
Abstract
A new design of a robust impedance controller for constrained robotic manipulators is presented. The main objective is to stabilize asymptotically, in the task space, the robotic manipulator's end effectors into a desired position, via a desired contact force under model uncertainties and measurement noise. In this work, the proposed approach is enough straightforward for application without force and position control separation. Robust asymptotic stability in the approach is proved using a Hamiltonian-Lyapunov approach. Besides this, a state/parameter observer and an acceleration estimator are proposed to handle the problems of force estimation, disturbance rejection and acceleration measurement. To ensure high performance, a Particle Swarm Optimization (PSO) algorithm is used finally as an efficient and fast method for the offline fine-tuning of the controller's parameters. In designing the PSO method, the Mean of Root Squared Error (MRSE) is considered as a cost function in the Cartesian space. Finally, the example of the ABB-IRB 140 industrial robot with 6DOFs is used to validate the performances of the proposed approach.
Keywords
1. Introduction
Control of constrained robotic manipulators that are subject to uncertainties is currently considered to be one of the most challenging problems in the field of robotics [1]. Uncertainties can include the environment model [2–5], the robotic model [6] or both [7, 8]. To solve such complex problems, there is an increasing requirement for robust asymptotic stability of the nonlinear system, taking account of coupling effects between multiple joints and considering position/force interaction between the manipulator and the constrained environment.
The difficult problem of position/force control of constrained robotic manipulators was discussed, without considering such uncertainties, in several books [9, 10] and survey papers [11–15], in which different solutions are provided. Evidently, this problem becomes more difficult when uncertainties occur. One of the most popular approaches used in this field is that of impedance control [16–18]. The advantage of impedance control is that it can regulate the environmental forces according to the specified mechanical impedance, such as mass, stiffness coefficient and damping coefficient. Impedance control can reduce the damaging of end-effectors by assigning the proper damping coefficient. However, such an approach needs force measurements that are rendered by the constrained robot, which complicates the experimental implementation of the control law. Indeed, the generation and sensing of force is one of the most crucial theoretical and experimental issues facing researchers in the robotics field, since it is not always possible in practice to measure forces rendered by the environment using a force sensor. Moreover, it is well known that force and torque sensors are very sensitive to noise and disturbances. Therefore, to overcome this problem, some solutions using force observers have been deployed [19–21]. On the one hand, it is well recognized in the robotics literature that acceleration measurement is not a reasonable solution. Some techniques have also been proposed to avoid such a problem [22–23].
On the other hand, tuning the controller parameters to ensure high-accuracy and high-speed performances [24] has remained, until now, a very expensive and time-consuming process. Soft computing techniques [25] have been widely used in order to reach such objectives and were well justified for solving the control problems for hard nonlinear problems [26]. Alternatively, an extensive range of new, biologically inspired optimization methods [27] has emerged. These methods use random elements iteratively in order to transform one candidate solution into a new and better solution with regard to a given fitness function. The main nature-inspired optimization approaches are Genetic Algorithms (GA), Simulated Annealing (SA), Tabu Search, Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO) algorithms. Among the variety of evolution algorithms, the Particle Swarm Optimization (PSO) algorithm [28, 29] seems to be one of the most promising techniques, since it requires less computational complexity and gives better performances. In particular, PSO algorithms were applied successfully in many robotic applications [30–34]. Nevertheless, only a few research papers were devoted to solving the control problem of constrained robotic manipulators [35, 36] using PSO. In competition with them were a few research papers proposing use of neurofuzzy controllers in order to solve the robust control problem for constrained robotic arms [37–40].
Based on the lack of results within this framework, the most important contribution of this paper is its proposal of a new design for a PSO-robust controller of constrained robotic systems with model uncertainties and measurement noise. Furthermore, new robust stability conditions of constrained robotic manipulators are proved to be effective using a Lyapunov-Hamiltonian approach. In addition, a state/parameter observer and an acceleration estimator are proposed to handle the problems of force estimation, disturbance rejection and acceleration measurement.
The remainder of this paper is organized as follows. In Section 2, the robust control problem is stated. The state/parameter observer is then described in Section 3. Section 4 presents the acceleration estimator. The robust asymptotic stability conditions, using the Lyapunov-Hamiltonian-based impedance controller for constrained robotic systems, are given and proved in Section 5. Section 6 details how a PSO algorithm was used to optimize the controller parameters. Finally, in Section 7, the example of the 6DOF ABB-IRB140 robotic manipulators used in order to demonstrate the performance of the proposed approach.
2. Problem Formulation
Consider a constrained robotic manipulator with n degrees of freedom described by its uncertain dynamical model, a forward kinematical model and a differential kinematical model defined, respectively, by:



