solved by TCM and not by BSM is the occurrence of false detections due to the motion parallax that is generated when a stationary object is not a part of the dominant plane – here, the dominant plane is used to compute motion contrast between frames. Thus, an object such as a lamp post or an elevated ball (as in this experiment) is misclassified as a moving object when it is in fact static, as illustrated in Fig. 14 (c). There have been studies to remove the effect of parallax, as in [45]; however, this requires an additional step that could potentially be computationally expensive. Our method, as explained in Section 2.3, avoids this limitation and can even be utilized as an additional step for obtaining greater reliability when motion-contrast methods are used. In addition, our method does not require the object to be viewed against a planar background. The background can have any structure, or even be absent (as when an object is perceived against a clear sky).

Using the ECM to demonstrate its ability to determine whether an object is moving or stationary within the T90-1 experimental data set. Video sequences are separated by five frames, from top to bottom. (a) shows that the target is determined to be moving as it violates the epipolar constraint as illustrated by (c). (b) provides an example in which the ECM method is fooled by the motion of the target and the UAS, as is illustrated by (d).

Example of a test of the BSM on a moving platform, for an object that is static and raised 1m above the ground. (a) illustrates the stitched images from the on-board camera system. (b) is the egomotion-compensated subtraction of two frames that are 25 frames apart. (c) is an inset for a section of (b) that thresholds for moving objects based on pixel intensity differences in the resulting difference image.
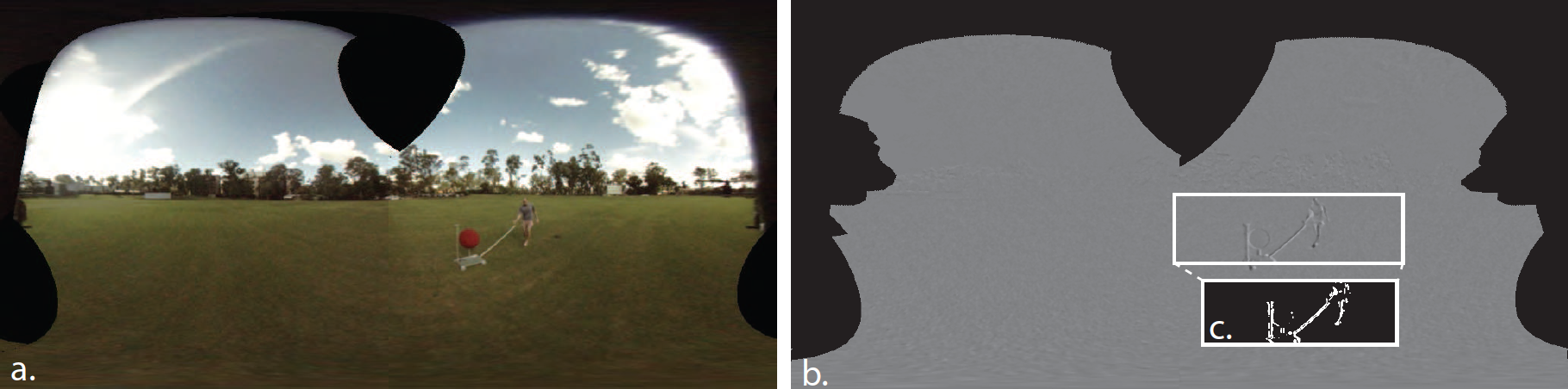
Example of a test of the BSM on a moving platform, for an object that is moving and raised 1m above the ground. (a) illustrates the stitched images from the on-board camera system. (b) is the egomotion-compensated subtraction of two frames that are 25 frames apart. (c) is an inset for a section of (b) that thresholds for moving objects based on pixel intensity differences in the resulting difference image.
TCM also provides a different method for classifying the motion of an object compared to the well-known Epipolar Constraint Techniques. TCM does not use or require stereo. Rather, it compares the ratio of the predicted distances to the target with the measured expansion ratio of the object images, as discussed in Section 2.3. The main problem overcome by TCM when compared to the Epipolar Constraint Method is the issue that arises when the ECM determines an object to be static when, in fact, it is moving along the epipolar constraint – these false negatives are shown by the reduced area of the epipolar constraint's ROC compared to TCM, which is explained by the increased FNs in (10). In this instance, TCM can still correctly determine that the target is moving as it utilizes the expansion of the object in the image.
