
Abstract
This article presents a summary of applications of chaos and fractals in robotics. Firstly, basic concepts of deterministic chaos and fractals are discussed. Then, fundamental tools of chaos theory used for identifying and quantifying chaotic dynamics will be shared. Principal applications of chaos and fractal structures in robotics research, such as chaotic mobile robots, chaotic behaviour exhibited by mobile robots interacting with the environment, chaotic optimization algorithms, chaotic dynamics in bipedal locomotion and fractal mechanisms in modular robots will be presented. A brief survey is reported and an analysis of the reviewed publications is also presented.
Keywords
1. Introduction
Deterministic chaos has been employed for developing consumer electronic products and intelligent industrial systems. Aihara described chaos engineering as broad enquiries on the technical applications of chaos [1–3]. Figure. 1(a) shows the first electrical appliance in the world developed using chaos. Figure. 1(b) illustrates that the comfort provided by the appropriate chaos control is more than that offered by the standard control techniques. A dishwasher with a two-link nozzle represents another application of chaos theory to home appliances, Figure. 2 [4]. A key property of chaos is that simple dynamical systems can often engender complex dynamics. These systems can be implemented using simple analogue hardware [5].

(a) A chaotic kerosene fan heater (b) Thermal sensation vs. temperature swings [3]

Mechanism of dishwasher based on chaos [4]
Chaos and fractals (self-similar, iterated, and fine structures having fractal dimension) are intrinsic features and behaviours in nature. During the last decade, these concepts have been transformed into practical applications. The time is ripe for reviewing the application of chaos and fractals in robotics. The robotics community is trying to emulate these natural behaviours by investigating humanoids, bio-robots and biologically inspired systems such as swarms. These systems confront complex problems such as noise-sensing, vibrations and robot-environment interactions leading to chaos. Similarly, during natural calamities, search and rescue robots have to navigate in a highly irregular and erratic environment in order to handle a motion planning problem. Such nonlinearities have led researchers to employ chaotic motion planning techniques for mobile robots to ensure a rapid search of the whole workspace [6].
The applications of chaos in robotics are classified into two types:
Chaos analysis and
Chaos synthesis.
Chaos analysis implies the observation of chaotic behaviour in robots, whereas chaos synthesis entails the generation of artificial chaos to make different robots accomplish specific tasks [2]. In order to explore the applications of chaos in robotics with reference to both types, this paper is organized as follows: section 2 provides an overview of chaos theory. Section 3 presents chaos analysis in robotics, including (1) initial chaos research in robotic arms, (2) the chaotic dynamics exhibited by mobile robots interacting with the environment and (3) the chaotic behaviour of passive dynamic bipeds.
Chaos synthesis in robotics is presented in section 4 as the application of chaotic systems for motion planning of autonomous mobile robots, the escape from local minima in optimization problems, and the fractal structures for developing versatile modular robots. Section 5 presents the discussion and the conclusion is presented in section 6.
2. Chaos Theory: An Overview
During the 20th century, three great revolutions occurred: relativity, quantum mechanics and chaos. Like the other two revolutions, chaos annihilated the ideology of Newtonian Physics [7]. Chaos theory—also called dynamical systems theory or theory of nonlinear oscillations—is the study of unstable aperiodic behaviour in deterministic dynamical systems, which show sensitive dependence on initial conditions. However, a deterministic law governs their nonlinear behaviour [8, 9]. Chaos lies within a well-ordered arrangement: it is not disorder in the usual sense. The sensitive dependence implies that arbitrary close initial conditions follow trajectories that move away from each other after a certain time, as shown in Figure. 3. The chaotic attractor produced by Lorenz in phase space resembles a butterfly [10]. The butterfly effect has become the emblem of chaos theory (see Figure. 4). It is the widespread name for the sensitive dependence on initial conditions.

Two trajectories that start close to each other but diverge within a few tens of seconds [11]

Lorenz (strange) attractor
Three important properties of deterministic chaos are sensitive dependence on initial conditions, topological mixing (transivity) and dense periodic orbits [8]. It is unpredictable due to sensitive dependence on initial conditions. Due to topological mixing, the system cannot be decomposed into two subsystems. Furthermore, in the middle of random behaviour it owns an element of regularity, i.e., unstable periodic orbits (UPOs). Given the limited accuracy of measurement of initial conditions, a long-lasting prediction of trajectory of initial points is difficult [12]. The chaotic trajectory appears to be random since it does not reveal any periodic pattern.
Due to determinism, chaos is predictable for the short time horizon but unpredictable in the long run due to sensitive dependence on initial conditions. Deterministic chaos is characterized by high sensitive dependence on initial conditions, inability to predict future consequences, the fractal dimension, the Lyapunov exponent and so on. Chaos has been found to arise in a multitude of dynamical systems, from astronomy to zoology [8, 13–15]. This phenomenon and its closely related cousin fractal have been presented as a new paradigm for understanding our world.
Over the last few decades, the terms nonlinear dynamics and chaos have become known to most scientists and engineers. Nonlinearities occur in feedback processes, in the systems containing interacting subsystems and in the systems interacting with the environment. This scenario is quantitatively and qualitatively distinct from the situations in which perturbations develop linearly. It is a striking reality that simple devices, e.g., a double pendulum, and a very complex event such as weather follow the same dynamics, which can be predicted only for short time horizons [6]. Due to the availability of high-speed computers, new analytical techniques and sophisticated experiments, it has become evident that the chaotic phenomenon is universal in nature and has across-the-board consequences in various fields of human endeavour.
3. Chaos Analysis in Robotics
3.1. Initial chaotic dynamics research in various manipulators and robots
Chaos research in robotic systems is the study of nonlinear ordinary differential equations (ODEs) that model the system. In robotics, chaotic dynamics research is not new. Vakakis et al. investigated the nonlinear dynamics of a hopping robot, as shown in Figure. 5, which depends on passive bouncing oscillations for engendering motion [16, 17]. The leg of the hopping robot was modelled as a nonlinear spring. McCloskey and Burdick advanced this hopping robot to a two degrees of freedom (DOF) system by including forward running motion. The period-doubling cascade appeared in a bifurcation diagram (plot of dynamic variable versus the bifurcation parameter) [18].

