
Abstract
This paper presents a robust bio-inspired sliding mode control approach, designed to achieve a favourable tracking performance in a class of robotic manipulators with uncertainties. To this end, brain emotional learning-based intelligent control (BELBIC) is applied, to adaptively adjust the control input law in the sliding mode control. The combined form provides an adjustment of the control input law that effectively alleviates the chattering effects of the sliding mode control. Specifically, the online parameters computed from the parameter uncertainties and external disturbances help to improve the system robustness. The simulation results demonstrate that the proposed bio-inspired control strategy is very successful at tracking the given trajectories with less chattering as compared to both the conventional and fuzzy sling mode control schemes.
Keywords
Introduction
Sliding mode control (SMC), derived from variable structure theory, has been widely used as a promising robust control strategy against system uncertainties and external disturbances [1–5]. In this way, the system dynamics is invariant to any uncertainties that might undermine the system performance, while the system states lie on the sliding mode. [6–8].
Meanwhile, there are still two challenging problems: the chattering phenomena may excite high-frequency dynamics, and there is not yet a reliable way of acquiring knowledge of the bounded uncertainties [5]. To alleviate these drawbacks, many researchers have investigated a variety of SMC strategies, attempting either the reduction of chattering or the information acquisition of bounded uncertainties [5, 9, 10]. Remarkably, in [9], S. Tong et al. developed the stable adaptive fuzzy SMC for non-linear multivariable systems with unavailable states. Y. Zhao et al. have presented an enhanced fuzzy SMC for improving the tracking performance of robotic manipulators, with an adaptation mechanism to tune the gain of the sliding mode controller [10]. In [11], G. Zhao et al. describe a two-faced decoupled SMC for a class of underactuated mechanical systems without degradation in performance. A new sliding mode observer approach for rejecting actuator faults through an offline static compensation of quantization effects has also been presented [12]. In this regard, the application of the brain limbic system (BLS) control strategy to an SMC is intended as a way of achieving the proper control input to decrease the above-mentioned disadvantages.
In cognitive science, BLS control (also referred to as BELBIC: brain emotional learning-based intelligent control), which aims to generate the appropriate inputs from relevant signals through brain emotional learning processes, has been applied to a wide range of research. In particular, as pioneers of the BLS controller, Lucas et al. developed an intelligent controller based on Moren's discovery and named it “BELBIC” [13–16]. A. R. Mehrabian et al. utilized the BLS controller to eliminate a tracking error in a flight control system [17]. In [18, 19], a BLS control scheme is considered for the kinematic regulation of the position error in both a mobile robot and a redundant robotic arm. Most significantly, the BLS control strategy has been shown to improve performance in many applications, compared to the results of other intelligent controllers, such as the neuro-fuzzy approach [20]. Therefore, the adaptive learning processes involved in BLS control would seem well-suited to tackle the two above-mentioned problems affecting SMC, compared to other SMC strategies.
In this study, an SMC with BLS control for an uncertain robotic manipulator is suggested. The dynamic characteristics of a general robotic manipulator are outlined in Section 2. Section 3 and Section 4 explain the concepts of the conventional SMC and the BLS control strategy. In the following section, the proposed bio-inspired SMC strategy and its stability are addressed. In Section 6, the simulation results demonstrate that the proposed control strategy is effective in tracking the given trajectories with less chattering. Section 7 summarizes the conclusions.
The Dynamic Characteristics of a Robotic Manipulator
In the presence of uncertainties and external disturbances, the dynamic equation for an n-link manipulator can be expressed as follows [1, 2]:

where
Equation (1) can be rewritten as

If all uncertainty elements are assumed to be lumped, the dynamic model can be expressed as [5]

where
The construction and control of the sliding surface (also called the switching surface or sliding manifold) is very important for keeping the non-linear plant's state along the boundaries of the control structure. Ideally, the trajectories would lie on the smooth sliding surface for all subsequent time, if infinitely fast switching were possible. However, in reality, the switching input control strategy based on user-defined gains shows a chattering phenomenon around the zero value [1, 2].
The sliding surface can be defined as

where Λ and
The tracking problem here must be overcome on two levels [5]: the first level is to keep the system trajectory on the sliding surface, and the second is to move along the sliding surface to the goal state. Once the existence of a sliding surface is guaranteed, it is asymptotically stable.
The derivative of the sliding surface is expressed as follows:


Block diagram of a conventional SMC strategy
As a part of the control input, the equivalent control input (in Figure 1) is expressed as follows:

