A stochastic consensus problem is studied for a class of continuous-time multi-agent systems with a leading agent. The systems have a switching coupling topology driven by a homogeneous Markov process. The unknown coupling functions among agents are nonlinear or even discontinuous. Under some constraints on the unknown coupling functions, a sufficient condition is provided to guarantee stochastic consensus. The condition is in the form of a linear matrix inequality, which is computationally convenient.
Over the last decade, multi-agent systems have been a popular subject in various research fields, because of their extensive applications in areas such as formation control, flocking, synchronization and distributed inference. In a multi-agent system, each agent interacts with the others in a coupling topology, which usually varies with time. One of the key problems of multi-agent systems concerns consensus, which refers to all agents asymptotically reaching a common state.
For multi-agent systems with an arbitrary switching coupling topology, [1] and [2] provided consensus results using Lyapunov functions and a spinning tree method, respectively. Consensus conditions were presented in [3] and [4] for multi-agent systems with a stochastic switching coupling topology driven by a Bernoulli distribution and a Markov process, respectively. The coupling functions considered in [1–4] were linear. As many applications of multi-agent systems involve nonlinear couplings, consensus with nonlinear couplings has recently attracted enormous attention. For multi-agent systems with directed nonlinear couplings, the consensus problem has been investigated using contraction analysis [5]. For multi-agent systems with undirected nonlinear couplings, [6] and [7] presented frequency-domain consensus criteria using an absolute stability approach [9,10]. Absolute stability theory has also been applied to the problem of directed nonlinear couplings [8], which resulted in linear matrix inequality (LMI) consensus conditions with a fixed coupling topology. The coupling topologies in [5–7] had arbitrary switching conditions.
The above research on nonlinear couplings has not considered stochastic switching coupling topologies. In fact, the couplings among agents usually have certain stochastic properties. In particular, in many multi-agent systems, the conditional probability distribution of future switching of the coupling topology depends only upon the present coupling topology. Hence, the stochastic switching can be described by a Markov process. In addition, [5–8] assumed that the coupling functions among agents were continuous, or even differentiable. This assumption imposes some restrictions on the applicability of discontinuous nonlinear coupling functions. This paper explores consensus conditions in the form of LMIs for continuous-time multi-agent systems with a Markov switching coupling topology, a leading agent and unknown directed nonlinear couplings. Our results can be applied to discontinuous nonlinear coupling functions.
The remainder of this paper is organized as follows: Section 2 introduces the model and the problem description. A stochastic consensus condition is developed in Section 3. Section 4 presents a numerical example and the paper is concluded in Section 5.
2. System Modelling
Let ℜ denote the field of real numbers, ei the ith real coordinate vector, the identity matrix of dimension n and the zero matrix. The matrix is the transpose of the matrix A. For a square symmetric matrix A, denotes the minimal eigenvalue of A and A<0 indicates that A is a negative definite matrix. defines the expectation. ⊗ is the Kronecker product of matrices.
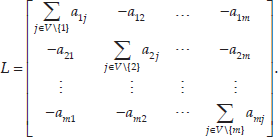
A directed graph, denoted by , consists of a node set and an arc set . The coupling topology of a multi-agent system can be described through a directed graph: node i represents agent i and arc (i, j) represents a directed coupling from agent j to agent i. For a directed graph D, the adjacency is given by
and the Laplacian matrix L is defined as
This paper considers multi-agent systems in a stochastically switching coupling topology. For the multi-agent system considered, we have p Laplacian matrices . The multi-agent system has a time-varying Laplacian matrix
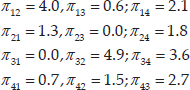
is driven by a continuous-time homogeneous Markov process and takes values in with transition probabilities
where
are the known switching rates,
and , .
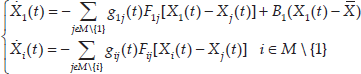
The continuous-time multi-agent system studied in this paper is modelled as
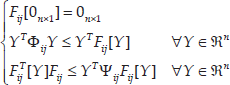
where time ; is the state of agent 1 at t; is the state of agent i at t; is a prescribed target point; is a known matrix; and the nonlinear maps and represent couplings among agents. From model (2), it can be seen that only agent 1 is made aware of target point . Accordingly, agent 1 is called the leading agent. For any and any , the nonlinear map is unknown, but subject to
where and are known positive definite matrices with . Map may be discontinuous.
which is the sector-shaped restriction in the absolute stability approach. In other words, condition (3) can be viewed as a multi-input–multi-output version of sector-shaped restriction.
The multi-agent system is said to reach stochastic consensus if ,
In the next section, we derive conditions for stochastic consensus.
After the offset, (2) is transformed into the equivalent
From (3), we know that is an equilibrium point of system (5). Denote
For any and , denote
By erasing the diagonal entries of in (1), we obtain
Taking advantage of , B, C, F[] and , multi-agent system (2) is expressed concisely as
with an equilibrium point .