a) Simplified hopping robot model and b) the return map bifurcation diagram; non-dimensional variable w and non-dimensional parameters, λ and β when β=0 [16]
Lankalapalli and Ghosal demonstrated that nonlinear ODEs, which describe the motion of a feedback-controlled two-revolute robot (undertaking repetitive motions), could display chaos. They presented plots of bifurcation diagrams and used Lyapunov exponents for testing chaos, Figure. 6 [19, 20]. Buhler and Koditschek examined the planar juggling robot. Its task involved robot-environment interactions, which produced nonlinearities [21, 22].

a) A 2R planar rigid robot and b) the bifurcation diagram for θ1 vs Kv (PD controller; Kp = 52) [20]
Mahout et al. proved that a two-revolute joint manipulator controlled with proportional-plus-derivative (PD) law exhibited chaotic dynamics for certain values of static variables [23] (see Figure. 7). Ravishankar and Ghosal probed chaos in feedback-controlled two- and three-DOF robots. Nonlinear ODEs, which depicted the dynamics of a feedback-controlled rigid robot, demonstrated chaos for a certain range of parameters [24]. These analyses signify that chaos is intrinsic to robot dynamics.
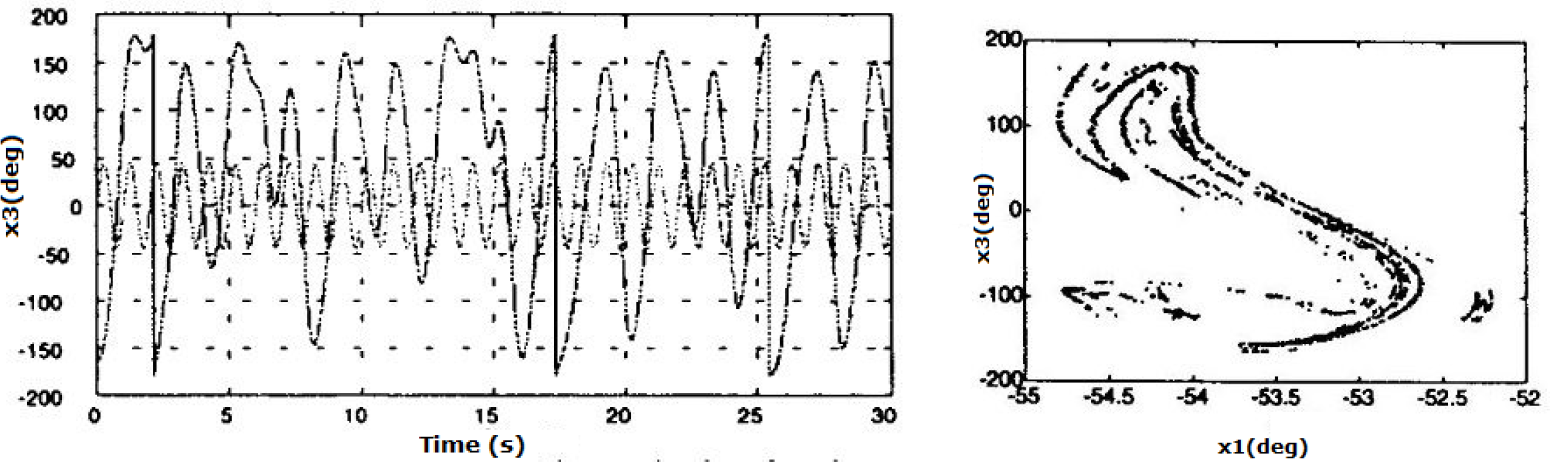
a) Time evolution of the state variable x3 and b) the Poincare's map for x1 and x3 [23]
Wiener's polynomial chaos (PC) presented a framework for separating stochastic elements of a system response from deterministic components. “Polynomial Chaos Theory” is defined as a non-sampling based technique to establish development of uncertainty in a dynamical system, when the system parameters have probabilistic uncertainty [25]. It can be employed for statistical analysis of dynamical systems since it allows probabilistic description of the uncertainty effects. Due to low computational cost, it is an efficient alternative to Monte-Carlo simulations [26]. Figure. 8 showed that PC accurately generated the short-term probability density function (PDF) and indicated the stability of the system response.

Comparison of polynomial chaos and Monte Carlo methods [26]
The design of a commercially produced mechanical system is influenced by the manufacturing variation that affects its performance. Suitable analysis tools are required to simulate and predict the potential dynamics generated by this variation. For conducting such uncertain dynamic and static analyses for a robot manipulator as shown in Figure. 9, PC can be employed as a unifying framework [27, 28].

Polynomial chaos used for measuring performance of a SCARA robot manipulator [28]
The trajectory control of redundant robotic arms is an important area of research that envisions efficient optimization algorithms. A robotic arm is termed as a kinematically “Redundant Manipulator”, if it possesses higher DOF than required to establish any orientation and position of the end effector. In redundant manipulators, inverse kinematics present infinite solutions so they can be configured optimally for an assigned task. Varghese et al. demonstrated that a redundant robot controlled by a feedback linearization technique could display quasi-periodicity and chaos [29]. The standard technique (e.g., closed-loop pseudoinverse control, Figure. 10) suggested for solving their kinematics resulted in chaotic joint motions with erratic arm configurations. The dimension of their dynamic response was found to be fractal [30–32].