Furthermore, a control input, u r (t), which compensates for the unpredictable perturbations, is calculated using

where
Thus, the total input vector,

The human brain is composed of a number of lobes supporting a variety of emotional processing functions. The BLS within the brain structure generates the appropriate stimuli from relevant signals, through the brain's emotional learning processes. The most important parts of the brain for emotional processing, and their corresponding functions, are as follows [13]:
amygdala: maps sensory stimuli to their associated emotional responses;
orbitofrontal cortex: inhibits inappropriate links when a goal changes;
sensory cortex: generates the sensed input via the incoming sensory stimuli; and
thalamus: communicates between sensed inputs and the other parts of the brain limbic system.
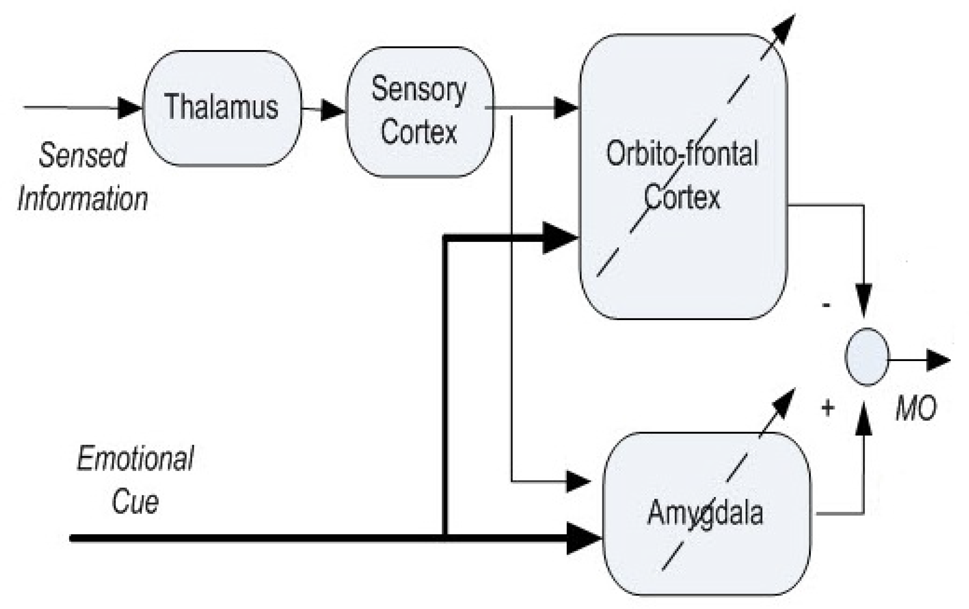
A computational model of BLS [19]
As shown in Figure 2, this paper uses a mathematical model of the brain limbic system's emotional learning and signal-processing mechanisms, as developed by Moren and Balkenius [13, 14]. An emotional stimulus-response is considered along with two-process learning and signal processes. [15] This model involves two inputs and a output: the sensory input (SI), the emotional cue signal (EC), and the BLS output (MO) [13, 19].
The BLS control output is defined as a summation of the outputs of both the amygdala and the orbitofrontal cortex:

where the subscript j represents the j th sensing flow (or j time loop).






The outputs of the amygdala and the orbitofrontal cortex are explained in Equations (10)–(15), respectively.
This work considers a new, robust bio-inspired sliding mode control, designed to achieve a favourable tracking performance in a class of robotic manipulators with uncertainties. In order to eliminate the chattering problem that affects the conventional SMC, brain emotional learning-based intelligent control is applied to a sliding mode control approach. This combined learning and adaptive control scheme functions to adjust the effective control input law, to alleviate the chattering effects of the sliding mode control.
To this end, this work presents a novel robust SMC strategy, which replaces the term
As shown in Figure 3, this paper introduces a new adaptive control input term,
These two variables are defined as