The performances of TCM, ECM and BSM are evaluated and compared in Section 6 by comparing the thresholds, ROC curves, accuracies and computation times. The area under the ROC plot gives an indication of the overall performance of the system, where an area of 1 (or 100%) represents a perfect classifier. Using the optimal image size (900×550), a ROC area of 83% was computed for the Background Subtraction Method, with a maximum accuracy of 77%. The Epipolar Constraint Method scored an area of 83% on the ROC curve with an 88% accuracy. On the other hand, our TCM method achieves a ROC area of 96% and a maximum accuracy of 95%. It is clear that both the ECM and TCM outperform the BSM, even when computed using a smaller image – this is also verified by [23], where in that study the epipolar technique outperformed homography background subtraction, rank constraint and fundamental matrix methods. By utilizing smaller images and delivering better accuracy, the TCM method provides improved results with a reduction in computation time. The classification accuracy was also used to determine the optimal threshold for each method. It is clear from these tests that our Triangle Closure Method is preferable to the background subtraction technique, because TCM can use a singe threshold that is independent of image size.
Our method was able to correctly classify the motion of the test object, as verified by ground truth measurements for a number of scenarios in each of the experiments. The TS, T45 and T90 scenarios demonstrated accuracies of 92.4, 92.2% and 96.9%, respectively. The slightly smaller accuracy with the T45 test as compared to that of the T90 is not surprising, given the smaller angle between the axes of motion for the quadrotor and the moving object in this case. A smaller θ0 or θ1 will produce a smaller disparity, and if θ0 = 0 in Section 2.2, the disparity is undefined. For a full noise and sensitivity analysis, refer to [36]. Although the Triangle Closure Method has its limitations, it does addresses a number of current issues in the literature for determining whether an object is moving or static, as discussed in the Section 1.
As we are on the cusp of UAS integration into regulated airspace, it is paramount that safety regulations reflect the need for aircraft with situational awareness, in order to minimize the risk of potentially fatal accidents. This is especially critical at the moment, given the rapidly increasing number of UAS and remotely piloted hobby aircraft flying at low altitudes.
The work presented here focuses on this problem by providing a moving platform with the capacity to classify objects as either moving or stationary at low altitudes. Through use of vision-based techniques we can significantly improve our understanding of the surrounding environment, which in turn allows for better control decisions, such as timely and effective evasive manoeuvres, therefore improving aviation safety. Our TCM method can be implemented on various robots (ground and air) and, although this paper uses a vision-based approach, other sensors such as laser rangefinders and the GPS could be utilized to determine the parameters in Fig. 3.
Conclusions
This paper describes a technique, the Triangle Closure Method (TCM), to determine whether an object in proximity to a moving vision system is stationary or moving. We show that TCM, which utilizes the aircraft's translation inferred from the optic flow and the change in size of the object's image, provides an accurate and robust classification of an object's motion status. In field tests, TCM performed better than a traditional background subtraction algorithm and the Epipolar Constraint Method. In summary, the key findings of this study are:
Techniques that rely simply on motion contrast can misclassify stationary objects as being in motion if they are at a different distance to the background (or on the dominant plane).
The epipolar constraint by itself can be fooled when an object moves along the epipolar constraint.
Combining the UAS's egomotion estimate with the object's expansion, as is done in TCM, can overcome some of the limitations of BSM and ECM.
TCM correctly distinguishes between an object that is moving compared to one that is stationary, in a number of scenarios tested onboard a UAS in outdoor conditions.
The major reason for the better performance of TCM is that it overcomes the limitations of other methods, such as various types of background subtraction that are subject to false detections (false positives) of movement introduced by the presence of motion contrast or Epipolar Constraint Methods that can produce false negatives when the object is moving on the constraint plane. Finally, the TCM is a versatile approach for determining whether objects are moving or stationary, which can be implemented on terrestrial and aerial vehicles to facilitate improved control decisions such as timely evasive manoeuvres, thus improving overall transport safety.
Footnotes
Acknowledgements
This article is a revised and expanded version of a paper entitled “TCM: A Fast Technique to Determine if an Object is Moving or Stationary from a UAV”, presented at the Australasian Conference on Robotics and Automation (ACRA) 2015 in Canberra, Australia.
The research described here was supported partly by the Boeing Defence Australia Grant SMP-BRT-11-044, ARC Linkage Grant LP130100483, ARC Discovery Grant DP140100896, a Queensland Premier's Fellowship and an ARC Distinguished Outstanding Researcher Award (DP140100914). We thank Dean Soccol for his assistance with the mechanical aspects of this work.
1
δ is a dimensionless quantity, as it is the difference between two ratios.