3.2. Chaotic behaviour of Robot-environment interaction (REI)
Mobile robotics, like other sciences, should progress from stand-alone existence-proofs (i.e., unauthenticated investigational results) to a research culture of objective duplication and confirmation of experimental results. The grand challenge is to make it a more precise science. For advancing the field of mobile robotics, a quantitative method for the analysis of REI should be developed. A mobile robot is an embodied-situated agent; its behaviour does not depend on the programming alone, but evolves from the interaction between the robot, the task and the environment. The studies in [33, 34] are of valuable information on this domain of robotics.
Schoner et al. were the forerunners who underscored the notion of a unifying theoretical language—the dynamical systems theory—for designing the autonomous robot architectures. In [35], they discussed the key ideas, e.g., phase space, fixed point, attractor, etc., in a tutorial form. Smithers also deliberated the use of quantitative performance measures for the behaviours of embedded-situated agents [36]. He claimed “…Behaviour is not a property of an agent, it is a dynamical process constituted of the interactions between an agent and its environment.”
Nehmzow and Walker argued that, instead of just relying on trial-and–error methods, REI should incorporate chaos theory, which will permit researchers to describe a robot's behaviour quantitatively. A mobile agent interacting with its environment executes a complex operation that is controlled by sensors, actuators and the environment. Due to the noise generated by sensors and actuators this interaction is not always predictable. The behaviour of a robot is nonlinear because its dynamics are the compound result of its environment, the robot and the control programme (task) executed by the agent, as shown in Figure. 11. The robot's trajectory can only be predicted for short time periods [37, 38].

REI can be viewed as an analogue computer, taking environmental, morphological and task-related data as input, and “computing” behaviour as output [39]
Nehmzow and Walker recreated the phase spaces defining robots' behaviours and probed them using the tools of chaos theory. The trajectory of a robot embodies important features of its behaviour. They conducted experiments with various mobile robots implementing obstacle-avoidance and wall-following behaviours; see Figure. 12 and Figure. 13. They reconstructed their attractors from the time series and computed the Lyapunov exponents and correlation (fractal) dimensions of the attractors underpinning the behaviours of the agents (see Table 1) [39, 40].
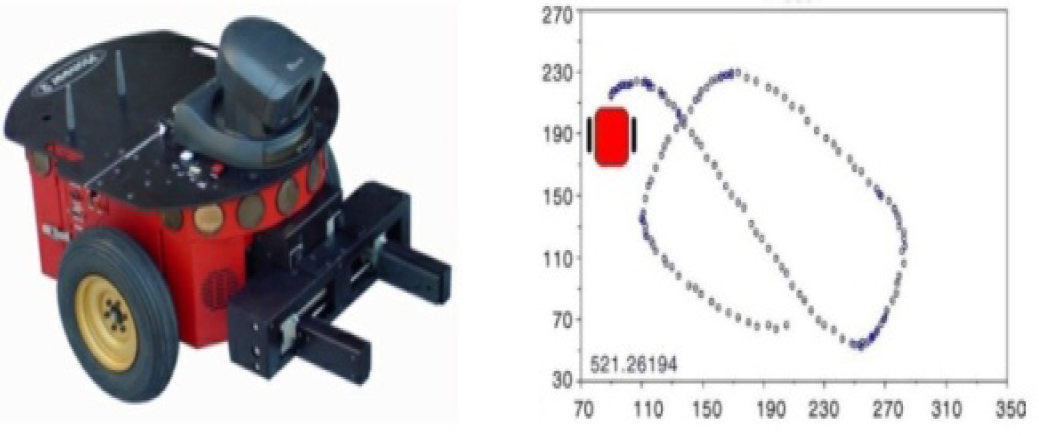
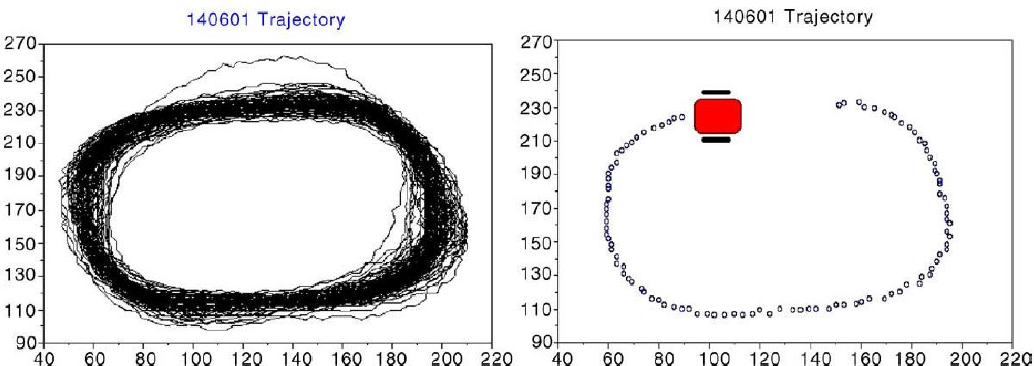
Summary of experimental results [39]

Lyapunov exponent and fractal dimension are two main quantifiers for chaos. Sensitive dependence on initial conditions is the most distinctive property of a chaotic system. Two trajectories in phase space near to each other diverge as time increases. The Lyapunov exponent computes this divergence and a positive Lyapunov exponent represents chaos. Similarly, the correlation dimension of an attractor is a measure of its periodicity in phase space. Periodic attractors have a zero correlation dimension and chaotic attractors possess higher dimensions. These quantitative measures prove that REI exhibits deterministic chaos.
Nehmzow et al. analysed REI quantitatively. They established vital rules for grasping the interaction among the mobile agent, its task and its environment. Such analysis will allow replication and verification of the results.
Like living beings, the sensory information perceived by autonomous robots manifests dynamical behaviour since these data are the outcome of REI. Odagiri et al. investigated the question of whether the internal structure of the agent governs the dynamics of the sensory information or whether the evolved environment determines it. They collected the sensory data from a miniature mobile robot, Khepera, during uninhibited navigation and studied the dynamical behaviour of autonomous agents by analysing this information [41, 42]. Figure. 14(a) explains the experimental arrangement. In four different settings shown in Figure. 14(b), three dissimilar robots were used and the sensory data were collected.