where γ j = √σΔx j 2, 0 < μ j < 1, 0 ≤ δ < 1, j = 1,2,3, …, n; γ j , μ j , and δ are the user-defined values; and x j is the distance between the robot's current position and a target goal at the j th sensing flow.
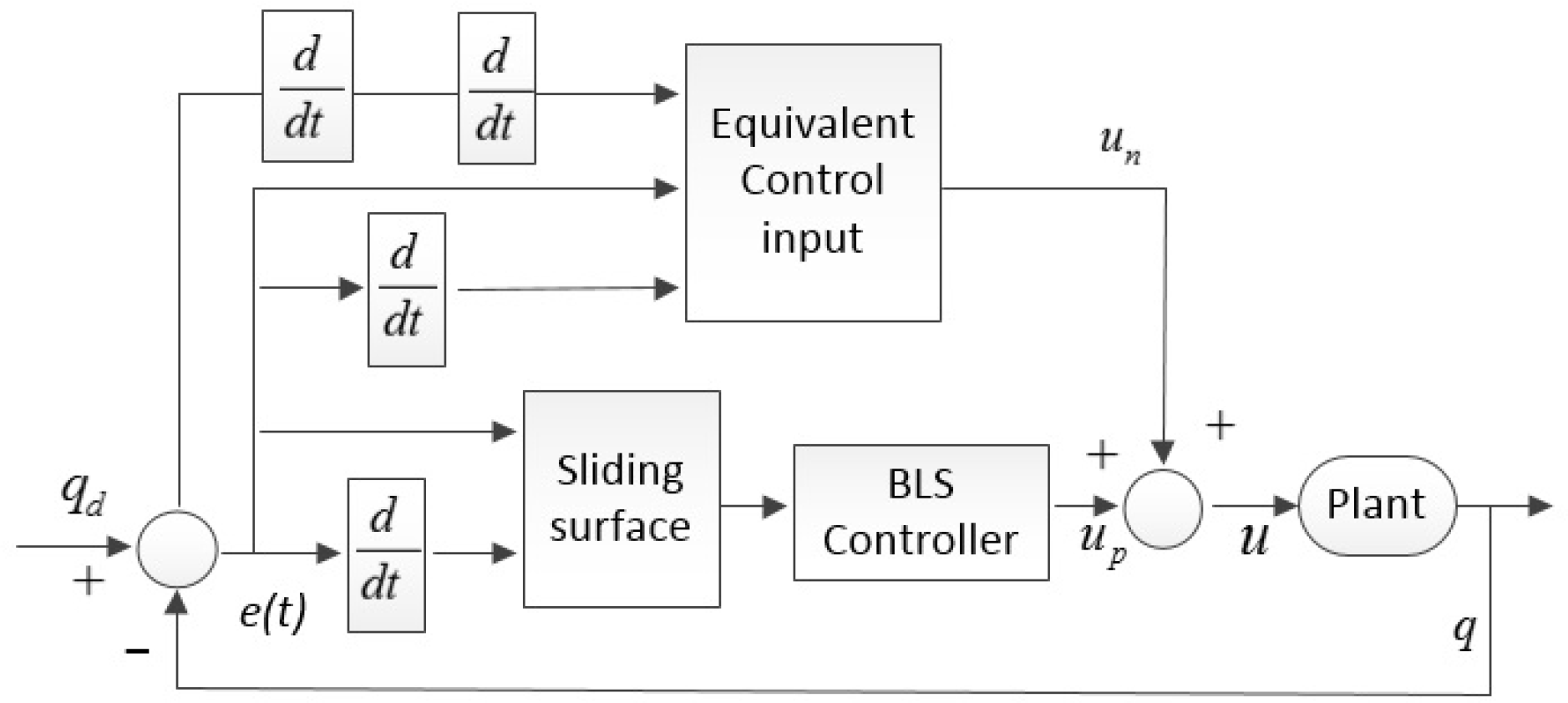
Block diagram of the proposed SMC strategy
Combining the above equations with Equations (9)–(15) can generate the optimal control output (

where A B denotes the elementwise product of matrices A and B, and K r is a square diagonal gain matrix. The aim of this scheme is to design the appropriate control output, in response to the distance between a current position and a target goal.
Then, the total input vector can be represented as follows:

In this study, Lyapunov stability analysis is employed to evaluate the existence of a sliding mode [3, 8]. In an n-input/n-output system, each component y i of the output vector may be assigned its own sliding manifold independently. The sliding manifolds and the time derivative can be addressed as [3]


where

The Lyapunov function and its time derivative for each component can be chosen as follows:


As a result, Equation (24) can be rewritten as [6]
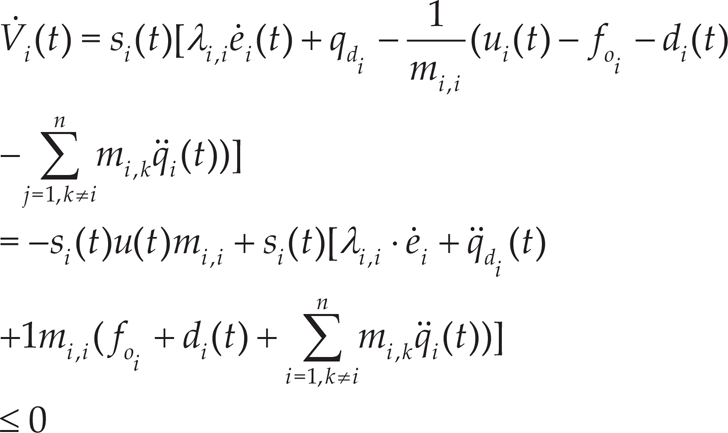
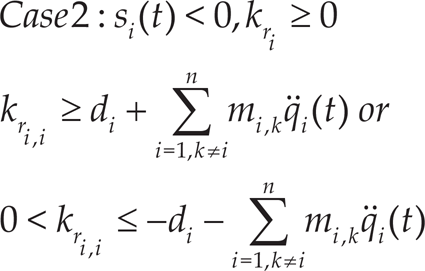
Substituting Equation (19) into (25), the proper gain of the proposed SMC law, which guarantees for the existence of the sliding manifold, can be addressed as follows [6]:


Proposed link model: (a) the side view, (b) the skid map
In this study, we have chosen the smallest magnitude value of control gains, k r i,i , obtained from Equation (26). The proposed control scheme also shows the same computational complexity as other intelligent SMC approaches, such as fuzzy SMC. It allows the transformation of a controller design problem for a general n-th order system into a first-order stabilization problem, associated with the proposed switching function.
Model
In this study, the versatile 3-DOFs link (composed of three subsystems), as seen in Figure 4, is considered for verifying the effectiveness of the proposed control scheme [18]. As a modular link, this link is designed to realize the self-arranged motion needed to complete multiple required tasks, in response to changing circumstances.
The first subsystem has a function of adjusting the link length between 180 and 210 mm. In particular, the elongated length (by 25 % of nominal length) plays an essential part in achieving a relatively larger reachable workspace. A ball screw mechanism and miniature linear guides prevent the bending of the link and accomplish elongation motion. The movement of the second subsystem is the unconstrained rotation of the link about its centre axis. The third subsystem has a constrained joint (limited to ±45deg) at O3, and a bevel-gear set between two adjacent links at O ee [21].
The dynamic equation of the proposed link can be expressed in the following vector form:

where

In this study, the tracking control is tested to identify the effectiveness and robustness of the proposed control approach. Under the modelling uncertainty and external disturbance, the tracking performance of the suggested SMC strategy for given reference trajectories (in Figure 5) is compared to that of both conventional and fuzzy SMC strategies. To investigate the effectiveness of the learning process, each of the three joints tracks three cycles of the given trajectories, over a 2.5 sec period. In these simulations, two parameters (length and mass) have their uncertainty modelled with the maximum 10% variations, with respect to nominal values [21]. The fixed slope of the sliding surface is set at 5 for all joint variables. External disturbances at each joints are assumed by τ d 1 (t) = 2sin(t) + 0.2, τ d 2 (t) = sin(t) + 0.1, τ d 3 (t) = 0.5sin(t) + 0.1, respectively.
From the simulation results, it is concluded that the proposed robust SMC approach was shown to perform effectively for each of the three joints. Under identical values for

The given trajectories of each joint: (a) joint 1, (b) joint 2, (c) joint 3
To confirm the validity of the proposed approach, the proposed tracking control is compared with those of the fuzzy intelligent SMC schemes [5, 9, 10]. Commonly, fuzzy SMC is applied to highly non-linear systems with large parameter fluctuations. This method can be effectively applied in the presence of uncertainties, and is especially appropriate for the tracking control of robot manipulators.
To this end, a fuzzy SMC input in this study was designed using the following term,
Fuzzy Rule Matrix