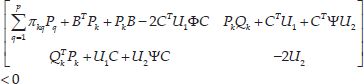
THEOREM 1: For multi-agent system (2), suppose that there exist positive definite , positive definite diagonal and positive definite diagonal , such that ,
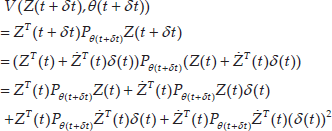
We have , the weak infinitesimal operator (a stochastic analogue [11–13] of the deterministic derivative)
From this,
Thus, we see that
Combining (7)–(10), we have that, for any nonzero , ,
The positive definite Lyapunov function with means that ,
Applying
(11) implies that , i.e., system (2) reaches stochastic consensus.
4. Simulation
In this section, an example is developed to illustrate Theorem 1. The example considers a multi-agent system consisting of six agents with a Markov switching coupling topology. The dimension of each agent is one. At any time, the time-varying coupling topology is one of the four coupling topologies displayed in Fig. 1. Therefore, m=6, n=1 and p=4 in the example. In addition, let and
Four coupling topologies
For the unknown nonlinear couplings, set the coefficients of the bounds as
The other and are set to zero.
According to Theorem 1, an LMI is constructed for the example. The MATLAB LMI solver can be used to compute the LMI. The computation obtains positive definite and positive definite diagonal , which satisfy the LMI of the example. In other words, our example meets the condition of Theorem 1 with the above coupling topologies, transition probabilities and sector-shaped restriction bounds. Hence the multi-agent system of the example can achieve stochastic consensus.
As a simulation case, we give the directed coupling from agent j to agent i as
which satisfies condition (3). Figure 2 illustrates the graph of . Clearly, the coupling is discontinuous. With the initial state
Graph of coupling
and the target point , multi-agent system (2) was simulated using MATLAB. Figure 3 shows the state trajectories, which clarify that a consensus has been reached about .
State trajectories
5. Conclusion
We have studied the stochastic consensus problem of continuous time multi-agent systems with unknown nonlinear couplings and Markov switching coupling topologies. A sufficient condition for stochastic consensus has been presented. A simulation example was provided to illustrate our results.
Footnotes
6. Acknowledgements
This work is supported by the National Natural Science Foundation of China (grant nos. 51405430, U1509210 and 61473258), the National High-Tech R&D Program (863) of China (grant no. 2012AA041703) and Public Welfare Technology Application Research Plan of Zhejiang (grant no. 2016C33G2010137).
References
1.
Olfati-SaberRMurrayR. M. (2004) Consensus problem in networks of agents with switching topology and time-delays. IEEE Trans. Automatic Control, 49(9): 1520–1533.
2.
RenWBeardR. (2005) Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Trans. Automatic Control, 50(5): 655–661.
3.
HatanoYMesbahiM. (2005) Agreement over Random Networks. IEEE Trans. Automatic Control, 50(11): 1867–1872.
4.
ZhangYTianY. (2009) Consentability and protocol design of multi-agent systems with stochastic switching topology. Automatica, 45(5): 1195–1201.
5.
ChenFChenZXiangL. (2009) Reaching a consensus via pinning control. Automatica, 45(5): 1215–1220.
6.
ProskurnikovA. (2014) Frequency-domain criteria for consensus in multiagent systems with nonlinear sector-shaped couplings. Automation and Remote Control, 75(11): 1982–1995.
7.
ProskurnikovA. (2013) Consensus in switching networks with sectorial nonlinear couplings: Absolute stability approach. Automatica, 49(2): 488–495.
8.
LiRLiuBLiuC. (2013) Absolute stability and master-slave synchronization of systems with state-dependent nonlinearities. Mathematical Problems in Engineering, 2013: Article ID 326560.
9.
LiaoX. (2006) Absolute Stability of Nonlinear Control Systems, Beijing: Science Press.
10.
AizermanM AGantmacherF. R. (1964) Absolute Stability of Regulator Systems, San Francisco: Holden-Day.
11.
JiYChizeckH. J. (1990) Controllability, stabilizability, and continuous-time Markovian jump linear quadratic control. IEEE Trans. Automatic Control, 35(7): 777–788.
12.
KushnerH. (1967) Stochastic Stability and Control. New York: Academic.
13.
WonhamW. M. (1971) Random differential equations in control theory. In: Probabilistic Methods in Applied Mathematics, Vol. 2, Bharucha-ReidA T Ed. New York: Academic.
14.
LiuYHuangWJiangY. (2014) Quick attribute reduct algorithm for neighborhood rough set model. Information Science, 271: 65–81.
15.
LiuYTangFZengZ. (2015) Feature Selection Based on Dependency Margin. IEEE Transactions on Cybernetics, 45(6): 1209–1221.
16.
JiangYXuYLiuY. (2013) Performance evaluation of feature detection and matching in stereo visual odometry. Neurocomputing, 120: 380–390.
17.
LiuYXiongRLiY. (2014) Robust and Accurate Multiple-camera Pose Estimation Toward Robotic Applications. International Journal of Advanced Robotic Systems, 11(153).