a) Experimental setup b) Tested environments i) maze ii) square iii) dynamic iv) straight corridor [42]
The sensory information obtained from the agents had random elements. The power spectrum for the time series had a continuous component, the maximum Lyapunov exponent was positive, the dimension was fractal (Table 2), the auto-correlation function converged to zero at the infinite time and points in Poincare maps were confined within a certain fixed space. These quantitative measures confirmed that deterministic chaos was demonstrated by the sensory data of the mobile robots. These experiments also revealed that the sensory information flow from agents depended clearly on the inner configuration of the robots.
Correlation dimensions for three robots in four different environments [42]

Rold used chaotic dynamics on autonomous agents controlled by neural networks. He demonstrated that chaotic invariants are dependable estimators for quantifying agent behaviour [43].
3.3. Chaotic behaviour in bipedal locomotion
McGeer pioneered passive dynamic walking (PDW). He experimented with various PDW mechanisms such as the one shown in Figure. 15. This unpowered biped robot walks by dynamics. Its gait is generated automatically by gravity and inertia. Its two major advantages are high efficiency and human-like walking [44–47]. Human walking has become an important biometric identifier [48–50]. The study in [51] provides details on passive bipedal robots.

McGeer's passive dynamic biped—Dynamite [44]

During the last two decades, robotics engineers, biomechanists and chaologists have experimented with many different passive biped models and have uncovered various kinds of chaotic behaviours: period-doubling cascade, intermittency, quasi-periodicity and crises. Some researchers have also investigated chaos control techniques in passive walking. This area certainly calls for further enquiry, particularly chaos control of passive walking. A comprehensive review on the status of chaos research in passive dynamic walking has already been reported in [52].
4. Chaos Synthesis in Robotics
4.1. Chaotic mobile robot
Motion planning or path planning of mobile robots explores an approximate non-collision path consistent with a certain performance objective. This subject has attracted much attention in recent years in robotics. Without mapping, path planning is a difficult task for mobile robots. Chaotic path planning can be a solution to this predicament—the deterministic chaos is being employed for motion planning of autonomous mobile robots in a totally unknown environment. The prime benefit of the proposed chaotic motion planning lies in the deterministic nature of chaotic dynamics. The motion controller for generating chaotic trajectories is designed using a chaotic dynamical system.
Nakamura and Sekiguchi proposed the first chaotic mobile robot that can navigate following a chaotic pattern. As shown in Figure. 17, they proposed the design of a controller that produces chaotic motion using the Arnold equation in a mobile robot [53, 54]. This schema does not need any trajectory planning or workspace mapping. Due to topological transivity the chaotic mobile robot searches the entire workspace and the sensitivity to initial conditions makes the robot exceedingly unpredictable. Random walk is an alternative method for scanning a workspace without mapping, but the proposed scheme is better than random walk.

a) Target searching through a chaotic path b) A prototype of chaotic mobile robot [58]
Jansri et al. experimentally proved that the method of combining chaotic attractors is effective for motion planning of mobile robots [55–58]. They experimented with robot trajectories by employing various types of chaotic patterns; for example, Chua's, Lorenz's and Rossler's attractors. The goal of using these chaotic signals is to enlarge the coverage area of robots. Figure. 17 shows a proposed chaotic robot that is directly controlled by a simple autonomous chaotic circuit. Computer simulations confirmed that Chua's circuit produced the largest possible coverage area [58].
Typically, the dynamic variables of chaotic attractors are used to drive the wheels of differential-drive robots independent from each other. Hackbarth transformed chaotic trajectories to mission space of autonomous agents [59]. The main advantage of using chaotic systems such as Lorenz motion is depicted in Figure. 18, which clearly reveals that a robot searches the working space using deterministic chaos more quickly than when employing random motion.
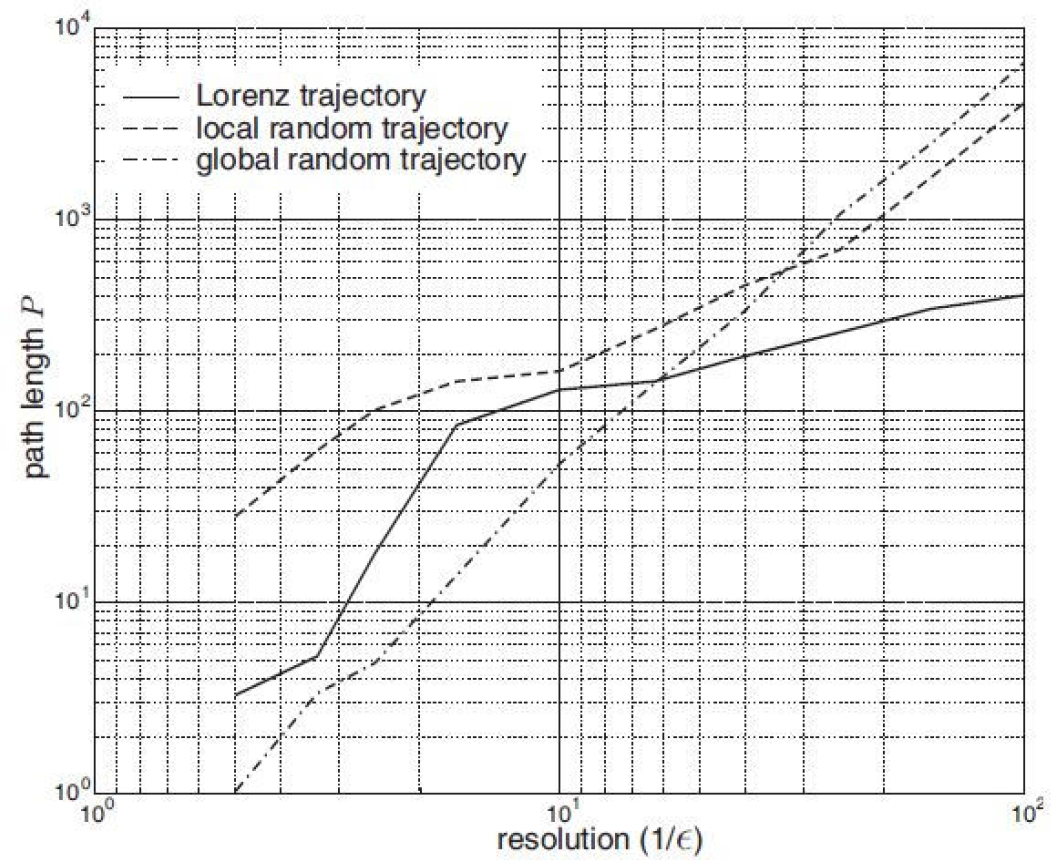
The trajectory length for random movements and Lorenz motion [59]
Similarly, using Lorenz, Hamilton and hyper-chaos equations, Youngchul et al. suggested obstacle avoidance and target searching behaviours for a mobile agent. Figure. 19 presents trajectories of an obstacle avoidance search. Simulation results verified that this technique generated excellent chaotic trajectories [60–62].