Compared to fuzzy SMC, the proposed method shows a large initial error and rapid convergence to zero error. While fuzzy SMC has error terms on the given trajectories, the proposed method doesn't have any large residual error after 0.2 sec. The fuzzy SMC scheme has almost the same magnitude of residual tracking error as that of the conventional one.
Furthermore, as shown in Figure 7, the proposed strategy only commands the adaptively large control force inputs when each joint faces the changing direction of each trajectory (at t = 1.25, 2.5, 3.75, 5, 6.25 sec). In simulation tests, the conventional SMC control inputs showed either positive or negative gain values (k r 1,1 = 2500, k r 2,2 = 800, k r 3,3 = 800), which are the user-defined values. Compared to the switching values of the conventional SMC, the adaptive control input (between two values) in the proposed control strategy enhanced the robotic system by reducing the chattering phenomenon.
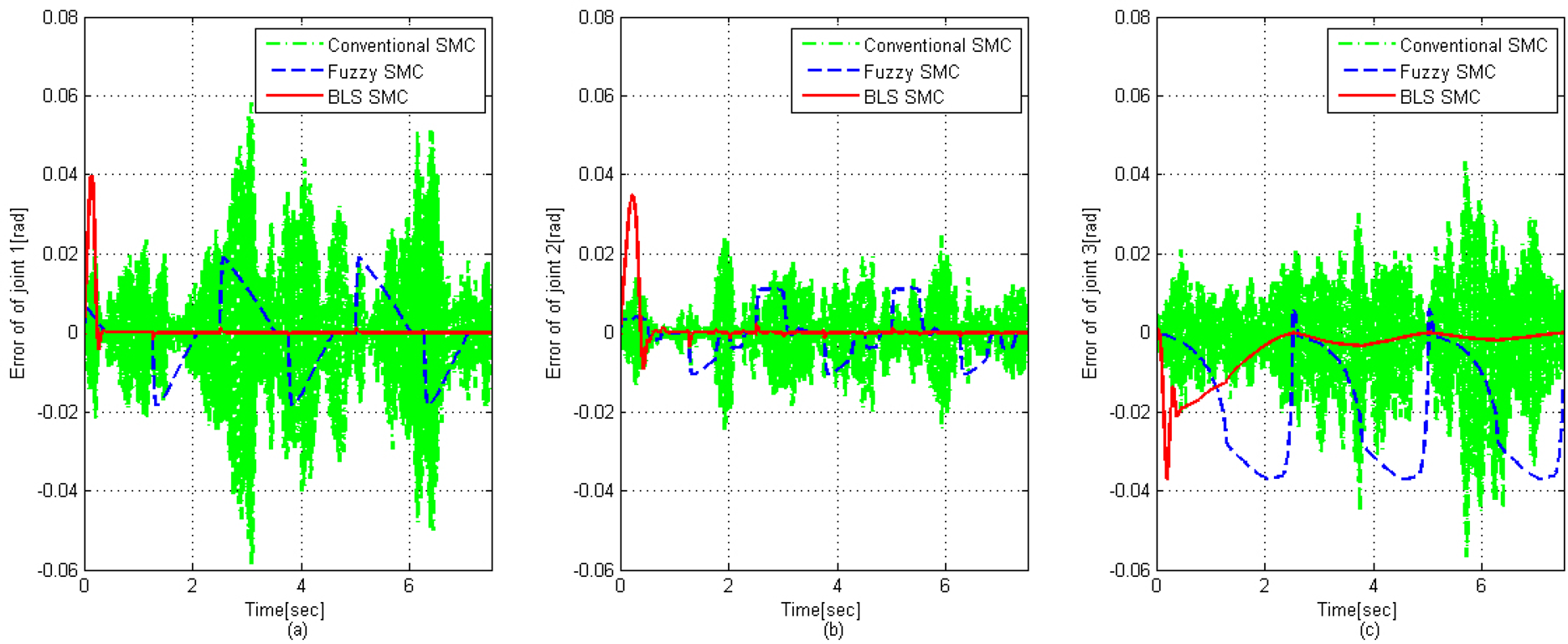
The tracking errors of each joint: (a) joint 1, (b) joint 2, (c) joint 3

The control input for uncertainties and unexpected external torque: (a) joint 1, (b) joint 2, (c) joint 3
This paper presents a robust bio-inspired SMC approach, designed to achieve a favourable tracking performance in a class of robotic manipulators with uncertainties. The knowledge gained from the simulation results shows that the proposed approach achieves the desired performance for tracking reference trajectories. Firstly, compared to conventional and fuzzy SMCs, the proposed control strategy adaptively compensates for parameter uncertainties and external disturbances. Secondly, it leads to a reduction in the chattering phenomenon when tracking the given trajectories, when compared to the results of a conventional SMC. It also provides additional effectiveness when tracking the given trajectories, leading to fewer tracking errors. The learning process of the BLS implements the performance of both the conventional and fuzzy SMC approaches. Future works will further extend the experimental verification for evaluating the robustness of the proposed control scheme.