where θ, θ, θ̈ ɛ Rn are the joint position, the joint velocity and the joint acceleration vectors, respectively; M ɛ Rnxn and ΔM ɛ Rnxn are the inertia matrix and its related matrix uncertainty, respectively; H (θ, θ, α0) ɛ Rn and ΔH ɛ Rnx1 are the vector of centrifugal and Coriolis forces and its related vector uncertainty, respectively; G(θ, α0) ɛ Rn and ΔG ɛ Rnx1 are the vector of gravity terms and its related vector uncertainty; α0 is the vector of the nominal inertial parameters of the robot, assumed to be constant; U ɛ Rn is the control vector and F ɛ Rp is the vector of contact forces exerted by the robot on the environment where the task-space dimension is p; X, Ẋ ɛ Rp are the Cartesian position vector and the Cartesian velocity vectors, respectively;
Given a desired constant Cartesian position Xd ɛ Rp, a desired force Fd ɛ Rp of the robotic manipulator's end-effector, the control problem aims to ensure that:

and

under the following assumptions:
A5: The Jacobian matrix J (θ) is of full rank and bounded for all θ ɛ Rn.

where Kd, Bd, Md ɛ Rpxp are stiffness, damping and inertia matrices, respectively, and s is the Laplace operator.

where γ and β are two small constants.
Notation:
In the following, the sign function is defined by:
Furthermore, we define the integral of a real vector function f = (f1 …, fn) on the interval [a, b] as the integral of each of its components, as in [43]:

3. The State/Parameter Observer Design
Consider, now, the robotic model (1). It can be written, without any restriction, as follows:

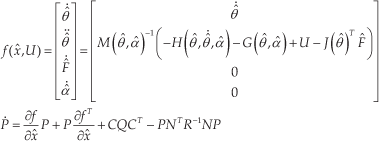
By defining the state vector as x =[θ θ F α] T , the dynamic model (8) of the robot manipulator can be written in the state space as:

where Y is the output of the system; C is a unit matrix; N =[I I I I] is the state observation matrix;
Theorem [19]
Assume that the linearized model of the nonlinear system (9)- (10) is:
uniformly completely observable
uniformly completely controllable
α1 ≤ Q(t)≤α2
α3 ≤R(t) ≤α4
then the optimal filter is described by


is uniformly asymptotically stable where:

α1, α2, α3, α4, α5, α6, α7 are positive constants; cov(ζθ), cov(ζθ), cov(ζ F ), cov(ζ x ) and cov(η x ) are the covariance matrices of the input noises ζθ, ζθ, ζ F , ζα and the output noise η x , respectively.
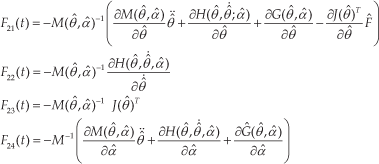
4. Angular acceleration estimation
Using (3) for the estimated position and velocity vectors, we can write:

From equation (6), we can write the following using estimated variables:

From equations (13) and (14), the expression of

5. Robust Control-based Lyapunov-Hamiltonian Approach
The constrained robotic system described by the uncertain dynamical model (1), the forward kinematical model (2) and the differential kinematical model (3) is asymptotically stable for the contact force model:

via the robust control law described by:

where σ is a linear function defined by:

for a positive constant gain K, a constant vector C ɛ R1
xp
and the positive constant matrices

or

Considering the uncertain robotic manipulator described by the uncertain dynamical model (1) for the force model (16) and the nonlinear control law (17), we have:

In addition, denoting by

In order to alleviate the notation and tacking in account of the assumption

Following the same developments presented in [44] and for a kinetic energy defined by:

while taking into account the assumption


Impose, now, on the system (22) a Lyapunov-Hamiltonian function defined by [44]:

where:

and following the developments presented in [44], the first Lyapunov condition is always satisfied. Furthermore, since M (Φ) is positive-definite and since the following condition is satisfied:

we can then prove that the second Lyapunov condition is well satisfied if (Kp + Kd + Kf Kd) is positive-definite.
To prove the third Lyapunov condition, let us give the derivative of the Lyapunov function (28) as:

From (23) and (24) we can write:

From (25) we can write that:

Using (31) and (32), we can write for (30):