Trajectory of mobile robot using Lorenz system [60]
In reference [63], an open-loop control law was proposed by Martins-Filho et al. to produce erratic motions such that the dynamical variables of the Lorenz system were employed to generate the actuation commands for the mini-robot, Khepera. This method resulted in an extreme chaotic motion and the fast scanning of the whole robot workspace. Similarly, they implemented motion trajectories for a mobile agent, as illustrated in Figure. 20, using the Standard map—a dynamical system [63].

Terrain covering using Standard maps respectively with 1,200 points [63].
Likewise, Volos et al. implemented a chaotic path planning generator for a mobile robot to cover an entire workspace in a swift and erratic manner. Figure. 21 shows a Khepera, which is popular in the robotics community, investigating behaviour-based control [64, 65]. Three different chaotic systems were used in the chaotic generator, which produced a double-scroll chaotic attractor as shown in Figure. 21(b). Table 3 highlights the comparison among the coverage rates for these systems.

a) The mobile robot Khepera b) Experimental double-scroll chaotic attractor [64]

Volos et al. also presented a motion control strategy for mobile and humanoid robots using a chaotic truly random bit generator, as shown in Figure. 22 [66, 67]. Using this generator, an autonomous robot was implemented on an experimental platform, the “Magician Chassis”, as shown in Figure. 23. This technique ensured highly unpredictable robot trajectories, which appear random from an observer's viewpoint [68–70]. Numerical simulations confirmed the efficiency of this strategy and statistical tests also ensured the randomness of the planned motions.
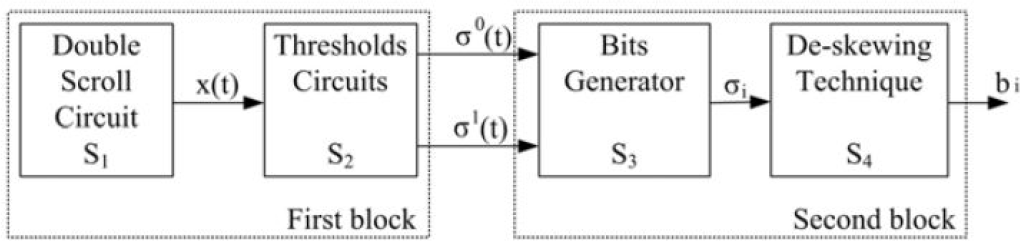
The chaotic truly random bits generator [66]

a) Autonomous robot using the “Magician Chassis” platform b) Terrain coverage of the robot during obstacle avoidance behaviour [69]
Caihong et al. suggested a chaotic path planner based on a logistic map. This simple deterministic system behaved randomly and traversed large workspace coverage [71]. They also presented a fusion strategy based on the Standard map for developing a chaotic path planner for mobile robots [72]. Curiac and Volosencu devised an improved chaotic path planning technique for mobile robots for accomplishing boundary surveillance missions [73].
This research underpins the design and testing of a chaotic controller that integrates a known chaotic equation. While performing surveillance and search tasks, chaotic trajectories for autonomous robots possess remarkable improvement over other methods. The proposed applications of chaotic mobile robots include security patrol, cleaning and firefighting. These efforts indicate that the application of chaotic behaviour of dynamical systems for motion planning of mobile robots is a fascinating interdisciplinary research domain.
4.2. Chaos integration in optimization algorithms
The global optimization methods with a meta-heuristic or stochastic optimization character are called “evolutionary computing techniques”, such as genetic algorithm (GA), swarm intelligence (SI), ant colony optimization (ACO), artificial bee colony algorithm (ABC), particle swarm optimization (PSO) and so on. In nature, swarms solve their problems by group intelligence; best known examples are colonies of social insects such as ants, bees and termites. SI systems typically consist of a population of simple agents interacting locally with one another and with their environment. Swarm robotics is the application of SI principles to robots.
4.2.1. Chaotic Genetic Algorithm (CGA)
A GA is a general purpose search heuristic, which is inspired by genetics and Darwinian selection process. This meta-heuristic is used to generate solutions for optimization and search problems. Many important theoretical and practical problems are concerned with the selection of the optimal configuration or parameter set to achieve a certain objective. Common algorithms rarely solve such problems [74]. Since their inception, they have received a lot of attention because of their potential as optimization algorithms for complex real world problems. The most widely used technique in engineering design optimization (EDO) is GA.
Since dynamical systems containing feedback often produce chaos, it is speculated that chaos is also a component of natural evolution. Determan and Foster incorporated a simple chaotic system—the logistic equation—into a standard GA. The results confirmed that a thoughtful use of chaos in simulated evolution is advantageous [75]. GAs and chaos are techniques that are motivated by nature. Yang and Chen also presented a new strategy of chaotic mutation by combining chaos and GAs [76]. In order to improve the performance of GAs, various chaotic systems have been employed to define new operators, which were applied in these optimization algorithms. Figure. 24 compares performance by using various random and chaotic generators on the Travelling Salesman Problem (TSP) [77]. It is clearly evident from the results that chaotic dynamical systems yield the best performance.

Comparison of performance for various random and chaotic generators [77]
Jia and Wang proposed a chaotic genetic algorithm (CGA) based on the distance-propagation algorithm with chaotic control and prediction that can efficiently predict robot motion. In a dynamic environment, this strategy resolved the path planning problem for mobile robots [78]. Gao et al. also proposed a CGA for motion planning [79]. In comparison with standard GAs, CGA is simple, effective and speedy.
4.2.2. Chaotic Artificial Bee Colony (CABC) Algorithm
Many aspects of the collective activities of social animals such as bird flocking, ant foraging and fish schooling are self-organizing, due to which the complex group behaviour evolves from the interactions of individual members, which behave in a regular fashion. The ABC algorithm simulates the foraging behaviour of honey bees. This meta-heuristic algorithm has a balanced searching and manipulation capacity.
Lin and Huang suggested a novel strategy based on the ABC algorithm hybridized with chaos [80]. This method combined the population-based searching ability of ABC with the searching behaviour of deterministic chaos. Similarly, taking into account various constraints in a complex combat field environment, the path planning of an Uninhabited Combat Air Vehicle (UCAV) is an intricate global optimum puzzle [81]. Xu et al. implemented the ABC algorithm for a UCAV; see Figure. 25. This method has drawn the attention of researchers because of its flexibility, versatility and robustness in deciphering optimization problems. However, it has discrepancies, such as the tendency to converge prematurely and the need of large iterations for the global optimal solution. For averting these problems and expediting the searching process of optimal parameters, the irregularity and ergodicity of the chaotic variable is employed. Figure. 25(b) compares the standard ABC and CABC algorithms, which verifies the efficiency of the new chaos synthesis technique.

a) Typical UCAV battlefield model b) The evolution curves of two algorithms [81]
For a quadruped robot, Lao and Duan suggested a chaotic ABC approach for solving the push recovery problem. The experimental results also verified the efficacy of the proposed algorithm [82].
4.2.3. Chaotic Optimization Algorithm (COA)
During the last two decades, scientists have taken a great interest in developing optimization techniques based on chaotic search routines, e.g., chaotic neural network, chaotic simulated annealing and chaotic search. These chaos-based techniques are more efficient than random search and can escape local minima. Bing and Weisun put forward a chaotic optimization algorithm (COA), which uses ergodicity, regularity and stochastic properties of chaos [83]. COA can solve complicated optimization problems and is faster than the aforementioned algorithms. Hongyan et al. proposed an improved COA for motion planning of mobile robots and the simulation proved that this method was fast and accurate [84].
4.3. Fractal structures in modular robots
The robotics community has keenly researched reconfigurable and scalable distributed robots because they are efficient in unstructured and dynamically changing environments. While maintaining robustness, such modular robots must be hyper-redundant so that they can adjust to any medium. Such robots have been implemented using fractal mechanisms [85]. Fukuda et al. developed a heterogeneous modular robotic system, Figure. 26 [86]. A Self-Reconfigurable Robot (SRR) is a modular system with dynamic reconfiguration ability. SRRs have been inspired by multi-cellular organisms, with the idea that a huge number of organisms can be created from a limited number of cell types. Versatility, robustness and low cost are the main advantages of modular robots [87]. SRRs are built from robotic modules, which themselves are all-inclusive robots, with on-board sources, sensors, actuators and communication capabilities.
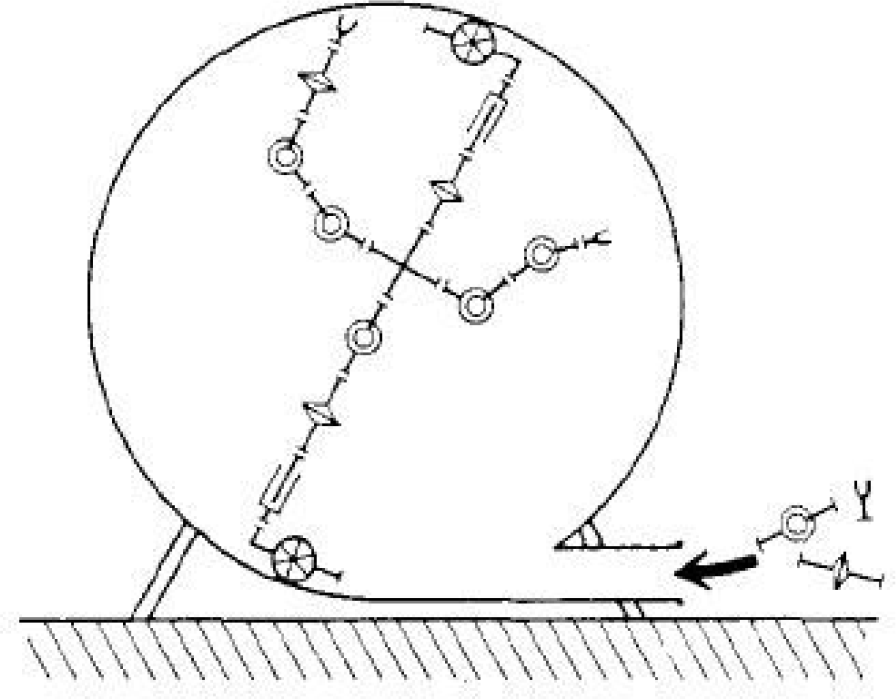
An example of maintenance work in a storage tank by a modular robot [86]
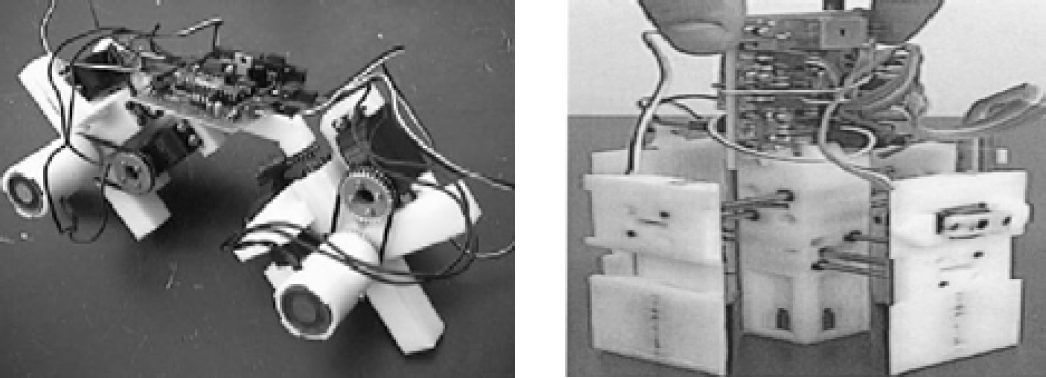
Shahinpoor fabricated deployable fractal mechanisms as smart structures. These devices were multi-axis, multi-arm and multi-finger manipulators with fractal kinematic construction [88]. Chirikjian et al. developed modular robotic prototypes with self-reconfiguration ability [89, 90]. The mechatronic modules of these so-called metamorphic robots are shown in Figure. 27. Figure. 27(b) illustrates the locomotion process.
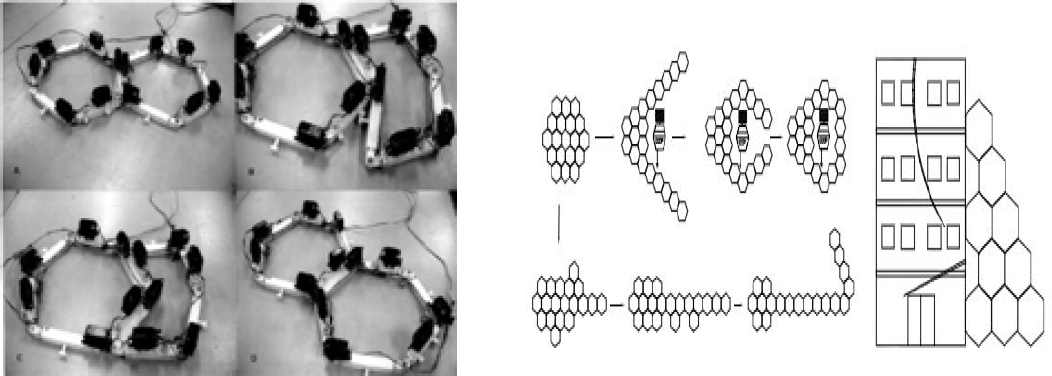
Murata et al. developed symmetric mechanical modules named “fractum” for investigating SRRs [91–93]. Figure. 28(a) exhibits a 2D fractum that, as in Chirikjian et al., utilizes electromagnetism for connection. Figure. 28(b) shows the schematic details of the fracta, which can be connected to assume different shapes as shown in Figure. 28(c) [93]. Having both functional and component redundancies, this identical modular robotic system is capable of self-repair and self-assembly.