Using the kinematic model for the error dynamics, (34) gives:
Considering assumption
6. PSO Controller Design
Inspired by the study of swarms, the Particle Swarm Optimization (PSO) method is considered to be one of the fastest evolutionary algorithms. During flight, each particle adjusts its position according to its own experience and the experience of other particles, making use of the best positions encountered by itself and its neighbours. The best previous position of the ith particle is recorded and represented as pbest,i. The best particle among all the particles in the group is represented as gbest. The PSO concept consists of changing, at each time step, the velocity of each particle i toward its best positions and gbest. For each iteration of k(k = 1, 2, …, N), the ith particle (i = 1, 2, …, M) updated its velocity and position as [28]:


where the inertia weight w( k ) is calculated according to the following equation:

where:
M number of particles in a group
N maximum number of iterations
Vi(k) velocity of the ith particle at iteration k
pi(k) position of the ith individual at iteration k
pbesti(k) best position of the ith individual at iteration k
gbest( k ) best position of the group until iteration k
w( k ) inertia weight factor at iteration k
c1, c2 acceleration factors
rand (.) random number between 0 and 1
Rand (.) random number between 0 and 1
The PSO algorithm for the controller parameter's design is shown in Figure 1.

PSO algorithm for the tuning of the controller parameter
7. Application
7.1 The robot arm with model uncertainties
Consider the 6DOF industrial robotic manipulator ABB-IRB140 (see Figure 2). Its D-H parameters are given in Table 1. The numerical values of its nominal physical parameters (mass, length, position of its centre of gravity and inertia parameter) for each rigid body are given in [45].
D-H parameters of the industrial robot ABB-IRB140
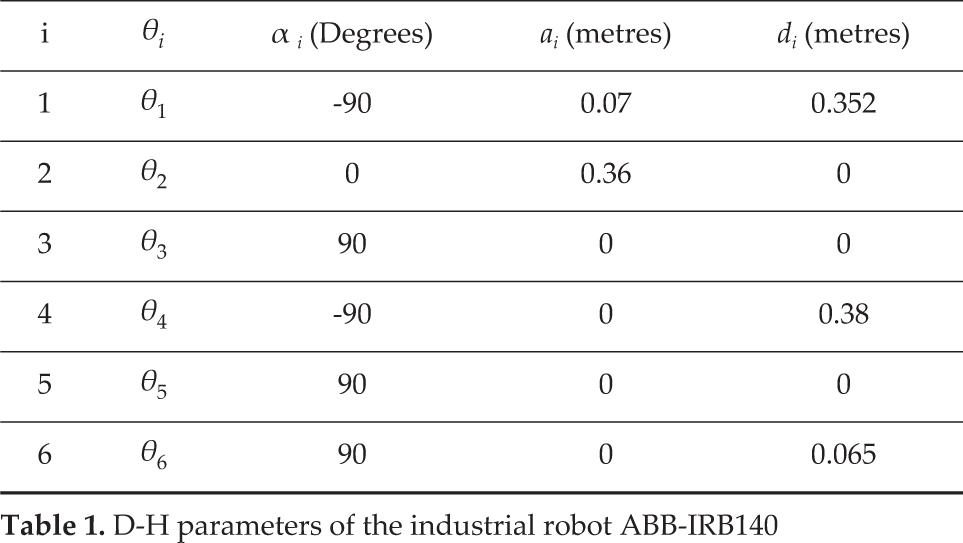

The industrial robot ABB-IRB140 [46]
7.2 The constrained optimization problem via PSO
A fundamental step in applying the PSO algorithm is the choice of the cost function or the performance index used to evaluate the fitness function of each particle. Based on the control objectives (4) and (5), we have chosen to solve a constrained multi-object optimization problem, where the two objectives to be reached are really in conflict and the stability conditions (19) and (20) are considered as constraints. We propose, therefore, using the Mean Root Squared Error (MRSE) cost function defined by [36]:
For the first case in which the stability conditions (19) are satisfied, the individual member of the swarm comprises the elements of the following vector
Let the desired stiffness, damping and inertia matrices be defined by components in the Cartesian space:

Minimize
MRSE
subject to:




and for i=1,2



and:

The relations (40) and (41) represent the dynamic and the kinematic constraints of the optimization problem, whereas the inequality constraint (42) is equivalent to the stability condition (19). The inequalities (43)- (46) define a set of lower and upper bounds of the decision variables chosen with regard to practical implementation. The equality constraint (47) is equivalent to the chosen impedance dynamics (6).
Minimize
MRSE
subject to (40), (41), (43), (44), (45), (46) and:

and:
The inequality constraint (48) and equality constraint (49) are equivalent to the stability conditions (20) for some chosen impedance dynamics (6).
7.3 PSO-robust controller's simulation results
Simulation results are carried out considering the stability conditions (19) and (20) as two case studies. The robustness of the proposed approach is proved, considering sensory noises in the joint position and joint velocity measurements (Gaussian noise of 0.2° mean and 0.2° standard deviation for the joint position measurements, and 0.2°s−1 mean and 0.2°s−1 for the joint velocity measurements), and for uncertainties of each link mass (20% of each nominal mass parameter of the robotic system). The desired contact forces, stiffness, damping and inertia parameters for the two case studies are given in Table 2, whereas the PSO algorithm's parameters are given in Table 3.
Desired impedance parameters

Parameters of PSO algorithm

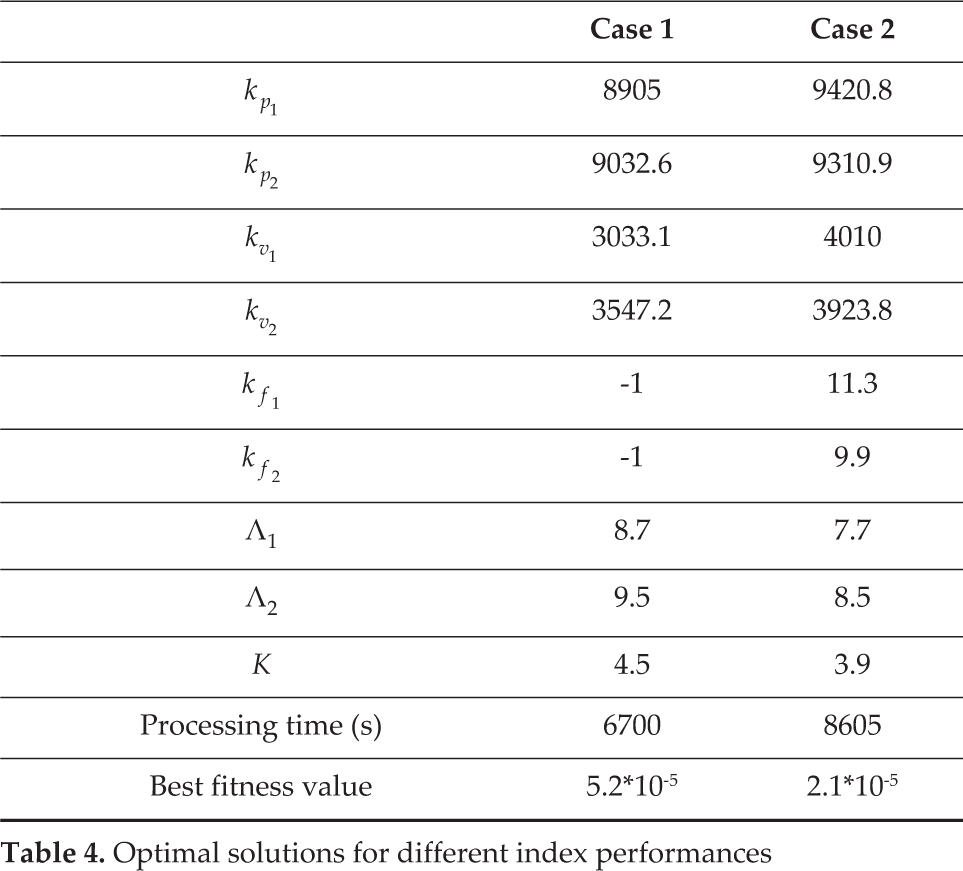
For C = [1 1], the optimal solutions for the controller parameters are reported in Table 4.
Optimal solutions for different index performances
Figures 3 and 4 illustrate the performances of the constrained robot in reaching the desired positions. Figures 5 and 6 show the shape of the constrained forces. Figure 7 shows the smooth profile of the controller laws. To avoid cluttering the paper with simulation results, only the angular velocity for the first case is shown by Figure 8.