a) 2D Mechanical unit “Fractum” b) Schematics of fractum c) Basic Fracta reconfiguration procedure [93]
Rus et al. developed two types of 3D self-reconfigurable mechanisms and analysed a three-dimensional shape-forming algorithm (see Figure. 29) [94, 95]. These fractal robots can adjust their shape and functionality in response to dynamic environments and tasks. Such robots can be used when information is not available beforehand about a task and where robustness is the prime requirement [96, 97]. Modular fractal robotics, having self-repairing capabilities, are currently a popular research theme.
Fractals are scale-invariant structures; the part resembles the whole. Such identical components are being used in modular robots. Scientists have been developing homogenous distributed robotic systems consisting of identical mechanical units. These modular robots are capable of self-assembly and self-repair. The dream of modular robotics has advanced from proof-of-concept machines to sophisticated systems.
5. Discussion
This paper offers a detailed introduction of the concept, function and applications of chaos and, thus, it boosts the research and application of chaos theory to real robots. An introduction to the domain of chaotic and fractal dynamics in robotics has been presented, along with a set of representative applications. These are mere samples of the open frontier that will have enormous impact on the future of robotic systems.
During the last three decades, hundreds of papers have described thriving applications of deterministic chaos in robotics. This article presents representative papers that cover applications of chaotic dynamics in robotics at the time of writing. Figure 30 shows the papers on chaos research in robotics on a lustrum (five years) footing. The noteworthy fact about the rate of growth of chaos-applicative publications in robotics (see Figure 30) is that the number of publications reporting chaos applications has grown nearly consistently for the last two decades.

Chaos research in robotics papers on lustrum (five years) basis
An analysis of the reviewed publications is presented, as the aim of this work is to provide a state-of-the-art vision of what has been done in the domain of chaos research in robotics. Out of 77 reviewed papers, 33 papers (42.9%) are related to the topic of chaos analysis in robotics, whereas chaos synthesis (chaotification) in robotics has a share of 44 papers (57.1%) of the application bibliography. Chaotification is the practice of creating chaotic dynamics in a formerly non-chaotic system. These statistics show that researchers are actively pursuing chaos research in robotics. In chaos analysis in the robotics category, about 20.78% (16 papers) represent initial chaotic dynamics research in the various manipulators and robots. Around 14.29% (11 papers) are related to the second group—chaotic behaviour of robot-environment interaction (REI). The papers on chaotic behaviour in bipedal locomotion represent 7.79% (six). In chaos synthesis in robotics type, papers on chaotic mobile robot are 27.27% (21) of the application bibliography. Around 15.58% (12 papers) represent chaos integration in optimization algorithms. The papers on fractal structures in modular robots also constitute about 14.29% (11) of the application bibliography. These data offers a bird's eye view. For example, we have only hinted at chaos research in PDW in this article, as it has already been exhaustively reviewed in [52].
Firstly, this paper introduces the concept of chaos, which leads to a full understanding of chaos. The theory of chaos divulges our inability to make long-term predictions about deterministic dynamical systems. Chaotic dynamics can be explained, categorized and measured using this theory. Chaos is universal because scientists have found similar nonlinear dynamics in dissimilar dynamical systems such as double pendulums and simple electronics circuits [98–101]. The growth in chaos research is highlighted by the interdisciplinary nature of the field. Due to several applications in electrical appliances such as fan heaters, dishwashing machines and air-conditioners, the application of deterministic chaos has attracted much attention. Deterministic chaos used to be perceived as unpredictable and unstable and hence worthless. In the last few decades its utility and application have been recognized. Like other domains of science and technology, chaotic dynamics have been discovered and implemented in various robotics domains.
Next, some endeavours for uncovering the chaotic behaviour of various kinds of robots were presented. This part provides basic knowledge about the common methods and processes involved in finding the evidence for the existence of chaos in robotic motion, which can help in better application of chaos to real robots. Redundant manipulators and feedback-controlled robots display chaotic and fractal dynamics and mobile robots display chaotic dynamics when they interact with the environment. Polynomial Chaos can be employed for analysing robotic arms and chaos quantifiers such as the Lyapunov exponent and correlation dimension can be employed for analysing chaotic dynamics in REI. Such quantitative analysis will also provide the basis for independent replication and verification of experimental results and will make robotics research a more precise science.
Finally, a number of chaos-based control methods and algorithms were presented, which introduce the typical application of chaos in mobile robot path planning and in improving the efficiency of optimization algorithms. Unlike other path planning methods, chaotic path planning does not require a map of the workspace and it is more efficient than the random walk algorithm. With various chaos equations, a robot could exhibit a range of motion paths. The chaotic controllers can be implemented by embedding simple chaotic circuits into the robots. Chaotic trajectories are generated using state variables of dynamical systems, which are used as input for the wheels of differential-drive robots. Chaos-based control techniques can also be employed to improve the existing optimization algorithms. The researchers have combined chaotic dynamics with major swarm-based algorithms such as ACO, ABC and PSO. By incorporating chaos, Liu et al. proposed a hybrid PSO algorithm, chaotic PSO [102]; it is a synergy of chaotic searching behaviour and the parallel population–based evolutionary behaviour of PSO. Similarly, Gong and Wang proposed a chaos ACO algorithm [103]. Bucolo et al. investigated the advantages of integrating chaos with an ACO algorithm. These chaos-based optimization techniques are better than standard methods in terms of efficiency, searching quality and robustness. How to chaotificate a non-chaotic system by integrating the appropriate chaos equation is the key point in chaos-based control problems.
In recent years, the unearthing of chaos has generated much interest amongst investigators. Deterministic chaos leads to quantitative analysis, which is the gist of science. Despite the many efforts to find evidence for chaotic dynamics in robotics, useful applications of chaos in robotics have rarely been studied. Consequently, chaos has a modest influence on most of the robotics community. We attempted to fill this gap. For instance, the association between chaos theory and the real world is a time-series analysis in terms of nonlinear dynamics. We performed nonlinear time-series analysis of normal and pathological human gaits [45] and a passive compass-gait biped gait [104]. Two chaotic invariants, Lyapunov exponent and correlation dimension, were obtained. These quantifiers demonstrated that walking is a nonlinear process. It was established that the Lyapunov exponent and the correlation dimension could predict the walking stability of a passive walking robot. By comparing the numerical simulation with the results of the nonlinear time-series method, it was found that the walking stability of the passive biped would improve gradually with a reduction in the correlation dimension values. Therefore, the parameters of the robot could be optimized by calculating the relative exponent values under various parameters.
6. Conclusion
In this paper major applications of chaos theory in robotics have been reviewed. Scientists are using chaos theory for understanding the basic principles that govern the interaction among the robot, the task and the environment. Besides the Lyapunov exponent and fractal dimension, other quantifiers should be employed for analysis, which will broaden our understanding of robot dynamics. Until now, researchers have found several routes to chaos in the gait patterns of very simple passive dynamic bipeds. The analyses of complex biped models, which are adequately closer to the behaviour of real biological systems, will provide deep insight into the origin of chaotic dynamics and bifurcation scenarios. Swarm intelligence (SI) has emerged as an interdisciplinary research area for scientists and engineers. Like Chaotic ABC, Chaotic PSO and Chaos ACO should be employed in motion planning of autonomous agents. The applications of chaotic dynamics will generate efficient motion planning techniques for mobile robots. A brief survey is reported and an analysis of the reviewed publications is also presented.
The final aim of robotics is the creation of intelligent autonomous robots. The dynamical system theory is the right answer for a dynamic world. From this review of papers, it is evident that deterministic chaos is an overwhelming idea in science and an omnipresent phenomenon in various robotic domains. Physiological systems are inspiring the control systems and the physical shapes of the robots. Scientists and engineers are striving to realize the decades-old dream of a versatile, mobile, general-purpose autonomous robot. Chaos theory, combined with other important technologies such as artificial intelligence, machine learning and nonlinear optimal control, will help realize this goal in the offing.
Footnotes
7. Acknowledgements
This work was supported by the National Magnetic Confinement Fusion Science Program “Multi-Purpose Remote Handling System with Large-Scale Heavy Load Arm” (2012GB102004). I have greatly benefited from discussions with Muhammad Wasif, Ghulam Abbas, Muhammad Salman Riaz, and Dr. Shahid Rasheed. I express my gratitude to all. It is a short review paper so I apologize to those researchers whose contributions have not been cited. It would be difficult to pin-point all written sources that have inspired this paper. Hence, adopting Seneca's saying “Whatever is well said by anyone belongs to me” [![]() ], I thank all the authors in the references and the anonymous referees for valuable criticism.
], I thank all the authors in the references and the anonymous referees for valuable criticism.