Cartesian Position on the X-axis: (a) case 1, (b) case 2

Cartesian Position on the Y-axis: (a) case 1, (b) case 2

Constrained forces in the X-axis: (a) case 1, (b) case 2

Constrained forces on the Y-axis: (a) case 1, (b) case 2

Control laws: (a) case 1, b) case 2
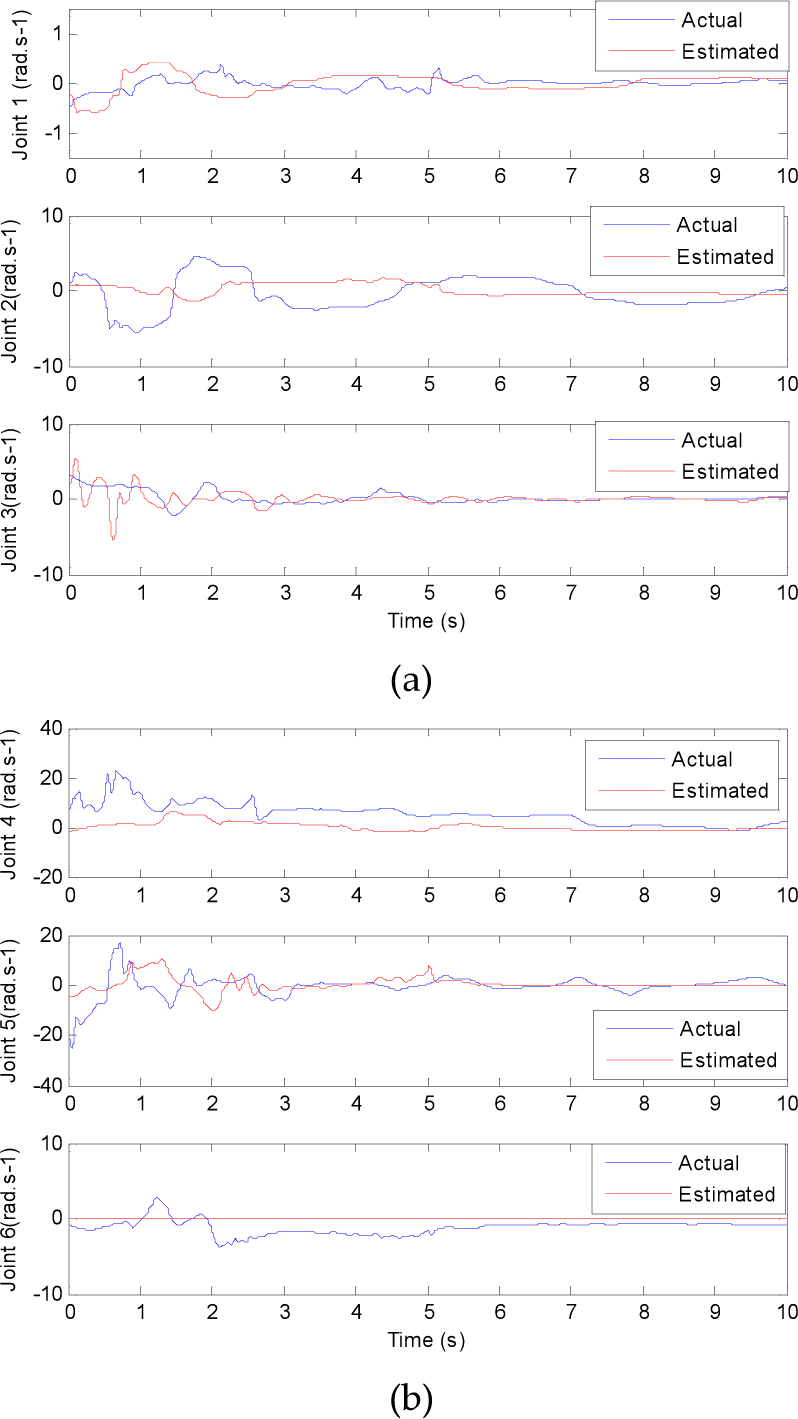
Angular velocity: case 1
Simulation results prove that the state/parameter observer can yield good performances for force estimation where the control law ensure asymptotic stabilization for position and force stabilization in presence of measurement noise and parameter uncertainties.
8. Conclusion
In this paper, a PSO-robust impedance controller for constrained robots is proposed using a state/parameter observer and an acceleration estimator. New sufficient conditions for asymptotic stability using a Lyapunov-Hamiltonian approach are given. Notwithstanding the high number of the controller parameters, the PSO algorithm used gives satisfactory performances for the ABB-IRB140 industrial robot. The proposed controller allows the constrained robotic manipulator to be stabilized in order to obtain desired Cartesian positions and desired forces, even in the presence of model uncertainties and sensory noises. Simulation results prove the asymptotic stability and robustness of the proposed control scheme.